敏捷成像衛星自主調度技術綜述
2019-03-14 09:39:58杜永浩譚躍進
宇航學報 2019年2期
謝 平,杜永浩,姚 鋒,譚躍進
(1. 中國航天系統科學與工程研究院,北京 100048;2. 國防科技大學系統工程學院,長沙 410073)
0 引 言
21世紀以來,隨著海洋開發、減災救災、環境保護和國土資源監測等眾多領域對地觀測需求的激增,我國開始大力推進高分辨率成像衛星的研制工作。為應對我國復雜的地緣政治環境及國內的突發事件,有效降低衛星響應時間,第一時間獲取突發事件的情報信息,研制性能更為智能化、敏捷化的成像衛星成為當務之急。
根據當今衛星發展趨勢,衛星自主調度能力受到各個衛星應用大國的高度重視,我國也逐步開展了對敏捷衛星、快速響應衛星、星間組網、分離模塊群等新型遙感衛星技術的研究工作。其中,新型敏捷自主成像衛星涌現出全新的技術特點和應用模式,擴展了成像衛星調度的內涵,特別是敏捷衛星自主調度技術,為衛星管控帶來了以下優勢。
1)加強了衛星應對突發事件的快速響應能力。現有的調度方案通常是地面站對衛星一次性完成一天到數天的調度,將方案譯成指控指令后由地面天線上注成像衛星;衛星在此期間嚴格依照指令執行,無法修改[1]。這種分時段、分批次調度的管控模式時效性較低,不能及時響應突發事件。若衛星具有自主、靈活的任務調度和快速響應的能力,便可及時捕捉有利環境條件、實現快速重訪,避免重要動態情報信息獲取手段受制于國外衛星系統的窘境。
2)提升了衛星觀測效率,緩解了數據接收與處理壓力。我國在“十三五”期間在軌衛星的數量將超過200顆,地面管控中心數據的接收和處理壓力激增。同時,為避免衛星軌道預報和姿態控制誤差的影響,衛星通常會提前開機成像以保障目標覆蓋,從而產生了較多的無效觀測數據。而敏捷衛星自主調度能夠根據實時的軌道、姿態和載荷狀態信息進行成像調度,精確控制和縮減成像時間,提升觀測效率,減輕了數據壓力。
3)突破了衛星測控瓶頸、降低地面管控的復雜性。傳統地面任務調度是基于時間標記的控制指令模式,操作人員需根據衛星操作和載荷使用方法,將任務方案轉化為一系列衛星機動的相關參數。這種模式對地面管控要求較高,且需與衛星研制單位校對執行指令及參數,無疑增加了人力成本、降低了管控效率。此外,我國測控網大多只能在國內建站,衛星測控弧段較短。因此,為應對復雜空間任務需求,緩解有限測控窗口對指令序列上注的制約,具有自制指令轉譯與任務調度能力的敏捷衛星可大大降低測控資源的信息上注壓力。
4)保障了衛星可靠性、延長使用壽命,提升復雜任務的執行能力。隨著衛星能力的提升,用戶需求也日趨復雜化與多樣化。從星上能源優化利用的角度看,自主調度能夠實時制定姿態調整、溫度保持等相關控制策略,從而提高衛星運行可靠性、延長使用壽命。同時,衛星每一次任務都伴隨著姿態機動、相機開關等操作,一條指令出錯會影響后續的任務執行。由于我國衛星運行有一半以上的時間在測控弧段以外,故衛星的自主管理、運行和生存能力能夠保障衛星在境外時對復雜任務的有效執行。
綜上,敏捷成像衛星自主調度技術能夠利用實時信息,靈活自主地選擇衛星成像時機,提高應急目標的觀測成功率,快速地響應突發事件,對我國國土安全、資源監測、防災減災等軍事和民用領域具有重要意義。下面,本文將首先闡述敏捷成像衛星調度的內涵,隨后分別從自主感知、自主決策和自主協同三個方面介紹敏捷衛星自主調度關鍵技術,最后對敏捷衛星自主調度技術提出未來發展建議。

圖1 敏捷成像衛星自主調度關鍵技術Fig.1 Key techniques in autonomous scheduling for agile Earth observation satellites
1 敏捷成像衛星調度的內涵
1.1 敏捷成像衛星技術
從運動學的角度來講,成像衛星具有三個方向的平動自由度和三個方向的轉動自由度,如圖2所示。受衛星軌道的約束,衛星成像活動的開展只能依賴其轉動自由度方向上的運動,通常稱為側擺、俯仰和偏航。傳統的成像衛星只具備側擺方向的成像能力,如圖3 (a)所示,是目前成像衛星的主要在軌形式。
傳統成像衛星已得到廣泛應用,但同時暴露出單次過境成像形式單一、對區域目標成像能力有限、資源利用率低、受軌道約束影響較大等問題。傳統衛星針對區域目標的成像策略如圖3 (b)所示,可見,由于傳統衛星只能對軌道正下方的條帶區域開展成像活動,故范圍較大的區域目標必須采用多次過境的方式,帶來了較長的目標訪問周期和固存資源不必要的浪費。由此,結合傳統衛星的軌道機動能力和成像策略,本文將敏捷成像衛星定義為:

圖2 衛星六自由度模型Fig.2 Six degrees of freedom model for the satellite
定義1.(敏捷成像衛星)在沿軌道飛行過程中,衛星平臺或星上載荷通過側擺、俯仰和偏航三個自由度方向的軌道機動開展成像活動的一類成像衛星。
與傳統衛星相比,敏捷衛星具有側擺、俯仰、偏航三個方向的快速機動能力。對比圖3(a)與圖3(c)可知,傳統衛星只能在目標垂直上方才能開展成像活動,而敏捷衛星可以通過調整其俯仰與偏航角度,在同一軌道位置提供對多個目標的成像機會。對比圖3(b)與圖3(d)可知,敏捷衛星可以在單次過境中通過多次姿態調整實現對區域目標的連續成像,表現出更強大的任務執行效率和多星協同的兼容性[2-3]。由此,從決策的角度看,敏捷成像衛星的決策優勢具體表現為:1) 俯仰、偏航機動能力,為任務目標提供了更多的成像時間窗口;2) 高俯仰角成像能力,為任務目標提供了更長的成像時間窗口;3) 質量輕、姿態轉換迅速,為調度過程提供了更多的任務與約束沖突消解方式;4) 受目標位置和軌道約束弱,為多敏捷衛星自主協同成像提供了潛在的發揮空間。
1.2 敏捷成像衛星調度問題特征
成像衛星調度問題已被證明為NP難問題[4],而敏捷成像衛星的功能與任務需求甚多,故敏捷成像衛星的特征提取與分析是有效求解敏捷成像衛星調度問題的前提。一般來說,敏捷成像衛星調度問題具有收益的多樣性特征和約束的時間依賴性特性。
1)收益多樣性特征

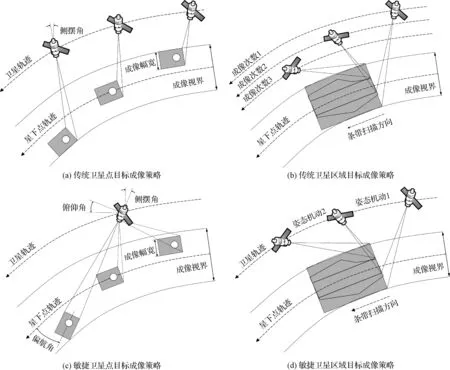
圖3 敏捷衛星與傳統衛星成像策略對比Fig.3 Comparison on the observation strategies between agile satellites and traditional satellites
Tangpattanakul等[7]將多用戶的敏捷衛星調度問題看作多目標優化問題,包括優化方案的整體收益和不同用戶間的收益差值。可見,多元化的用戶需求和地面測控中心的工作需要,為敏捷成像衛星調度問題帶來了收益多樣性特性。針對常規任務和有應急任務動態到達的調度場景,常見的敏捷成像衛星收益特征如表1所示。

表1 敏捷成像衛星調度收益多樣性特征Table 1 Diversified characteristics of revenues in agile observation satellite scheduling
2)約束時間依賴性特征
敏捷成像衛星調度的問題約束具有很強的時間依賴性,即主要約束與時間密不可分,如表2所示。時間依賴性約束是制約敏捷衛星效率發揮的關鍵。

表2 敏捷成像衛星約束時間依賴性特征Table 2 Time-dependent characteristics of constraints in agile observation satellite scheduling
在成像活動方面,敏捷衛星的任何成像活動只有在目標可見時間窗范圍內執行才具有收益。在衛星姿態轉換方面,在不同時刻,由于衛星需要調整的姿態角度不同導致姿態機動需求時間也不同,姿態機動需求時間Δt一般可用式(1)表示。
Δt=Δg/v+C
(1)
式中:Δg為相鄰衛星任務的綜合姿態轉角,v為姿態機動轉速,C為衛星姿態穩定時間[8]。
在固存容量方面,成像衛星的存儲上限不僅受限于衛星單次服務時間,同時依賴于衛星何時對固存進行格式化擦除。在電量方面,成像衛星對日充能的時刻與時間也制約著衛星的成像能力[9]。
1.3 敏捷成像衛星調度問題一般化描述
針對不同應用場景,學者們對敏捷衛星調度問題開展了不同的問題建模,但在求解過程中充分發揮敏捷衛星俯仰、偏航機動能力,消解時間、時序約束的本質是相同的。故本文在已有研究的基礎上,給出敏捷成像衛星調度問題的定義和一般化描述:
定義2.(敏捷成像衛星調度問題)在滿足時序和資源約束的前提下,對敏捷成像衛星的元任務進行選擇、分配與排序,以實現某項或某幾項任務收益值最大化的約束滿足優化問題。
其中,元任務是敏捷成像衛星調度問題中的調度對象。根據常見任務需求,本文將元任務定義為:
定義3.(元任務) 通過成像衛星任務規劃預處理技術,對用戶和衛星管控單位提出的復雜成像、數傳及星上狀態維護等任務進行分解,而產生的能夠由衛星一次性完成的可調度任務單元。

表3 敏捷成像衛星常見元任務類型Table 3 Unit task types of agile observation satellite
根據敏捷成像衛星任務分類的不同,元任務的主要類型如表3所示。其中,對日定向任務指衛星太陽能帆板在陽照區對太陽定向并充能;固存擦除任務指部分在軌衛星受固存技術的限制,通過對星上固存進行格式化的方式來存儲新的成像數據。
多星多軌敏捷成像衛星調度問題可以描述為:
問題優化目標如式(2)所示:最大化任務完成率、最大化任務全局優先級和最大化任務全局完成質量等。其中,q(ri)表示元任務ri基于任務執行時間等實際情況的任務質量評估函數[10]。

表4 多星多軌敏捷成像衛星調度問題主要符號說明Table 4 Major symbols descriptions in the scheduling for multi agile observation satellites
(2)

(3)
q(ri)≥qi,xijklm=1
(4)

(5)

(6)
hi+li+t(ri,ri′)≤hj,xijklm=xi′j′k′l′m′=1且 (7) ?n≤|R|且hi (8) ?n≤|R|且hi (9) 約束(3)表示元任務ri至多只能執行一次,即至多在一顆衛星的某條軌道的某個時間窗內執行。約束(4)表示任意元任務的完成質量需大于用戶提出的質量要求。約束(5)表示任意元任務的執行時間需坐落在時間窗內。約束(6)表示任意元任務的執行時間需滿足用戶要求。約束(7)表示對同一顆衛星而言,任意兩個元任務的執行時間沒有重疊,且執行間隔不少于敏捷衛星姿態或模式轉換的最短時間。其中,t(ri,ri+1)表示根據兩個元任務的衛星狀態而計算轉換時間的函數。約束(8)表示對任意衛星j而言,隨著其固存增減,任意時刻固存量不能超過星載固存上限。約束(9)表示對任意衛星j而言,隨著電能充放,任意時刻電量消耗不能超過星載電池容量上限。 上述約束構建了敏捷成像衛星調度問題的一般化模型。針對不同的調度背景,各元任務間可能還存在著其他復雜的約束關系,但由于多星多軌的敏捷衛星調度往往考慮因素眾多,問題規模較大,決策維度較高,在工程應用和科學研究中,其調度問題常被一定程度地簡化。例如采取單星多軌、多星單軌、只優化任務序列、成像與數傳任務分段式調度、不考慮固存擦除或對日定向等的簡化方式[11]。這些簡化方式對降低敏捷衛星調度問題維度,提升自主調度的響應速率和魯棒性起到非常重要的作用。 近年來,利用自主調度技術來提高敏捷成像衛星等航天器任務執行效能的方式受到了越來越多研究人員的重視。針對現階段敏捷成像衛星主要自主形式與使用目的,本節重點論述敏捷成像衛星自主感知、自主決策和自主協同等三項關鍵技術。 自主感知是指敏捷成像衛星具備圖像處理、位置監測、故障診斷等傳感器載荷,在飛行過程中自主感知目標、環境或自身狀態變化,進行狀態更新與信息通訊的自主技術,是敏捷成像衛星自主調度技術的重要基礎。根據感知對象與目標不同,目前主要使用的自主感知技術包括目標感知和環境感知。 2.1.1目標感知 目標感知是以衛星成像任務目標為感知對象,圍繞提升成像任務執行效率的自主感知技術。目前比較成功的帶有目標感知功能的敏捷衛星有Firebird,Pleiades,OptiSAR和EO1等。Firebird是德國宇航局火災識別系統的重要組成部分,該衛星能捕獲火災位置、火情區域規模等火災參數信息,并通過火情發現等自動探測事件來執行自主調度活動[12]。 法國宇航局研制的Pleiades敏捷衛星裝備了高分辨率光學相機、云層覆蓋探測器等自主感知設備。當接收到目標變化信息時,星上系統會自主調整任務,并改變待執行任務的狀態信息,避免了地面管控與星地鏈路通訊的復雜流程和傳輸延遲[13]。加拿大OptiSAR星座由來自兩個軌道的8個串聯模塊組成,每個模塊包含一顆合成孔徑雷達(SAR)衛星和一顆光學衛星。OptiSAR星座的自主感知功能是通過SAR衛星和光學衛星協作實現,不僅可同時對某一目標進行SAR成像與光學成像,還可通過SAR衛星的云判系統避免光學衛星對云霧遮擋區域進行無效觀測,從而提高了光學衛星的成像效率[14]。EO1是由NASA研制的敏捷自主成像衛星,它能發現地球表面的火山噴發、冰層消融、云霧遮擋、地殼運動等自然科學事件[15]。 由表5可知,云層是敏捷成像自主衛星的主要感知對象。雖然云層的出現并不如火災、地殼運動事件的緊急性和災害性,但云層會顯著降低光學衛星的成像效果。在云量描述方面,Baek等[16]分析了云量對衛星成像質量的影響,通過建立不同規則來描述云量信息,提出了氣象約束條件下的求解方法。孔祥海等[17]根據云層與地面匹配關系的差異建立了星上自主云頂高度計算方法。在任務優化方面,Beaume等[18]先通過云霧探測器對目標上空的氣候進行實時判斷,再結合在線調度方法和敏捷衛星的機動能力來選取合適的觀測角度,以降低云霧遮擋對成像質量的影響,并給出敏捷衛星的最短姿態機動路徑。 表5 敏捷成像衛星自主感知對象Table 5 Autonomous perception objects of agile satellites 2.1.2環境感知 環境感知是以衛星運行環境為感知對象,以保障衛星在軌安全、穩定服務為目標的自主感知技術。其中,衛星運行環境包括內部環境和外部環境,內部環境感知主要體現在衛星對自身故障與資源狀態的感知,外部環境感知主要為衛星對障礙物的感知。 在自身故障感知方面,李玉慶等[19]設計了一款包含任務調度、指令執行與監控的自主衛星調度系統,該系統能夠在發現故障時進行自主操作。蘇振華等[20]設計了一種包括離線自主學習和在線故障診斷功能的星上自主故障診斷方法,前者基于歷史數據自主學習,獲得神經網絡模型存儲于知識庫;后者依據神經網絡模型,對成像數據進行實時在線診斷。 在障礙感知方面,目前主要通過Box區域判定策略和碰撞概率評估策略實現衛星對環境障礙的感知。Box區域判定策略以衛星為中心,以長方體范圍定義不同程度的碰撞警報區,當監測到障礙物進入警報區內則觸發衛星規避響應[21]。此外,Amico等[22]運用相對偏心率和軌道傾角矢量來描述多星編隊相對運動,通過令二者平行來保證多星之間安全距離,進而開發了一種被動式衛星自主避碰系統[23]。 Box區域判定策略降低了障礙監測誤差的影響,安全性高,但預警虛報率也較高,易導致衛星頻繁機動,降低了燃料利用和任務執行效率。對此,學者們引入碰撞概率評估策略,在Box區域判定的基礎上通過隨機分析方法實現對障礙碰撞概率較為準確的計算,為衛星環境感知技術提供了可靠支持[24]。 自主感知功能可以比作敏捷衛星的眼睛和耳朵,而自主決策技術則是敏捷衛星的大腦。自主決策是指敏捷衛星具備在線計算與決策能力,在脫離或部分脫離地面管控的環境中,根據衛星自主感知的結果和預期計劃,智能地對任務進行決策并執行的自主技術[25-26]。大量學者立足自主衛星動態決策和不確定性決策問題,對自主決策的相關技術進行了研究。 2.2.1動態決策 1)基于響應的動態決策 自主衛星動態響應一方面來源于自主感知的結果。衛星在接受到自主感知信息后,會根據任務需求開展不同程度的自主響應。以云層感知結果為例,Beaumet等[18]首先通過云霧探測器來實時評估目標上空的氣候條件,計算出目標合適的成像角度,并指導敏捷衛星進行軌道機動。但由于云量評估與成像活動幾乎同時進行,只能避免低質量成像,并不能改善成像效果,是一種被動式衛星成像優化機制。而OptiSAR[14]采用SAR和光學衛星協同的方式,通過SAR衛星云判功能,為后續成像衛星提供準確的云層信息和充裕的動態響應空間。此外,在動態目標成像的過程中,敏捷衛星往往需要根據目標形狀和衛星軌道參數對目標進行動態條帶分割。 另一方面,自主衛星動態響應來源于地面測控中心傳輸的臨時任務需求。例如,Wu等[27]將成像任務分為普通任務和緊急任務,在確保緊急任務優先級的同時實現任務總收益的最大化。但基于優先級的決策策略犧牲了低優先級的任務收益,在動態事件觸發頻繁的情況下會影響決策效果。由此,李志亮等[28]設計了響應式衛星動態決策系統,通過預調度策略顯著降低了臨時任務對原有調度方案的擾動。Li等[29]指出大部分決策問題集中關注約束消解和任務收益最大化,并以緊急任務插入引起的全局延誤時間為優化目標,實現了多星自主緊急任務的有效調度。 雖然基于響應的動態決策機制已經得到諸多應用,但也存在著一些局限:(1)觸發響應的形式單一;(2)決策時間短,以啟發式或貪婪方法為主,決策能力有限;(3)響應過程受自主感知靈敏度的影響;(4)過度頻繁的響應造成星上計算資源浪費和決策優化效果不佳。由此,學者們利用在線滾動決策機制很好地求解了敏捷衛星自主決策問題,在一定程度上與基于響應的動態決策起到優劣互補的作用。 2)滾動決策 滾動決策的方式提供了周期性的決策方案調整機會,同時也降低了星上一次性決策問題的規模,在敏捷衛星有限的決策能力下表現出良好的適用性。例如,Qiu等[34]提出了一種基于滾動時域的動態決策策略,周期性地觸發或由事件觸發對成像任務的重新調度,并對比了引入不同優先級和啟發策略的決策效果。針對觀測需求動態變化的問題,劉嵩等[35]提出了如圖4所示的基于任務軸的滾動決策策略,設計了規劃、決策、執行和信息反饋相結合的自主任務調度框架。歐洲多國合作的PLANET多星任務調度系統將任務分成不同優先級,逐級利用基于時間順序的排序算法將任務分配至各個衛星,并遵循效率性、最優性和穩定性規則滾動地進行重規劃[36]。 與基于響應的決策機制相比,滾動決策能夠對滾動窗口內的任務進行較為充分的迭代優化,在滿足動態決策需求的同時提升了全局優化程度。不過,滾動決策缺乏對任務響應的靈敏性,在動態任務連續到達情況下響應效果欠佳。由此,針對敏捷衛星自主調度場景特點,合理選擇動態決策機制或混合決策框架,有助于提升敏捷衛星自主調度的魯棒性。 圖4 基于滾動決策的自主決策示意圖Fig.4 Autonomous decision based on rolling decision 2.2.2不確定性決策 不確定性決策策略主要應對了衛星執行任務中的不確定性因素,通過在決策過程中引入預留機制和調整空間,以提升衛星應對不確定影響的能力。 成像衛星的工作環境具有很強的不確定性。對此,Myers[37]設計了一種具有生成調度方案、執行方案、檢測方案和修復方案等功能的連續任務決策框架。該框架能根據環境信息和任務需求調整原有方案,用戶也可通過該框架指導任務方案生成、修正和監控的相關工作。Chien等[38]指出自主衛星必須平衡長期目標和短期目標,既需要通過提前決策來避免短視的決策,又要有面向突發事件的及時響應能力。Li等[39]引入模糊數和神經網絡來評估環境擾動對系統的影響,當遇到重要擾動時,系統直接響應;當遇到一般擾動時,系統根據決策時間進行重調度;若遇到微弱擾動時,系統直接忽略影響。 在資源不確定性方面,針對地面調度中心對衛星資源消耗預估的誤差,以及地面上行鏈路限制導致的衛星應急響應慢等問題,Lenzen等[40]以地面中心資源的上下邊界生成衛星成像方案,再運用星上決策模塊根據環境信息對調度方案進行簡單調整,有效解決了地面約束推理不精確的問題。針對同一問題,Maillard[41]考慮到地面中心為保障衛星任務的可靠性而預留資源的情況,利用敏捷衛星的自主決策方法使衛星可根據目標優先級自主調整不同目標的時間余量,提升了衛星資源利用率和成像效率。 自主協同技術是指一顆或多顆衛星具備星上在線決策能力,利用星間通訊鏈路完成任務的分配與排序,是敏捷衛星自主調度技術的群智能表現。Lavallee等[42]對航天器自主協同調度做了綜述研究,指出自主協同技術在降低運行成本與響應時間、提高效率方面具有重要作用。自主協同技術可以分為集中式協同和分布式協同,兩者通訊方式如圖5所示。 圖5 敏捷衛星自主協同技術示意圖Fig.5 Autonomous cooperation technique of agile satellites 2.3.1集中式協同 集中式自主協同調度是綜合考慮各項因素,在全局范圍內搜索最優解的傳統調度模式。集中式調度框架以主星為調度中心,替代了地面管控中心的調度功能,在中小規模的協同任務中表現出良好的調度效率和質量,是多星協同任務調度的常用方法。 敏捷衛星集中式協同工作具有一定的種群特性,故群智能優化算法在多星協同調度問題中具有良好的適用性。例如,Zheng等[43]通過自適應遺傳算法分解任務目標以實現星座的全局任務調度。Wu等[44]基于蟻群算法信息素的方式隨機分配不同觀測任務至不同的衛星以解決多星協同調度問題。針對敏捷衛星集中式成像任務目標密集、姿態控制頻繁、且任務之間相互影響的問題,邱滌珊等[45]借鑒蟻群系統和最大最小螞蟻系統的思想設計尋優策略和信息素更新策略,有序執行了擁擠的組合成像調度任務。 由于多星集中式協同調度過程中考慮因素眾多,學者們常通過分層式或模塊化的管理機制降低問題規模。針對多敏捷衛星聯合調度問題長時間窗、多時間窗的復雜約束特征,孫凱等[46]將問題分解為任務資源匹配和單星任務處理兩個子問題,通過學習型遺傳算法解決任務資源匹配問題。姚敏等[47]將敏捷衛星星務軟件分解為若干任務模塊,以任務流程為單位,利用模糊神經網絡構建任務流程自主調度決策系統,有效提升了星務軟件的自主化和智能化水平。 敏捷衛星的自主協同不僅包括同構協同,在異構協同方面,Qin等[48]針對異構低軌敏捷衛星網絡,提出了基于截止日期的資源平衡式任務分配算法,利用從星的剩余電源電量和搭載的載荷類型選取侯選星。異構自主協同能夠充分發揮敏捷衛星的機動能力和傳統衛星的載荷能力,取長補短,更大限度提升星群協同任務執行能力與效率。 在主星統一調度和管理下,集中式協同掌握了全局的任務狀態和資源情況,具備獲取全局最優的條件,但在實踐中也表現出以下不足:1) 依賴主星運算能力,但敏捷衛星的載荷能力有限[49];2) 受通訊約束與延遲影響;3) 大規模場景中效果不佳。由此,綜合現代衛星高敏捷性和自主性特點的分布式協同技術成為了多星自主協同調度研究的重要方向。 2.3.2分布式協同 分布式協同調度是相對集中式調度而言,通過MAS(Multi-agent system)和自主協同技術,分布式完成任務分配的新興調度模式。分布式協同調度的優勢主要體現在:1) 魯棒性,極大減少了對主星調度決策水平的依賴;2) 并行性,降低了問題規模和響應層級,提高了快速服務能力;3) 實用性,提升了資源配置的合理性,增強了調度系統可拓展能力。 Bonnet[50]采用面向方案優化的自適應多Agent系統解決多目標的星座調度問題,衛星間通過本地調度和多次溝通來達到一致性意見。郝會成等[51]針對衛星初始任務方案中資源失效的情況,基于MAS構建了敏捷衛星動態任務重調度模型。Skobelev等[52]將成像需求視為需求Agent,將衛星和地面站視為資源Agent,利用資源局部搜索調度方案,再通過交互式迭代改進優化。劉子林等[53]在合同網分配機制的基礎上提出了遞歸式分配思路,有效避免了分配故障,實現了任務協同成本和執行成本的有機結合。 為進一步降低多星協同任務調度規模、緩解星上自主決策壓力,分層化的調度策略也發揮著重要作用。Mohammed[54]針對TechSat 21星設計了一個分層調度機制,先選取星簇,再由星簇將任務分配給小衛星。韓道軍等[55]搭建了分布式衛星編隊環境,設計了多星任務調度算法聯合使用的單機方案,解決了計算資源不足和傳統分布式算法同步性差的問題。張正強[56]將分布式衛星系統調度問題分為星群任務調度與單星自主控制兩個層次,建立了集中-分布式的調度架構,構建了包含全局控制層、通信與協作層、局部規劃層、監控層和執行層的混合結構。 雖然分布式協同具備良好的魯棒性、并行性和執行能力,但其難點與不足也較為明顯:1) 沒有考慮問題的所有因素,很難獲得全局最優解;2)依賴大量信息交互與計算的支持;3) 受分布式策略與算法影響顯著;4) 故障診斷與排除的難度大等。 由此,合理分析敏捷衛星自主調度問題特點,選擇合適的或組合使用協同調度策略,對提升復雜任務調度質量、效率和穩定性起到不可或缺的作用。 國內外科研人員圍繞敏捷成像衛星自主調度技術開展了諸多工作,但隨著對地成像需求不斷提升、敏捷衛星技術不斷發展,以及各式新型智能優化算法的運用,敏捷衛星自主調度技術也迎來了更大的挑戰和更廣闊的發展空間。結合敏捷成像衛星自主調度技術研究現狀,面向未來衛星任務需求,敏捷成像衛星自主調度技術可以向以下幾個方向發展。 1)敏捷成像衛星多元化任務預處理技術研究 敏捷衛星的軌道機動能力帶來了更多任務可執行時間窗口,同時意味著任務預處理的多樣性和可選擇性也更強。敏捷衛星的任務調度是建立在元任務的基礎上,故任務預處理水平將直接影響敏捷衛星的調度能力。現有的預處理技術通常只提供一種元任務分解方案,雖然降低了任務調度規模和求解難度,但也很大程度上限制了調度技術所能提升的收益空間。由此,在敏捷成像衛星自主水平和決策水平不斷提升的背景下,任務預處理技術應向著多元化的發展,為敏捷衛星提供充裕的任務調度空間。 2)敏捷成像衛星約束的時間依賴性研究 目前少數學者研究了敏捷衛星時間依賴性特征,且局限于時間窗與姿態機動約束。但在敏捷成像衛星實際調度中,特別是成像與數傳任務的一體化調度中,約束時間依賴性特征更加明顯:例如單次任務的成像與數傳時間受時序約束,連續任務的成像序列和數傳內容受時序約束,星載存儲容量的格式化時機與成像任務、數傳任務受時序約束等。由此,逐步還原敏捷衛星時間依賴性特征,梳理時序約束的類型與特點并將其運用到敏捷衛星調度模型與算法中也具有重要意義。 3)敏捷成像衛星自主調度智能算法理論研究 智能算法始終是任務調度問題求解的關鍵方法,但敏捷衛星現有的自主調度研究中多為啟發式算法,很少基于衛星應用場景的分析來設計求解質量更高的在線調度算法。在未來的敏捷成像衛星自主調度研究中,應該開展敏捷衛星在線式動態調度與重調度、分布式與并行算法理論、分層式自主調度與決策框架、大規模群智能算法理論等方向的研究。 4)大規模多星多軌敏捷成像衛星調度研究 多敏捷成像衛星自主調度問題是未來敏捷衛星大規模應用中必須要解決的難題,但目前該問題的關注度并不高。如何對現有的多種多星調度算法進行整合并使其可以適應敏捷自主衛星在線調度的應用場景,以及如何利用人工智能等相關領域的思想進一步提高星上決策和調度等能力,對求解大規模敏捷衛星調度研究具有重要的理論與實踐意義。 本文闡述了敏捷成像衛星調度問題的特征和一般化描述,分別從自主感知、自主決策和自主協同三個方面梳理了國內外敏捷成像衛星自主調度關鍵技術研究進展,并對未來敏捷成像衛星自主調度技術進行了展望。隨著敏捷成像衛星技術的不斷發展,以及民用與軍事領域對地成像任務需求、多樣性和自主性要求的不斷增加,敏捷成像衛星自主調度研究也日趨復雜。因此,為適應未來衛星技術發展趨勢和國家航天戰略發展需要,有必要深入研究上述問題,不斷促進敏捷成像衛星自主調度技術的發展。
sij=si′j′且hi2 敏捷成像衛星自主調度關鍵技術
2.1 自主感知技術

2.2 自主決策技術

2.3 自主協同技術

3 敏捷成像衛星自主調度的發展啟示與建議
4 結束語