不同粒度遙感信息的非線性優化Otsu分割算法
2019-03-22 01:37:44黃冬梅孫婧琦何婉雯張明華王振華
遙感信息 2019年1期
關鍵詞:優化
黃冬梅,孫婧琦,何婉雯,張明華,王振華
(1.上海電力學院,上海 200090;2.上海海洋大學 信息學院,上海 201306)
0 引言
遙感具有覆蓋面廣、光譜信息豐富及不同粒度應用需求的特點。圖像分割是指把圖像分成各具特性、互不相交像元集合的過程[1]。將遙感影像視為一類特殊的圖像,對其進行分割可提取不同地物類別,實現從數據,信息到知識的轉變[2-7]。遙感影像蘊含了不同粒度的空間內容,而多粒度遙感信息提取就是對遙感影像不同表達層次的內容進行分割[8]。例如基于遙感影像的海島信息提取,若信息提取的需求是海島面積普查,則只需將島嶼和海水進行分割,將此稱為粗粒度分割,若信息提取的需求是海島土地利用變化檢測,則需將島嶼上的不同地物類別進行分割,將此稱為細粒度分割。
閾值分割是圖像分割方法之一[9-11]。國內外學者進行了大量的研究,如日本學者Otsu基于聚類思想提出了最大類間方差圖像分割算法(Otsu算法),該算法計算簡單且不受圖像亮度與對比度影響[12]。Reddi等利用迭代方法將Otsu算法推廣為多閾值圖像分割算法[13]。Liao等提出利用查表方法改進多閾值Otsu算法,降低了圖像分割算法計算時間[14]。Liu等兼顧像素點以及其鄰域像素的平均灰度分布,將一維Otsu算法推廣至二維,改善了抗噪性[15]。Zhou等提出了一種改進螢火蟲算法的新圖像分割算法,解決了二維圖像閾值分割中計算時間長、精度低和錯分多的現象[16]。Bhandar 等改進了蜂群算法,實現了用于遙感影像中不同類別地物的分割[17]。Guo等基于盒式濾波(box filter)提出了二維Otsu分割算法(two dimensional Otsu,2D-Otsu),解決了圖像的分割時間長、精度低的問題[18]。Bhandar 等提出了基于群體智能的全局優化分割算法,解決了最優閾值窮盡搜索問題[19]。王玉等基于區域和統計的可變類分割方法,實現了圖像類別數的自動確定(閾值確定)及圖像的粗分割[20]。張金靜等提出一種分布式合成孔徑雷達(stop and reverse,SAR)圖像分割算法,提高了圖像的分割精度[21]。張海濤等基于閾值標記,提出了分水嶺彩色圖像分割算法,有效解決了過分割問題,具有較好的適用性和魯棒性[22]。陳鵬翔等提出了一種區域擬合的背景去除圖像分割模型,解決了圖像分割模型的能量泛函非凸性和局部極小解的問題[23]。
上述學者從圖像分割算法的改進、圖像分割閾值的選擇、圖像分割精度的提高和圖像分割時間的降低等方面對圖像分割算法進行了改進和優化,完善了圖像分割的理論體系。遙感影像作為一類特殊的圖像,其不同于傳統的二維圖像,遙感影像具有豐富的光譜信息,但各波段間存在較大的數據冗余,此特性增加了圖像分割的計算復雜性,另外遙感影像具有不同粒度的信息應用需求,即存在分割結果詳細程度的各異性或提取目的認知的多層次性[24],此特性增加了圖像分割的不確定性。
本文針對遙感影像數據冗余度高和多粒度的信息應用需求等特點,通過改進Otsu算法,設計了非線性優化Otsu分割算法:(1)將非線性優化圖像分割算法作為約束條件,量化了不同粒度信息需求和閾值之間的數學關系,提高了多粒度遙感信息的分割速度;(2)引入主成分分析(principal components analysis,PCA)算法對遙感影像的多波段信息進行降維,降低了待分割影像的信息冗余度。以舟山海域的海島地物信息提取為例,對非線性優化Otsu分割算法與Otsu,2D-Otsu,K均值聚類算法(K-means),模糊C均值聚類算法(fuzzy c-means,FCM)進行比較,闡述非線性優化Otsu分割算法的可行性。
1 非線性優化Otsu分割算法
1.1 非線性優化Otsu分割算法
本文通過改進傳統的Otsu算法,量化了分割閾值與不同粒度信息需求之間的數學關系,將其設計為非線性優化Otsu分割算法,具體算法如下:
目標函數: minε
約束條件:
(1)

本文通過迭代計算求解不同地物類別間的灰度閾值,量化不同粒度的信息應用需求,同時通過最大類間方差判斷,設置非線性優化Otsu分割算法的終止條件,減少算法遍歷次數的同時提高算法時間效率。
1.2 非線性優化Otsu分割算法的計算流程
非線性優化Otsu分割算法在計算過程中通過不斷比較類間方差,獲取優化的分割閾值,提升多粒度信息分割精度。具體流程如下:
輸入:待分割遙感影像I,閾值個數n
遙感影像除冗余:
利用PCA算法對輸入的多波段遙感影像進行降維,得到一副大小為M×N的新圖像Bnew,灰度級為L={1,2,…,i,…,l}
非線性優化Otsu分割過程:
IFn>2

則 計算結束;
ELSE IF

則 計算結束;
輸出:優化的分割閾值。
1.3 算法復雜性分析

2 實證分析
2.1 實驗數據
以浙江省舟山海域不同粒度的信息提取為例,驗證本文提出地基于改進Otsu的非線性優化遙感影像分割算法的可行性;并與傳統的Otsu、2D-Otsu、K-means、FCM分割算法進行精度對比。實驗數據為Landsat-8影像(7個波段),拍攝時間為2013年8月6日,范圍為從116°3′E到116°36′E,29°42′N到30°11′N。圖1所示為遙感影像中波段4、3、2合成圖像,大小為3 500×3 500個像素。

圖1 研究區域與實驗數據
圖2所示為基于目視解譯的不同粒度海島地物類別分布圖,圖2(a)為粗粒度下舟山海島岸線圖,地物類別為海水和島嶼;圖2(b)為細粒度下舟山海島地物類別分布圖,將島嶼細分割為:植被、人造建筑物和耕地;將海水粗分割為深海和淺灘。表1為不同粒度下地物類別的面積統計信息。

圖2 基于目視解譯的不同粒度海島地物類別分布圖
本文將目視解譯的不同粒度海島地物類別面積和空間分布視為“真值”,對基于不同分割算法的海島地物類別信息進行精度比較。
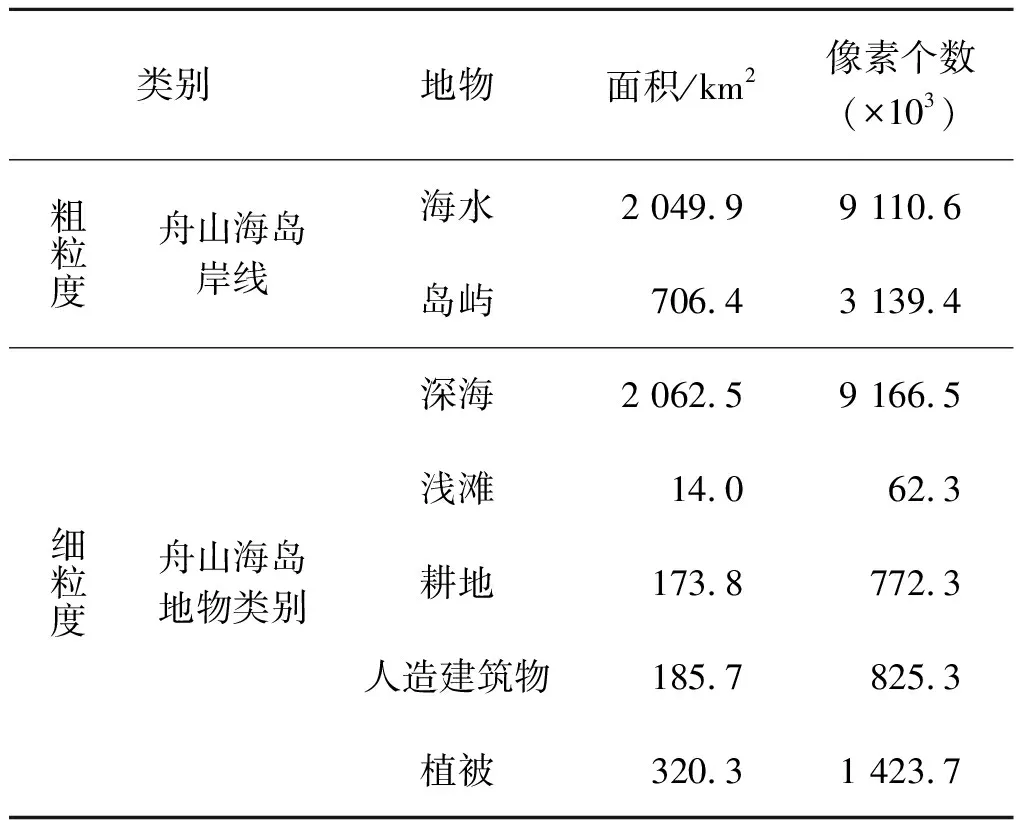
表1 基于目視解譯的不同粒度海島地物類別面積統計
2.2 基于不同分割算法的海島地物類別提取結果的精度比較
本文設計了2個實驗,通過對非線性優化Otsu分割算法與Otsu、2D-Otsu、K-means、FCM 4個分割算法對比,從分割精度和時間效率2個方面對非線性優化Otsu分割算法進行了可行性比較。基于原始遙感數據,驗證非線性優化Otsu分割算法用于不同粒度海島地物類別信息提取的精度優勢。另外,基于遙感影像降維后數據,驗證非線性優化Otsu算法用于不同粒度海島地物類別信息提取的時間效率優勢。實驗環境為:Windows 10專業版,Intel(R) Core(TM) i5-6500 CPU @3.20 GHz,RAM 4.00 GB,MATLAB R2013a。
1)基于原始遙感影像的不同粒度海島地物類別分割對比實驗。
(1)基于不同分割算法的粗粒度海島地物類別分割。將Landsat-8影像的各波段視為傳統獨立圖像,采用非線性優化Otsu分割算法和Otsu,2D-Otsu,K-means,FCM分割算法對海島地物類別進行了粗粒度分割,地物類別為海水和島嶼。圖3所示為基于遙感影像的各波段,利用不同分割算法實現粗粒度下海島地物類別的提取結果的空間分布圖。
由圖3可以看出:①不同波段的分割結果表現出較大的差異性;②非線性優化Otsu分割算法與Otsu、2D-Otsu在第1、2、3、4波段中的粗粒度海島地物類別分割提取結果具有相似性;③非線性優化Otsu分割算法在第5、6、7波段中的粗粒度海島地物類別分割提取結果具有相似性;④K-means算法在第2、3、4波段上較難實現粗粒度海島地物類別的提取,在第1、7波段上提取的粗粒度海島地物類別與其他方法相比,具有較大的差異性,在第5、6波段上較清晰地實現了粗粒度海島地物類別提取;⑤FCM算法在第1、2、3、4波段上提取的粗粒度海島地物類別效果較差,在第5、6、7波段上較清晰地實現了粗粒度海島地物類別的提取。由結果可以看出,面向粗粒度的海島地物類別,遙感影像各波段間不僅表現出了較大的信息冗余性,亦表現出較大的差異性。
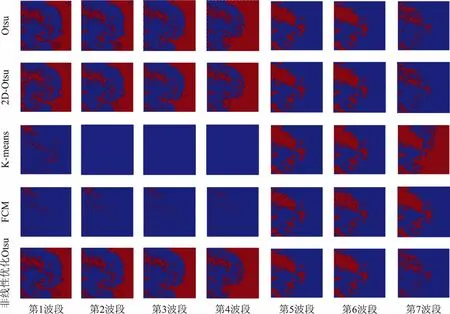
圖3 基于各波段影像的不同分割算法下粗粒度海島地物類別空間分布圖
(2)非線性優化Otsu分割算法在細粒度海島地物類別提取中的應用。利用非線性優化Otsu分割算法對各波段進行逐步地細粒度海島地物類別分割。圖4所示為不同粒度下海島地物類別空間分布圖。其中,第1行表示將該海域分割為兩類地物類別,即海水與島嶼;第2行表示將該海域分割為三類地物類別,即深海、淺灘與植被;第3行表示將該海域分割為四類地物類別,即深海、淺灘、植被與人工建造物;第4行表示將該海域分割為五類地物類別,即深海、淺灘、植被、人工建造物與耕地。
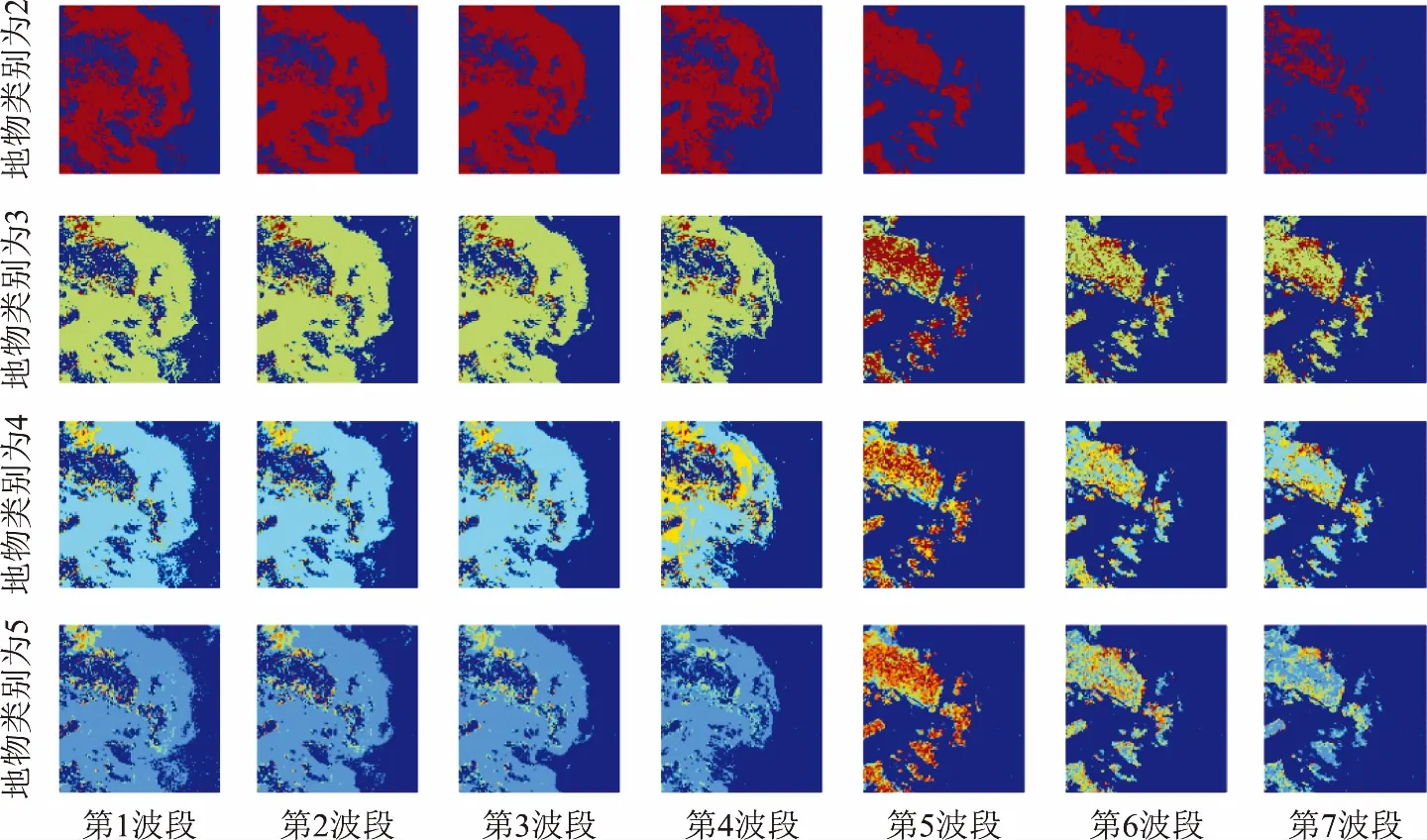
圖4 基于改進Otsu算法各波段細粒度海島地物類別空間分布圖
由圖4可以看出:①第1、2、3、4波段間存在較大的信息冗余,第5、6、7波段間存在較大的信息冗余;②基于第1、2、3、4波段的地物類別提取效果較差;③不同的波段對地物類別的提取具有不同的辨別力,如第5、6、7波段對海與島嶼具有較好的辨別力;④第5波段對植被、人造建筑物、深海、淺灘和耕地具有較好的辨別力。
2)面向降維影像的不同粒度海島地物類別提取對比試驗。利用PCA降維算法構建用于不同粒度海島地物類別提取的新圖像,采用非線性優化Otsu分割算法和Otsu、2D-Otsu、K-means、FCM算法對海島地物類別分割結果進行比較。
(1)基于降維后新影像的粗粒度海島地物類別提取對比試驗。采用非線性優化Otsu分割算法和Otsu、2D-Otsu、k-means、FCM算法對海島地物類別進行了粗粒度分割,地物類別為海水和島嶼。圖5所示為基于降維后新影像的粗粒度海島地物類別的空間分布;圖6為不同分割方法的時間效率對比圖;表2列出了粗粒度海島地物面積數據。
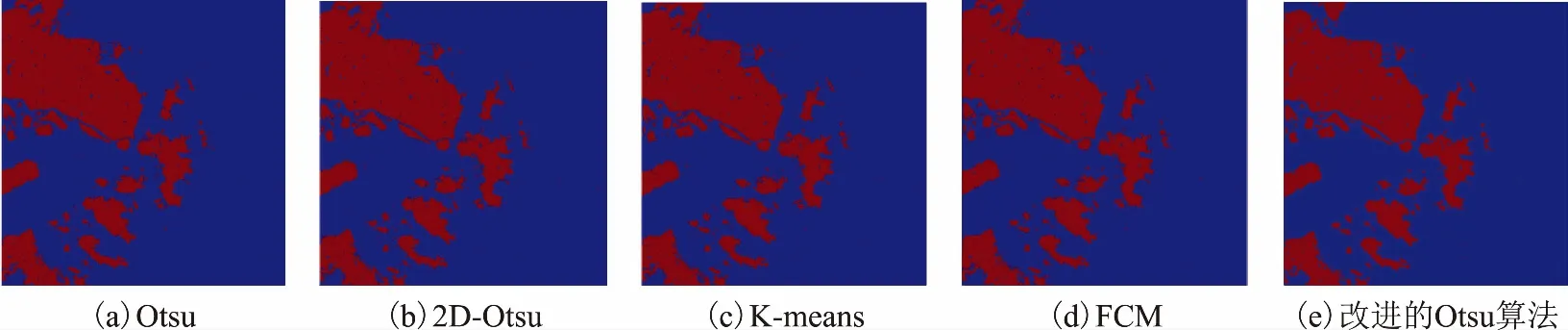
圖5 基于降維后的新影像的粗粒度海島地物類別空間分布圖
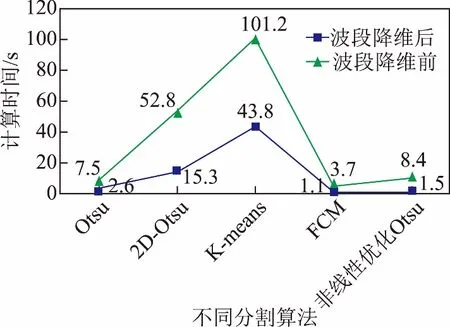
圖6 基于圖像降維前后不同分割算法的時間對比
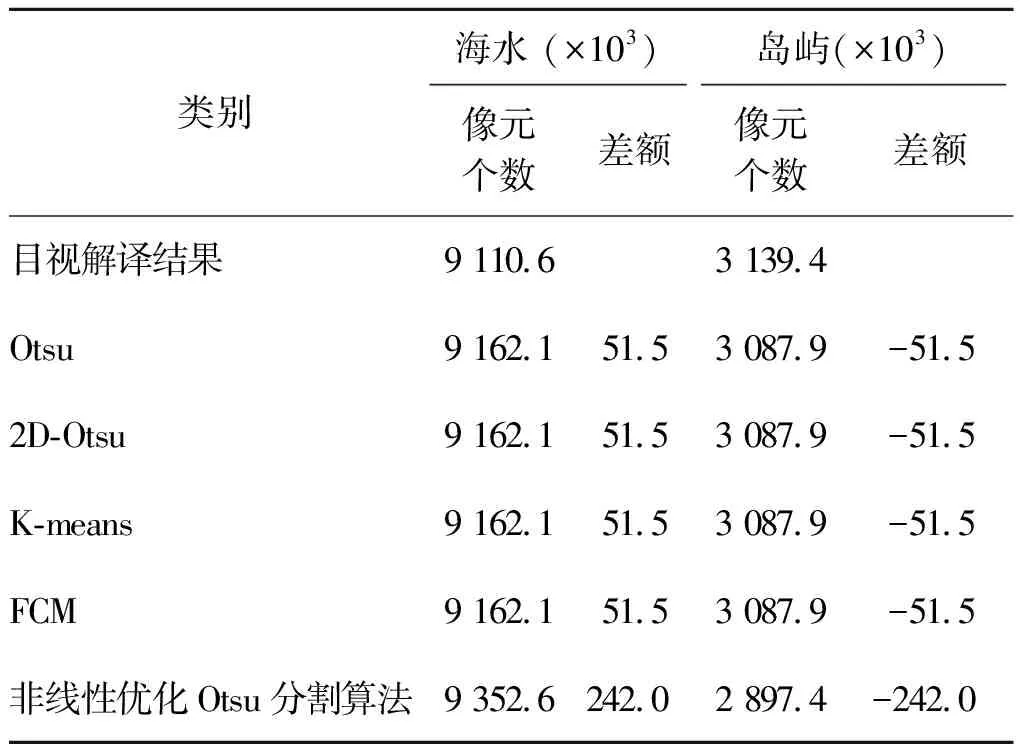
表2 基于降維后新影像的粗粒度海島地物面積對比像素
圖5所示為基于降維后新影像的粗粒度海島地物類別分割結果,由圖5、圖6和表2可以看出:①不同算法下,分割結果相似;②Otsu、2D-Otsu、FCM和K-means方法分割結果一致,非線性優化Otsu分割算法錯分面積較大;③與圖2(a)進行對比,其中Otsu、2D-Otsu、K-means和FCM算法將部分云錯分為島嶼,而非線性優化Otsu分割算法結果受到云的影響較小,分割較為準確;④在圖像降維后,FCM算法計算時間最短,非線性優化Otsu分割算法次之,K-means算法計算時間最長;⑤圖像降維前后時間對比,非線性優化Otsu算法在波段降維后,時間效率提高了82.1%。由結果可以看出,基于降維后新影像的粗粒度海島地物類別分割,非線性優化Otsu分割算法在分割精度與時間效率上優于其他算法,得到了較好的分割結果。
(2)基于降維后新影像的細粒度海島地物類別提取對比試驗。利用非線性優化Otsu分割算法對降維后新影像進行逐步地細粒度海島地物類別分割提取。圖7為基于降維后新影像的細粒度海島地物類別分布圖。圖7所示為基于降維后新影像的細粒度海島地物類別分割結果;圖8為不同分割方法的時間效率對比圖;表3列出了細粒度海島地物類別面積數據。
圖7所示為基于降維后新影像的細粒度海島地物類別分割結果。由圖7、圖8和表3可以看出:
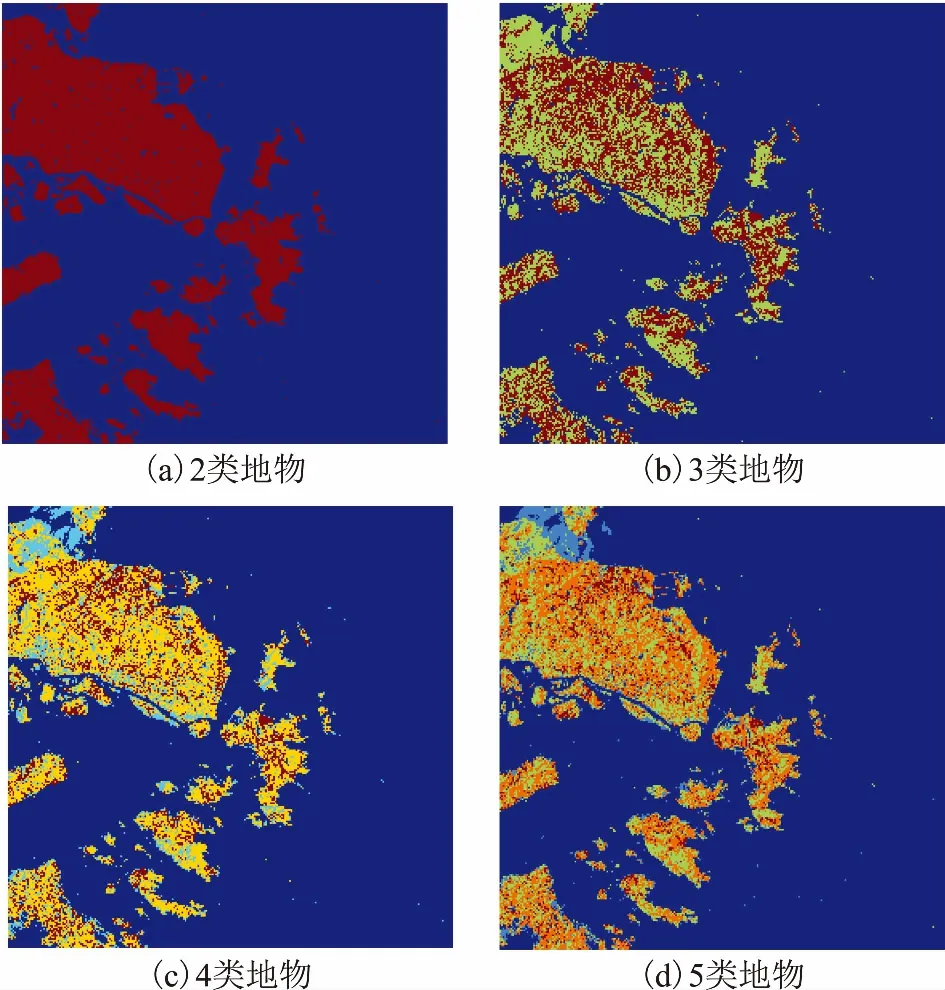
圖7 基于降維后新影像的細粒度海島地物類別分布圖

圖8 基于降維后新影像的不同分割粒度時間對比
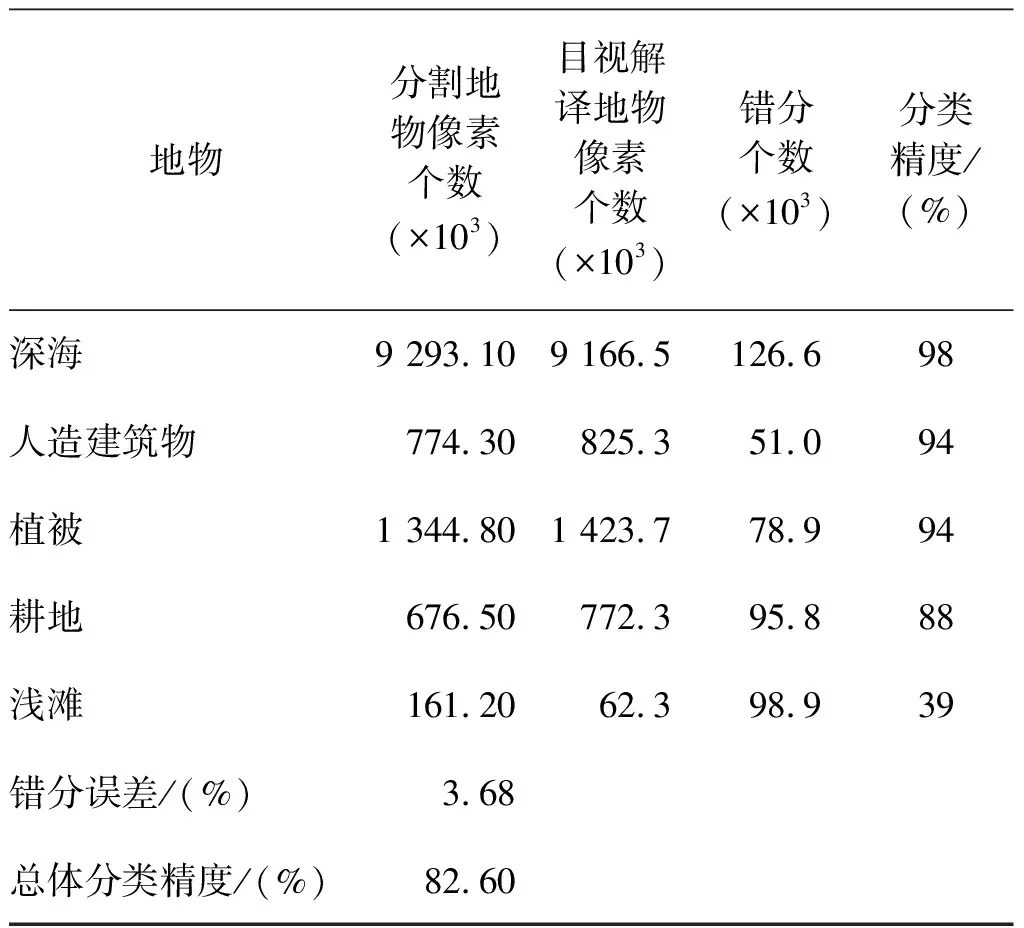
表3 基于降維后新影像的細粒度海島地物類別面積比較像素
①圖7(a)所示為海水與島嶼的分割結果,圖7(b)所示為深海、淺灘與植被的分割結果,圖7(c)所示為深海、淺灘、植被與人工建造物的分割結果,圖7(d)所示為深海、淺灘、植被、人工建造物與耕地的分割結果;②隨著分割地物類別的增加,計算時間不斷增長,但是計算時間增長趨勢較為緩慢;③改進的Otsu算法與目視解譯結果具有類似的分割結果,總體分類精度達到82.6%,其中深海的分割精度最高為98%,淺灘的分割精度最低為39%,錯分誤差為3.68%。由結果可以看出,基于降維后新影像的細粒度海島地物類別分割,非線性優化Otsu分割算法能夠有效地分割不同地物。
3 結束語
遙感影像的多粒度分割,能夠有效地得到豐富的遙感影像空間內容。本文改進了傳統的Otsu算法,基于PCA算法對遙感影像進行降維,得到的新影像為改進的Otsu算法的數據輸入,另外構建了非線性優化Otsu分割算法,同時利用總方差替代類間方差求解閾值,提高了圖像分割的計算效率及精度。
結果表明,相比Otsu算法,本文提出的非線性優化Otsu分割算法時間效率提高了59.88%;總體分類精度達到82.6%。非線性優化Otsu分割算法兼顧了錯分誤差和計算時間,對于遙感影像的信息提取中具有較好的分割效果。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
