KCCA與SVM算法支撐下的遙感影像變化檢測
2019-03-22 01:38:06董岳王飛
遙感信息 2019年1期
董岳,王飛
(山東科技大學 礦業與安全工程學院,山東 青島 266590)
0 引言
變化檢測是從不同時刻針對同一地區所獲得的遙感影像分析,確定各種地物隨時間的變化過程,其實質是地物變化引起地表波譜反射特征的變化,進而導致像元光譜響應的變化[1-3]。隨著遙感和信息技術的發展,變化檢測已經在不同領域得到廣泛應用[4-5]。
現有的方法中如何構造差異影像,并依據差異影像選取變化閾值是變化檢測信息提取過程中的兩大難點問題。多光譜遙感影像各個波段數據間存在的相關性與冗余性影響變化算法的效率與精度,同時給構造差異影像帶來一定的困難。常見的變化檢測方法如簡單的算術運算法(影像差值、影像比值)、變化矢量分析法(change vector analysis,CVA)[6]等通過各波段簡單的算術運算,構造影像間的差異,缺少多波段影像間相關性的處理;利用主成分分析(principal component analysis,PCA)[7-8]、偏最小二乘算法(partial least square,PLS)[9]、多變量變化檢測算法(multivariate alternative detection,MAD)[10]提取多波段影像間不相關成分,在變化檢測領域有廣泛的應用,但是這些統計算法得到的相關因子是前后時期多元變量的線性組合,實現了變量間的去相關處理。但是由于遙感影像的成像周期性,在這期間的地表反射率、傳感器等人為不可控因素的變化,不可避免地發生非線性變化的問題。對于變化閾值的設定,傳統的影像分割方法如直方圖曲率分析、最大類間方差自動分割等不能取得良好的效果,而基于BP (back propagation)-神經網絡分類[11]監督分類方法存在訓練數據結果不穩定的固有缺陷,會降低整體檢測精度。針對這些問題,本文提出一種結合核典型相關分析和支持向量機的遙感影像變化檢測方法。引入核典型相關分析法能夠提取非線性變換后多波段影像不相關的成分,有效地突出和集中前、后時相影像的差異信息,并去除冗余信息,再依據對應分量的差值的絕對值構造差異影像。基于監督型的支持向量機變化檢測方法能夠有效地訓練多維數據和變化信息提取,減少常規方法中訓練數據結果的不確定性,提高變化檢測的效率與精度。采用形態學算子對分類結果后處理,去除變化影像的椒鹽噪聲,能夠獲取更接近實況的變化影像。
1 基本原理
1.1 核典型相關分析算法
為了解決傳統方法應用于多光譜遙感影像變化的不足,丹麥學者Nielsen等提出了多元變化檢測方法。基本思想是基于典型的相關分析方法,對于不同時相的兩幅影像分別具有p和q個通道的影像X=[x1…xp]T和Y=[y1…yq]T,假設p≤q,且各通道的均值為零,分別構造兩個線性組合[2]:
U=αTX=α1x1+…αpxp
(1)
V=βTY=β1y1+…βpyq
(2)
兩時期的遙感影像X=[x1,…,xp]和Y=[y1,…,yp],U和V為兩時期的典型變量,p、q表示遙感的波段數,α和β分別為X、Y典型變換系數。在U和V正相關以及αTX與βTY為單位方差的限制條件
(3)
根據變量和方差的計算公式,在單位方差限制下,得:
Var{αTX-βTY}=Var{αTX}-Var{βTY}-
2Cor{αTX,βTY}=2(1-Corr{αTX,βTY})
(4)
兩時期的聯合隨機向量(U,V)均具有零均值,他們的協方差矩陣可以表示為:
(5)
則Var{αTX}=αT∑xxα,Var{βTY}=βT∑yyβ和Corr{αTX,βTY}=αT∑xyβ。這樣U,V的相關系數最小問題就轉化成了一個優化解決問題:

(6)

為了解決低維空間數據線性不可分的問題,通過采用核函數技術實現非線性映射到高維特征空間則可能實現線性可分的問題。根據核再生理論知,存在n維矢量φ和ψ,使得:
U=φTαTX
(7)
V=ψTβT
(8)
根據常用的核方法,定義一個核函數代替內積計算:
Kx(xi,xj)=Φx(xi)TΦx(xj)
(9)
Ky(yi,yj)=Φy(yi)TΦy(yj)
(10)
核矩陣定義如下:
(Kx)ij=kx(xi,xj)
(11)
(Ky)ij=ky(xi,xj)
(12)
公式(6)重新表達為:
(13)
其中:
對式(11)求偏導并令其等于0,得到:
MTβ=λPαMTα=λPβ
(14)
進而求得相關系數Corr{αTX,βTY}。
KMAD方法與MAD方法的思想是一致的,只是考慮到低維數據線性不可分問題,將原始數據通過核理論映射到高維空間,在高維空間進行典型相關運算,實現數據的線性可分。
對于多光譜影像,由于地物的光譜信息比較豐富,經過KMAD變換后差異影像容易受到噪聲的干擾不易于變化閾值的提取。為了解決變化信息的可分性和集中程度低的問題,本文采用最小噪聲變換,分離噪聲和變化信息,將KMAD變化的差異信息分配到互不相關的變量上。
1.2 SVM算法
支持向量機是建立在統計學習理論的VC維理論和結構風險最小原理基礎上的,根據少量的樣本信息在模型的復雜性和學習能力之間尋求最佳折衷,以期獲得最好的泛化能力[12]。該方法可以有效實現基于小樣本的高維非線性系統精確擬合,并采用結構風險最小原則,具有很好的推廣性[13]。
對于給定的訓練數據集D={(x1,y1),…(xl,yl)x∈Rn,y∈R},l為樣本數量,其中x為d維向量,y∈{-1,1}表示屬于哪個類別。線性回歸函數估計即利用訓練集D在線性函數集合中估計回歸函數:
f(x,a)=ωx+a
(15)
SVM算法采用結構風險最小化原則在約束條件式(17)下最小化泛函式(16):
(16)
(17)
根據拉格朗日乘子法,將尋求最優分類超平面問題轉化為凸二次規劃問題。
1.3 實現過程
本文算法流程如圖1所示。

圖1 變化檢測流程
結合KMAD和SVM變化檢測不是直接根據多光譜遙感影像樣本信息來確定超平面并進行二值分類,而是先用KMAD算法進行影像變換并構造差異影像,然后利用SVM分類器進行二值訓練,得到變化影像,具體步驟敘述如下:(1)采用KMAD算法進行多光譜非線性變換;(2)構建差異影像并采用Linear函數的SVM分類器提取變化檢測信息;(3)與PCA-SVM、PLS-SVM、MAD以及BP-神經網絡分類(BP-ANN)進行比較分析;(4)運用形態學算子,用類別集群的方法處理分類后的影像,獲得接近真實變化檢測影像。
2 結果與討論
2.1 研究區數據
本次試驗數據為鄭州新鄭市2015年和2017年的Landsat-8衛星OLI傳感器多光譜影像。影像大小為450像素×650像素,選取選擇可見光-近紅外7個波段(band1至band7)數據,影像空間分辨率均為30 m,該區域近幾年城鎮發展速度較快,新增道路和建筑區域較多。首先,對前、后時相的數據進行幾何配準,為滿足變化檢測要求,控制遙感影像的配準誤差不超過0.5像素;然后利用利用直方圖匹配方法,以2015年遙感影像作為參考影像,對2017年的遙感影像進行相對輻射矯正,較少輻射差異對實驗結果的影響。圖2(a)、圖2(b)為新鄭市區2015年及2017年Landsat-8 衛星OLI傳感器的標準假彩色合成影像,圖2(c)為目視解譯變化檢測結果。

圖2 OLI 5(Nir)4(R)3(G)標準假彩色合成影像
2.2 實驗分析
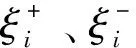
為了解決多光譜通道間的非線性變換關性,本文采用KMAD變換以兩時相影像對象各波段光譜值輸入值,輸出為KMAD的7個分量,由表1可知KMAD-1、KMAD-2、KMAD-3等信噪比和對比度值較大,而且典型相關系數小,說明前三分量影像的差異信息比較豐富。因此選擇KMAD-1、KMAD-2、KMAD-3為變化檢測的輸入變量。

表1 KMAD指標分析
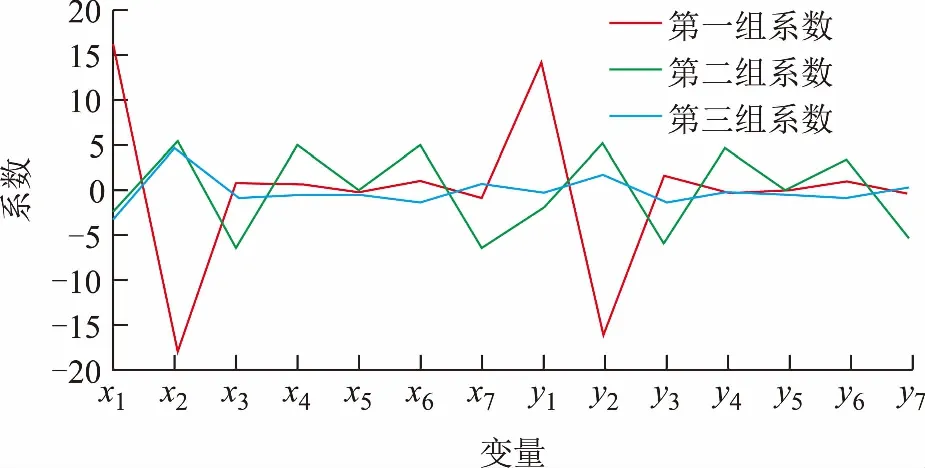
圖3 KMAD系數
影像經 KMAD變換后,選取前三個波段構造差異影像,圖4(a)為差異影像合成的假彩色影像。從中選取變化地物、非變化地物的部分樣本數據占試驗區數據總量的5.28%,選取樣本的原則為充分考慮變化地物與非變化地物的光譜結構與紋理特征,從而使選擇的樣本具有代表性。選用Linear函數的SVM分類器,其中懲罰系數C取100,實驗結果如圖4(b)所示。從檢測結果可以看出,本文算法能夠較好地檢測出耕地/荒地-建筑物、耕地/荒地-道路、耕地/荒地-道路-植被覆蓋等變化。對于農田變成荒地、草地以及農作物本身生長趨勢(覆蓋程度)的變化情況,由于影像光譜差異較小難以準確檢測出變化區域。

圖4 結合KMAD-SVM變化檢測結果
為了驗證KMAD算法結合SVM算法的有效性,將PCA-SVM、PLS-SVM、MAD以及BP-ANN同本文算法進行了比較。圖4、圖5中黑色表示非變化區域,白色表示變化區域;將提取結果與目視解譯結果進行比較,變化檢測精度評價方法采用正確率、誤檢率、以及漏檢率3個指標來表示。正確率是檢測結果和實際結果一致的像元占所有像元的比例,是檢測結果和實際結果一致的像元占所有像元的比例。虛檢率是實際未變化、檢測為變化的像元占檢測變化像元的比例;漏檢率是實際變化、檢測為未變化的像元占檢測未變化像元的比例;虛檢率、漏檢率越低,正確率越高,則變化檢測的效果越好。
從圖5(a)可以看出由于前后期影像的光譜差別較大,PCA-SVM方法的誤檢較多;圖5(b)、圖5(c)誤檢率都有所降低這是因為這兩種方法都對前后期影像進行線性變換;圖5(d)方法在機場附近漏檢現象較多。
表2給出了不同算法的變化檢測精度。從表2可知,本文提出的KMAD-SVM的變化檢測總精度最高。這是由于PCA沒有考慮兩幅影像間的相關性,對多時相影像相對輻射校正結果有較高要求;而PLS-SVM、MAD的方法考慮了前后期影像間的線性關系,但是當影像存在非線性變換時,提取結果較差。結合KMAD-SVM算法核典型相關分析,由于提取相關程度最大的成分,有效解決非線性變化的影響,將影像的變化信息集中到前幾分量中,提高了變化檢測正確率。另外,通過將SVM二值分類方法與BP-神經網絡(BP-ANN)分類進行比較分析進行對比,實驗結果顯示SVM取得更好的變化檢測效果,這是由于BP-ANN方法對訓練數據結果不穩定造成效果差。總之,KMAD-SVM算法可以很好地實現多光譜影像的變化檢測。
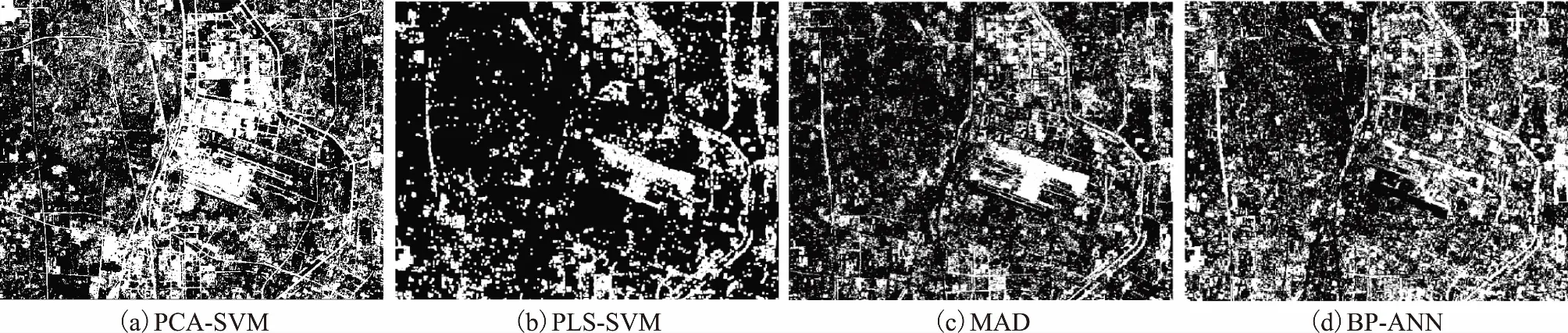
圖5 4種算法變化檢測結果
表2 變化檢測算法精度比較 %
基于像素的變化檢測結果往往存在斑點,即所謂的“椒鹽現象”,變化檢測結果整體比較碎。本文采用3×3形態學算子,以類別集群的方法對變化檢測結果進行處理后結果更加真實。從而達到去除“椒鹽現象”的目的。
3 結束語
本文在解決多時相影像間非線性變換的思路下,采用核函數對多光譜遙感影像的MAD算法進行改進;通過核典型相關分析變換;并根據KMAD的前三分量構造差異影像,采用SVM算法訓練變化檢測超平面,提取變化區域。通過實驗對比PCA-SVM、PLS-SVM、MAD、BP-ANN表明本文方法有效避免多時相非線性變換的影響,能夠較好地檢測出耕地變化為道路、建筑物、植被區域,相比傳統的變化檢測方法具有較高的正確率。但是本文對變化類別信息的判斷以及變化趨勢預測沒有涉及,這是需要進一步研究的內容。
猜你喜歡
音樂探索(2022年2期)2022-05-30 21:01:37
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
