面向滑坡的旋翼機(jī)正視/側(cè)視航攝處理與分析
2019-03-22 01:12:48陳元鵬王鳳李英成劉沛王恩泉
遙感信息 2019年1期
陳元鵬,王鳳,李英成,3,劉沛,王恩泉
(1.自然資源部國(guó)土整治中心,北京 100035;2.自然資源部航空遙感技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京100039;3.北京市低空遙感數(shù)據(jù)處理工程技術(shù)研究中心,北京100039)
0 引言
在我國(guó)滑坡作為一種多發(fā)性地質(zhì)災(zāi)害,給人民的生命和財(cái)產(chǎn)造成了嚴(yán)重的威脅。如近兩年發(fā)生的陜西山陽滑坡、深圳光明新區(qū)滑坡、四川茂縣滑坡等,造成的人員傷亡和經(jīng)濟(jì)損失慘重。有效監(jiān)測(cè)滑坡滑落趨勢(shì)、預(yù)估滑坡影響大小,需要更準(zhǔn)確的測(cè)量技術(shù)為滑坡監(jiān)測(cè)、預(yù)估提供基礎(chǔ)空間地理信息數(shù)據(jù)[1]。
目前滑坡監(jiān)測(cè)方法主要有大地測(cè)量法、近景攝影測(cè)量、GPS變形監(jiān)測(cè)等技術(shù)方法[2]:大地測(cè)量法一般采用水準(zhǔn)儀、全站儀、經(jīng)緯儀等高精度光學(xué)測(cè)量?jī)x器,通過測(cè)角和測(cè)距實(shí)現(xiàn)對(duì)滑坡的監(jiān)測(cè),該方法測(cè)量點(diǎn)位精度高,但受天氣和地形條件的影響,外業(yè)周期長(zhǎng)、人力成本高,不利于連續(xù)觀測(cè);近景攝影測(cè)量法是將數(shù)碼相機(jī)放在兩個(gè)不同位置的固定觀測(cè)點(diǎn),對(duì)滑坡攝影構(gòu)成立體像對(duì)進(jìn)而實(shí)現(xiàn)滑坡點(diǎn)三維坐標(biāo)量測(cè),該方法操作簡(jiǎn)單,精度較低,且由于滑坡坡面有傾斜,獲取影像分辨率不一致,影響后續(xù)分析精度;GPS變形監(jiān)測(cè)法是利用GPS衛(wèi)星信號(hào)進(jìn)行后方交會(huì)測(cè)量,求出待測(cè)點(diǎn)的三維坐標(biāo),然后用新值與初始坐標(biāo)之差反映待測(cè)點(diǎn)的運(yùn)動(dòng)[3],該方法簡(jiǎn)單、精度高,但易受地形影響。隨著無人機(jī)遙感系統(tǒng)的應(yīng)用推廣,利用無人機(jī)拍攝的照片所獲得的高程數(shù)字模型開展滑坡動(dòng)態(tài)分析已成為一種新的手段[4],然而滑坡坡度所導(dǎo)致的測(cè)圖分辨率不一致又成為影響后續(xù)數(shù)據(jù)分析的難題。為解決上述問題,本文提出了一種利用多旋翼無人機(jī)搭載平行于滑坡角度的傾斜單相機(jī)進(jìn)行變高航空攝影測(cè)量獲取滑坡地理信息數(shù)據(jù)的方法。該方法是在完成傳感器改造后,集成一套無人旋翼機(jī)正視/側(cè)視航空攝影測(cè)量遙感系統(tǒng),在四川滑坡地質(zhì)災(zāi)害點(diǎn)開展相關(guān)測(cè)試,按照航攝分區(qū)設(shè)計(jì)航線,在完成航空攝影后,開展數(shù)據(jù)處理與分析,形成一套完整的基于滑坡角度的無人旋翼機(jī)側(cè)視航空攝影測(cè)量解決方案。
1 側(cè)視相機(jī)安裝原理
進(jìn)行滑坡地質(zhì)災(zāi)害航空攝影時(shí),由于滑坡存在傾斜角度,會(huì)出現(xiàn)以下現(xiàn)象:相同航攝高度導(dǎo)致不同航線影像分辨率不一致,且隨著滑坡坡度的提升分辨率差異增大;即使同一條航線垂直拍攝,由于一張像片覆蓋的滑坡帶有傾斜角度也會(huì)存在單張影像分辨率不均勻。為驗(yàn)證該現(xiàn)象是否正確,本文從理論上進(jìn)行了驗(yàn)證,驗(yàn)證原理如下:
在以下計(jì)算中,設(shè)H為相對(duì)航高,f為相機(jī)焦距,GSD為單個(gè)像元分辨率,α為滑坡坡面相對(duì)于地平面角度,β為視場(chǎng)半角,μ為像元物理尺寸,γ為任意像元與其投影到地面點(diǎn)的連線與該像元所在的的行或列最邊緣的點(diǎn)與其投影到地面點(diǎn)的連線之間的夾角。
1.1 正視相機(jī)安裝
(1)投影到地面時(shí)地面分辨率計(jì)算。地面分辨率不變。正視相機(jī)安裝時(shí),如圖1所示,影像投影到地面時(shí)地面分辨率:
(1)

圖1 正視相機(jī)安裝投影到地面地面分辨率
(2)投影到坡面時(shí)地面分辨率計(jì)算。地面分辨率發(fā)生變化。正視相機(jī)安裝時(shí),如圖2所示,影像投影到坡面時(shí)地面分辨率:
(2)

圖2 正視相機(jī)安裝投影到坡面地面分辨率
結(jié)合公式(2)可計(jì)算正視相機(jī)安裝時(shí)單張影像覆蓋的斜坡面范圍:

(3)

(4)
式中:MN為覆蓋范圍長(zhǎng)邊;M′N′為覆蓋范圍短邊;tanβ=W×μ/2f;tanβ′=S×μ/2f;W為成像CCD的長(zhǎng)邊;S為成像CCD的短邊。由此可見其覆蓋范圍與斜坡不同位置有關(guān)。
1.2 側(cè)視相機(jī)安裝
(1)投影到地面時(shí)地面分辨率計(jì)算。地面分辨率變化。側(cè)視相機(jī)安裝時(shí),如圖3所示,影像投影到地面時(shí)地面分辨率:
(5)

圖3 側(cè)視相機(jī)安裝投影到地面地面分辨率計(jì)算
(2)投影到坡面時(shí)地面分辨率計(jì)算。地面分辨率不變。側(cè)視相機(jī)安裝時(shí),如圖4所示,地面分辨率:
(6)

圖4 側(cè)視相機(jī)安裝投影到坡面地面分辨率計(jì)算
由于焦距、像元尺寸以及航高為定值,因此地面分辨率不變。
側(cè)視相機(jī)安裝時(shí)單張影像覆蓋的斜坡面范圍:
(7)
(8)
式中:AB為斜坡面覆蓋范圍長(zhǎng)邊;A′B′為斜坡面短邊;W為成像CCD的長(zhǎng)邊;S為成像CCD的短邊。
通過以上原理分析可知,安裝側(cè)視相機(jī)時(shí)飛行投影到坡面的地面分辨率以及單張影像覆蓋的地面(坡面)均不變。
2 旋翼無人機(jī)航攝遙感系統(tǒng)集成
無人旋翼機(jī)航攝遙感系統(tǒng)主要有搭載平臺(tái)、傳感器以及飛行控制系統(tǒng)3個(gè)部分[5],根據(jù)攝區(qū)概況、航攝目標(biāo)以及航攝要求選取六旋翼無人機(jī)作為搭載平臺(tái),該平臺(tái)拆裝方便,對(duì)起降場(chǎng)地?zé)o特殊要求,且相對(duì)載荷大、重量輕、續(xù)航時(shí)間比較長(zhǎng)。
由于測(cè)區(qū)環(huán)境惡劣,儀器設(shè)備回收困難,因此傳感器選用價(jià)格相對(duì)低廉、測(cè)繪效果相對(duì)較好的索尼A7R相機(jī)。為減少飛行架次,對(duì)比分析正視/側(cè)視相機(jī)安裝對(duì)滑坡災(zāi)害體的數(shù)據(jù)獲取效果以及解譯情況,將兩臺(tái)相機(jī)固定在一起安裝于無人旋翼機(jī)遙感系統(tǒng)。在選定設(shè)備后首先進(jìn)行相機(jī)的檢校,而后根據(jù)航攝區(qū)域范圍以及測(cè)區(qū)滑坡的實(shí)際斜坡角度進(jìn)行傳感器的集成與改造,改造時(shí)為減輕重量采用鋁合金做成支架將兩臺(tái)相機(jī)(正視/側(cè)視)固定在一起,其中正視相機(jī)垂直安裝,傾斜相機(jī)按照滑坡角度進(jìn)行安裝,安裝后效果如圖5所示。

圖5 索尼A7R雙拼傳感器系統(tǒng)
3 試驗(yàn)與分析
3.1 測(cè)區(qū)概況
飛行測(cè)試區(qū)域位于四川省成都市龍泉山脈。該區(qū)域以山區(qū)為主,西端地勢(shì)高,海拔從510 m至700 m,高差約190 m,航攝面積約1.6 km2,滑坡角度大致為20°。試驗(yàn)區(qū)域四角點(diǎn)經(jīng)緯度坐標(biāo)依次為D1(30.553,104.271)、D2(30.552,104.287)、D3(30.539,104.287)、D4(30.540,104.270)。
3.2 控制點(diǎn)布測(cè)與質(zhì)檢
在布設(shè)地面控制點(diǎn)時(shí)應(yīng)考慮地形類別、成圖方法和成圖精度要求,此外還要考慮航攝比例尺對(duì)成像質(zhì)量的影響、測(cè)區(qū)地形地貌條件、儀器設(shè)備和技術(shù)條件以及內(nèi)外業(yè)任務(wù)的平衡情況等[6]。本次試驗(yàn)根據(jù)航攝區(qū)域情況以及航空攝影測(cè)量外業(yè)規(guī)范[7-8]要求,攝區(qū)共布設(shè)控制點(diǎn)23個(gè)。控制點(diǎn)選取遵循分布均勻,點(diǎn)位清晰,特征明顯,GPS信號(hào)充分的原則,在內(nèi)業(yè)完成選點(diǎn)后,交給外業(yè)人員,若實(shí)地信號(hào)不明顯或存在點(diǎn)位不清晰情況時(shí),可以根據(jù)實(shí)地情況實(shí)時(shí)調(diào)整點(diǎn)位情況。詳細(xì)點(diǎn)位布設(shè)以及實(shí)測(cè)點(diǎn)位情況詳見圖6、圖7、圖8。

圖6 控制點(diǎn)布設(shè)情況

圖7 刺點(diǎn)片

圖8 實(shí)地照片
在完成控制點(diǎn)野外GPS數(shù)據(jù)采集后,利用GPS數(shù)據(jù)質(zhì)量檢查軟件“TEQC”后,證明數(shù)據(jù)利用率為99%,利用率較高,多路徑誤差(L1、L2)分別為0.19和0.18,誤差比較小,觀測(cè)數(shù)據(jù)與周跳比為58 169,反映出周跳修復(fù)能力比較強(qiáng),證明該套數(shù)據(jù)可靠,而后利用商用軟件GAMIT完成GPS數(shù)據(jù)解算得到所有控制點(diǎn)的坐標(biāo)。
3.3 航線設(shè)計(jì)、數(shù)據(jù)獲取與質(zhì)量檢查
實(shí)驗(yàn)利用第3節(jié)集成的旋翼無人機(jī)航攝遙感系統(tǒng),設(shè)計(jì)飛行一個(gè)架次同時(shí)獲取兩類不同數(shù)據(jù)(正視/側(cè)視),本次設(shè)計(jì)六條航線,采取變高飛行方式,在第一條航線飛行完成后,爬高到預(yù)定高度從而進(jìn)行第二條航線飛行,飛行示意圖如圖9所示。
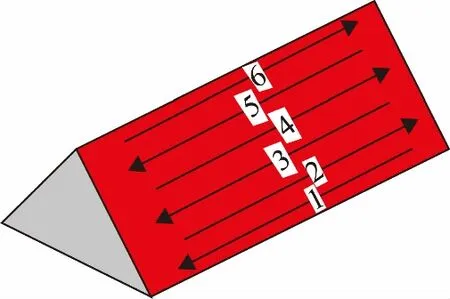
圖9 航線示意圖
若像元大小μ、傳感器焦距f、設(shè)計(jì)地面分辨率GSD、航向重疊度m、計(jì)算出相對(duì)航高H、基線長(zhǎng)度S1、曝光點(diǎn)間隔T(相機(jī)航向像元x個(gè)、旁向像元y個(gè)),則相對(duì)航高以及基線長(zhǎng)度滿足公式(9):
(9)
在圖10中,S為航線間隔,L1表示第一條航線,L2表示第二條航線,H表示側(cè)視安裝相機(jī)相對(duì)于傾斜面的相對(duì)航高,S2表示航線沿垂直飛行方向向上移動(dòng)的距離,Δh表示L1航線與L2航線相對(duì)水平面高差,α表示滑坡傾角,則航線移動(dòng)距離S2以及爬升高度Δh分別計(jì)算如下:
S2=S×cosα,Δh=S×sinα
(10)

圖10 側(cè)視安裝相機(jī)飛行參數(shù)計(jì)算
通過本次飛行設(shè)計(jì)正視/側(cè)視安裝相機(jī)分別獲取影像189張,圖11、圖12為兩張影像在飛機(jī)飛行到同一位置時(shí)刻的曝光影像。

圖11 正視安裝相機(jī)獲取影像

圖12 側(cè)視安裝相機(jī)獲取影像
通過檢查獲取的無人機(jī)遙感原始影像,發(fā)現(xiàn)影像航向、旁向重疊度以及影像質(zhì)量能夠滿足成圖要求。
3.4 數(shù)據(jù)處理
1)控制點(diǎn)數(shù)據(jù)處理。由于獲取的外業(yè)控制點(diǎn)均為WGS84坐標(biāo)系下的坐標(biāo),其基準(zhǔn)面為參考橢球面[9],在進(jìn)行正視安裝相機(jī)DOM生產(chǎn)時(shí),不需要進(jìn)行坐標(biāo)轉(zhuǎn)換,若進(jìn)行側(cè)視安裝相機(jī)投影到滑坡投影面DOM生產(chǎn)時(shí),必須進(jìn)行控制點(diǎn)的坐標(biāo)轉(zhuǎn)換。
根據(jù)選擇的滑坡投影面(定義一個(gè)局部坐標(biāo)系)將所有的控制點(diǎn)(如有)坐標(biāo)投影到滑坡面上,同時(shí)將輔助用的所有GPS點(diǎn)坐標(biāo)投影到滑坡面上。轉(zhuǎn)換方式如下:
首先根據(jù)設(shè)計(jì)的航線即曝光點(diǎn)位置確定轉(zhuǎn)換后坐標(biāo)系的原點(diǎn)為1號(hào)曝光點(diǎn),因此坐標(biāo)轉(zhuǎn)換共需要3步:首先將原始坐標(biāo)系原點(diǎn)移動(dòng)至1號(hào)曝光點(diǎn)位置;其次將移動(dòng)后的坐標(biāo)系繞Z軸旋轉(zhuǎn)belta角(該角度計(jì)算方法為航線的飛行方向即根據(jù)每條航線飛行的角度計(jì)算),最后將旋轉(zhuǎn)后的坐標(biāo)系旋轉(zhuǎn)alpha角(該角度計(jì)算方法為相機(jī)相對(duì)于正視相機(jī)的安裝角度)。
若點(diǎn)A在WGS-84坐標(biāo)系中的坐標(biāo)為(X,Y,Z),該點(diǎn)A在轉(zhuǎn)換后坐標(biāo)系中的坐標(biāo)為(X’,Y’,Z’),因此二者之間轉(zhuǎn)換如圖13、圖14、圖15所示。

圖13 坐標(biāo)原點(diǎn)移動(dòng)

圖14 繞Z軸旋轉(zhuǎn)belta角度

圖15 繞X軸旋轉(zhuǎn)alpha角度
根據(jù)以上移動(dòng)旋轉(zhuǎn)關(guān)系得出兩坐標(biāo)系之間的轉(zhuǎn)換關(guān)系如下公式求解[10]:
(11)
通過上述轉(zhuǎn)換關(guān)系編程實(shí)現(xiàn)所有控制點(diǎn)數(shù)據(jù)的投影變換。
2)影像數(shù)據(jù)處理。將正視安裝相機(jī)導(dǎo)出的影像數(shù)據(jù)、POS數(shù)據(jù)以及測(cè)量控制點(diǎn)坐標(biāo)導(dǎo)入軟件進(jìn)行處理,最終生成DOM。將側(cè)視安裝相機(jī)導(dǎo)出的影像數(shù)據(jù)投影變換過的POS數(shù)據(jù)以及投影變換的控制點(diǎn)導(dǎo)入軟件進(jìn)行處理,最后生成投影到滑坡面上的DOM。參見圖16、圖17。

圖16 正視處理效果圖

圖17 側(cè)視處理效果圖
3.5 試驗(yàn)結(jié)果與分析
1)正視成圖數(shù)據(jù)精度分析。根據(jù)數(shù)據(jù)處理結(jié)果可知,正視飛行時(shí)成圖面積1.6 km2,常規(guī)成圖如圖18所示。

圖18 正視情況下DOM、DEM暈渲圖
正視情況下成圖精度點(diǎn)位誤差表格如表1、表2所示。

表1 常規(guī)情況下控制點(diǎn)點(diǎn)位誤差統(tǒng)計(jì)表

表2 檢查點(diǎn)點(diǎn)位誤差統(tǒng)計(jì)表
從以上2個(gè)表格可以看出,正視常規(guī)成圖情況,控制點(diǎn)平面最大誤差為0.613 3 m,高程最大中誤差為0.593 3 m。符合低空空三規(guī)范[11]中1∶1 000山地定向點(diǎn)平面/高程限差不大于0.8/0.6 m的要求。檢查點(diǎn)最大平面誤差為0.382 m,高程中誤差為-0.431 5 m,符合低空空三規(guī)范中1∶1 000山地檢查點(diǎn)平面/高程限差不大于1.4/1.0 m的要求。
2)側(cè)視成圖數(shù)據(jù)精度分析。根據(jù)數(shù)據(jù)處理結(jié)果可知,側(cè)視飛行時(shí)成圖面積1.9 km2,大于正視成圖。成圖如圖19所示。
側(cè)視情況下DOM、DEM暈渲圖如圖20所示,側(cè)視成圖精度點(diǎn)位誤差表格如表3、表4所示,側(cè)視成圖如圖21所示。

圖19 正視情況下常規(guī)成圖控制點(diǎn)/檢查點(diǎn)精度分析圖

圖20 側(cè)視情況下DOM、DEM暈渲圖

序號(hào)X誤差/mY誤差/mZ誤差/mError/m平面/m2-0.123 1-0.005 8-0.016 70.124 40.123 24-0.057 60.094 5-0.020 20.112 50.110 66-0.150 0-0.081 80.052 90.178 90.170 980.313 0-0.369 1-0.141 70.504 30.484 010-0.222 10.001 20.121 10.253 00.222 1120.016 40.024 6-0.022 80.037 30.029 513-0.156 0-0.124 3-0.005 90.199 50.199 416-0.207 6-0.095 50.006 60.228 70.228 617-0.187 2-0.035 1-0.032 90.193 30.190 5180.013 80.067 60.197 20.208 90.069 019-0.105 20.111 2-0.008 10.153 30.153 1200.000 00.100 8-0.040 20.108 50.100 821-0.011 10.319 9-0.057 30.325 20.320 1220.547 00.174 1-0.040 00.575 50.574 1230.111 10.530 60.325 60.632 30.542 1標(biāo)準(zhǔn)偏差0.208 90.204 50.114 80.178 10.170 8標(biāo)準(zhǔn)誤差0.053 90.052 80.029 60.046 00.044 1平均值 -0.014 60.047 50.021 20.255 70.234 5

表4 側(cè)視情況下檢查點(diǎn)點(diǎn)位誤差統(tǒng)計(jì)表

圖21 側(cè)視情況下成圖控制點(diǎn)/檢查點(diǎn)精度分析圖
從以上2個(gè)表格可以看出,側(cè)視常規(guī)成圖情況,控制點(diǎn)平面最大誤差為0.574 1 m,高程最大中誤差為0.325 6 m。符合低空空三規(guī)范中1∶1 000山地定向點(diǎn)平面/高程限差不大于0.8/0.6 m的要求。檢查點(diǎn)最大平面誤差為1.275 1 m,高程中誤差為-0.906 8 m,符合低空空三規(guī)范中1∶1 000山地檢查點(diǎn)平面/高程限差不大于1.4/1.0 m的要求。
3)正視/側(cè)視影像目標(biāo)體解譯。在圖22中,左面為正視成圖,右面為傾斜成圖,從以下截圖能夠明顯看出,傾斜成圖對(duì)目標(biāo)體而言成像更為清晰,更有助于目視解譯。
在完成四川省成都市的滑坡災(zāi)害體試驗(yàn)后,為進(jìn)一步驗(yàn)證本文的方法,在新疆新源縣展開了1 km2測(cè)區(qū)左右的滑坡正視/側(cè)視數(shù)據(jù)分析與試驗(yàn),其解譯結(jié)果如圖23所示。

圖22 正視/側(cè)視成圖目標(biāo)體解譯對(duì)比分析圖

圖23 側(cè)視/正視成圖滑坡體解譯對(duì)比分析圖
4 結(jié)束語
本文在對(duì)存在傾斜角度的滑坡體正視/側(cè)視航空攝影對(duì)地面分辨率影響深入分析的基礎(chǔ)上,為減少飛行架次以及其他影響對(duì)比分析結(jié)果的因素,順利完成對(duì)比試驗(yàn),采用鋁合金結(jié)構(gòu)對(duì)兩臺(tái)相同傳感器進(jìn)行集成安裝為雙拼傳感器系統(tǒng),集成的該雙拼傳感器系統(tǒng)在一個(gè)傳感器正視攝影情況下另一個(gè)平行于滑坡角度,而后將該雙拼傳感器系統(tǒng)安裝與六旋翼無人機(jī)遙感系統(tǒng)。在完成裝備集成的情況下,利用該裝備在四川滑坡地質(zhì)災(zāi)害點(diǎn)開展相關(guān)試驗(yàn)。
試驗(yàn)證明,按照滑坡角度安裝相機(jī)、并且按照航線分區(qū)開展針對(duì)滑坡體的航空攝影測(cè)量,數(shù)據(jù)處理時(shí)將側(cè)視飛行獲取的影像投影到坡面生成DOM,更有利于分辨率一致,同時(shí)針對(duì)傾斜測(cè)量目標(biāo)能夠減小正視航攝影像信息量少,細(xì)節(jié)損失嚴(yán)重的現(xiàn)象;另外本次試驗(yàn)正視成圖覆蓋面積1.6 km2,側(cè)視成圖覆蓋面積1.9 km2,結(jié)果表明對(duì)于滑坡地災(zāi)點(diǎn),傾平行于滑坡角度成圖在同等架次同等航線情況下覆蓋面積更大。
本文通過原理分析與試驗(yàn)驗(yàn)證了旋翼機(jī)按航線分區(qū)、平行于被攝目標(biāo)傾斜角度開展航空攝影對(duì)于滑坡災(zāi)情分析的可行性與有效性,但由于時(shí)間以及數(shù)據(jù)量問題,未能分析滑坡體量,下一步將開展多次試驗(yàn),同時(shí)分析滑坡體量用于進(jìn)一步驗(yàn)證該方法與理論的正確性。
