考慮噪聲抑制的風力機模擬器的設計與實現
2019-03-06 09:22:38徐洋超劉尚孟陳駿杰俞小虎詹加華
浙江電力 2019年2期
關鍵詞:機械
徐洋超,劉尚孟,陳駿杰,俞小虎,詹加華
(1.國網浙江省電力有限公司紹興供電公司,浙江 紹興 312000;2.國網浙江省電力有限公司溫州供電公司,浙江 溫州 325000)
0 引言
WTS(風力機模擬器)作為實際風力機的實驗替代設備,能在實驗室環境下構建并進行風力機特性的模擬,簡化風力機功率控制策略、并網控制策略、機械設備的故障分析以及風電系統及部件的開發測試等內容的研究。
目前,WTS根據本身的模型設計和風電系統中的研究對象大致分為3種:第1種WTS主要研究風電系統的并網變流和風力機的電磁部分,著重關注并網接入問題和風力機的電磁動態[1]。第2種WTS關注的重點在于故障模擬和狀態監測[2-3]。第3種WTS主要服務于風力機伺服控制實驗,驗證不同湍流風速下設計的控制算法的有效性。本文研究的是第3種WTS[4-11]。
由于實驗室環境下WTS的轉動慣量較小,導致模擬結果同實際風力機的機械動態相差甚遠,因此需通過縮放比例方式和慣量補償策略使WTS達到實際風力機轉動慣量的數量級,完成以小轉動慣量模擬大型風電機組的風機機械動態[4]。
通過PWM(脈寬調制)技術對電機進行調速控制在實際工業現場中需要旋轉編碼器的配合,而旋轉編碼器一般利用光電轉換將軸系的角位移等機械量轉換成數字量(電脈沖)完成測速[12-13],而使用編碼器測速不可避免地會產生噪聲。
本文通過實驗分析,發現傳動鏈轉速經微分運算后會放大噪聲,進而影響WTS機械動態模擬的準確性。在此基礎上,本文設計了考慮噪聲抑制的改進策略,運用加速度觀測器的方式獲取傳動鏈轉速的加速度,最后經實驗驗證了改進后的WTS對轉速具有良好的噪聲抑制作用。
1 風力機模擬器的數學模型
1.1 風力機模擬器結構
如圖1所示,WTS主要分為3個部分:
(1)發電并網系統。其主要設備包括發電機和變流器。該部分的電氣結構與實際系統完全相同,可以真實反應風電并網的過程。
(2)實時數字模擬系統。其主要設備為PLC(可編程邏輯控制器),具有提供風速數值、計算風輪氣動轉矩與發電機電磁轉矩等功能。該系統可實現風力機氣動特性模擬、機械動態模擬和主控策略模擬和驗證等[14]。
(3)風輪模擬系統。其主要設備包括變流器、電動機和機械飛輪。變流器在接收實時數字模擬系統輸出的轉矩指令后,模擬風力機的氣動特性,對電動機進行轉矩控制[15]。機械飛輪則補償一部分轉動慣量。
風輪氣動轉矩Ta的計算公式如下:

式中:ρ為空氣密度;R為風輪半徑;v為風速;ωt為風輪角速度;Cp為風能利用系數,是與葉尖速比λ有關的函數。
1.2 風力機模擬器轉動慣量補償策略
實際的風力機傳動鏈模型如圖2所示,在忽略摩擦阻尼的情況下,傳動鏈的機械動態過程可表示為:
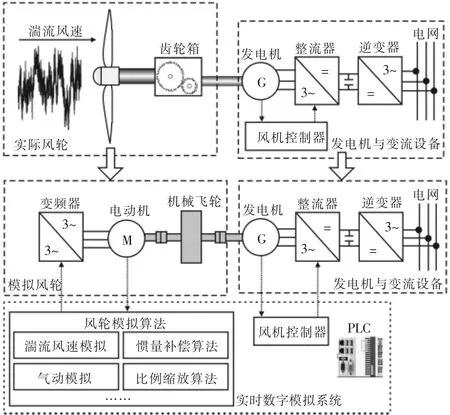
圖1 風電系統與風力機模擬器的比較
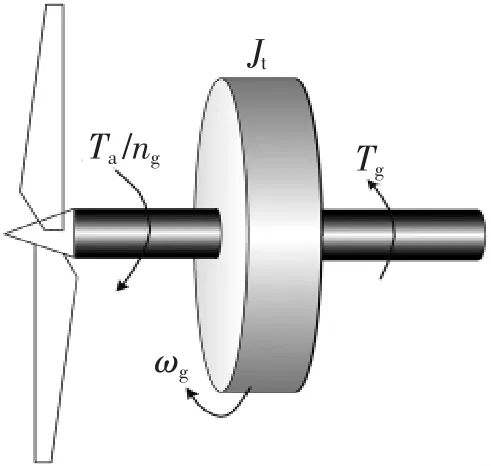
圖2 風力機的傳動鏈模型

式中:Jt為整個傳動鏈(折算至高速側)的轉動慣量;ng為齒輪箱變比;ωg為發電機的轉速;Tg為電磁轉矩。
WTS的傳動鏈機械動態在忽略阻尼的情況下可表示如下:

式中:Ts為WTS電動機提供的轉矩(即模擬實際的風輪氣動轉矩);Js為WTS整個傳動鏈的轉動慣量;ωs為WTS傳動鏈轉速;Tgs為WTS發電機的電磁轉矩。
考慮到實際風機容量大于WTS,可先將實際風機按一定比例系數縮小至與WTS相同容量,即式(3)等號兩邊同時縮小ns倍,得到:

縮小后仍應與WTS有一致的機械動態,即ωs=ωg。同時兩者的發電機電磁轉矩也應相同,即Tg/ns=Tgs。 由式(4)和式(5)可得:
式(6)即為WTS模擬機械動態時所需的電動機轉矩。等式右側第一部分為實際風力機按比例縮小的氣動轉矩,第二部分為轉矩的動態補償量。
WTS的原理結構如圖3所示,若Ts按式(6)進行氣動轉矩輸出,則WTS傳動軸轉速與實際轉速相同,即實現了機械動態模擬[15]。
2 轉速噪聲對傳動鏈模擬的影響
由于WTS系統利用旋轉編碼器實現測速,故傳動鏈的轉速信號中便存在噪聲。同時,WTS的控制系統以PLC為基礎,表明WTS的控制系統本質上是一個離散系統(數字系統),因此需要將WTS的傳動鏈數學模型進行離散化處理。
將式(6)兩邊乘以ns,還原傳動鏈補償模型后為[15]:

傳動鏈離散模型如圖4所示。
根據WTS傳動鏈的離散模型,理想情況下,補償轉矩Tcomp可表示為:
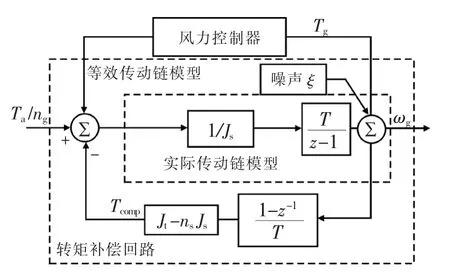
圖4 WTS傳動鏈離散數學模型

式中,T為采樣周期。
由于實際系統中測量轉速噪聲的影響,再加上脈動轉矩導致的轉速波動都會對Tcomp產生干擾項ξ,此時補償轉矩Tcomp則表示為:

將式(8)和式(9)相減可得:

根據式(10)可知,實際測量中的轉速偏差會導致補償轉矩的偏差ΔTcomp,ΔTcomp作用于傳動鏈中會改變模擬風輪時的氣動轉矩,最終影響WTS模擬風機時的機械特性。
補償轉矩偏差ΔTcomp的存在將造成以下影響:
(1)如圖5所示,WTS模擬的轉動慣量Jt要適中,一旦模擬的轉動慣量過大,干擾項將被放大并淹沒補償轉矩Tcomp,最終影響WTS機械動態的模擬[15]。
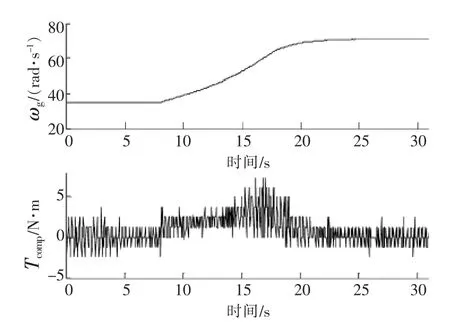
圖5 轉動慣量Jt過大時補償轉矩Tcomp效果
(2)如圖6所示,系統的采樣周期T要適中,采樣周期T過小會將補償轉矩Tcomp淹沒在被放大的干擾項ξ中;同時過大的采樣周期則會影響控制系統的帶寬,進而影響WTS機械動態模擬的準確性[16-17]。
(3)WTS在實際應用過程中,傳動鏈中的干擾不容忽視,提高WTS模擬的準確性需要對噪聲干擾進行必要的處理。
3 基于噪聲抑制的改進策略設計
本文研究分析WTS系統中編碼器采集的轉速信號以及噪聲的影響機理,針對噪聲的特點選擇狀態觀測器進行傳動鏈的噪聲處理。
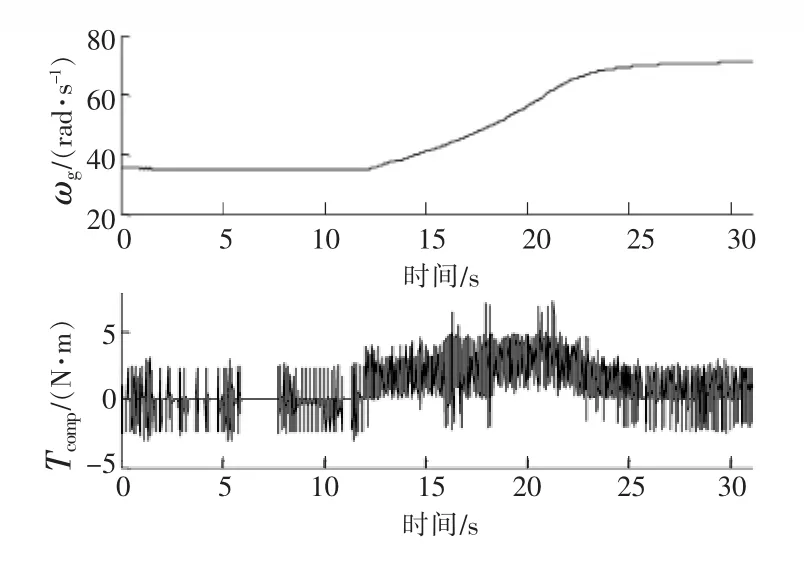
圖6 采樣周期T過小時補償轉矩Tcomp效果
3.1 傳動鏈轉速噪聲的分析
圖7所示為WTS系統通過編碼器獲取的傳動鏈發電機的轉速信號及通過對轉速進行微分計算后的加速度信號。可以看出,由轉速直接微分計算加速度對噪聲放大的作用十分顯著。轉速信號通過編碼器獲取時較光滑,一旦經過微分計算便存在大量毛刺,將加速度信號淹沒。
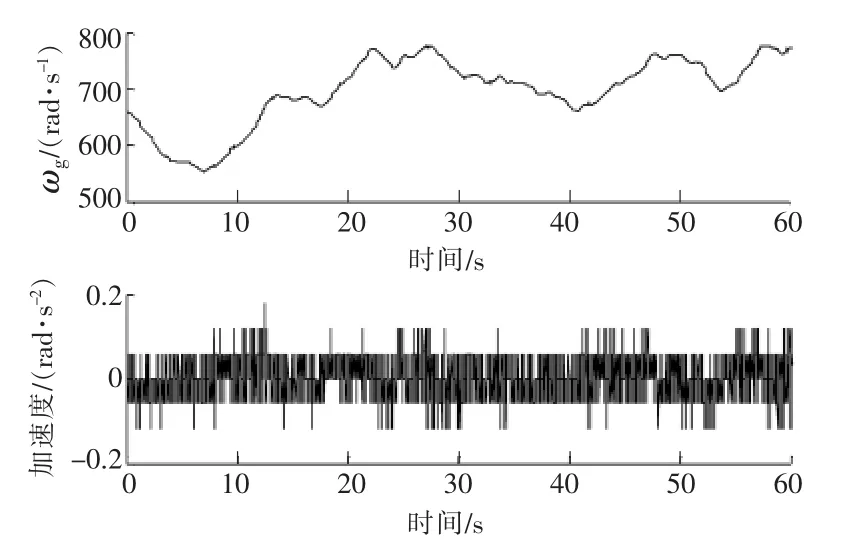
圖7 微分求解加速度的效果
將上述的轉速和加速度信號進行頻譜分析。如圖8所示,WTS傳動鏈的轉速信號幾乎不存在高頻噪聲;如圖9所示,若對轉速信號進行微分后,其得到的加速度信號中則存在大量的高頻噪聲。
因此,通過微分計算求解加速度的方式在實際工程中存在明顯缺陷,需要對加速度計算進行改進優化。
3.2 基于狀態觀測器的改進策略
Luenberger觀測器可以結合系統模型和實際輸出對觀測器進行校正,進而重構系統狀態。該觀測器針對線性系統具有良好的觀測性能,比卡爾曼觀測容易實現,同時不存在滑模觀測的震顫等問題,在實際控制工程中應用廣泛[19-25]。
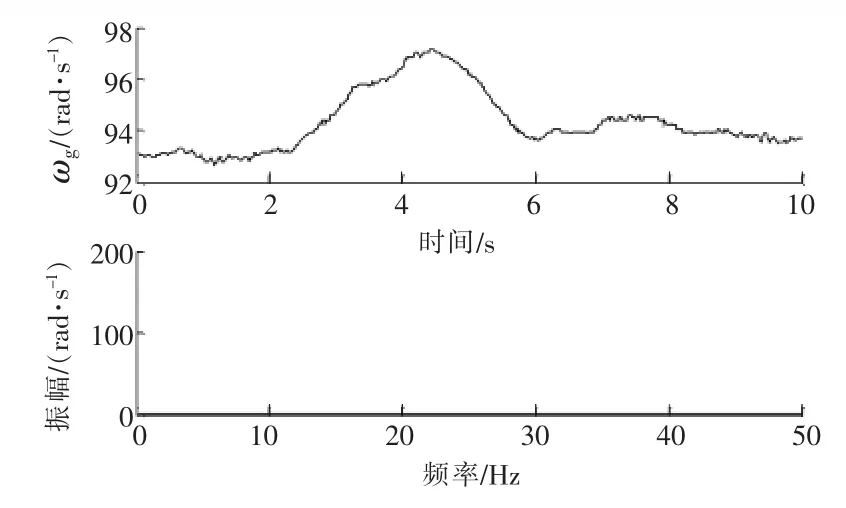
圖8 轉速信號及其頻響特性
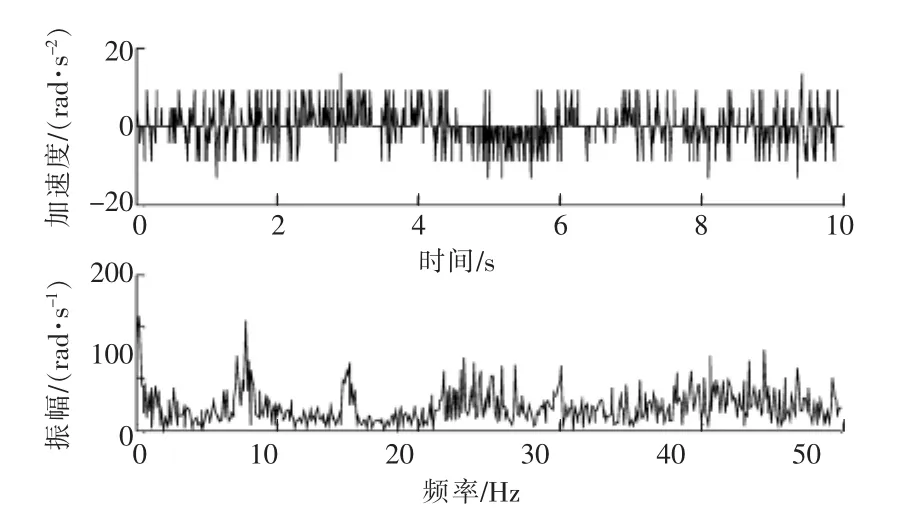
圖9 加速度信號及其頻響特性
本文采用Luenberger觀測器對加速度的求解進行優化處理。如圖10所示,在搭建Luenberger觀測器時,將發電機轉速ωg作為Luenberger觀測器的信號輸入,將發電機的轉速加速度β作為輸出。
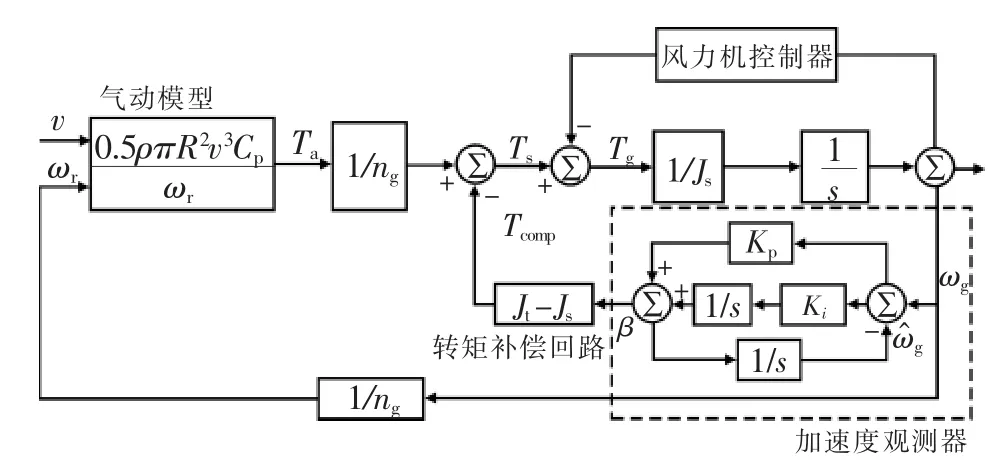
圖10 含Luenberger觀測器的WTS模型
圖中虛線框部分即為加速度觀測器,其反饋校正系數Kp能夠按發電機轉速ωg變化改變相應加速度補償量,從而讓觀測轉速能及時跟上實際轉速。這一改進可以在無法獲得系統精準參數以及存在噪聲干擾的條件下得到準確的加速度估計值。
觀測器的反饋增益系數Kp越大,一方面會導致補償量越大,使得觀測器的跟蹤ωg越快;另一方面觀測器的響應速度也會越快,對噪聲也越敏感[26]。因此在Luenberger觀測器的設計中,反饋增益系數Kp具體數值的選取尤為重要。
Luenberger觀測器的結構如圖11所示,其傳遞函數可列寫如下:

由式(11)可知,Luenberger觀測器系統為二階系統,其阻尼比和截止頻率可根據加速度的精度、帶寬等條件求出[20],之后可確定Luenberger觀測器的反饋增益系數Kp與積分系數Ki。上文已提到Kp的取值在Luenberger觀測器設計中很重要,其值過大會使觀測器對噪聲變得更敏感,過小則會使觀測器的響應速度變慢跟不上,故要注意其值大小。
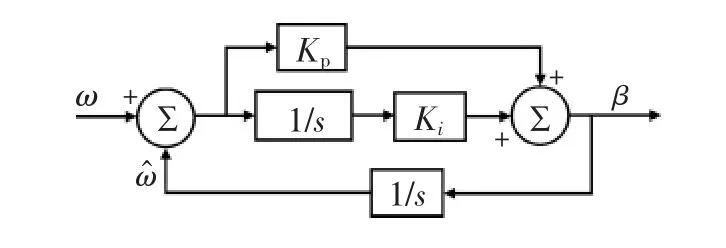
圖11 Luenberger加速度觀測器的基本結構
如圖12所示,對使用了Luenberger觀測器的風力機模擬器重新建模,其傳動鏈模型的傳遞函數列寫如下:
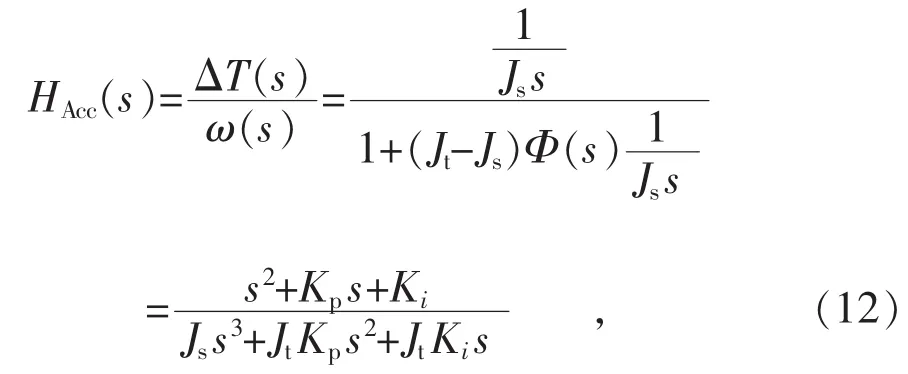
其中, ΔT=Ta/ng-Tg。
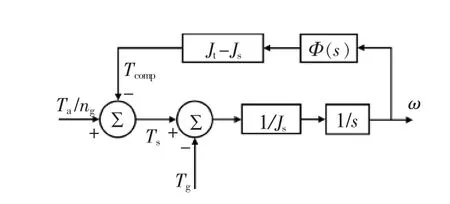
圖12 含Luenberger觀測器的WTS傳動鏈模型
閉環特性方程為 D(s)=Jss3+JtKps2+JtKis=0, 勞斯陣為:
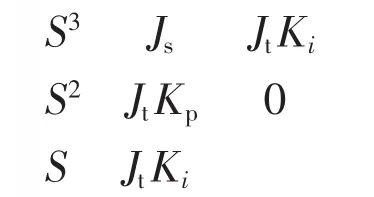
根據勞斯穩定的充要條件:
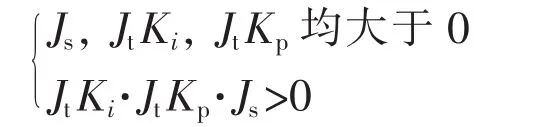
所以, 當 Kp>0, Ki>0 時, 含 Luenberger觀測器的模擬風力機系統在連續系統里是穩定的。
4 考慮噪聲抑制的風力機模擬器的實驗驗證
以基于直接微分求解加速度的WTS作為對照組,分析加速度頻響特性[18],以觀測轉速數據與實際轉速對比為評價指標,利用實驗驗證WTS對噪聲抑制的效果。
實驗平臺相關設備的主要參數如表1所示。發電并網系統的發電機為PMSG(永磁同步發電機);實時數字模擬系統利用PLC完成實時轉矩指令的計算,實現機械動態模擬;風輪模擬系統利用三相異步IM(感應電動機)結合機械飛輪來模擬實際風輪的氣動轉矩。
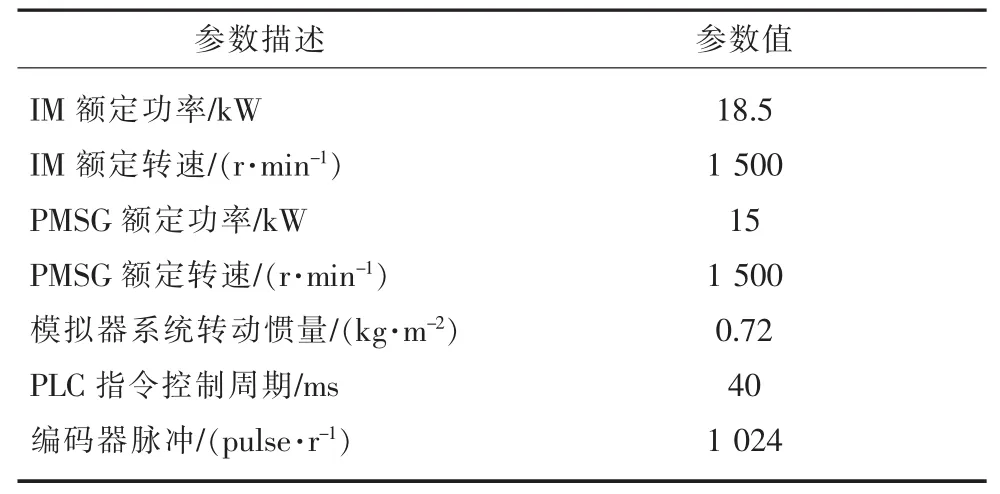
表1 風力機模擬器平臺參數
Luenberger觀測器有效性實驗模擬的是NREL(美國國家可再生能源實驗室)的CART3型風力機[22],采用的測試風速如圖13所示,測試時間為120 s。
觀測器采用如圖12所示的結構,反饋增益系數Kp取1.5,積分系數Ki為0.001,PLC運行周期 T 為 0.01s。
實驗結果如圖14所示。圖14(b)中Accel是對測量轉速微分求解得到的加速度;圖14(c)ObserverAccel是觀測器觀測得到的加速度;圖14(a)是Luenberger觀測器的觀測轉速AccSpd(觀測加速度積分)與實際轉速OperSpd的對比圖。
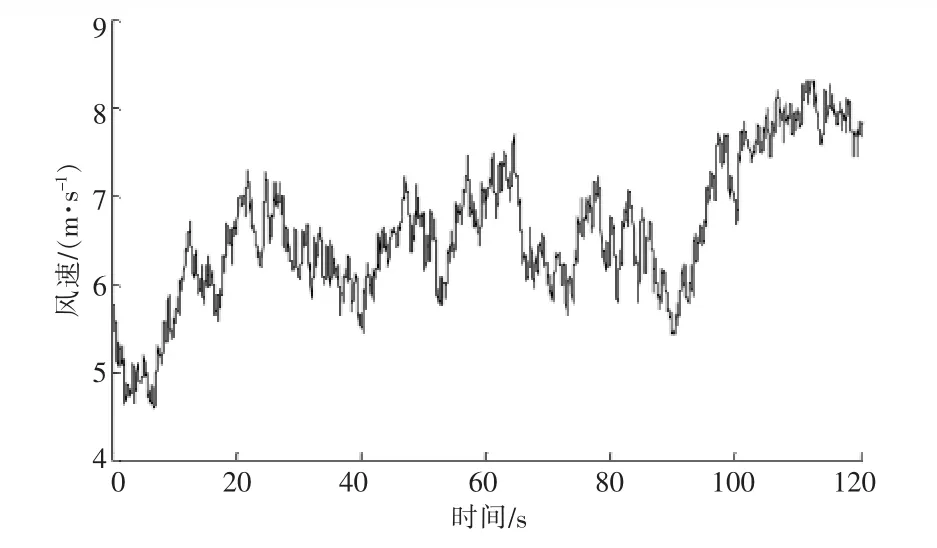
圖13 測試風速序列圖
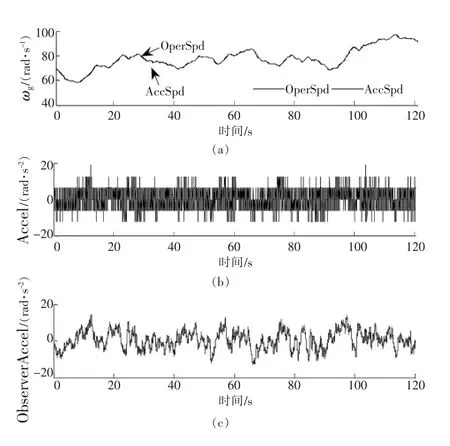
圖14 發電機加速度及其頻響特性
根據實驗結果可以發現:狀態觀測器的ObserverAccel變化軌跡清晰,而Accel變化軌跡被噪聲所覆蓋,表明Luenberger觀測器能有效觀測加速度信號。
以實際轉速OperSpd為基準值,可分別計算出觀測轉速AccSpd與其誤差的極值和標準差,通過比較上述兩者轉速誤差的極值和標準差,也可從另一個側面分析Luenberger觀測器的觀測性能。具體結果如表2所示,可以看到:Luenberger觀測器觀測轉速和實際轉速的最大誤差是6.66 r/min,兩者誤差的標準差是2.25。
為了掌握Luenberger觀測器對噪聲的濾波性能,還需對觀測加速度進行幅頻分析,結果如圖15所示。經過與圖9進行比較,可知在相同激勵條件下,Luenberger觀測器的觀測加速度含有的高頻噪聲接近于0。因此本文提出的Luenberger觀測器具有較強的濾波性能,觀測結果具有有效性。

表2 Luenberger觀測器的轉速與實際轉速對比
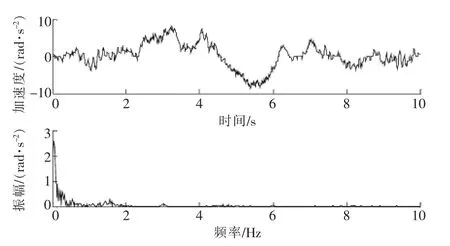
圖15 發電機加速度及其頻響特性
5 結語
本文分析了WTS傳動鏈轉速噪聲對風機機械動態模擬的影響機理,指出了微分求解加速度會放大信號噪聲,并明確了噪聲抑制的必要性。在此基礎上提出使用狀態觀測器來觀測加速度信號的改進策略,同時根據此策略設計了考慮噪聲抑制的風力機模擬器。最后,通過實驗證明基于狀態觀測器的WTS能夠有效抑制轉速噪聲,從而提高WTS機械動態模擬的準確性。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09