主動聲納目標定位系統誤差修正方法?
2019-02-27 08:10:14趙向濤宛煜棋
艦船電子工程 2019年1期
關鍵詞:艦艇
趙向濤 宛煜棋 寇 祝
(1.海軍大連艦艇學院水武與防化系 大連 116018)(2.海軍大連艦艇學院學員五大隊 大連 116018)
1 引言
主動探測水下目標,可以獲得目標的舷角和距離信息[1~3],當水中目標速度較快時,聲速相對較慢,主動聲納探測目標回波的延遲時間相對較長,如4.5km發現快速目標,回波的時間延遲約為6s。當對高速魚雷目標進行仿真實驗,發現目前定位方法對高速魚雷定位誤差達到百米以上,無法滿足對高速魚雷實施“精確打擊”的目標[4~5]。故此,當采用主動聲納對于水下快速目標進行定位時,傳統探測定位方法獲得的目標方位距離的誤差較大,需要進行修正。
2 簡化修正方法
常用主動聲納屬于收發合置聲納[6],探測目標過程如圖1所示,t1時刻,艦艇與目標分別位于W1和T1點,艦艇聲納開始發射聲波;t2時刻聲波到達目標,艦艇與目標已分別運動到W2和T2點;t3時刻,當位于艦艇W3接收到目標的反射回波,目標運動到T3點。W1到T2的距離為d1,W3到T2的距離為d3。在W3點艦艇測得目標舷角qw,聲納聲波傳播距離為d1+d3,根據傳播時間間隔測量的目標距離為(d1+d3)/2。顯然,實際測得的目標距離和舷角值不匹配,必須進行修正[7]。
以艦艇和目標分別位于W2和T2點時刻為基準,對聲納的實測值進行修正。這樣,目標距離就是W2和T2點間的距離d*,即

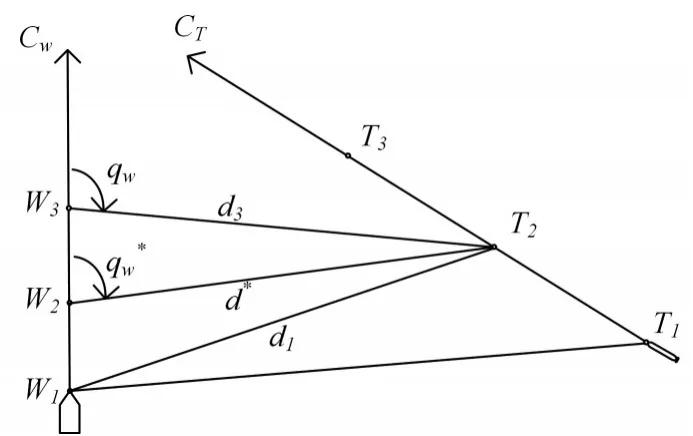
圖1 收發合置主動聲納定位示意圖

式中:Vw為艦艇速度;C為聲波在海水中的傳播速度。
3 橢圓修正方法
在相同的運動態勢下,由于艦艇發射聲波到接收的時間間隔Δt已知,則聲波傳播路程

聲速C已知,所以d1+d3已知。
設艦艇位置點W1、W3距離為dw,則

由于艦艇航速Vw已知,所以dw已知。
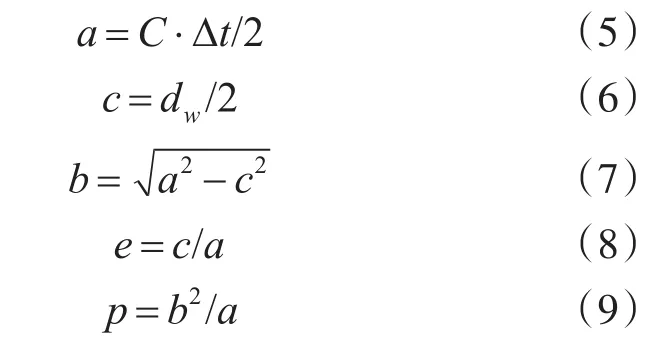
綜上所述,目標T2到W1、W3距離和已知,則T2位于W1、W3為焦點的橢圓上。其中W1、W3為焦點,距離dw,則焦距為dw,即dw=2c;d1+d3為橢圓上的點到焦點的距離和,等于橢圓長軸2a,即 d1+d3=2a,則短軸2b可由公式求得。橢圓長軸2a、短軸2b、焦距2c、離心率e、焦點參數 p參數確定如下:
以艦艇為中心,艦艏方向為極軸,以舷角qw為極角,距離d3為極徑的極坐標方程為
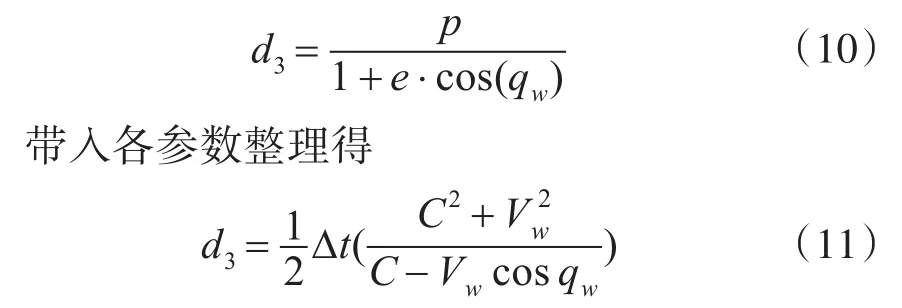
修正點W2到W3的距離dw23
由于修正參考點位于W2,所以t2時刻為基準時刻,接收到聲波t3時刻已知,則t2到t3時刻時間延遲為
4 橢圓修正方法收發分置聲納應用
采用收發分置聲納主動探測目標,以艦殼發射陣和拖曳接收陣共同完成探測[8~9]。主要的優點是,拖曳接收陣遠離艦艇,噪聲低,探測目標距離遠[10~12]。類似的收發分置聲納測量原理也存在原理誤差。與收發合置聲納測量原理誤差修正一樣,收發分置聲納也需要進行誤差修正。
收發分置探測過程如圖2,t1時刻我艦位于W1點(發射陣聲中心),拖曳接收陣位于S1點,與艦艇距離dst,目標位于T1點,發射聲波。聲波經過水中傳播,t2時刻到達目標,此時我艦、拖曳陣和分別位于W2、S2、T2點。聲波由目標反射,t3時刻返回接收陣,此時我艦、拖曳陣和位于W3、S3、T3點。
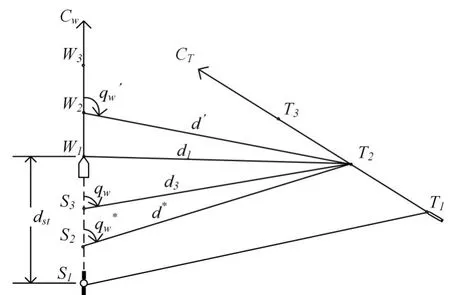
圖2 收發分置主動聲納定位示意圖
t3時刻接收陣位于S3點,測得聲波傳播時間間隔Δt,傳播距離d1+d3=CΔt,接收目標舷角qw,W1、S3距 離 為 W1S3=dst-Δt?Vw。 由 于d1+d3=C×Δt為定值,所以,以W1、S3為焦點,T2點為橢圓上的一點。以S2點為探測基準點修正測量數據。
以我艦航艦艏方向為0度,以舷角qw為極角,距離d3為距離的極坐標方程為
由于修正參考點為S2,所以t2時刻為基準時刻,t1時刻從聲波由W1點發出,到達T2點的時間間隔Δt1為聲波經過d1傳播時間

對于收發分置的主動聲納測量參數,即目標舷角和距離的修正,位置基準點發生了變化,時間發生了變化。所以應根據測量基準點、測量結果和測量時刻,進行相對位置的視差修正。
當以測量基準點S2進行修正后,相對于同一時刻我艦艇W2點,目標相對于艦艇的舷角qw'和距離d'為
5 仿真計算及結果分析
為突出問題的針對性,假設主動聲吶能夠準確測量回波方位和時間,并且不考慮其處理時間。設定聲速為1500m/s,水面艦艇航向000°.0、航速5m/s,高速目標初始距離4.5km。分析高速目標分別位于方位000°.0、045°.0、090°.0,速度從10m/s~100m/s和航向從000°.0~365°.0時,各修正方法所得目標位置與實際目標位置距離差。根據修正算法,修正后可以準確得到t2時刻,即回波抵達目標時艦艇和目標的位置,但修正后基準時刻有所改變,實際中需要的是t3時刻艦艇和目標位置,在此次仿真中簡單將修正后基準位置點平移至w3。其中,結果一為修正前目標位置和目標實際位置距離差,結果二為采用簡易修正法后目標位置和目標實際位置距離差,結果三為采用橢圓修正法后目標位置和目標實際位置距離差,結果四為收發分置聲吶采用橢圓修正法后目標位置和實際位置距離差。
當目標航向為330°.0不變,目標分別位于000°.0、045°.0、090°.0時,仿真結果如圖3。
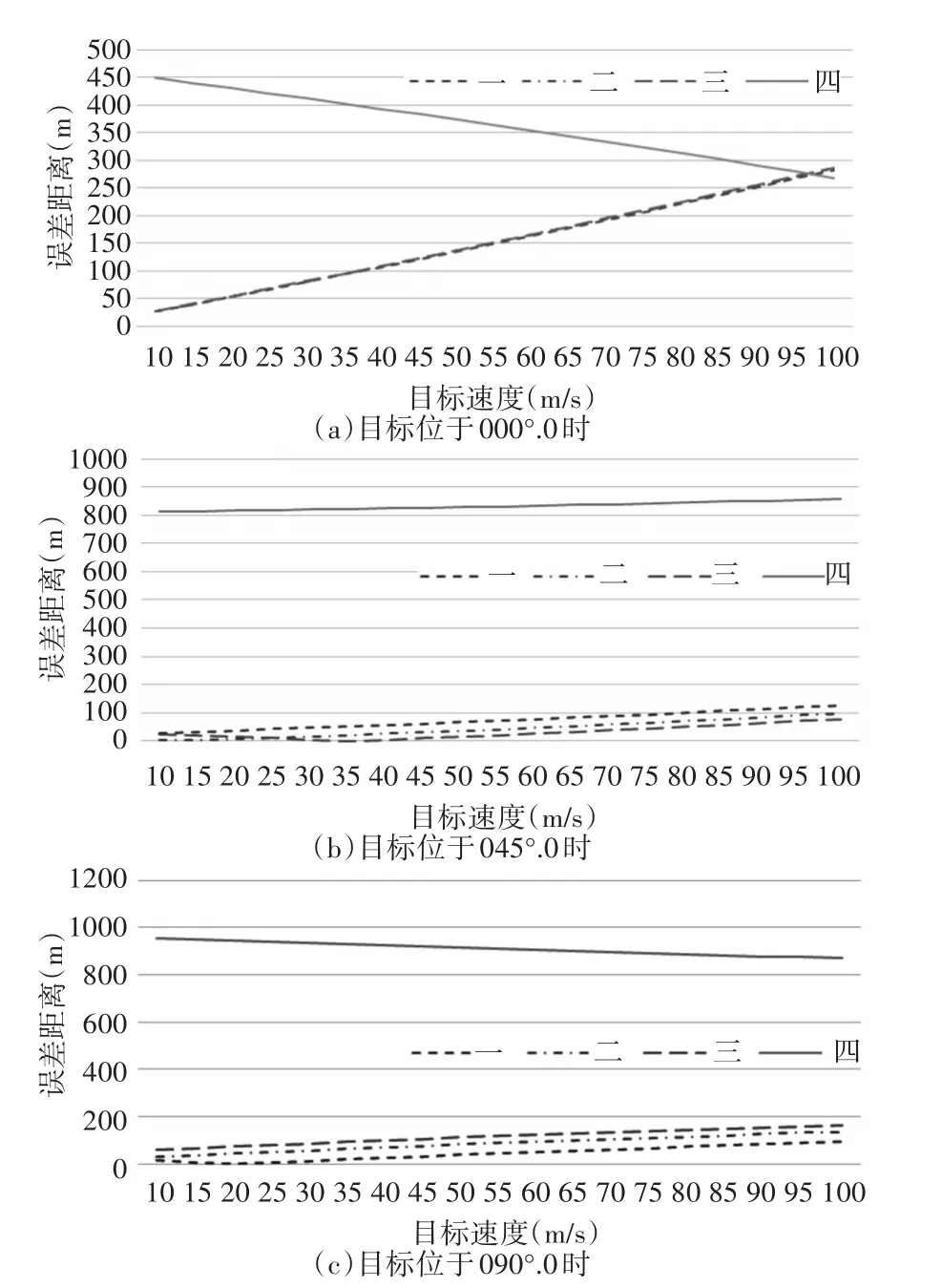
圖3 誤差與目標速度的關系
當目標速度為30m/s不變,目標分別位于000°.0、045°.0、090°.0時,仿真結果如圖4。
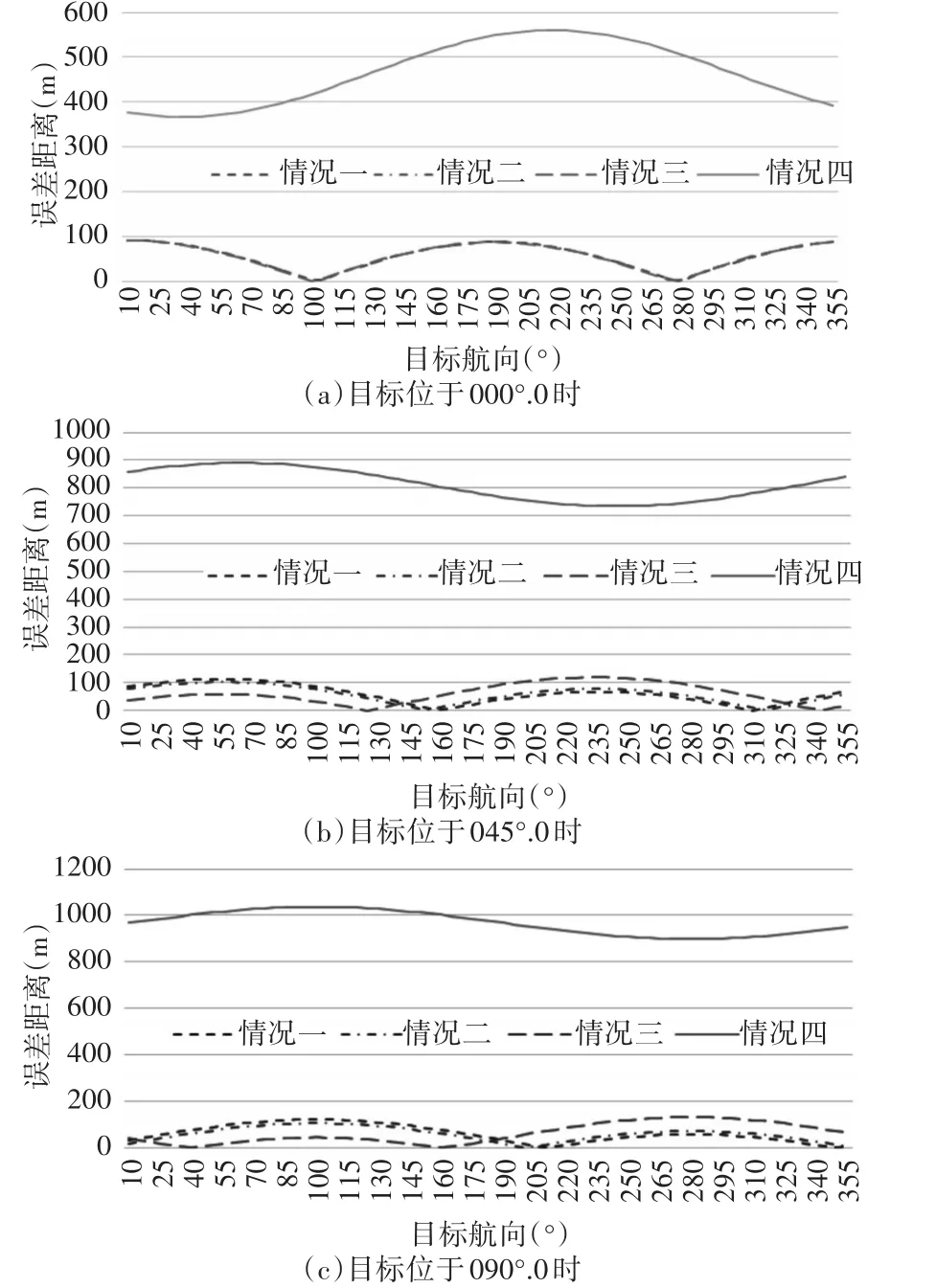
圖4 誤差與目標航向的關系
分析仿真結果可知,傳統目標定位測量方法與目標實際位置確實存在誤差,當目標速度為30m/s時,距離誤差為45m左右并隨著速度增大而增大,目標航向對距離誤差也有影響,當目標航向與艦艇航向垂直時距離誤差較小。同時,由仿真結果得,雖然修正方法可以準確得到艦艇和目標在t2時刻的位置,但簡單將基準時刻平移至t3時刻無法消除誤差,特別是收發分置系統距離誤差最小達到300m以上,無法滿足對魚雷精準定位的需求,需要使用濾波等手段進一步消除誤差。
6 結語
本文通過主動探測水下目標定位基本過程分析,指出傳統的目標定位測量方法確定的目標距離、舷角信息存在系統誤差的事實,在介紹了簡化修正方法的同時,提出了收發合置、收發分置主動聲納定位誤差修正方法并進行了理論推導,該方法可應用于水下高速目標探測定位應用中,對目標航向、航速等運動要素求解提供理論支持。
猜你喜歡
小學生學習指導(小軍迷聯盟)(2023年5期)2023-05-29 08:13:18
環球時報(2022-12-30)2022-12-30 15:15:00
軍事文摘(2022年13期)2022-08-27 01:26:26
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
艦船科學技術(2022年5期)2022-04-19 10:58:46
軍事文摘(2021年21期)2021-11-14 10:14:56
軍事文摘(2017年24期)2018-01-19 03:36:16
兵器知識(2017年10期)2017-10-19 19:31:38
軍事體育學報(2014年3期)2014-02-27 16:00:16
船海工程(2013年6期)2013-03-11 18:57:37