無人機用于輸電線路巡檢的作業流程及應用
2019-03-25 11:49:34張思青
能源研究與信息 2019年4期
關鍵詞:作業
蘭 昊,米 珂,程 帥,張思青
(1.西安熱工研究院有限公司,陜西 西安 710032;2.昆明理工大學 冶金與能源工程學院,云南 昆明 650093)
隨著社會經濟的迅猛發展及城市化步伐不斷加快,各行各業對電力的需求越來越大,因此以超/特高壓輸電線路為主骨架的全國互聯大電網應運而生。然而,由于電網規模和電壓等級迅猛擴大,隨之而來的新的電網運行模式對超/特高壓輸電線路運行檢修技術提出了更高的要求。超/特高壓輸電線路電壓等級高、輸送距離遠、塔架較以往高且穿越地形比較復雜。為了掌握輸電線路的運行狀況以及時排除電力安全隱患,電力部門需投入大量人力、物力對輸電線路進行定期巡檢,并且有時由于復雜地形、極端天氣等人為不可控因素的影響在時間上更是存在捉襟見肘的尷尬局面[1]。目前對輸電線路巡檢主要采用地面人工周期巡檢。這種人工巡檢方法不僅工作量大且由于部分巡檢線路自然環境惡劣對巡檢人員的人身安全也造成了巨大的威脅,同時人工巡檢效率低,巡視周期長,巡視質量難以控制,且存在巡檢盲區,容易出現遺漏缺陷的現象。近年來隨著民用無人飛行器技術的發展,無人機的應用不斷進入新的領域,由于其優越的航拍性能將無人機應用于電力巡線已逐漸成為可能。
無人機是一個集航拍傳感器技術、飛行控制技術、無線通信遙控技術、無線圖像回傳技術、全球定位導航航拍技術、計算機編程技術等多技術并依托于硬件的高科技產物[2-3]。首先是其具有自動跟蹤識別的能力,目前其視覺識別技術已日趨成熟,可將其成功應用于日常電力巡檢,它就會根據所設定的巡檢線路識別點,實現無人自動巡檢。其次是智能避障能力,它能自動識別并躲開電線、電桿、塔架之類的障礙物,實現安全、平穩的飛行。這兩項技術的運用使無人機的智能水平大大地提高。
1 無人機巡檢發展現狀
依托自身先進的無人機技術發達國家最先將無人機應用于電力巡檢。目前,在該領域發達國家仍處于領先地位。相比于國內剛開始對無人機巡檢系統展開研究,發達國家已在關注后續的圖像、數據處理方面的研究。近年來,我國國家電網公司已組織相關科研人員開展無人機巡檢系統的研究, 目前已取得階段性的成果。研究人員針對輸電線路巡檢用的無人機系統進行了研究,討論了包括可見光探測、紅外探測和無線數據傳輸等問題;另外,有研究團隊以四旋翼飛行器作為輸電線路巡檢載體,以地面監控及圖像處理設備為支撐,形成輸電線路立體巡檢系統并已成功運行,該系統能夠實現線路缺陷的離線診斷,對缺陷的自主在線診斷正在研究之中[4-6]。
2 巡檢作業內容
目前,運用無人機進行輸電線路巡檢作業按照巡檢內容主要分為線路本體、附屬設施、通道及電力保護區三大部分。
2.1 線路本體巡檢
線路本體巡檢主要包括:
(1)地基與基面。需檢查挖掘后回填土是否出現下沉,地面是否水淹、凍脹,以及是否有堆積雜物等情況。
(2)塔桿。需檢查桿塔基礎是否出現破損、疏松、裂紋、露筋等;桿塔傾斜、塔材變形、螺栓丟失、嚴重銹蝕、腳釘缺失、爬梯變形、土埋踏腳等;混凝土桿未封桿頂、破損、裂紋、爬梯變形等情況。
(3)接地裝置。需檢查是否出現接地體斷裂、嚴重銹蝕、螺栓松脫;接地體外露、缺失,連接部位有雷電燒痕等情況。
(4)絕緣子。需檢查是否出現傘裙破損、彈簧銷缺損,絕緣子串嚴重傾斜;鋼帽裂紋、斷裂,鋼腳嚴重銹蝕或蝕損、有放電痕跡;絕緣子溫度異常等情況。
(5)導線。線路金具散股、斷股、斷線;放電燒傷、嚴重銹蝕,懸掛漂浮物、覆冰;弧垂過大或過小,導線異物纏繞,導線對地及交叉跨越距離不足;舞動、風偏過大等情況。
(6)線路金具。需檢查是否出現線夾斷裂、銷釘脫落、嚴重銹蝕;均壓環、屏蔽環燒傷、螺栓松動;防振錘跑位、脫落、嚴重銹蝕、阻尼線變形;間隔棒松脫、變形或離位、懸掛異物;線夾、接續管、耐張管、引流板等異常發熱;線夾、均壓環、屏蔽環異常放電等情況。
2.2 附屬設施巡檢
附屬設施巡檢主要包括:
(1)防雷裝置。需檢查線路避雷器是否存在動作異常,計數器是否正常工作、引線接頭是否松脫等情況。
(2)防鳥裝置。需檢查鳥刺及驅鳥裝置是否出現變形、破損、螺栓松脫等情況。
(3)監測裝置。需檢查是否存在缺失、損壞、斷線、移位等情況。
2.3 通道及電力保護區巡檢
通道及電力保護區巡檢主要包括:
(1)檢查線路與附近建筑物、樹木等障礙物是否保持足夠的安全距離。
(2)檢查在線路下方或保護區是否存在有危及線路安全的施工作業及其他安全隱患。
(3)檢查線路附近是否存在易燃易爆物品及煙火現象。
(4)檢查是否存在由于自然災害引起通道環境變化。
3 巡檢機型分類
目前,根據應用領域與作業范圍的不同,市面上無人機的種類繁多。但針對于輸電線路巡檢的無人機機型主要有固定翼無人機、無人直升機以及多旋翼無人機三種。
固定翼無人機飛行距離長,速度快,巡航面積大,在巡檢作業中適合對線路走廊大面積快速巡視,但由于其自身結構原因,不能懸停獲取連續某處影像,且只能按照固定航線飛行不夠靈活,飛行轉彎弧度大,飛行速度快,因此對其所攜帶的設備性能要求高,操作難度較高,同時對起飛降落場地有一定要求。
無人直升機可以實現定點起降,并且可以進行空中懸停,但抗風性較差,抖動較嚴重,拍攝出的影像容易出現虛化、條狀影帶等問題,難以獲得高質量的影像。
多旋翼無人機體積小、重量輕、噪音小、隱蔽性好,適合多平臺,多空間使用,飛行穩定性高,抵御氣流干擾能力強。飛行高度低,具有很強的機動性,執行特種任務能力強,可以對線路桿塔、絕緣子、金具等設備進行高質量影像信息采集,便于技術人員進行后續分析。綜合分析后,設計了六旋翼無人機+高分辨率相機作為本次輸電線路巡檢作業的飛行器,如圖1所示。

圖1 六旋翼無人機+高分辨率相機Fig.1 Six-rotor UAV with high resolution camera
4 巡檢作業流程
無人機巡檢作業作為一種新型巡檢模式,目前仍處于試驗階段,且整個巡檢作業流程還沒有統一的行業規范。本文根據南方電網貴州某超高壓輸變電工程的實際情況,采用六旋翼無人機進行巡檢作業,將巡檢作業流程優化為:人員配備、作業前準備、無人機準備、巡線工作、圖像視頻傳輸、圖像處理等[7-8]。
4.1 人員配備
應根據巡檢任務和所用機型合理配置人員,一般小型機需操作人員2~3名,中型機3~4名,大型機5~8名。巡檢作業前應對作業區域的航空、氣象、地理等必要知識進行了解。
4.2 作業前準備
巡檢前作業人員應進行現場勘查,確定作業內容和無人機起、降點位置,了解巡檢線路情況、海拔高度、地形地貌、氣象環境、植被分布、所需空域等,并根據巡檢內容合理制定巡檢計劃。必要時作業單位要向航空管制部門報批巡檢計劃。
4.3 無人機準備
巡檢作業前應檢查無人機機身各部件是否存在損傷,機體與云臺信號連接是否正常,以及電池電量、燃油燃料是否充足等。
4.4 巡檢工作
(1)單側巡檢
對500 kV及以下電壓等級的交、直流單回或同塔雙回輸電線路,在無人機傳感器視場能夠覆蓋巡檢目標且目標間無明顯遮擋時,宜采取單側巡檢方式。同時對較陡山坡線路區段采取單側巡檢方式,無人機處于遠離山坡側。
(2)雙側巡檢
對500 kV及以下電壓等級的交、直流同塔四回及以上輸電線路,以及500 kV以上電壓等級的交、直流輸電線路,在無人機傳感器視場無法覆蓋巡檢目標或目標間有明顯遮擋無法區分時,應采取雙側巡檢方式。
(3)巡檢方法
巡檢時無人機以較低的速度起飛并接近桿塔,與桿塔之間保持適當的安全距離進行勻速飛行,針對故障多發區及疑似故障點可在桿塔附近懸停拍攝,使信號傳感器在穩定狀態下進行數據采集,確保數據的有效性與完整性。中型、大型無人機桿塔巡檢高度宜與線路地線橫擔等高或稍高,當下端部件視角不佳不能看清時,可適當下降高度。手動操作飛行時,中型、大型無人機外緣與桿塔及線路邊導線巡檢側外緣水平距離分別不小于15、20 m。自動飛行時,各水平距離比手動操作飛行時相應增大10 m。中型、大型無人機在每基桿塔處低速或懸停巡檢時間依照無人機具體性能參數及所攜帶傳感器數據采集時間決定。小型無人機可根據實際需求調整懸停姿態及時間,無人機外緣與待巡檢設備、部件的水平距離一般不宜小于10 m,可根據無人機性能、線路電壓等級和巡檢經驗調整。同時禁止無人機在導線之間穿行。
4.5 圖像視頻傳輸
無人機在線路巡檢過程中,無人機搭載的攝像頭對巡檢對象進行實時飛行畫面拍攝,通過無線視頻圖像傳輸模塊將拍攝的畫面傳輸到地面監控系統。地面技術人員通過視頻可以了解無人機當前位置與待檢測目標大概距離、無人機安全問題等。當無人機達到指定巡檢地點后,通過地面指令,控制無人機懸停并切換相機工作模式,對預定檢測區域進行拍攝。無人機拍攝的影視資料會自動保存在相機相應的存儲區,同時通過無線視頻圖像傳輸模塊,將拍攝的圖像傳輸到地面監控系統,便于技術人員進行后續分析[9-12]。
4.6 圖像處理
目前對于無人機拍攝得到的圖像處理主要包括:首先對其進行人工瀏覽,對明顯的故障點進行識別并做好故障點登記;其次對于其中可能存在故障的圖片,進行仔細的圖像識別處理;認真核查是否存在故障點,必要時對個別無法識別的故障點進行二次實地勘測;隨著影像匹配技術、自動空中三角測量技術和海量影像數據處理技術的日趨成熟,處理無人機低空影像數據的軟件日趨增多,現階段已基本上具備了對無人機所拍攝的影像數據進行自動化處理的技術條件。
5 無人機輸電線路巡檢實際應用
依托貴州某超高壓輸變電工程,對無人機巡檢模式進行實地測試。根據當地實際地形和自然環境設定合理的巡檢路線。此次無人機巡視線路為 500 kV雙回線路,線路總長度為 7.14 km,共18基桿塔。在室外溫度5℃下,南方電網貴州某電力公司僅用2 h就順利完成巡檢工作,累計發現通道隱患8處,復檢核查未消缺陷6處。圖2、3分別為在巡檢路線中發現的絕緣子斷裂隱患和塔間鳥窩隱患。圖4為觀測到的云臺紅外探測圖。本次無人機輸電線路巡檢測試有效地節約了巡檢時間,降低了人工巡檢成本,工作效率提升了60%以上。且無人機相繼完成了高清巡視和紅外測溫兩項工作,并不斷變換拍攝角度和距離,對導線掛點部位進行懸停拍照。對導線、間隔棒、線路通道等進行了重點巡視,實現了圖像的實時回傳和快速拼接,有效輔助了工作人員對山區線路的巡檢工作,實現了輸電線路巡視“360°無死角”,極大地保障了電網的安全穩定運行。
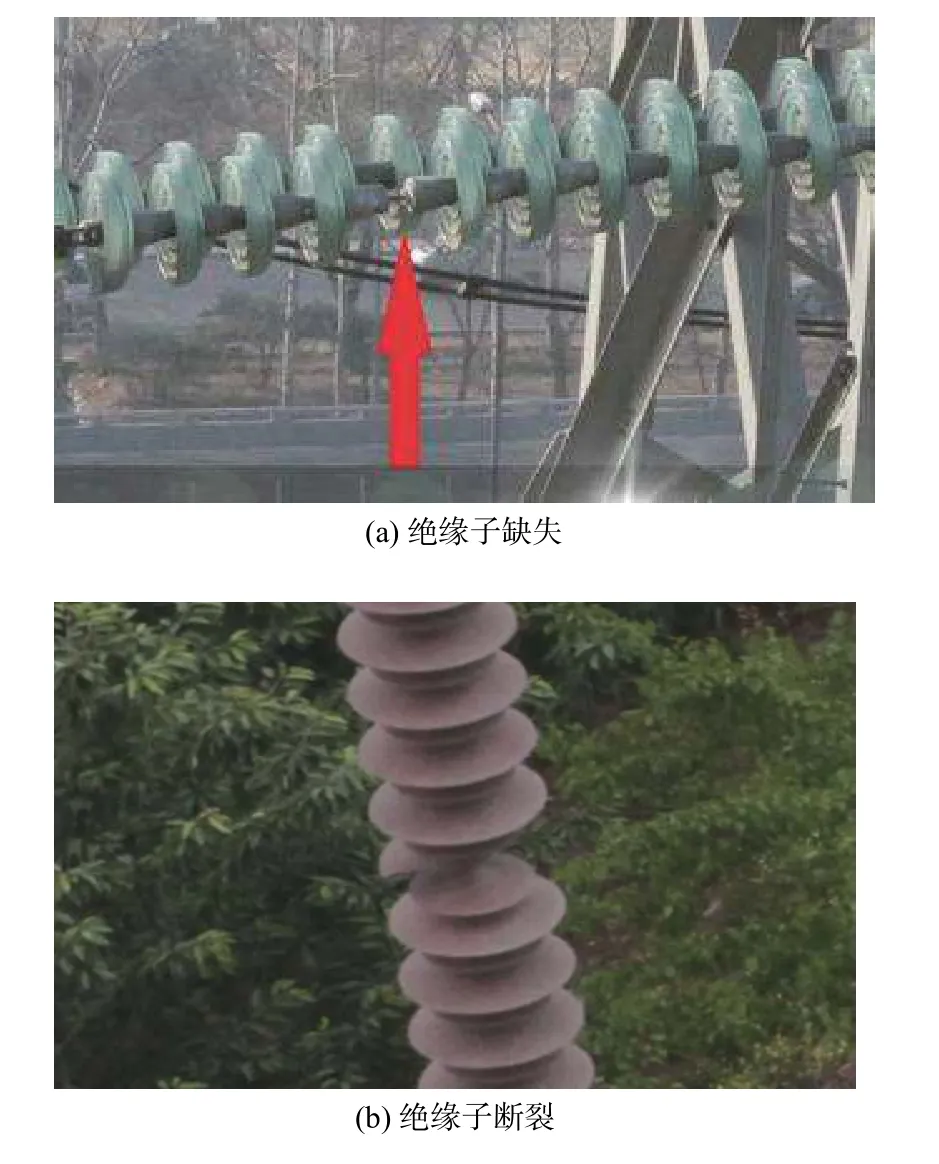
圖2 絕緣子斷裂隱患Fig.2 Accident of the insulator fracture

圖3 塔間鳥窩隱患Fig.3 Hidden nest between two towers
6 無人機巡檢作業中存在的問題
(1)需提高遠距離無人機的通信能力
現階段受無線通信技術的限制,無人機巡線作業需操作人員現場操控,且巡檢范圍不能超過它的最大遙控距離,同時也不能實時地將無人機獲取的現場圖像傳回集控指揮中心,無法實現集控操控。雖然目前一些新型無人機可以接入3G移動通信和無線網絡模塊,但巡檢作業經常穿越一些沒有移動信號覆蓋的區段,致使該技術的應用受到了一定限制[12]。
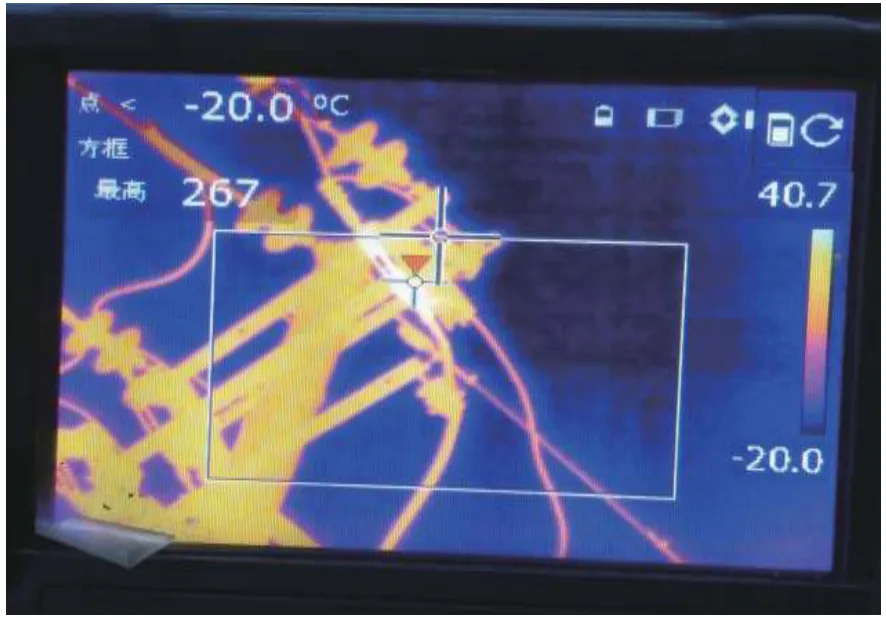
圖4 云臺紅外探測圖Fig.4 Infrared detection picture in pan-tict-zoom
(2)需提高無人機的避障能力
安全問題是輸電線路巡檢過程中的重中之重。無人機巡檢過程中,難免會遇到交跨線路、樹木、建筑物等障礙物。無人機是通過GPS方式進行導航定位的,由于GPS存在誤差,所以無人機在執行任務的過程中可能會出現偏離預定航向的情況,造成無人機與輸電線路或其他障礙物發生碰撞。雖然目前無人機已具備一定的智能避障能力,但仍然缺乏應對預期外障礙物的緊急避讓能力。
(3)需提高無人機的飛行操控能力
由于巡檢的輸電線路一般較長,且部分線路或區段穿越山區、叢林或無人區。因此在一些極端情況下,是否能夠確保無人機飛行平穩,不發生振動和抖動,并且能有效地捕捉線路故障點,這對無人機操控人員的飛行操控能力要求極高。
(4)需研究應對無人機墜毀所引發的次生災害的方法
對于無人機自身而言,由于某些機型以燃油作為動力,其墜毀本身就是一個危險源。在建立完善、可靠的無人機巡檢作業流程外,還應研究降低在無人機巡檢發生墜毀后所引發次生災害的幾率,重點在于對其機身的可燃性物質的控制,防止其墜毀所引發的山火災害。主要包括無人機整體材質的選擇、燃料的選擇以及自身保護裝置等。從燃料角度考慮應選擇不易燃燒,燃點高的航空煤油或柴油。從結構設計角度考慮,無人機的油箱設計時應采用不易燃燒的非金屬復合材料,同時設計時應注重燃油的不易灑落,遇到碰撞或墜毀后能夠保證燃油的不易燃燒,確保無人機即使在發生墜毀的情況下也不會引發更大的危害[13-16]。
7 結束語
傳統的人工巡線方式不僅工作強度高,且由于“視覺盲區”的存在巡檢質量低以及部分巡檢線路自然環境惡劣,特別是對一些自然環境相對惡劣地帶,如高山峽谷、淺灘濕地、密林無人區等特殊區域的輸電線路巡檢時具有很多困難。但無人機巡檢可在各種惡劣氣候、復雜地形、災害天氣情況下以極低的人工成本,獲取高精度的圖像信息,以此可準確、高效地判斷設備運行狀況,提高巡視效率并避免巡檢事故的發生。此次無人機在貴州某超高壓輸變電工程的實地巡檢,充分說明了無人機巡檢的高效性。并且對所提出的無人機巡檢作業流程進行了有效的校驗。試驗證明針對不同的巡檢作業內容與巡檢機型,該巡檢作業流程都能高效地完成巡檢作業內容,其設計合理且可操作性強。此套統一、規范的無人機巡檢作業流程的提出,將極大地促進無人機在輸電線路巡檢方面的應用與推廣。同時基于智能電網與超/特高壓輸電線路建設的大背景,無人機巡檢作為電網安全穩定運行的有力保障必將受到廣泛關注。在不久的將來無人機巡檢勢必成為一種快速、高效,大有發展前途的輸電線路巡檢方式。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08