動態光源位置及照度控制系統的研制
2019-02-21 09:32:10馮文濤曹民李抒智
光學儀器 2019年4期
馮文濤 曹民 李抒智
摘要:為了加強對動態光源的控制,利用LabvIEw的比例一積分一微分(PII))控制方法,研制了動態光源的位置及照度控制系統。該系統通過控制電機改變光源的位置,采用LabVIEW的PID控制及參數自整定模塊對輸出電流進行控制,以改變動態光源的照度。研究表明,該系統可有效控制動態光源的位置及照度,在用于檢測攝像機動態范圍時,能有效提高檢測效率及檢測精度。
關鍵詞:動態光源;PID控制;參數自整定;LabVIEW
中圖分類號:TP311 文獻標志碼:A
引言
動態光源就是光度、色度等參數可以變化的光源。目前動態光源在治療失眠、提高工作效率等方面發揮著一定的作用,為此本文研制了一個基于LabVIEW的動態光源位置及照度的控制系統。
本文使用LabVIEW進行編程,LabVIEW中的比例一積分一微分(PII))控制模塊具有應用范圍廣、算法簡單、魯棒性好的優點,而且PID控制不依賴被控對象的精確數學模型,已成為目前工業控制中運用廣泛的控制方法。因此本系統采用PID控制模塊對動態光源的照度進行控制,這樣不僅可以增加響應速度,而且可以減小系統穩態誤差。為了實現對動態光源的位置控制,通過程序控制電機帶動蝸桿蝸輪導軌轉動來實現。由于研制的系統能對光源照度實現精確調節,所以還可應用于攝像機動態范圍的檢測中。
1系統組成
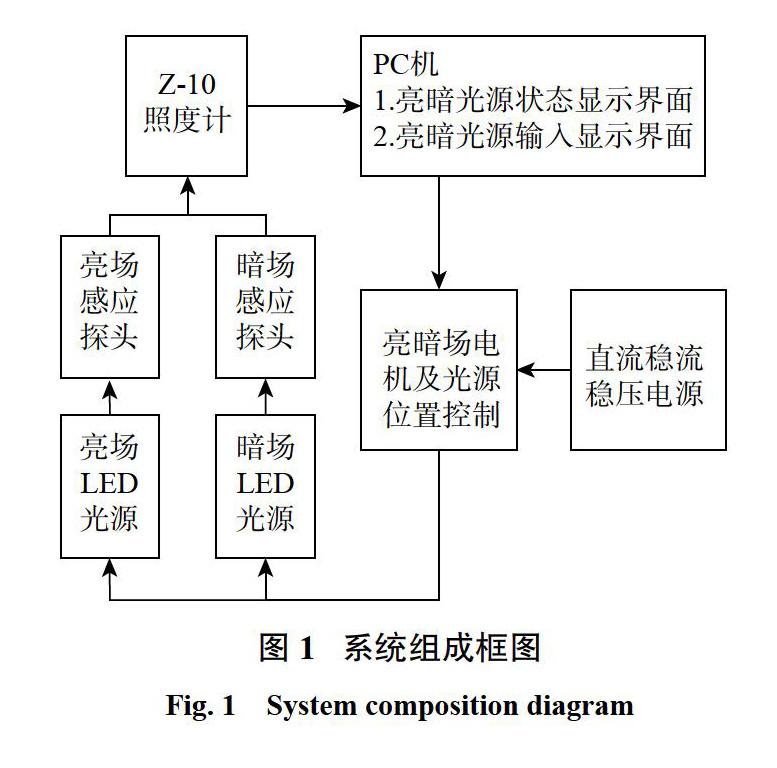
圖1為動態光源位置及照度控制系統的主要組成部分,由PC機、運動控制卡、伺服電機、直流穩流電源、動態光源(LED燈)、照度計等組成。采用LabVIEW編寫系統的控制軟件,通過雷賽DMC2210運動控制卡以及雷賽ISS57-體簡易伺服電機對光源的位置進行控制。動態光源選擇LED光源,該光源是根據電流的大小來決定照度的大小,系統可以通過更改直流穩流電源的電流輸出來改變LED光源的照度。
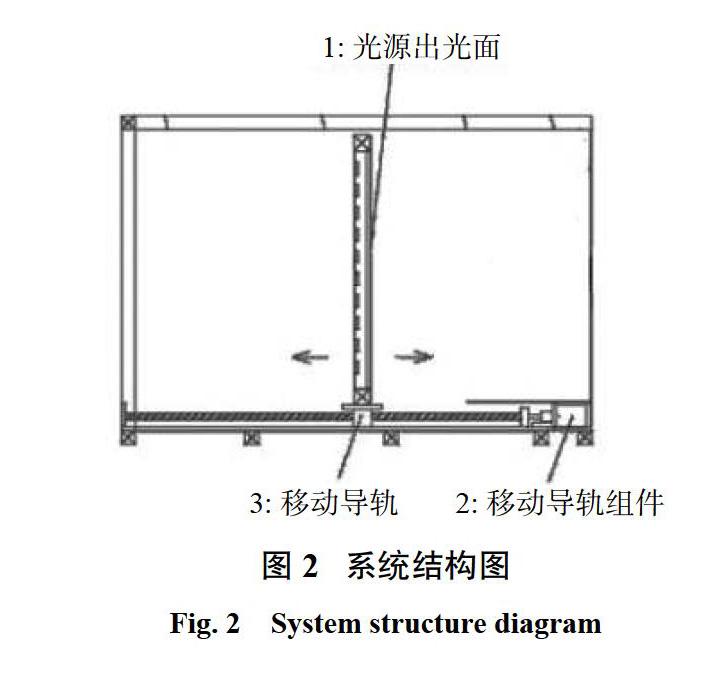
動態光源位置及照度系統結構圖如圖2所示。系統導軌組件在電機的控制下,帶動固定在移動導軌上的光源沿導軌左右平移,從而實現光源位置的改變。
2控制程序設計
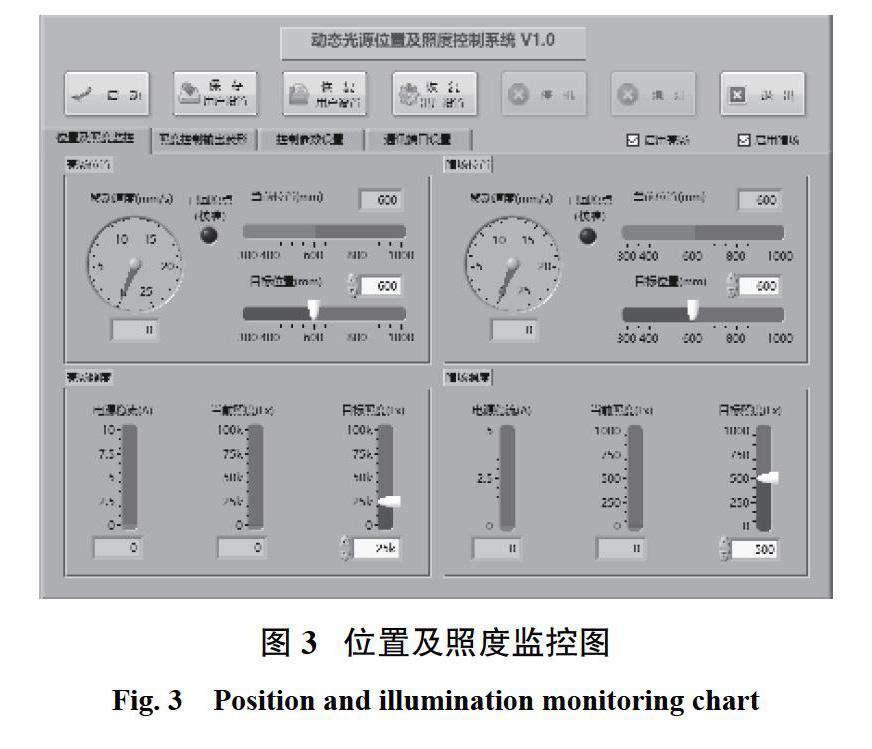
為了實現對動態光源位置和照度的控制,本系統使用LabVIEW進行編程。控制程序主要有三個:位置及照度監控、照度控制輸出波形以及控制參數設置。
位置及照度監控圖如圖3所示,此面板主要是針對亮暗場光源位置以及照度進行實時控制。控制參數設置圖如圖4所示,此面板主要是針對系統的控制參數進行設置與顯示,包括電機的行程參數、亮暗場的PID增益系數、電流穩流輸出范圍、電源地址碼、采樣時間等。
3算法設計
3.1基于LabVIEW的PID控制算法設計
PID控制器主要利用LabVIEW中的PID控制模塊進行設計。PID控制增益系數包括比例增益(Ko)、積分時間(Ti)、微分時間(Td),首先調節比例增益,使系統能快速響應,之后分別調節積分時間與微分時間,使控制器對轉速信號的控制達到理想狀態。
PID控制器將設定點(Sp)與過程變量(pv)進行比較,以獲得誤差(e);比例控制可以減少控制器增益誤差的時間;基于LabVIEW的PID控制中,通過梯形積分可以避免在pv或sp突然改變時積分作用的急劇變化;偏微分作用是,當sp突變時,只對pv施加導數作用,而不是誤差e,以避免導數反沖。
在對PID控制器的設計中,通過對輸入差值、比例、積分、微分的控制計算出適合本系統的PID控制器的實用模型,該模型可表示為
3.2基于LabVIEW的PID參數整定方法
在動態光源的位置及照度控制系統中增加PID參數自整定模塊,并通過PID增益預整定方法可以使系統的快速響應、穩態誤差等特性得到增強。
基于LabVlEW的動態光源暗場的照度PID自整定設計方案如圖5所示。
4測試分析
4.1暗場輸出波形分析
為了驗證動態光源位置及照度控制系統的正確性與有效性,將該控制系統應用于攝像機動態范圍的檢測中,并試制樣機。在樣機測試中,動態光源亮場和暗場分別置于兩組互不干擾的測試區域,樣機可以同時控制兩個區域進行檢測,分別求出動態范圍的最大值和最小值。以動態光源暗場為例,其輸出波形如圖6所示。
由圖6可以看出:在初始時間系統暗場的照度值為01X,將目標照度設定為500lx后,當前照度在1.5 s的時間內快速上升并達到目標照度,隨后出現超調達到最高值,并在9 s后趨于穩定,達到目標照度。電流波形與當前照度波形趨勢相同。暗場照度與電流波形符合PID控制原理,實驗結果與預期相符。
4.2動態光源系統應用于攝像機動態范圍檢測
攝像機的“動態范圍”是指攝像機對拍攝場景中景物光照反射的適應能力,及攝像機對圖像的最“暗”和最“亮”的調整范圍。目前,確定攝像機成像器“動態范圍”的主要方法是,使用灰階測試卡和動態光源來收集和觀察圖像,并測量動態范圍級別。目前使用灰階測試卡這種方法依然存在一些問題,例如各個光源參數設置采用手動模式,測試精度以及測試結果的一致性不足等。通過加入動態光源位置及照度的控制系統,可以有效改善目前攝像機動態范圍檢測的不足。
攝像機動態范圍檢測試制樣機如圖7所示。
通過加入動態光源的位置及照度控制系統使得試制樣機在測試中性能得以改善,其優點如下:(1)兩組LED光源之間完全獨立,沒有任何串擾,光源功耗小,其色度、亮度等光學參數一致性好;(2)通過亮場與暗場光源的同時控制,大大提高了攝像機動態范圍檢測的效率;(3)LED光源組件的光學參數設置及調整,以及被測設備之間的距離及位置調整,均采用計算機控制,使得整個測試設備操作方便,測量精度大大提高。
5結論
本文針對動態光源的控制,研制了一個可以同時控制光源位置與照度的系統。系統測試結果表明:光源照度經PID參數自整定控制器調節后,其輸出波形基本符合PID控制理論;將該系統應用于攝像機動態范圍的檢測測試平臺中,解決了目前攝像機動態范圍檢測中無法自動調節光源亮度以及檢測效率不高的問題,通過亮場、暗場光源同時控制以及照度PID參數自整定調節的引入,有效提高了對攝像機動態范圍的檢測效率及精度。