基于GA-灰色神經網絡的瀝青路面使用性能預測
2019-03-04 08:46:56陳仕周李冠男
重慶交通大學學報(自然科學版) 2019年2期
關鍵詞:模型
陳仕周, 李 山, 熊 峰, 李冠男
(1. 重慶交通大學 土木工程學院,重慶400074; 2. 重慶鵬方路面工程技術研究院,重慶400054)
0 引 言
路面使用性能預測是道路養護和路面管理系統的基礎,準確掌握路面使用性能變化情況可以確定路網中各路段的最佳預養護時機,以便維持路面高服務水平,有助于行車的舒適性、安全性及運輸的經濟性[1-2]。目前,國內外學者已提出多種形式的預測模型,主要分為概率型和確定型[3]。其中概率型模型是指預估路況指標某一時刻的狀態分布,主要建模方法有馬爾可法、半馬爾可夫法和殘存曲線法等;其優點是考慮了路況發展的隨機性,但由于是對狀態概率轉移矩陣進行預測,不如對路況指標預測直觀,且狀態轉移概率確定帶有一定主觀性。確定型模型是指預測路況某一項指標具體數值,主要建模方法有:力學法、力學-經驗法和經驗回歸法。由于我國路面使用性能歷史數據偏少,故采用傳統的經驗回歸法達不到理想預測精度,且難以反映環境因素與使用性能之間的復雜關系。
近年來,灰色理論廣泛應用于路面使用性能預測之中[4-7]。基于影響路面使用性能的因素具有不確性、復雜性和多樣性,且路面使用性能歷史數據較少,這恰好可通過灰色理論簡化分析,將眾多因素影響的路面使用性能作為因變量,時間變化作為自變量,通過時間序列去挖掘系統內部變化規律。其優點是建模所需數據少也能得到較高精度;但不難發現傳統灰色預測模型GM(1,1)仍然存在諸多問題,需進一步改進和提高,主要有以下幾點缺點:①離原始數據序列較近的預測值精度高,但對于中期長期預測效果不佳[8];② 當隨機因素擾動過大時,也不能反映系統的內部規律[9];③ 預測結果誤差不能反饋調節。張洪偉等[10]采用動態等維遞補GM(1,1)模型,不斷刪除老舊信息和添加新信息,保持原始數據序列維數不變,消除了不能中長期預測的限制,但有可能丟失有用信息,且仍沒有解決隨機因素擾動過大帶來的誤差及誤差反饋調節等問題。
綜上所述,筆者對傳統GM(1,1)模型采用兩種不同的改進方法。① 對傳統GM(1,1)模型參數進行無偏估計,消除傳統GM(1,1)模型對原始數據序列增長速度不能過快,預測長度不能過長的限制,建立了無偏GM(1,1)模型;② 將原始序列背景值采用滑動平均法處理,過濾隨機起伏過大值,凸顯原始序列的規律性,建立了滑動GM(1,1)模型。為充分利用各改進的GM(1,1)模型有效信息和調節單一預測模型預測誤差,引入了BP神經網絡[11],利用其強大的非線性映射能力來組合單一預測模型,既克服了組合預測合模型權重分配難題,又實現了誤差反饋調節。但學習效率較慢是BP神經網絡最大的不足,而且局部最優有較大出現概率[12]。而遺傳算法具有全局搜索能力強且搜索速度快的優點[13],能從總體上來優化BP神經網絡,從而建立GA-灰色神經組合預測模型。該模型結合了灰色理論、BP神經網絡以及遺傳算法優點,實現了對瀝青面使用性能的準確預測。
1 組合預測模型建模
1.1 建模思路
筆者利用遺傳算法優化后的BP神經網絡為載體,以傳統GM(1,1)模型、滑動GM(1,1)模型和無偏GM(1,1)模型對路面使用性能預測結果作為網絡的輸入項,同時將路面使用性能實際值作為網絡的輸出項,從而建立了GA-灰色神經網絡組合的瀝青路面使用性能預測模型,建模流程如圖1。
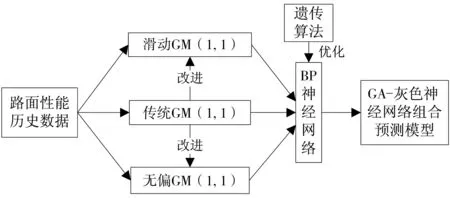
圖1 GA-灰色神經網絡組合預測模型的建模流程Fig. 1 Modeling process of GA-gray neural network combinedforecasting model
1.2 傳統GM(1,1)模型
給定原始序列為X(0)={x(0)(1),x(0)(2),L,x(0)(n)}。其中:x(0)(t)≥0, (t=1, 2, 3,L,n)。
2)對新的數據序列x(1)(t)建立白化微分方程,如式(1):
(1)

3)對累加生成的數據序列X(1)做均值生成矩陣B和向量Yn,即有式(2):
(2)
(3)
(4)
(5)
1.3 無偏GM(1,1)模型
無偏GM(1,1)模型是將傳統GM(1,1)模型的兩個參數a, u進行修正,降低了發展灰數|a|過大所帶來的誤差,同時也消除了傳統GM(1,1)模型對原始數據序列增長速度不能過快、預測長度不能過長的限制,應用范圍更廣。其建模步驟如下:
步驟1)~4)與傳統GM(1,1)模型建模步驟中的1)~4)相同。
5)計算GM(1,1)模型參數b和A,如式(6):
(6)
6)建立原始數據預測模型,如式(7):
(7)
1.4 基于滑動平均法改進的GM(1,1)模型
滑動平均法是為了消減原始數據異常值(如極值)的影響,在小區間上局部平均,強化原始數據序列的規律性,從而提高預測精度,處理原始數據的過程如下:
設原始數據序列為:X(0)={x(0)(1),x(0)(2),L,x(0)(n)};利用3點滑動平均法處理過后得到新數據序列為:X′(0)={x′(0)(1),x′(0)(2),L,x′(0)(n)};則計算表達式如式(8):
(8)
式中:t=1, 2, 3,L,n。
根據新數據序列按照傳統GM(1,1)模型的建模步驟得到滑動GM(1,1)模型。
1.5 灰色神經網絡組合預測模型
BP神經網絡是一種信號前向傳遞、誤差反向傳播的多層前饋神經網絡[14],網絡結構包括輸入層、若干中間隱含層和輸出層,這3個部分通過各層節點之間的連接權值w相互連接。其基本原理是采用梯度下降法,通過反向傳播不斷調整網絡的權值和閾值,使得網絡的誤差平方和最小。
傳統組合預測模型是按照一定規則把不同方法的預測結果組合起來,綜合利用各單個預測模型信息,并以適當的加權平均形式計算得出組合預測模型[15]。因此,科學分配單一預測模型權重是組合預測模型的關鍵之處。比如王昌橫等[16]采用熵權組合預測模型對瀝青路面使用性能進行了預測,其優點是賦權具有客觀性,但組合預測模型誤差不能反饋調節,所以不是最優組合預測模型。而BP神經網絡具有強大的非線性映射、自學習和自適應能力,故采用BP神經網絡來組合單一預測模型,可獲得更高精度。鑒于此,筆者通過BP神經網絡來組合傳統GM(1,1)模型以及改進的GM(1,1)模型,從而建立了灰色神經網絡組合預測模型,該模型既提高了輸入數據質量,又解決了如何科學分配權重難題,且還可反饋調節誤差,網絡結構如圖2。
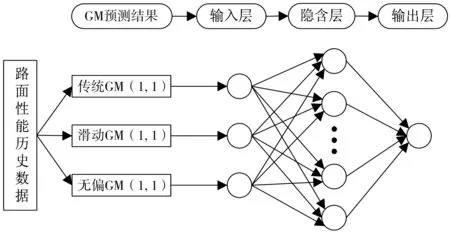
圖2 灰色神經網絡組合預測模型結構示意Fig. 2 Structure diagram of gray neural network combined forecasting model
其建模過程如下:
1)輸入層:通過傳統GM(1,1)模型、無偏GM(1,1)模型和基于滑動平均改進的GM(1,1)模型對路面使用性能原始數據進行預測,將得到的3組擬合值作為神經網絡的輸入變量。
2)隱含層:理論上已證明,3層神經網絡可實現任意復雜的非線性映射問題[17],因此采用僅含一個隱含層神經網絡,其結構如圖2,對于隱含層單元數目可參考式(9):
(9)
式中:p為隱含層節點個數;n為輸入層節點個數;m為輸出層節點個數;a為0~10之間常數。
3)輸出層:路面使用性能指標實測值作為輸出變量。
1.6 遺傳算法優化灰色神經網絡組合預測模型
遺傳算法(genetic algorithm, GA)是一種基于自然選擇原理和自然遺傳機制的尋優算法,模擬自然界中生命進化機制[18]。其實質是通過群體復制、交叉、變異等搜索技術,根據適者生存的原則逐代進化,最終得到最優解。
BP神經網絡由于初始權值和閾值是隨機初始化的,并且網絡訓練過程閾值和權值也在不斷地適應和改進,容易導致收斂速度較慢和網絡不穩定。此外,其誤差調整是基于梯度下降法,容易陷入局部最小值,從而影響預測精度。因此,筆者利用遺傳算法從全局來優化BP神經網絡的初始權值和閾值,既可克服神經網絡結構初始值選取不確定性,又能改善網絡收斂速度和收斂性能,防止訓練陷入局部最小值,提高網絡的穩定性和預測精度。遺傳算法優化灰色神經網絡權值和閾值過程如圖3。
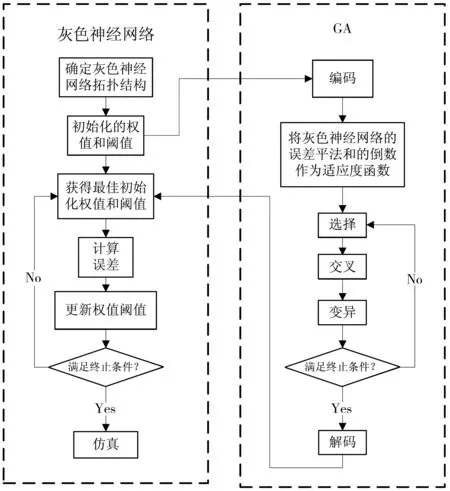
圖3 GA-灰色神經網絡組合模型流程Fig. 3 Flow chart of GA-gray neural network combined model
主要步驟如下:
1)確定網絡結構:與1.5節的灰色神經網絡組合模型拓撲結構一致。
2)編碼:按照灰色神經網絡常規方式隨機產生初始權值和閾值,然后根據網絡結構從左到右、從上往下順序進行編碼,編碼長度計算如式(10):
L=n×p+p×m+p+m
(10)
3)適應度函數值:對每一個輸入序列,將其分別賦給各層的權值和閾值,并計算網絡輸出誤差平方和SE,適應度函數值取SE的倒數,如式(11):
(11)

4)進化運算:采用輪盤賭法選擇算子,即根據編碼串個體適應度值高低,執行選擇、交叉、變異算子產生下一代種群。
5)判斷網絡訓練結束后SE能否滿足預期的要求,是則結束;否則轉入步驟3)繼續訓練。
6)將得出最佳初始參數賦給灰色神經網絡的權值和閾值,重新訓練得出預測結果。
2 應用實例
2.1 數據來源
以文獻[15]中某高速公路瀝青路面調查數據路面狀況指數PCI(見表1、2)為例,利用筆者所提出的5種模型分別對2000—2009年的路面狀況指數PCI進行仿真預測。其中:2000—2006年的PCI值作為建模數據,2007—2009年的PCI值作為檢驗模型預測精度。
2.2 誤差指標定義
(12)
(13)
(14)
2.3 參數設置
本次計算中,BP神經網絡經過多次反復調試,最終確定隱含層節點為6,輸入層節點為3,輸出層節點為1。隱含層神經元激活函數采用雙正切S形函數tansig,輸出層神經元的激活函數采用線性函數purelin,預測效果比較理想。輸入樣本采用mapminmax函數映射到[0,1],以適應激活函數的變化范圍。設置網絡的目標誤差為1E-3,最大訓練次數為1000,學習率0.1。遺傳算法參數:種群規模50,交叉概率0.6,變異概率0.08,進化代數100,并且根據網絡的拓撲結構確定個體編碼長度為31。其中:灰色神經網絡訓練過程見圖4(a);GA-灰色神經網絡訓練過程見圖4(b)。
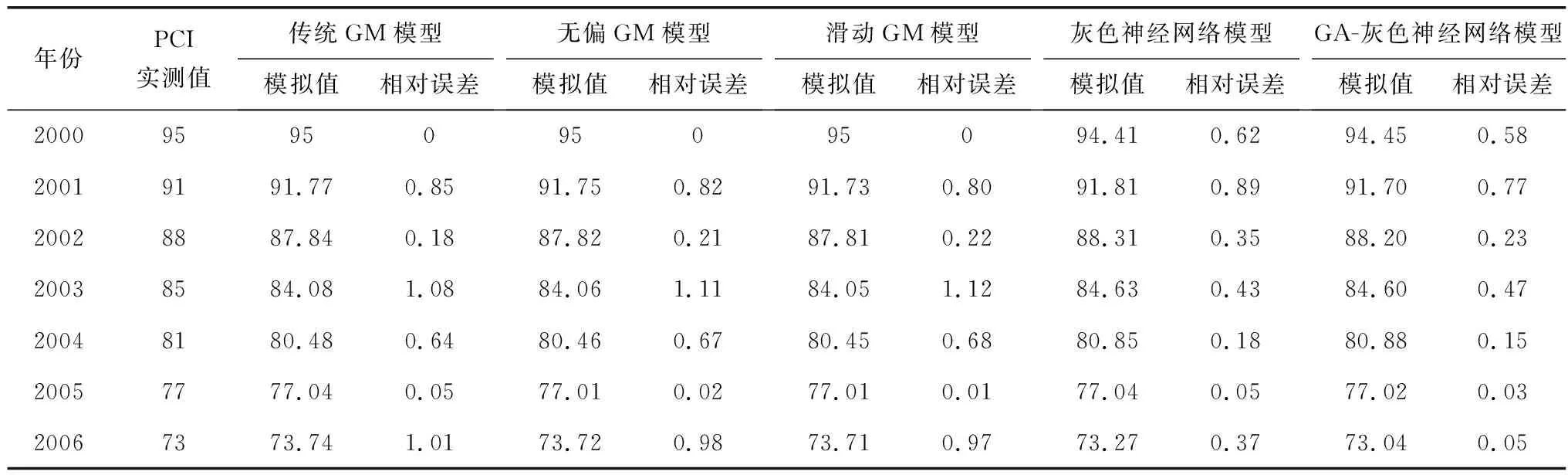
表1 路面狀況指數PCI實測值和5種方法的擬合值Table 1 Measured values of pavement condition index (PCI) and fitting values obtained by 5 kinds of methods

表2 路面狀況指數PCI實測值和5種方法的預測值Table 2 Measured values of pavement condition index (PCI) and forecasting values obtained by 5 kinds of methods

圖4 訓練過程Fig. 4 Training process
2.4 預測結果分析
選取2000—2006年的路面狀況指數PCI作為歷史數據,建立了傳統GM(1,1)模型和改進GM(1,1)模型。運用MATLAB編程計算,得到了3種GM(1,1)模型的預測方程。
傳統GM(1,1)模型如式(15):
(15)
無偏GM(1,1)模型如式(16):
(16)
滑動GM(1,1)模型如式(17):
(17)
令t=1~7,可得2000—2006年路面狀況指數PCI的擬合值,如表1;令t=8~10,可得2007—2009年路面狀況指數PCI的預測值,如表2。
將傳統GM(1,1)模型和改進GM(1,1)模型擬合值作為相同的訓練樣本,分別對所建立的灰色神經網絡模型和GA-灰色神經網絡模型進行訓練。并運用這兩種模型對2000—2006年路面狀況指數PCI進行擬合;對2007—2009年的PCI進行預測。
從表1可得出:路面狀況指數PCI采用單一GM(1,1)模型擬合值的平均相對誤差都比組合預測模型的誤差大。其中:傳統、無偏與滑動GM(1,1)模型平均相對誤差(MRE)都接近0.54%,灰色神經網絡模型和GA-灰色神經網絡模型的MRE分別為0.41%、0.32%。
從表2可得出:傳統GM(1,1)模型MRE為4.67%,無偏GM(1,1)模型MRE為4.64%,滑動GM(1,1)模型的MRE為4.63%。可見,改進的GM(1,1)模型比傳統的GM(1,1)模型的預測精度有所提高。而灰色神經網絡組合模型MRE為2.41%,GA-灰色神經網絡組合模型僅為0.54%。因此,采用GA-灰色神經網絡組合模型能夠準確地反映路面性能衰變情況,能夠為路面管理工作者制定養護計劃提供參考。
3 結 論
1)考慮了傳統GM(1,1)模型不足之處,在傳統GM(1,1)模型基礎上,提出兩種改進方法,并通過遺傳算法優化后的BP神經網絡對改進的GM(1,1)模型進行組合,該模型既克服了單一預測模型權重確定的難題,又兼顧灰色預測模型的小樣本特性、神經網絡的非線性和自學能力,以及遺傳算法全局搜索能力,修正了GM(1,1)模型的不能誤差反饋調節的缺點。
2)以路面狀況指數PCI為實例進行仿真分析,對比了5種預測模型的預測精度,結果表明:GM(1,1)模型和改進的GM(1,1)模型的MRE在4.6%左右,灰色神經網絡組合模型的MRE為2.41%,而GA-灰色神經網絡組合模型的MRE僅為0.54%,與真實值最接近。因此,GA-灰色神經網絡組合預測模型可廣泛用于路面使用性的預測,為路面管養單位提供科學的決策依據。
3)由于本實例的PCI值波動不是很大,所以滑動GM(1,1)模型的預測效果未能明顯體現,因此需要進一步驗證。此外,筆者提出的GA-灰色神經網絡組合預測模型,只利用較少數據PCI驗證它的有效性,其適用性還需要通過大量樣本數據以及其它路面使用性指標進行驗證。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
