基于LabVIEW的無人機飛行狀態監測系統的設計
2019-03-06 08:24:46曹雍川蘇雨澈
自動化與儀表 2019年2期
謝 檬,曹雍川,蘇雨澈
(1.西安交通大學 城市學院,西安710018;2.國家電網漢中供電公司,漢中723000)
在人類航空史上, 多旋翼無人機從誕生到應用,經歷了很長的過程[1-3]。 與其它無人機對比,四旋翼無人機具有結構簡練、占地小、質量輕、控制靈動便利、可垂直升降、可懸停在空中等優點,無論在軍事范圍還是在民用范圍都得到了普遍的應用[4-8]。 目前,四旋翼飛行器主要由飛控手目視操控飛行過程,其平均航跡偏差高達5.2 m,平均高度偏差為0.9 m,滾轉角和俯仰角的波動幅度小于8°,傳感器的溫度降低了2 ℃。 為了解決飛控手目視檢查造成的人為誤差[9-11],所設計的基于LabVIEW 的無人機地面控制系統,可以實現無人機飛行狀態信息的自動采集和性能評估。 無人機的飛行狀態信息包括三軸姿態角、三軸角速度和三軸加速度。 通過LabVIEW 平臺的監測系統實時顯示、控制、評估和記錄無人機飛行狀態信息。
1 總體方案設計
根據四旋翼飛行器的工作原理及特點,先對以下檢測信號進行數據采集:x,y,z 軸的角速度;x,y,z軸的加速度;仰角,滾動角,航偏角。 然后將這些信號傳輸到LabVIEW 中, 去設計仿真飛行器飛行狀態的監測系統。 整個系統包括硬件和軟件兩大部分。 硬件主要是測試對象的傳感器,采集卡,計算機等;軟件采用LabVIEW 圖形化語言編程。 其控制系統結構如圖1 所示。

圖1 地面控制系統結構框圖Fig.1 Structure block diagram of the ground control system
2 軟件設計
監測系統的軟件設計采用圖形化編程軟件平臺LabVIEW[12-15],主要實現以下功能:①飛行姿態各項參數的實時測量及顯示;②超出預設飛行范圍時進行報警,地面控制臺重新發送控制命令;③數據回放 便于查閱飛行時在不同時期的歷史記錄,為故障檢測提供平臺;④數據采集 將監測信號讀取到上位機,進行顯示及數據處理。
2.1 軟件功能
系統軟件采集相關參數,通過設置數據采集間隔和上限報警值來判斷飛行航線是否在規定的范圍。若在規定范圍內則繼續對數據進行采集并記錄結果;若不是,則顯示報警并重新發送控制命令,飛行重新開始。 地面控制系統的數據采集流程如圖2 所示。
由圖可見,首先設定數據采集間隔和上限報警值,然后采集各項飛行數據并實時顯示,判斷高度值、速度值是否超出設定范圍。 如果超出設定的范圍就會顯示報警提示,并重新發送控制命令,飛行重新開始;如果沒有超出設定的范圍則繼續進行數據采集并實時顯示等。
2.2 控制系統前面板設計
控制系統前面板包括采集設定界面和數據查詢2 個子界面,如圖3 所示。 采集設定界面包括實時顯示表盤、實時顯示曲線、上限值設定及報警系統、截止頻率和記錄間隔設置、開始記錄及停止按鈕。

圖3 控制系統前面板Fig.3 Front panel of control system
圖中,實時高度是對無人機在起飛、航行、降落期間高度變化的數據,顯示單位m;實時飛行速度為在某一時間點上無人機的具體速度, 顯示單km/h;俯仰角為無人機飛行的方向與水平面的夾角,顯示單位(°);滾轉角為飛機繞機體坐標系縱軸的旋轉運動,該系統可測量無人機“左滾”與“右滾”角度,顯示單位(°); 截止頻率為當保持輸入信號的幅度不變,改變頻率使輸出信號降至最大值的0.707 倍,單位Hz; 采集到的數據將按照所規定的時間間隔記錄,單位s。
3 系統測試
3.1 無人機起飛姿態監測模式
點擊“開始”按鈕,開始采集監測數據并顯示至虛擬面板;點擊“停止”按鈕,數據采集暫停并將所采集的數據以excel 表格形式存儲至存儲電路。
無人機的起飛姿態監測模式界面如圖4 所示。統一規定將頻率設為0.125 Hz, 試驗數據記錄間隔設置為1 s。

圖4 起飛姿態監測模式Fig.4 Taking off attitude monitoring mode
由圖可見,無人機正處于起飛狀態,此時的監測數據見表1。 由于流速越大,壓強越小,在飛機起飛時, 飛機機翼下方的流速小于機翼上方的流速。因此,無人機必須加速起飛,此時無人機的俯仰角和滾轉角緩慢上升。
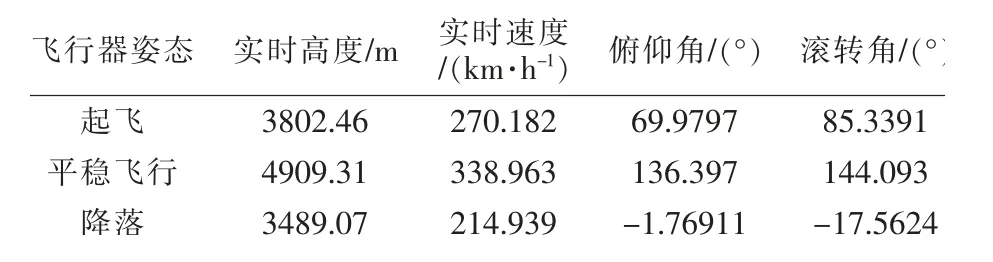
表1 無人機姿態監測模式下的實時數據Tab.1 Real-time data in UAV attitude monitoring mode
3.2 無人機平穩飛行姿態監測模式
無人機的平穩飛行姿態監測模式如圖5 所示,實時數據見表1。在平穩飛行狀態時,無人機的飛行高度和飛行速度均基本保持不變,前進靠的是發動機的動力帶動螺旋槳旋轉產生的向前牽引力或是噴氣產生的向前推力,其飛行姿態也基本不發生變化。

圖5 平穩飛行姿態監測模式Fig.5 Smooth flight attitude monitoring mode
3.3 無人機降落姿態監測模式
無人機的降落姿態監測模式如圖6 所示,實時數據見表1。此時,無人機的速度、高度,以及滾轉角和俯仰角均處于下降狀態,降落是減小發動機的推力,使飛機速度減小,從而減小空氣流經機翼的速度,從而減小升力,使飛機下降。

圖6 降落姿態監測模式Fig.6 Landing attitude monitoring mode
3.4 數據存儲及回放模式
數據存儲及回放模式如圖7 所示,主要是對系統采集監測得到的實時數據進行存儲和查看,并進行統計分析。 在程序主界面上,點擊左上角的數據查詢按鈕,再對數據查詢設置查詢起始時間以及查詢結束時間進行區域規定, 之后點擊確定按鈕,此時就可以對之前的測試數據進行回放。

圖7 數據存儲及回放模式Fig.7 Data storage and playback mode
4 結語
所設計的基于LabVIEW 的無人機飛行狀態監測系統采用MPU6050 九軸傳感器采集角速度、加速度、仰角、滾動角和航偏角,并將信號傳入虛擬儀器中,利用LabVIEW 軟件搭建虛擬監測系統。 在不同的監測模式下,采集監測信號的數據,實現了數據的顯示、處理、報警、數據存儲及回放等功能。 通過虛擬平臺,對無人機飛行狀況進行監測,測試結果證明,計算機結合虛擬平臺構建的監測系統可以實時監測無人機飛行狀態的各項指標,不僅可以進行故障分析,而且解決了飛控手目視檢查造成的人為誤差,提高了無人機控制的性能指標。
猜你喜歡
兒童故事畫報·發現號趣味百科(2025年8期)2025-08-23 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代陜西(2020年13期)2020-08-24 08:22:02
電子制作(2018年11期)2018-08-04 03:25:42
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
新聞傳播(2015年11期)2015-07-18 11:15:04
