基于兩次聚類的PWARX駕駛行為辨識模型
2019-03-04 08:57:26應海寧唐振民
重慶交通大學學報(自然科學版) 2019年2期
關鍵詞:模型
應海寧, 唐振民, 韓 旭
(1. 南京交通職業(yè)技術學院 電子信息工程學院,江蘇 南京 211188;2. 南京理工大學 計算機科學與工程學院,江蘇 南京 210094)
0 引 言
近年來,隨著機動車保有量急劇上升,機動車駕駛員的駕駛行為對交通安全和自然環(huán)境影響越發(fā)明顯[1]。駕駛行為建模是對駕駛狀態(tài)進行辨識、理解和預測的有力手段,已有很多學者對其展開了研究[2-4]。但駕駛行為會受駕駛員的駕駛習慣、駕駛狀態(tài)及交通狀況等多種因素的影響,因而目前為其建立高精度辨識模型還存在很多困難[5-6]。S.D.KEEN等[7]和P.ANGKITITRAKUL等[8]分別采用結構簡單、運算方便的線性控制器建立了駕駛行為模型;但該類方法在建模精度方面不夠理想。神經(jīng)網(wǎng)絡、隱馬爾科夫等非線性模型以其良好非線性模型逼近能力在駕駛行為建模領域得到了廣泛應用[9-10]。學者們發(fā)現(xiàn)駕駛行為在邏輯上可抽象為由駕駛決策過程和駕駛控制過程兩部分組成;前者可用各個由離散事件驅(qū)動的分段模式來描述;后者則可由各個分段子模式中的連續(xù)時變系統(tǒng)來表征[11-13]。也就是說,駕駛行為模型實際上可看為是一個由離散子系統(tǒng)和時變連續(xù)性子系統(tǒng)組成的混雜系統(tǒng)(hybrid system,HS)。
迄今,學者們提出了很多針對HS駕駛行為的建模算法。J.H.KIM等[14]提出了分段線性和混合整數(shù)建模的MILP(mixed integer linear programming)算法;但該算法只討論了避免碰撞駕駛行為的建模問題。S.SEKIZAWA等[15]將隱馬爾可夫模型(hidden markovmodel, HMM)嵌入到自回歸各態(tài)歷經(jīng)模型(auto regressive exogenous,ARX)中的各個離散狀態(tài)模型中;該算法依據(jù)模型轉移概率實現(xiàn)了各固定子狀態(tài)模型間的切換,但沒有考慮整個系統(tǒng)的擬合精度。T.AKITA等[16]提出了一種分段仿射自回歸各態(tài)歷經(jīng)算法(piecewise auto regressive exogenous, PWARX),用于對跟車行駛狀態(tài)進行建模。R.TERADA等[17]提出使用分層策略對駕駛行為HS模型中潛在層次結構進行分析,在各分層空間上再進行分段ARX建模;但該算法對駕駛行為層次分割較為主觀,難以保證其具有較好的泛化能力;此外,當子模型之間存在重疊時,PWARX模型辨識精度會受到較大干擾。
基于聚類算法的PWARX模型在HS建模領域得到了廣泛應用。該類算法基本思路是通過聚類算法對子模型區(qū)域進行無監(jiān)督劃分,然后在各個子空間上再進行PWA建模。于玲[18]提出了一種基于聚類技術,并融合搜索、模式分類和線性系統(tǒng)辨識的PWARX算法(C-PWARX);該算法不需要預先知道子模型數(shù)量,但其搜索子模型區(qū)域邊界過程的計算復雜度較高。潘天紅等[19]利用改進的模糊聚類算法(GK-PWARX),克服聚類迭代過程出現(xiàn)的非數(shù)值解問題,先以綜合性能指標最優(yōu)確定最佳的子模型個數(shù),再利用支持向量機構造出一個標準的二次規(guī)劃問題,得到凸多面體的方程系數(shù);該方法的建模精度依賴于模糊隸屬度合理性。Z.LASSOUED等[20]提出了一種能同時對子模型空間分界面參數(shù)和自身參數(shù)進行估計的PWARX建模算法(T-PWARX),該算法結合了聚類、線性模型辨識和模式識別技術,降低了異常點對建模過程的干擾;但在缺少先驗知識場合的應用效果還不夠理想;為克服對先驗知識的依賴,以及非線性準則對目標函數(shù)無法確保始終收斂于極小值。Z.LASSOUED等[21]又接著提出了一種基于聚類的PWARX建模算法(DBS-PWARX),但該算法難以高效處理凸多面體區(qū)域的劃分問題。受制于聚類算法本身局限性,上述方法普遍存在對子模型區(qū)域劃分需要依賴一定的先驗知識,且需要經(jīng)過多次迭代搜索和調(diào)整才能獲得較為準確的凸多面體方程。
針對上述存在的不足,筆者提出了一種融合近鄰傳播聚類(affinity propagation, AP)和K-means聚類的PWARX模型辨識算法(AK-PWARX),用于對駕駛行為進行建模。該模型綜合兩種聚類算法的特點,可在沒有先驗知識的情況下對PWA子模型區(qū)域進行合理劃分,以準確獲取各個駕駛行為子模型對應的狀態(tài)樣本子空間,有利于提高整個駕駛行為模型的辨識精度。模型時間復雜度只與樣本點數(shù)量和維度相關,在低維度空間上具有較好地駕駛行為在線辨識實時性能。
1 基礎理論
1.1 PWARX辨識算法
PWARX是一種由有限個仿射子模型集成的特殊非線性模型,根據(jù)給出的切換律能以任意精度逼近各種連續(xù)、光滑、非連續(xù)、非光滑的混雜系統(tǒng)。PWA系統(tǒng)模型如式(1)、(2):
y(k)=fpwarx(rk)+ek
(1)
(2)
在模型結構已經(jīng)明確的條件下,PWARX模型辨識的基本任務是對參數(shù)θi、hij和Ss進行求解。這3種參數(shù)之間存在高度耦合,目前尚無明確解法,一般采用搜索迭代等方法來估計。
1.2 AP聚類
AP是一種通過近鄰樣本之間的信息迭代傳播來實現(xiàn)聚類的方法。其特點是不需要事先指定聚類數(shù)量,因而具有很好的自適應性。AP算法以樣本的相似度矩陣S=[sij]為輸入,s(i,j)=-║xi-xj║,i≠j,║·║為歐式距離。樣本間傳播的消息分為吸引度r(i,k)和歸屬度a(i,k)兩種。其中:r(i,k)用于度量樣本k能夠吸引樣本i為其聚類成員的程度;a(i,k)用于度量樣本i將樣本k作為其所屬聚類中心的適合程度。在迭代過程中,r(i,k)和a(i,k)按式(3)、(4)不斷更新。
r(i,k)=s(i,j)-maxk≠k′[a(i,k′)+s(i,k′)]
(3)
(4)
通過阻尼系數(shù)λ可調(diào)整r(i,k)和a(i,k)的更新幅度,方法如式(5):
Mt+1=(1-λ)Mt+λMt-1
(5)
式中:M為以r(i,k)和a(i,k)為元素的矩陣。
當吸引度和歸屬度不再變化時,由式(6)可得聚類結果。
arg max[r(i,k)+a(i,k)]
(6)
1.3 K-means聚類
K-means算法認為同一個簇內(nèi)的樣本之間具有較近距離,其算法過程如下:
1)選取若干個初始聚類中心;
2)根據(jù)剩余樣本到質(zhì)心的距離將其歸到與質(zhì)心最近的類中;
3)重新計算已知各個聚類的質(zhì)心;
4)迭代2)~3)步直至滿足停止條件。
初始類聚類中心點(質(zhì)心)對K-means算法最終的聚類結果有重要影響。
2 AK-PWARX建模算法
表征駕駛行為特征的參數(shù)主要包括車輛本身的行駛狀態(tài)數(shù)據(jù)和車輛行駛環(huán)境的狀態(tài)數(shù)據(jù)兩類。前者一般通過自診斷系統(tǒng)(on-board diagnostic,OBD)接口即可直接獲取,在應用上具有方便、代價低等優(yōu)點;后者則需要借助各類雷達、攝像頭等裝置才能獲得,其雖能明顯提高對行駛環(huán)境的解釋力,但應用成本和經(jīng)濟成本較高。因此目前已經(jīng)市場化的駕駛行為辨識系統(tǒng)(如美國Progressive公司的Snapshot等)主要基于前者進行分析。鑒于此,筆者選擇基于車輛自身行駛參數(shù)對駕駛行為進行建模。
2.1 輸入輸出參數(shù)
駕駛行為安全性評價指標有多種,筆者只考慮高速轉彎和急加減速這兩種駕駛行為對車輛行駛安全性的影響。由于駕駛行為狀態(tài)在時域上是一種有序列,對其狀態(tài)特征參數(shù)的在線提取一般是在滑動窗內(nèi)進行的。筆者在長度為LW個樣本點的時間窗內(nèi)對轉向特征值和加減速特征值參數(shù)進行提取,如式(7):
(7)

算法的輸出參數(shù)為駕駛行為危險系數(shù)為coe,coe∈[0, 1];coe值越大表示危險程度越高;coe<0.5表示駕駛行為正常,coe>0.5表示駕駛行為危險。
2.2 建模原理
由于車輛實際駕駛行為會受到多種因素的影響,即使同一個駕駛員在相同交通環(huán)境下也會具有不同的駕駛行為。因此要獲得明確的子狀態(tài)數(shù)量及其清晰的區(qū)域分割較為困難。而PWARX模型參數(shù)求解問題最主要的難點就是關于參數(shù)S的確定,這就會導致難以獲得合理的Ri分布和hij。
筆者提出基于兩次聚類的PWARX模型辨識算法(AK-PWARX),利用AP算法能夠自適應挖掘樣本空間結構優(yōu)點,并結合K-means聚類來獲得更為合理的駕駛行為狀態(tài)多面體樣本空間劃分。

(8)
式中:φi=[ri(1),…,ri(Ni)]T為第i個聚類中Ni個回歸系數(shù)。

第4步:求解LDi上的多面體劃分Ri。設多面體劃分的超平面方程如式(9):
hi={airk+bi=0}
(9)
構造其代價函數(shù)如式(10):
(10)
式中:Pi為回歸向量rk屬于Ri空間的正確概率;ρ為懲罰因子;μi為概率因子。
式(10)則變?yōu)槎蝺?yōu)化問題,采用積極集二次規(guī)劃算法對(ai,bi)進行求解。
(11)
2.3 算法有效性分析
為評估AK-PWARX模型對駕駛行為在線鑒別的實際意義,需要從理論有效性和時間復雜度兩個方面去分析其有效性。
2.3.1 理論有效性
鑒于AP和K-means聚類算法的理論有效性已經(jīng)得到證明,因此AK-PWARX算法的理論有效性主要取決于多面體區(qū)域劃分Ri的有效性。
則有式(12):
(12)

由此可得,筆者所提的PWARX模型的多面體區(qū)域分割算法是正確的,這從理論上保證了該算法對任意復雜駕駛行為模型都可獲得有效的子模型狀態(tài)空間,以提高駕駛行為模型的辨識精度。
2.3.2 時間復雜度
設AK-PWARX模型一次需處理的k維樣本點數(shù)量為N。由于AP算法和K-means算法的時間復雜度為O(kN2)。積極集算法的時間復雜度為O(k2N2),梯度下降法時間復雜度為O(Nk)。因此,AK-PWARX算法的時間復雜度為O(k2N2)。
3 實 驗
3.1 仿真實驗
由式(13)定義一個包含3個子模型的PWARX駕駛行為仿真模型,其每個子模型分別對應勻速行駛、急加速和急轉向3種正常駕駛行為。
(13)
式中:rk=Uk-1。
該模型共生成了150個駕駛行為的特征樣本,每個樣本點是一個由u1和u2組成的二維特征向量。整個樣本集在歸一化后的空間分布如圖1。

圖1 人工樣本分布Fig. 1 The distribution of artificial samples
AK-PWARX算法在圖1中樣本集上的運行過程如下:
1)通過AP算法在樣本集上進行聚類,其結果如圖2;
2)在各個類簇上進行PWA線性建模,其擬合結果如圖3;
3)使用K-means算法在各類簇模型的參數(shù)空間上進行聚類,獲得各個子數(shù)據(jù)集的LDi(圖4),可見K-means算法得到了3個類簇(每個橢圓表示一類),意味著存在3個不同的PWA子模型;
4)在各個數(shù)據(jù)集LDi上求解相應的PWA子模型,結果如圖5。
由此可看出,整個樣本集被準確分成了3個區(qū)域,通過在每個區(qū)域上對PWA子模型進行求解,得到了最終的PWARX模型。

圖2 AP聚類結果Fig. 2 AP clustering results
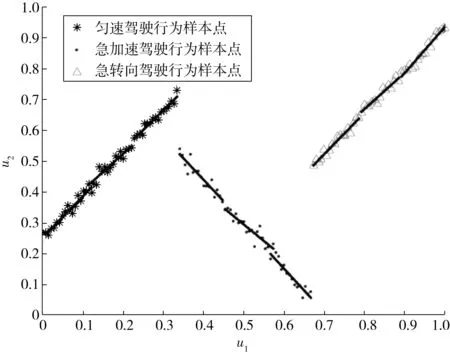
圖3 各類簇上的PWA子模型Fig. 3 PWA sub-models for clusters
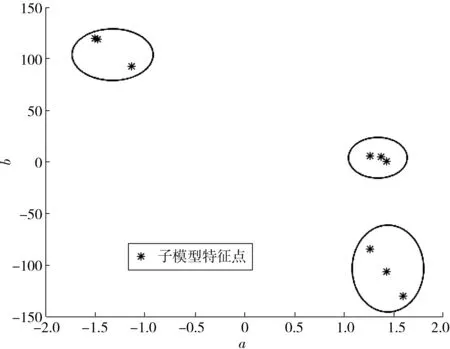
圖4 數(shù)據(jù)集LDi的結構分布Fig. 4 The structure distribution of data sets LDi
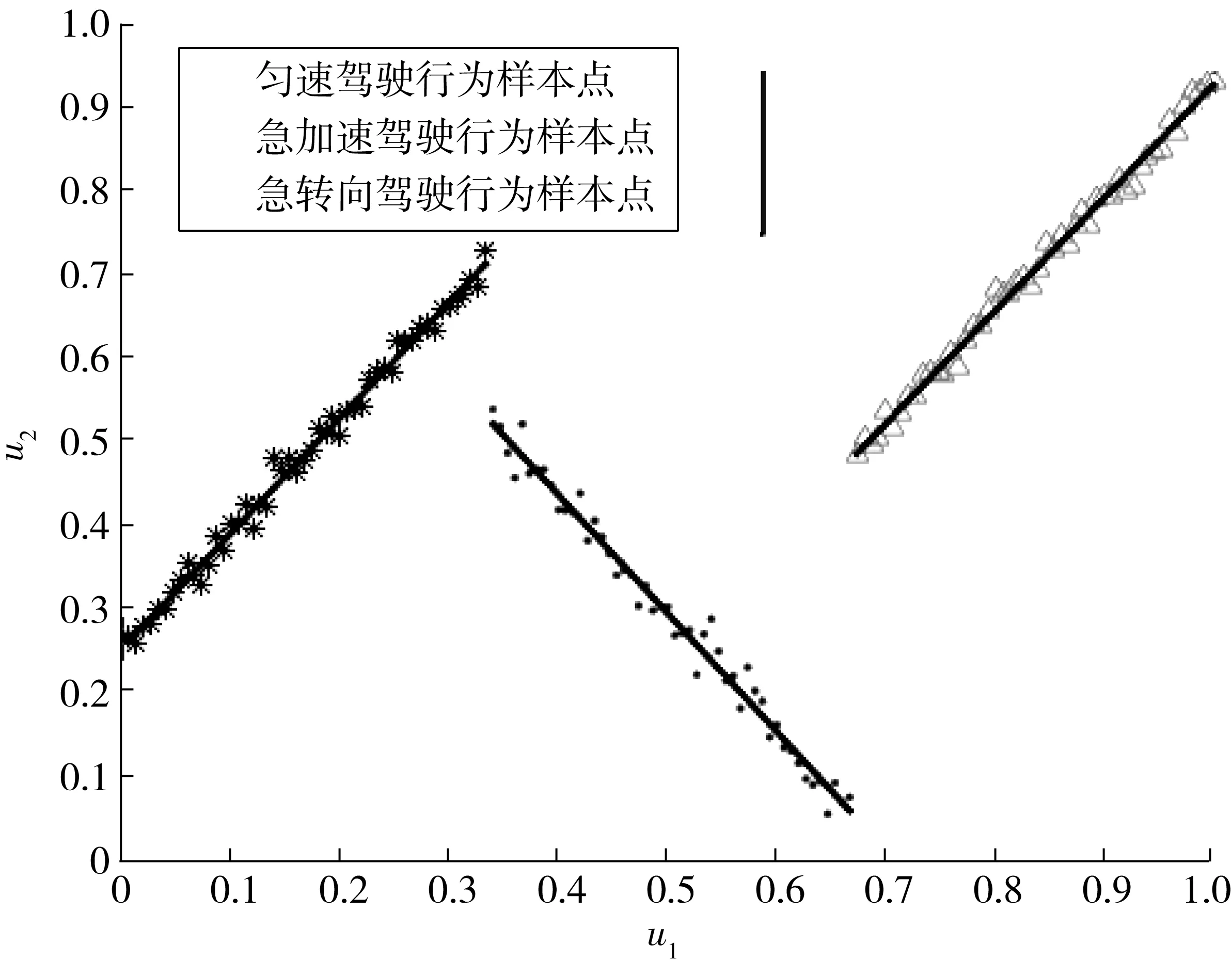
圖5 PWARX模型求解結果Fig. 5 Solution results of PWARX model
3.2 真實實驗
3.2.1 實驗環(huán)境設置
實驗車輛采用長安福特2014款翼虎車輛,所需采集參數(shù)細節(jié)如表1。

表1 駕駛行為原始數(shù)據(jù)類型Table 1 Original data type of driving behavior
數(shù)據(jù)采集設備為飛思卡爾i.MX6Q單片機,該處理器集成了Flexcan模塊接口,通過直接訪問OBD接口中的CAN總線(數(shù)據(jù)采樣頻率為5 Hz),可實時解析表1中的車輛行駛原始數(shù)據(jù);通過3G通信模塊可將數(shù)據(jù)遠程傳輸給服務器;在服務器端通過后臺數(shù)據(jù)處理實現(xiàn)駕駛行為模式辨識。為便于對建模算法的性能進行驗證,筆者將所采集的駕駛行為數(shù)據(jù)在MATLAB2010平臺中進行分析處理。車輛數(shù)據(jù)采集環(huán)境如圖6。

圖6 數(shù)據(jù)采集環(huán)境Fig. 6 The environment of data sampling
由于各類突發(fā)交通行為(如擁堵、車輛不按交通信號行駛等)對個體的駕駛行為影響較大,所以筆者只關注在正常交通通暢且沒有其余車輛干擾狀態(tài)下的駕駛行為辨識問題。考慮到實際駕駛行為的危險程度在定義上具有一定模糊性,根據(jù)福特翼虎車輛物理特性和相關技術[22-23],筆者將車輛急減速大于1.5 g,側加速度大于0.5 g時的駕駛行為定性為危險駕駛(coe>0.5)。
筆者對10位駕駛員在南京交通職業(yè)技術學院駕訓場地內(nèi)某相同路段(包含220 m直道、2個直角彎道和30 m的“8”字形彎道)上的駕駛行為進行建模和辨識。車輛行駛狀態(tài)數(shù)據(jù)分別在正常駕駛行為和危險駕駛行為狀態(tài)下進行采集。根據(jù)駕駛員駕駛行為差異和數(shù)據(jù)采樣設備的采樣率等因素,根據(jù)駕駛行為樣本的采集方法[24],本實驗共采集了450組駕駛行為參數(shù)樣本,每組樣本包含1 000個樣本點,具體如表2。

表2 駕駛行為原始數(shù)據(jù)Table 2 Original data of driving behavior
圖7為某組危險駕駛狀態(tài)下的車輛行駛原始數(shù)據(jù)樣本。圖8為3種原始參數(shù)計算所得的u1和u2值(LW=10)。

圖7 危險駕駛行為原始數(shù)據(jù)樣本Fig. 7 Original data samples of dangerous driving behavior
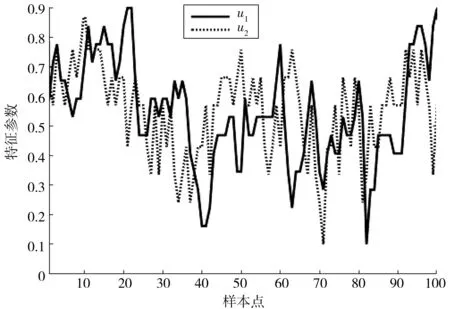
圖8 某組駕駛數(shù)據(jù)樣本的特征參數(shù)Fig. 8 Characteristic parameters of a group of driving data samples
3.2.2 實驗結果
駕駛行為模型可被看成是由隨機事件驅(qū)動。根據(jù)均值理論,將訓練所得的PWARX模型參數(shù)均值直接作為測試用PWARX模型參數(shù)是合理。筆者在450組駕駛行為參數(shù)樣本上,采用5折交叉驗證法對AK-PWARX平均建模精度進行統(tǒng)計。圖9為任意選取的10組由PWARX模型參數(shù)u1、u2和coe構成的向量在三維空間上分布。
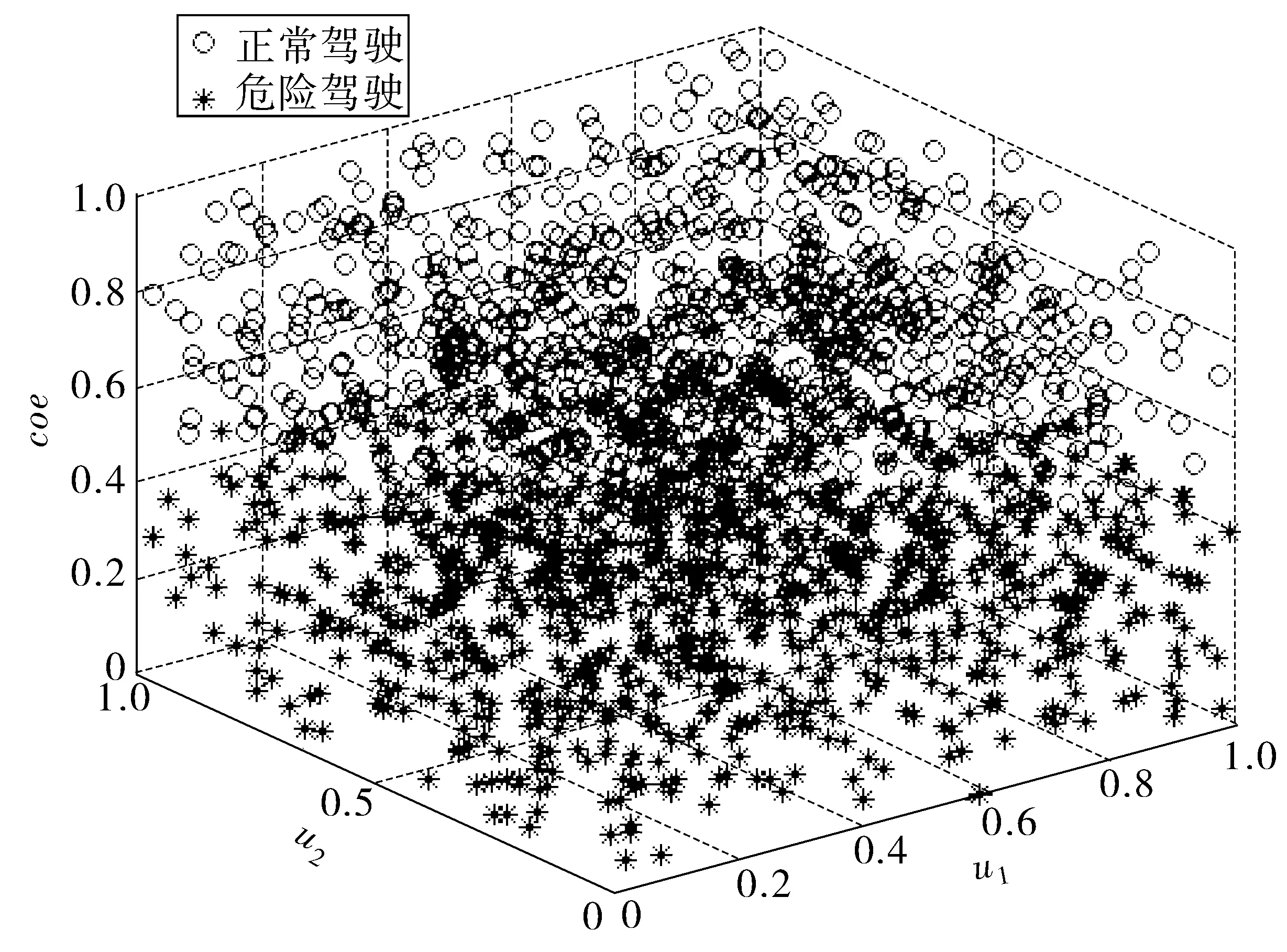
圖9 某組樣本的PWARX模型參數(shù)分布Fig. 9 Parameter distribution of PWARX model for a set of samples
為了驗證AK-PWARX算法性能,筆者在相同實驗環(huán)境下與C-PWARX、GK-PWARX、T-PWARX和DBS-PWARX算法建模精度進行比較,具體結果如表3。
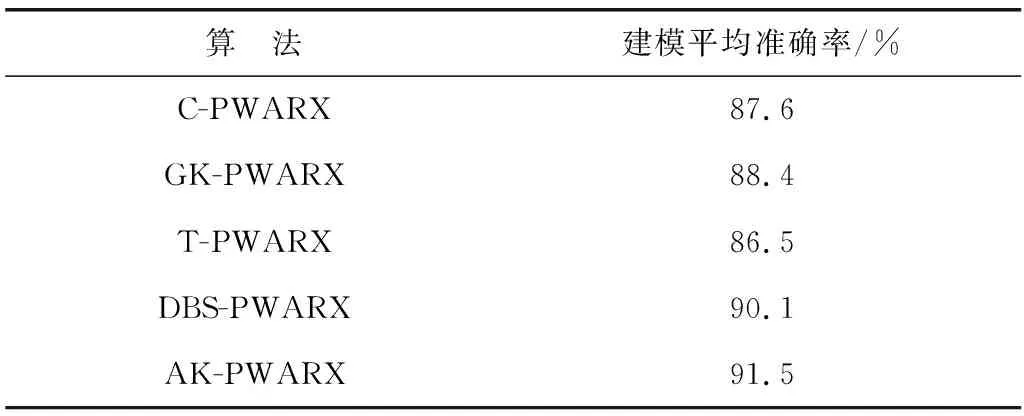
表3 各算法的駕駛行為建模精度Table 3 Accuracy of driving behavior modeling based on various algorithms
由表3可看到,AK-PWA算法對駕駛行為的建模平均準確率要高于其他模型,取得了較好效果。
4 結 語
筆者提出了一種基于AP聚類和K-means聚類的PWARX模型(AK-PWARX),用于對駕駛行為進行辨識。該模型先后在樣本和參數(shù)空間上兩次調(diào)用聚類算法,利用兩種聚類算法各自技術特點,在沒有先驗知識情況下對PWA子模型區(qū)間進行高質(zhì)量劃分;并在其基礎上通過梯度下降法對PWA模型參數(shù)進行求解。使用OBD接口數(shù)據(jù)采集設備對由10個駕駛員產(chǎn)生車輛駕駛數(shù)據(jù)進行采集,在該數(shù)據(jù)集上用AK-PWARX算法進行建模,取得了91.5%的精度。
但是筆者采用數(shù)據(jù)集只涉及到了車輛本身行駛狀態(tài),而沒有考慮車輛環(huán)境行駛狀態(tài)。因此,隨著車輛行駛環(huán)境感知設備成本的下降,有必要研究如何融合車輛行駛環(huán)境數(shù)據(jù)來進一步提高駕駛行為的建模精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
