大型裝船機電氣系統設計簡述
2019-02-22 02:35:06王敏田焱清
中國設備工程 2019年2期
王敏,田焱清
(上海振華重工(集團)股份有限公司,上海 200125)
大型的裝船機本身是由伸縮臂架、俯仰臂架、大車行走和除塵臂架皮帶輸送機等機器構成的。裝船機本身的工況非常復雜,而且內部蘊含諸多類型的驅動裝置。大型的裝船機的生產率普遍被控制在6000t/h左右。而從總體構造來看,大型的裝船機是由控制部分和傳動部分組成的。而從整體構造來看,控制系統是由Profibs-DP系統、工業總線和PLC部分組成的。傳動系統主要是由保護單元、測量單元、交流變頻機電和逆變器組成的。大型裝船機械系統中的電氣系統是各個不同機構中的動力裝置,從而才能夠更好地實現無極調速,真正使得整體的裝船機能夠實現平穩操作。本文主要對大型裝船機電氣系統的設計結構進行全盤的論述。
1 大型裝船機的簡介
大型裝船機本身是在碼頭裝船時所使用的一種最主要的機械。它主要是由臂架皮帶機、中繼尾車皮帶機、伸縮溜筒、走行裝置、門架、塔架、俯仰機構和回轉機構等部分組成。這種大型的設備本身在能源、電力、冶金和港口等一些行業的發展中都發揮著非常重要的作用。而大型的裝船機一般都是以連續裝船作業的形式呈現在大家的面前。
全球貿易的迅速發展使得大家對散貨的運輸需求變得越來越高。包括鐵礦石、煤炭和糧食等散貨的海運需求正日益呈現快速增長的態勢。而隨著遠洋散貨運輸船舶設備的不斷更新,大家對各類大型裝船機械中電氣系統的設計正提出越來越高的要求,這也是很多業內人士所關注的。
2 大型裝船機的主要結構
從結構上看,大型的裝船機主要是由懸臂皮帶、臂架回轉、臂架伸縮、大車行走機構、尾車、司機室、溜桶機構、潤滑系統、灑水系統等組成。包括其他類型的結構在內,其主要的構造如下圖1所示。
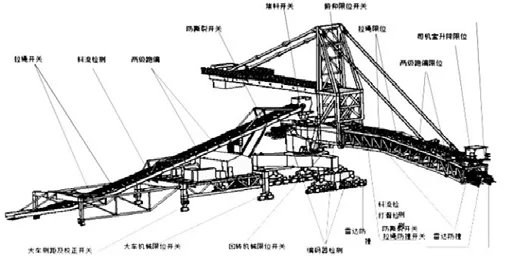
圖1 大型裝船機的主要結構
3 整體變頻驅動裝置的設計
整體裝船機主要是由臂架俯仰機構、臂架皮帶機構、大車行走機構和其他多種類型的機構組成。整個裝船機工作的核心機構被叫做臂架皮帶機機構。為了能夠讓所有的電動機都能夠在恒轉矩的模式下穩定運行,那么尤其需要采用變頻傳動裝置實現全面的控制。無論所輸送的物料類型如何,如果不進行連續輸送,那么勢必會對整個裝船機的工作效率產生較大的影響。如果設置速度傳感器對大車、俯仰、皮帶機等機構的運行速度、受力情況進行全面的分析,控制系統本身就能夠對裝船機系統全面地進行分析。最終再通過反饋的結果來對整機變頻器進行調節。整個過程中,一方面能夠全面地實現節能環保,另外一方面又能夠全面滿足裝船機產能的要求,在整體操作的過程中,也能夠對皮帶使用過程中的磨損情況進行全面的反饋。
4 主要功能和實現方式
從發展的情況來看,整體裝船機的操作方式主要包括遠程自動模式、司機室手動模式和無線遙控器手動模式3種。
(1)遠程自動模式。在中控室等自動模式下,所有的保護和連鎖系統都會在全自動的狀態下自動投入運行,而在之后如果能夠同裝船機有關的外部接口整體進行命名,那么也會在之后起到很好的作用。整個裝船機可以先通過接受中控室下達的指令,開始自動工作,先移動離開錨定位置,之后根據中控的工單移動到需要作業的船艙扣,臂架俯仰下降,到達指定的位置。
(2)司機室和手動的無線遙控器模式。這是整體裝船機最常用的操作模式,所有的保護和連鎖裝置都需要在整個過程中投入運行。在相應機構工作的時候,裝船機各機構的限位、傳感器等也會起到很重要的保護作用。一般的操作人員可以先對位于司機室聯動臺上的手柄、按鈕和選擇開關對整個裝船機進行操作,之后再運用RC(remote control)手柄實現對整個裝船機操作的目的。
(3)本地控制模式。這種模式與上面的中控室自動模式和手動無線遙控模式有著很本質的不同。本地控制模式主要可以被運用于整體設備的故障維修和試車過程中,最根本的是能夠將移動的設備運送到指定的位置。而在各種電機附近本身都設置有一個控制箱或者被稱作LCS(local control station)的按鈕盒,這樣的設備往往能夠實現對裝船機單獨機構的單獨控制。而在這種本地控制模式下,一般都只有對正在運行的機構本身能夠起到保護的功能,而其他連鎖機構將起不到很好的保護作用。
5 PLC控制系統的設計
對于整體大型裝船機電氣系統結構設計的過程來說,整個機械的控制是由PLC裝置來整體實現的。這個系統本身是由控制主站系統和若干個遠程站組成的。之后再通過Profibus DP的總線將存在于各個機構上的變頻器鏈接到主要的控制模塊上。之后再通過Profibs DP總線系統本身將各個操作臺和配電柜內部的I/O系統連接到主要的控制模塊。所有機構的總線形式一般是能夠更好地和各動力機構的力矩限制器和編碼器連接在一起的,并在這個過程中能夠全方位地傳達出包括皮帶速度、重量信號和幅度限制信號在內的各類信號。最終通過以太網將SMS和PLC模塊相連接,最終實現對裝船機運行狀態的全面監控,這樣即便機械在運轉的過程中遇到任何困難,那么也能夠在第一時間進行故障的診斷和控制。
6 電氣系統設計的關鍵部分
(1)針對ACB和MCCB進行注入電流測試。所有大型裝船機的電氣系統設備調試之前都要進行全面的保護測試,并在之后針對包括ACB和MCCB在內的內容通過采用專用的設備進行電流測試。最終的目的是為了充分證明斷路器的保護模塊能夠在系統過流時起到很好的作用。大家尤其需要在購買的過程中讓供應商提供相關的報告,以便全面確保其整體質量。
(2)重視電纜鋪設和計算。在電纜鋪設的過程中,必須嚴格按照GB和IEC標準來全面進行電纜鋪設。如果需要計算電纜,則需要嚴格按照AS3008的要求進行計算。之后要在計算的過程中充分考慮到包括鋪設方式、溫度系數和并列等因素。之后尤其需要在考慮到線纜降壓要求的基礎上充分滿足所有用戶的要求。通常也要充分考慮到插座和燈的回路和有關降壓的限制。
(3)對燈具進行安裝和照度的測試。如果需要在過道安裝燈具時,尤其需要安裝旋轉的燈桿,但一般燈桿的高度都被控制在2m左右。想要更好地控制燈具的照度,那么大家一定要嚴格按照相關技術規格書的要求來進行。遇到有需要交車和廠內試車的情況時,大家尤其需要通過運用專業的照度儀來對每個通道內部的內容進行測量。如果整體亮度不足時,則需要全面增加燈具,最根本的就是要保證整體通道中的亮度。
(4)吸附材料上的粉塵。在港口碼頭的作業現場一般的潮氣是非常重的,而也因為這樣,吸附在材料上的粉塵會隨著時間的推移而發生凝結,最終使得整個系統的吸收效果大打折扣。也因為這樣,必須使得整體吸附在材料上的粉塵能夠在最短時間內都落回到輸送線上,最后再通過裝船機上的皮帶和其他類型的螺旋輸送設備將其輸送到船艙的內部。而整個過程中采用的措施主要是:先通過理論計算來計算出吸附在材料上的最大吸塵量,之后再通過一次吹打的動作去除掉所有的粉塵量。尤其需要以電磁閥門的尺寸為基礎對整體開啟的時間做全面的計算,之后再根據高壓氣體單位時間內的變化和相鄰閥門的除塵效果來真正得到閥門間隔開啟的時間。
7 結語
在散貨裝船運輸的整個過程中,裝船機是其中的最后一級設備。而為了保證整個流程能夠更加順暢地進行,通常1條船的流程作業過程中只用1臺裝船機進行作業。因此,在之后設計的過程中,大家尤其要充分考慮到各種工況中的不利因素,之后再通過規避不利因素和采用可靠的元件和先進的技術,最終使得所有的產品都能夠可靠而安全地被操縱和運行。最后裝船機整體在自動化和維修方面都會有很大程度的提升。