新型設計理念下的海角鰹鳥三棲無人機概念設計
2019-03-22 06:30:28吳燕萍
長沙航空職業技術學院學報 2019年1期
吳燕萍
(航空工業陜西飛機工業集團有限公司設計研究院,陜西 漢中 723213)
無人機是一種由動力驅動、無人駕駛,可一次或重復使用的航空器,它是一種會飛的機器人。無人機在軍用、民用方面應用廣泛。與有人駕駛飛機相比,無人機具有續航能力強、經濟實用、無人員傷亡等獨特優勢。
1 無人機的發展需求
未來戰爭強調遠距離無接觸、高效性、低死亡率、低成本經濟性,無人機發展必須適應未來戰爭作戰體系的作戰需要[1]。無人機涉及的任務領域能逐步覆蓋所有有人駕駛飛機的任務領域,因此無人機有可能逐步代替有人駕駛飛機。
在過去漫長的歲月中無人機發展緩慢,直到近代幾次局部地區戰爭中無人機才嶄露頭角,逐步成為除有人駕駛飛機和導彈以外的另一類空中作戰武器。無人機直接用于作戰始于美軍入侵越南戰爭,后來又運用于中東、海灣、科索沃、阿富汗、伊拉克等幾次局部地區戰爭。可以看出無人機具有戰略、戰役和戰術偵察,監視戰場,目標探測、戰場毀傷評估、電子戰、中繼通信、邊境巡邏、反恐等能力,為部隊的作戰行動提供情報,并可直接參加戰斗,完成危險的、有人機無法完成的任務。
2 無人機的發展趨勢
從國外研制的無人機發展狀況,可以看出無人機呈現出以下發展趨勢。
2.1 無人機體積、動力及適應性發展趨勢
1)微小型、中型、大型化無人機井噴式發展。其中,微小型無人機是突出它靈巧性和隱身性,它能進入建筑物內部實施偵察,或在結構或設備上充當潛聽哨和視頻監視哨,用于偵察機和偵察衛星偵察不到的死角。中型無人機多為特種無人機,完成特定的任務,如巡邏、偵查、監視等。大型無人機是為了提高無人機的裝載和作戰能力,承擔如運輸、攻擊作戰等任務。
2)動力的發展
美國的核動力無人機“全球鷹”追求長航時,核動力用于無人機,使其滯空時間由以往的幾十小時提高到數月。新型核動力無人機除執行偵察任務外,還可裝備空地導彈,用于對地攻擊。該核動力無人機采用的核動力與傳統的裂變反應堆有所不同,它是由鉿-178提供能量。
美國的“太陽神”無人機是電驅動,該機白天利用太陽能,晚上利用燃料電池工作,被人認為是高空、超長航時無人機的先鋒,續航時間可達幾周或幾個月,不需要使用消耗性能源,不排放污染物。
英國“西風”無人機白天是利用太陽能,將其轉化為電能,驅動電動機或螺旋槳,不同的是,晚上不是利用燃料電池系統作為動力,而是將白天的剩余電能存儲在高效電池內,供晚上使用。
3)空中、陸地和水下適應性的發展
今天的無人機,除了天上飛的以外,已經發展到水里游的、陸上跑的,可以說無人機領域已無所不包、無所不在。一種無人機同時能在空中、陸地、水下不同的介質中生存,其隱身性、突擊性、攻擊性將在軍事中發揮重要作用,它就是現實世界中的百變金剛,在未來高技術戰爭中,沖鋒在第一線的不再是士兵們,而是在高空中盤旋、陸地水下伺機出擊的無人機機群。
2.2 自主性與人工智能化發展
自主控制飛機滑行、起飛、自主導航到達觀察區域。飛行過程中可以對任何威脅或意外事件作出反應。它可以想要的方式規劃觀察區域的航路、確定目標,利用傳感器系統向操控者發送一系列圖像和場景,以確定要打擊的目標。一旦授權其這樣做,它將自主的攻擊目標,規劃返航的航路,著陸并滑跑返回地。只需要輸入“做什么”,而不需要給出復雜指令,控制無人機“如何做”。其核心是發展類似人大腦的神經網絡或利用高速計算機算法模擬人腦的功能。
2.3 在軍事體系中的發展趨勢
無人機已經從原來的戰爭“配角”轉換成“主角”,作戰任務進一步拓展,從戰術級向戰役級和戰略級方向延伸,從執行支援保障性任務向執行攻擊性作戰任務方向延伸,使無人機成為名副其實的殺傷性平臺。無人機與無人機、無人機與有人機之間協同作戰,進一步增強了作戰能力,使無人機在軍事體系中發揮了更大的作用。
“未來作戰體系”中其核心部分是高科技機器人以及網絡化的指揮與控制系統。高科技機器人包括無人機、無人戰車、機器人士兵、無人水面水下航行器等[2]。無人智能作戰總體和有人操作作戰系統將構成一個龐大的作戰集體,只是在戰爭進程中或某一層面的具體使用和分配上的不同。無人智能作戰系統將承擔最危險、最頻繁、長時間、高強度的作戰任務。
3 海角鰹鳥三棲無人機概念設計
基于無人機發展趨勢及現狀[3],筆者提出了一種新型三棲無人機“海角鰹鳥”的設計構想。該無人機可一次性或重復使用,也可采用空中投放、海中投放和起降式三種起飛投放方式。
3.1 需求分析
無人機空中、陸地和水下適應性發展是無人機的發展趨勢之一,要求該種無人機具有三棲作戰能力,充分要體現無人機的隱身性、閃電攻擊性,它集無人機、無人戰車、無人水下航行器于一身,在軍事作戰體系中具有非常重要的作用。
3.2 功能任務定位
該無人機可搭載不同任務系統,可具有三棲偵察,監視,目標探測、通信、反潛(艦)、攻擊或自殺式攻擊、反恐等能力,為部隊的作戰行動提供情報,并可直接攻擊目標,完成危險、其它無人機及有人機無法完成的任務。
3.3 概念使用方式
空中使用。與其它無人機一致;
陸地使用。能在較平緩的道路行駛,有較好的機動性;
水中使用。該種無人機先在空中降低飛行高度,機翼收縮,減小升力,同時降低飛行速度,接近水面時,雙立尾收縮,螺旋槳葉順航向向后逐漸收角度,接觸水面入水,入水后下沉,可在水面、水下航行。從水面起飛時,該種無人機先上浮到達水面,機翼和雙立尾恢復到飛行狀態,水面滑行起飛。
3.4 概念設計
海角鰹鳥無人機機體主要包括機身、機翼、尾翼、發動機等部件。設計圖所用單位均為mm。海角鰹鳥無人機概念設計三面圖見圖1,水下概念設計三面圖見圖2。從三面圖及使用環境中可以看出:全機水密設計(見圖3),保證使用環境要求。機體外形根據氣動、流體力學設計,保證其空中、水下都具有較小的阻力外形,確保性能。機翼采用中單翼布局(見圖4),尾翼采用V型立尾形式。機身外形等直段為圓形,最大直徑為500 mm,前段與等值段光滑過渡,長細比為1.6。尾段外形與等值段光滑過渡,長細比為3.6,形成上翹式尾段,保證飛機擦地角度的要求。無人機整體采用正常式布局,外形一階、二階導數連續,外形光順,阻力小。

圖1 空中海角鰹鳥無人機概念設計三面構想圖

圖2 水中海角鰹鳥無人機概念設計三面構想圖
機身由26個整體框和若干長桁組成桁架式結構,結構材料采用金屬+新材料,保證飛行、陸地、水下的強度剛度要求,見圖5。機翼、雙立尾設計成伸縮式收放,采用形狀記憶合金智能材料,使機翼、雙立尾結構設計成為智能全動結構,一層一層打開,一層一層收起,見圖6。在水下工作時,機翼、立尾收起,形成一種類似于整流罩的形式,保證無人機外形相對光順,阻力較小,就像鰹鳥的翅膀一樣,收縮自如,上天可翱翔,入水可覓食。該無人機采用了前三點收放式起落架形式(一次性無起落架),前輪和主輪均采用向前收起形式。無人機機腹的任務艙有兩個,第一個在兩個起落架之間,第二個在主起落架之后,見圖7。無人機結構要求簡單、多路傳力,力求重量較輕。
動力系統發動機布置在無人機尾部,全機動力源為全電系統或核動力裝置,包括操縱系統、起落架等,來滿足無人機的戰術技術要求。
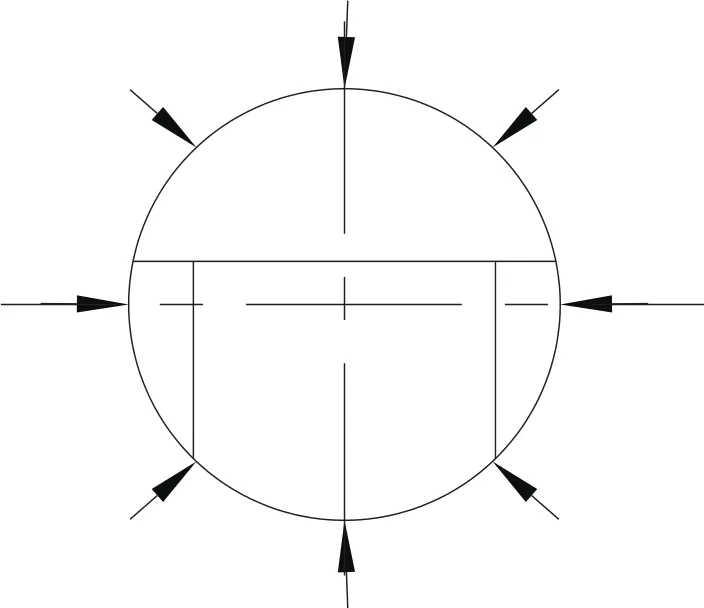
圖3 海角鰹鳥無人機水密線圖
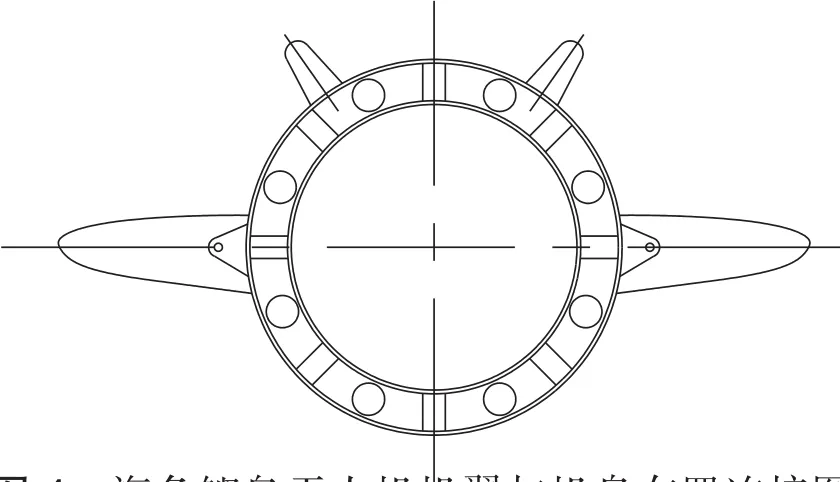
圖4 海角鰹鳥無人機機翼與機身布置連接圖

圖5 海角鰹鳥無人機概念設計框圖
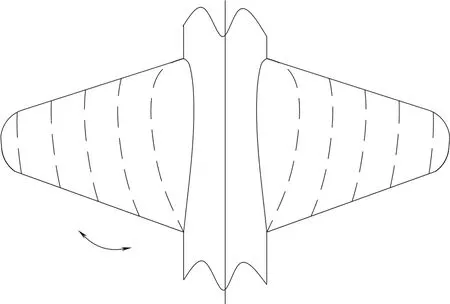
圖6 海角鰹鳥無人機記憶合金材料機翼展開圖

圖7 海角鰹鳥無人機任務艙圖
控制系統,采用自主性與人工智能化控制系統,只需要對無人機輸入要完成的具體任務,而不需要控制無人機如何做。采用先進高速計算機算法模擬人腦的功能進行自主智能控制。
該無人機綜合航電系統保證空/空、空/地、空/海(水下)間的語音和數據通信,完成自主導航、著陸、編隊集結、無人機與無人機、無人機與有人機之間協同作戰;信息識別和敵我識別等任務。水下采用慣性導航和聲吶導航,水面之上采用慣性導航和衛星導航。
任務系統采用通用化、標準化、模塊化、集成化設計,快速裝卸,實行多功能的任務要求。
其基本數據如下(用CATIA工程軟件初步估算):
機身長 約5.5 m
機高 約1 m
翼展 約2.7 m
直徑 約0.5 m
空機重量 約700 kg
最大起飛重量 約1100 kg
最大飛行速度(空中) 約(500~800) km/h
航時(核動力空中水下) 約1 M
實用升限(空中) 約10000 m
最大航深 約400 m
最高航速(核動力) 約90 kn
海角鰹鳥無人機能在海陸空根據任務的要求,搭載不同的任務系統,可以完成空中、水面上、水面下通信、中繼指揮、偵察搜索、監視、反潛(艦)、對敵攻擊等任務。其特點是多功能、環境適應性強、突擊性強、生存性強、隱身性強,成本低等。
4 結論
隨著人工智能系統、傳感技術、控制技術的快速發展,無人機將成為未來陸戰、海戰、空戰、天戰的“殺手锏”,海角鰹鳥作為一種三棲無人機,有望在未來的戰爭中發揮其獨特的作用。