嵌入式大氣數據測量系統技術研究進展
2019-04-02 08:50:54丁智堅吳東升吳穎川賀元元
宇航學報 2019年3期
丁智堅,周 歡,吳東升,吳穎川,賀元元
(1. 中國空氣動力研究與發展中心吸氣式高超聲速技術研究中心,綿陽 621000;2. 中國工程物理研究院總體工程研究所,綿陽 621900)
0 引 言
高超聲速飛行器憑借速度優勢成為了當下及未來航空航天技術領域的前沿技術,得到了全世界范圍內的廣泛關注。高精度的大氣數據測量技術則是實現高超聲速飛行器精確穩定控制的前提條件[1],亦是吸氣式沖壓發動機穩定工作的重要保證[2]。與此同時,準確的大氣數據是高超聲速飛行試驗鑒定與評估的重要數據。
依據測量手段不同,大氣數據測量方法可分為直接法和間接法。直接法主要是指通過傳感器(如空速管、攻角/側滑角傳感器等)對飛行環境中來流的總溫、總壓、靜壓、攻角和側滑角等參數測量,經機載計算機解算、補償和修正后,獲得自然來流真空速、指示空速及馬赫數等重要飛行參數信息。間接法主要是指通過機載導航系統(通常以慣性導航系統為主)獲得飛行器位置及速度信息,并結合內置大氣模型解算來流總壓、靜壓、攻角、側滑角、馬赫數、飛行速度等大氣數據[2]。相較而言,直接法受氣流干擾較大,特別是在大攻角、高動態飛行條件下,測量精度難以保證;間接法受慣性導航系統(Inertial navigation system,INS)精度以及大氣模型精度的影響較大,無法保證長航時飛行下的高精度測量。此外,由于采用了傳感器外置的布局方案,傳統大氣數據測量(Air data sensing,ADS)系統在隱身性以及熱防護方面難以滿足高超聲速飛行器任務需求[3]。
為彌補傳統ADS系統的不足,美國國家航空航天局(National aeronautics and space administration,NASA)于20世紀60年代在X-15項目中提出將傳感器內嵌于機體來測量大氣數據的思想,并研發了相應的原理樣機[4]。由于所設計的機械裝置過于笨重且沒有達到預期效果,該方案隨X-15項目而終止,但這種思想為嵌入式大氣數據測量(Flush air data sensing,FADS)系統的誕生和發展提供了寶貴的經驗和發展方向。隨后,NASA蘭利研究中心在解決航天飛機再入后大氣數據測量問題時,提出了在飛機頭部布置大量壓力傳感器,通過測量壓力來推算出大氣數據的技術,即嵌入式大氣數據測量技術。該技術主要利用分布在飛行器頭部、機身等部位的測壓孔,實時測量來流壓力,通過機載計算機解算,獲得總壓、動壓、馬赫數、攻角及側滑角等大氣數據。經過多年的發展,目前FADS技術已經成功應用于多個型號的飛行器及飛行試驗中,如美國X-15[4-5]、F-14[6]、航天飛機[7-8]、F-18[9-10]、X-31[11]、X-33[12]、X-38[13]、X-34[14-15]、X-43A[16]、日本HYFLEX[17]以及德國SHEFEX II[18]等。
本文通過對國內外高超聲速飛行器FADS技術研究資料分析與研究,重點圍繞研究背景、發展歷程、關鍵技術以及FADS/INS組合測量算法等方面,對FADS技術進行了概括、分析和總結。最后,展望了FADS未來的發展方向及應用。
1 FADS技術需求分析及發展歷程
1.1 FADS技術發展需求分析
高超聲速飛行器具有氣動與控制高度耦合的特性,特別是,對于以吸氣式超燃沖壓發動機技術為動力的高超聲速飛行器而言,存在發動機與機體之間高度耦合、飛行姿態與發動機工作性能之間高度耦合等現象,使得高超聲速飛行器對控制系統要求更高。而高精度大氣數據則是實現高超聲速飛行器精穩控制的重要保證[1]。
對于傳統ADS系統(見圖1)而言,當飛行器處于高超聲速或大攻角飛行狀態時,飛行器頭部周圍氣流將受到黏性耗散效應和激波強烈壓縮而產生高溫環境,致使ADS系統面臨被燒蝕的風險。此外,ADS系統中外露的傳感器亦會增加雷達反射面積,降低飛行器的隱身性能和生存能力[3]。
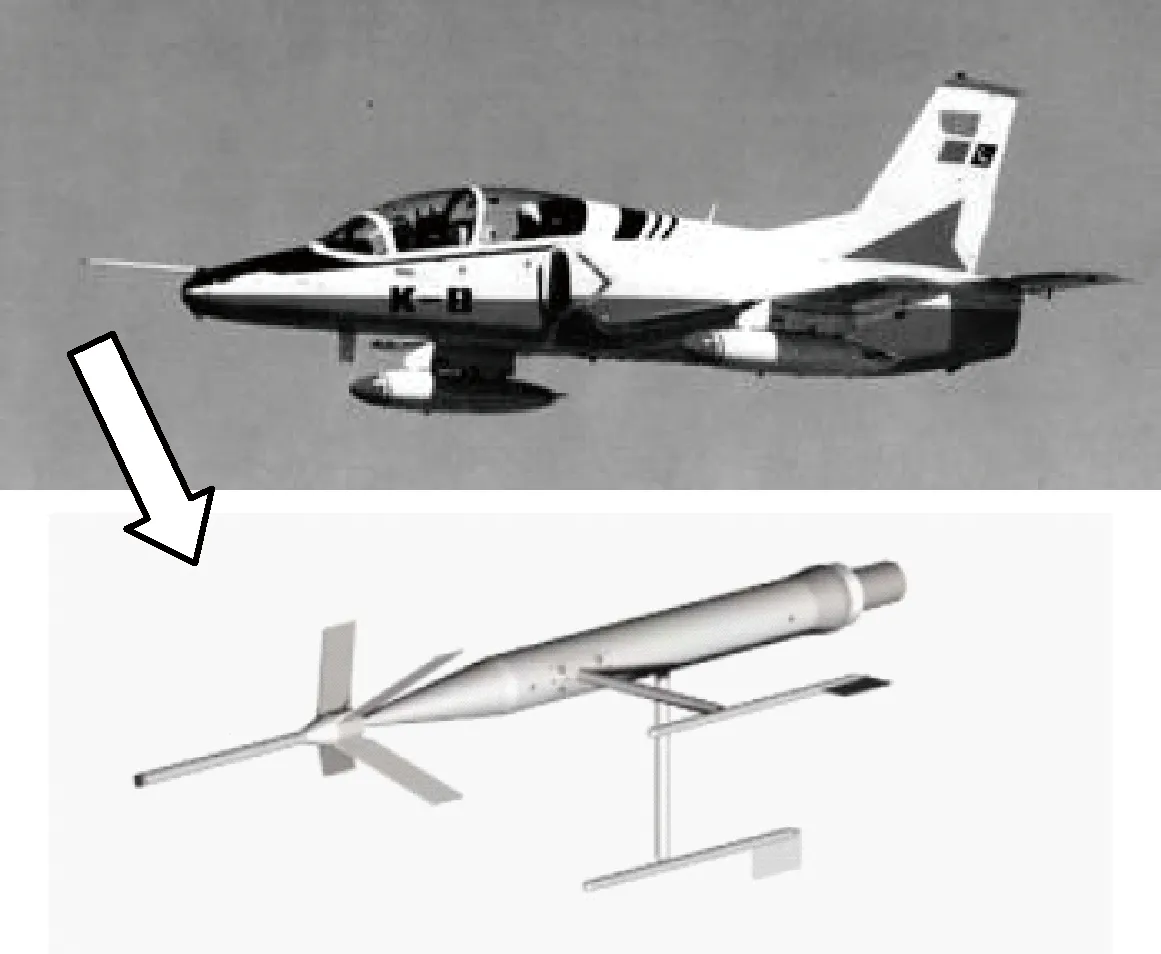
圖1 傳統大氣數據測量系統
隨著航空航天技術的迅猛發展,傳統大氣數據測量系統難以滿足新一代高性能飛行器的任務需求,特別是難以滿足高超聲速飛行和大攻角高機動飛行任務的需求,從而引發研究者對新的大氣數據測量方法進行探索。
1.2 國外FADS技術發展歷程
20世紀60年代,美國NASA針對超聲速飛行器X-15(最大飛行速度為Ma5.3)研發了一套“Ball-nose”的大氣數據測量系統(見圖2),以適應X-15超聲速飛行時的高溫及低動壓飛行環境[4]。如圖2所示,該系統外觀為半球體,并嵌置于飛行器頭部,通過機械結構令球體相對機體可以自由活動。球表面外露側上有6個測壓孔,其中一個位于正中位置,一個用于校準,剩余4個成十字型布局,上下兩個用于攻角測量,左右兩個用于側滑角測量[4]。該系統通過壓力傳感器得到對應的壓力信號,反饋到液壓機構,利用機械裝置保證攻角測壓孔和側滑角測壓孔的壓差始終為零,以此感受來流空氣入射角。最后,通過測量球體與機體之間的相對姿態,確定飛行器當地攻角與側滑角、馬赫數、總壓和靜壓等大氣數據[5]。然而,飛行試驗表明,這種采用復雜精密機械結構的方案在超聲速飛行環境中測量大氣數據時精度較差,特別是馬赫數、靜壓和動壓等大氣數據的測量誤差較大,且測量結果對飛行攻角和馬赫數特別敏感[5]。因此,在X-15項目結束后,該方案即被拋棄。然而這種采用壓力傳感器陣列來獲取大氣數據的設計思路成為了后續FADS理論的先河。

圖2 X-15 Ball-nose示意圖[5]
1980年,NASA蘭利研究中心在航天飛機再入大氣數據測量系統(Shuttle entry air data system, SEADS)項目中,針對航天飛機再入后大氣數據測量問題,提出了一種新的嵌入式大氣數據測量方案[6]。該方案在飛機頭部表面布置20個測壓孔,所有的測壓孔均由一個壓力傳感器來測量飛行器表面的壓力分布,通過特定的算法,由機載計算機求解出大氣數據。同“Ball-nose”系統相比,該方案去除了復雜繁瑣的機械裝置,首次利用飛行器表面氣壓分布直接測量大氣數據,增強了FADS技術的可行性。
隨后,蘭利研究中心對該系統進行了多次的風洞試驗,并于1981年在KC-135飛機上對FADS概念進行了試驗研究[7]。不久,SEADS項目又在哥倫比亞號航天飛機STS- 61-C任務中進行了飛行試驗[8]。這些研究證明了FADS技術在亞聲速、跨聲速和超聲速時均能很好地工作。SEADS項目的研究為后續FADS技術的研究工作提供了大量寶貴的經驗和數據,同時展示出FADS技術在不同速域的巨大潛力,拓展了FADS技術的應用背景。
1987年,美國通過F-14項目[6],進一步論證了FADS的可行性和適用范圍。該項目就飛行器表面測壓孔位置與飛行大氣數據之間的關系進行了深入的研究,分析了大氣數據的解算精度對測壓孔位置的敏感性。試驗結果充分驗證了FADS技術在跨聲速和大攻角等各種復雜飛行環境中的適用性和良好的工作性能。
早期的研究重點是建立飛行器表面壓力與大氣數據之間的函數關系,以及驗證FADS原理可行性,并沒有獲得一套FADS實時解算算法。
20世紀90年代初,針對F/A-18大攻角研究飛行器所面臨的大攻角、高動態的飛行環境,NASA代頓實驗室利用FADS技術,設計了一套HI-FADS(High angle-of-attack flush air data sensing)系統[9]。該系統在機頭表面裝置25個測壓孔(如圖3所示),每個測壓孔均與一個多傳感器電子壓強掃描模塊相連,測量對應氣壓數據。該項目進一步驗證了FADS技術在最大攻角為60°飛行環境中的適用性和可行性[10]。
圖3 F-18 HI-FADS壓力測孔布局圖

1988年,Whitmore團隊又在X-33項目[12]中進一步深入地研究了FADS大氣數據實時解算算法,提出了另一種更簡單有效的算法——三點法[11]和利用風洞試驗數據的校準補償算法,增強了算法的穩定性,提高了算法的精度水平,并圍繞相關技術開展了大量的風洞試驗和飛行試驗。該項研究成果表明FADS在硬件和軟件上均達到了能夠在線應用的水準。但是該項目在開展飛行驗證試驗前撤銷了。
隨后,在X-38項目中[13],FADS技術用于飛行器控制系統的反饋回路中,為飛行器控制和飛行時序編排提供了輸入信息。該項技術在1996年到1998年亞聲速飛行試驗中得到了充分的驗證[13]。
2003年前后,采用了FADS技術的X-31[11]和X-34[14]驗證機的飛行試驗成功和F- 4型飛機的最終定型,意味著FADS已達到可以實際型號應用的水平,標志著FADS技術已進入了成熟階段(如圖7所示)[15]。
2004年,NASA在愛德華空軍基地的X- 43A超聲速飛行項目中,首次驗證了FADS/INS組合測量系統的性能[16]。該項技術充分利用了FADS在平穩至中等機動飛行時的高精確性和INS在大機動飛行時的高敏感特性,采用偏差濾波技術,實現對飛行大氣數據的高精度測量。盡管此次試驗存在馬赫數小于4時測壓點測量值與理論值偏差較大等問題,但試驗結果充分驗證了FADS與INS技術相結合的可能性和優勢性。同時,該項目驗證了FADS技術在具有尖楔前體氣動外形高超聲速飛行器的可行性,進一步展示了FADS在高超聲速飛行中的穩定性及可靠性[16]。
截止目前,國外FADS技術已廣泛地應用于各速域的高性能飛行器中,如美國X-15[4-5]、F-14[6]、航天飛機[7-8]、F-18[9-10]、X-31[11]、X-33[12]、X-38[13]、X-34[14-15]、X- 43A[16]、日本HYFLEX[17]以及德國SHEFEX II[18]等從亞聲速到超聲速再到高超聲速的各類飛行器,甚至應用于火星探測項目中火星大氣數據測量任務中[19-20]。
1.3 國內FADS技術發展歷程
同國外FADS技術的研究相比,我國在該領域的研究起步較晚,差距較大。以南京航空航天大學和中國航天空氣動力技術研究院為代表的部分高校及科研院所對FADS技術工作原理、氣壓孔布局、大氣數據解算及補償算法、系統故障檢測與管理、基于INS組合測量系統算法等方面進行了相應的研究[21-26]。
宋秀毅[22]在三點法基礎上,詳細的研究了FADS解算算法及對應的補償算法。沈國清[23]對氣動導管延時誤差、黏滯作用誤差、熱流逸誤差、壓力孔初始位置誤差、機頭熱膨脹引起的壓力孔位置誤差、傳感器截斷誤差、傳感器測量誤差以及傳感器延時誤差共八種誤差的作用機理進行了詳細的分析,并給出了部分誤差的補償措施。秦永明等[25]針對錐形頭部超聲速飛行器,開展了FADS標定試驗研究,驗證了攻角和側滑角的解算算法。陳廣強等[26]針對吸氣式空空導彈,設計了FADS方案,研制了一套原理樣機,并在超聲速風洞中開展了相應的試驗。試驗結果表明:靜壓測量相對誤差小于6.9%,馬赫數測量誤差小于0.1,攻角和側滑角的測量誤差均小于1°。
目前,國內關于FADS技術的研究大多數還停留在理論研究水平,少數研究團隊開展過相應的風洞試驗研究。從公開報道上看,我國FADS技術遠未達到工程應用階段。現階段研究內容可為后續FADS應用奠定理論基礎,也表明了FADS技術終將成為我國未來大氣數據測量技術的發展方向。
2 FADS關鍵技術研究現狀分析
同傳統ADS相比,FADS具有適用于大攻角、高馬赫數的飛行環境,集成度高,成本低,便于安裝、調試和維護[27]等特點,已成功應用于高超聲速飛行器、空天往返飛行器、高性能戰斗機等各種型號的飛行器中。
如圖4所示,FADS系統由飛行器表面測壓孔列陣、測壓設備(含引氣管路和壓敏器)、算法代碼、計算機以及其他電氣設備組成。其基本工作原理是:在飛行中,來流空氣由飛行器表面嵌入的測壓孔捕獲,通過引氣管路和壓力傳感器測量出飛行器表面不同位置壓力,最后利用大氣數據與飛行器表面壓力之間的模型,通過算法解算,獲得此時對應的飛行大氣數據(包括靜壓、動壓、馬赫數、攻角和側滑角)。
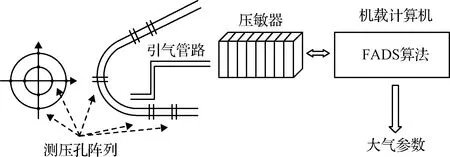
圖4 FADS示意圖
從FADS的工作原理中可以看出,FADS的關鍵技術包括測壓孔列陣位置結構布局、大氣數據解算算法以及由引氣管路引起的測量延遲補償等。
2.1 測壓孔列陣位置結構布局研究現狀
FADS的本質是通過對飛行器表面壓力的測量從而解算出大氣數據,因此測壓孔的數量和位置結構布局將直接影響FADS的解算算法及工作性能。原則上,測壓孔位置需選擇壓力和溫度較為穩定且受外界干擾較小的區域。同時,測壓孔之間分布盡量較大,增大不同位置的測壓孔對攻角、側滑角、總壓和動壓測量之間的差異有利于系統解算精度的提高。
目前,常見的測壓孔分布形式有十字型、放射型和扇形等。其中十字型最簡單,應用也最廣泛(如航天飛機[7-8]、X-33[12]、X-34[14]、X- 43A[16]、HYF-LEX[17]和MEADS[19]等)。放射性(F-18[9])和扇形(X-31[11])主要用于有特殊機動需求的飛行器中。圖5~7給出了典型FADS測壓孔布局示意圖。

圖5 F-18測壓孔布局示意圖[9]
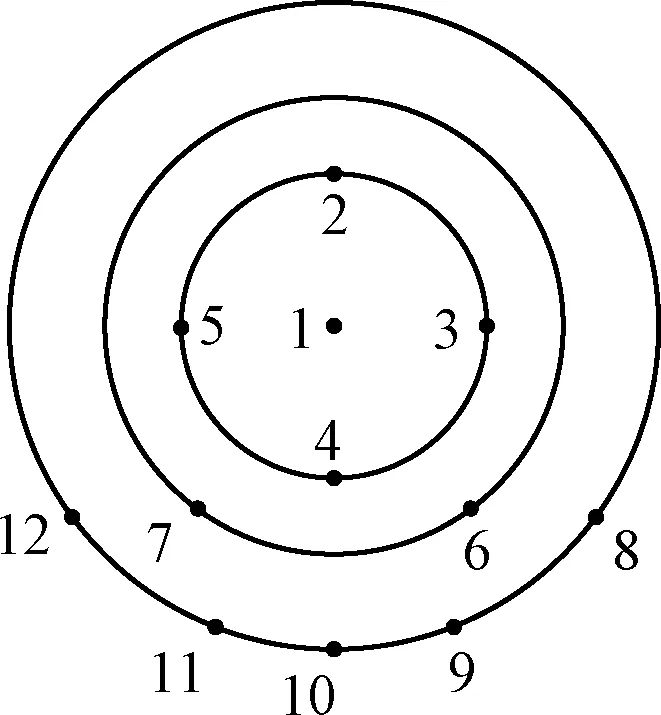
圖6 X-31測壓孔布局示意圖[11]
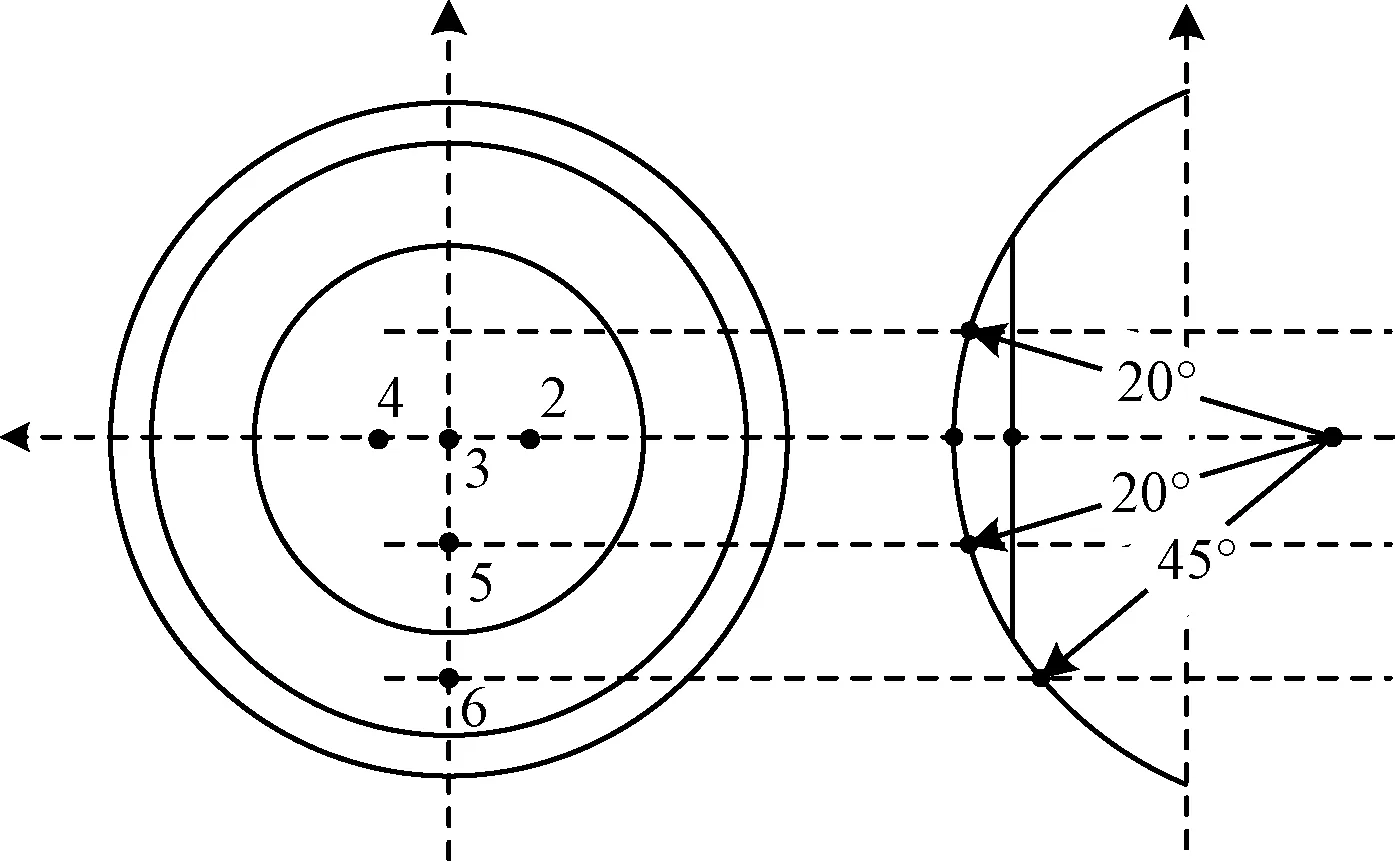
圖7 X-33測壓孔布局示意圖[12]
從數學角度而言,FADS需要對馬赫數、攻角、側滑角、來流靜壓及動壓共5個未知變量解算,因此系統要求最少測壓孔數量不少于5個。理論上,增加測壓孔數目可提高系統測量精度,增強系統的魯棒性。但隨著測壓孔數目的增加,系統結構復雜度增大,同時系統的解算量亦會增大。文獻[13]研究了測壓孔數目對系統性能的影響,指出當測壓孔數量超過9個時,系統測量精度隨測壓孔數量的增加將變得不明顯。此外,測壓孔數目的增多,則會增大系統的體積和成本,加大系統維護的復雜性和系統解算的計算量。因此,在設計測壓孔數量和布局時,需要在滿足精度的條件下,提高系統的穩定性,減小系統的計算量。
通常,測壓孔位置的確定是由靈敏度分析結果決定的,即測壓孔位置應對飛行器表面壓力變化最為敏感,而對噪聲的敏感度較低。在X-34[14-15]和HYFLEX[17]飛行器FADS設計中,測壓孔的位置均是基于系統靈敏度分析結果而選擇的。從結果上看,這些測壓孔均能確保FADS在飛行任務中具有良好的性能。X- 43A中FADS測壓孔位置則是基于斜激波理論和工程經驗確定的。此外,李清東等[28]基于系統可靠性和噪聲抑制能力對幾種典型測壓孔布局類型進行了分析。王鵬等[29]分別針對鈍頭體和尖楔前體飛行器的FADS測壓孔布局進行了研究,分析了測壓孔布局對三點法求解精度的影響,給出了測壓孔布局的原則。
表1給出了部分飛行器FADS中測壓孔的數目及布局方式。從表1可以看出,十字型測壓孔布局方式最為常見,此時測壓孔在對稱面內數目不少于4個,在兩側對稱布局不少于2個。從三點法的解算算法上看,兩側對稱布局的測壓孔主要用于飛行器側滑角的解算,而對稱面內測壓孔主要用于攻角解算。
2.2 FADS算法及比較
從FADS工作原理中可以看出,FADS對大氣數據是間接測量的,即通過特定算法計算得到的。因此,解算的算法就顯得尤為重要。目前,常見的FADS解算算法有最小二乘迭代法[22]、三點法[11,30]、神經網絡法[33-35]、查表法[36]、Kriging法[37-38]以及Kalman濾波法[19]等。
從數學角度而言,FADS算法屬于系統參數辨識問題,即利用觀測量估計出系統參數的問題,其問題的核心在于系統建模和系統解算。其中系統模型至關重要,模型是否精準將直接影響算法的精度。目前,FADS系統模型主要是通過大量空氣動力學研究的“三大試驗”(風洞試驗、CFD仿真以及飛行試驗)數據建立的。然而,由于各飛行器氣動布局迥異、FADS測孔位置的不同,導致系統模型不具備普適性。目前,大多數FADS解算算法的研究是針對鈍頭體布局飛行器展開的[13],關于其他氣動布局的FADS算法的研究較少。此外,任何一種方法是否有效,需要通過飛行試驗的檢驗。而受制于飛行試驗昂貴的成本和極高的不確定性,大多數FADS算法仍留在理論與仿真研究的水平。
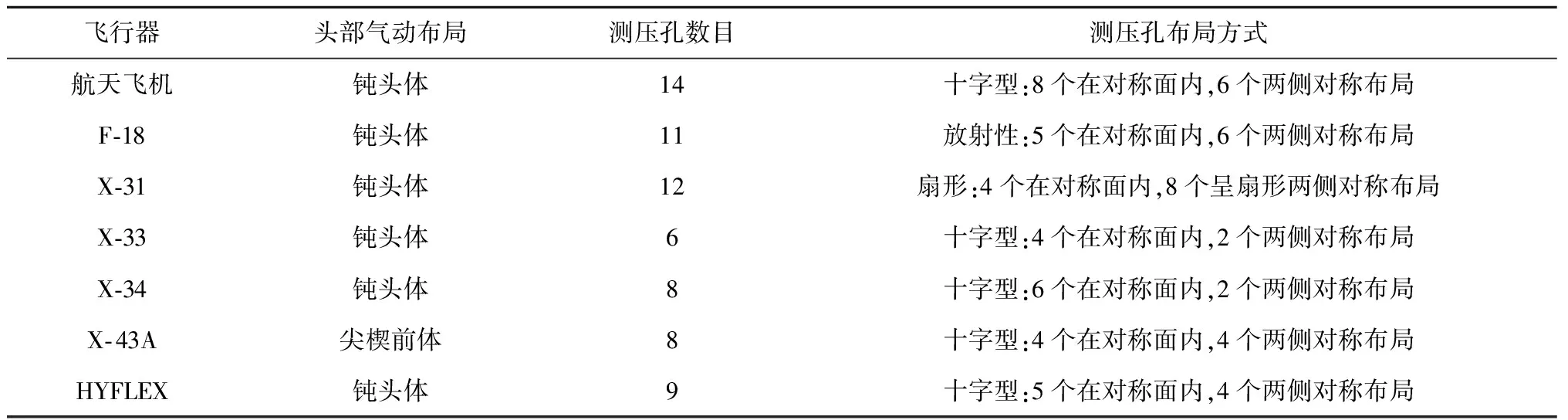
表1 部分飛行器FADS測壓孔數目及布局方式Table 1 The amount and configuration of pressure ports for some vehicles
對于FADS而言,系統算法精度、實時性以及技術成熟度等均是用戶關心的重點。本文結合眾多參考文獻,從算法實時性、精度、穩定性、對測壓孔位置要求、對驗前信息要求以及應用現狀等多個方面出發,對常見FADS算法的優劣性進行了總結歸納和比較(見表2)。從表2可以看出,除Kalman濾波法外,其余算法的實時性均會受到引壓系統氣動延遲的影響,其中最小二乘法、三點法均屬于迭代算法,造成其實時性不如神經網絡法、Kriging法和查表法,而Kalman濾波算法的實時性憑借著INS系統的輔助而得以提升。在精度方面,查表法精度最差,最小二乘算法不適用于高馬赫飛行環境,除此以外其余算法的精度水平均較高。對于穩定性而言,只有神經網絡法較好,其余算法(不含查表法和Kriging法)在實際計算中均需要迭代,因此對初值較為敏感,不合適的初值會引起系統的發散,在實際使用中,需認真對待。各種算法中,由于三點法是通過解析獲得大氣數據的解,故其對測壓孔位置要求最高,同時也對測壓孔位置較為敏感。此外,所有的FADS算法模型均依賴于前期大量的試驗數據,尤其是神將網絡法和Kriging法,對樣本需求量更大,其精度也更依賴于樣本的數目與水平。目前,最小二乘迭代法、三點法、神經網絡法、Kalman濾波法均已應用于實際飛行器中,從應用效果與發展趨勢看,神經網絡法和Kalman濾波法將是未來FADS算法的重要發展和應用方向。
通過上述分析可知,各FADS算法均有各自的優勢,在實際應用中,需結合用戶需求與硬件水平,在滿足精度要求的條件下,選擇實時性強、穩定性較好的算法。
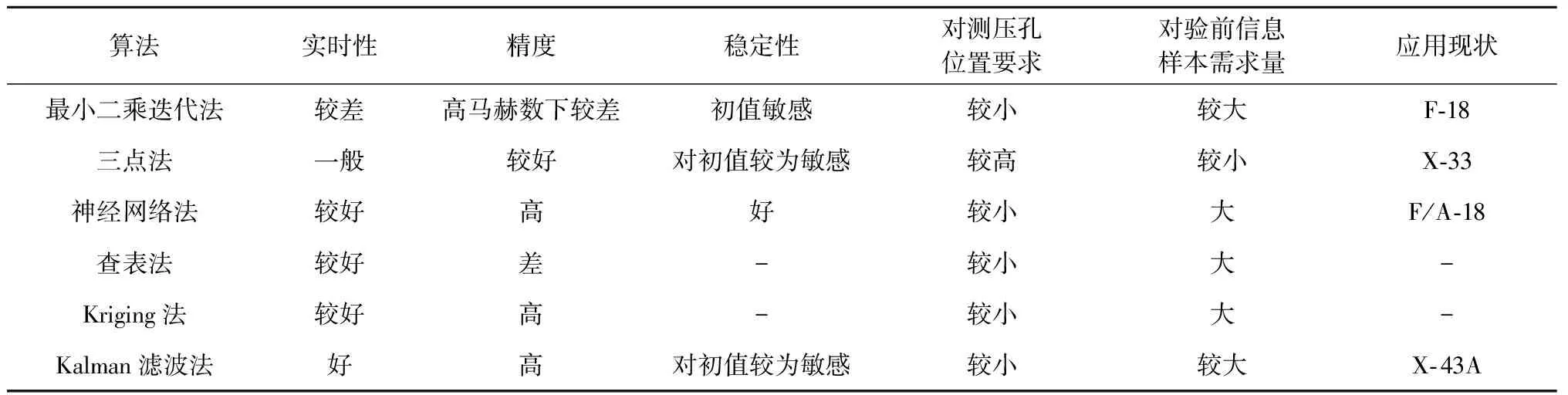
表2 FADS主要算法對比Table 2 Comparisons of FADS algorithms
2.3 氣壓測量延遲補償技術研究現狀
為避免突出結構在高超聲速飛行環境中的燒蝕問題,FADS系統采取嵌入式物理結構,即在飛行器表面開有測壓孔。每個測壓孔通過引氣管路與飛行器內壓力傳感器相連,將表面氣壓傳遞至壓力傳感器,以獲得飛行器表面壓力分布信息[11]。從數學角度看,引氣管路相當于一個低通濾波器,其長度、直徑以及傳感器容腔體積均會影響氣壓測量的精度。此外,考慮到引氣管路的存在和空氣具有可壓縮的特性,FADS在測量飛行器表面壓力時存在一定時間上的遲滯,導致系統的實時性和精度受到很大程度的影響。近年來,研究者針對氣壓測量延遲問題開展了大量的研究。
宋秀毅等[39]在壓力傳感器動力學模型的基礎上分析了壓力傳感器幾何外形尺寸對測量性能的影響,并給出了高精度壓力傳感器的設計準則。高隆隆等[40]針對FADS引氣管路的動態相應特性進行了分析,建立了壓力傳遞模型并針對管路黏性損失、熱傳遞效應等誤差因素進行了仿真分析。李清東等[41]針對高空大氣密度較低條件下壓力傳感器延遲時間過長問題進行了研究,提出了相位超前校正網絡延遲補償的方法。
此外,部分學者[16,23]利用INS系統大氣數據解算實時性高的特點,通過信息融合方法,將FADS與INS系統互補,以此解決FADS測量延遲問題。
3 FADS/INS組合測量技術發展現狀
對于飛行器而言,當飛行器處于大攻角飛行狀態時,將會降低處于背風面的氣壓對攻角的靈敏度。此外,當飛行器處于高動態機動時,飛行自身的機動會擾亂原有來流流場,無形中增加了飛行器表面壓力的測量誤差。上述兩點對基于飛行器表面壓力測量的FADS技術是致命的打擊,導致FADS在高動態機動(特別是飛行器大攻角或高頻率角運動)或稀薄大氣環境中精度大幅度地下降,甚至會發生錯誤。然而,當飛行器平穩飛行或處于中等機動時,FADS能夠良好地工作,且具有較高的測量精度。
與FADS不同,INS通過敏感飛行器的加速度和角速度等運動信息,根據導航算法計算出飛行器速度、位置和姿態等信息,并根據大氣模型獲得大氣數據。由于INS系統的信息源是飛行器的加速度和角速度,因此利用INS解算大氣數據時不會受到飛行狀態和飛行環境的限制。然而,由于INS自身存在導航誤差隨時間積累的缺陷問題,導致在長航時飛行條件下INS解算精度會大幅度下降。此外,INS解算大氣數據時,還會受到大氣模型不準確的干擾。
值得注意的是,FADS和INS關于飛行器相對速度的描述是不同的。前者描述的是飛行器相對大氣的運動速度(又稱為空速),其中包含大氣自身的運動;后者給出的是飛行器相對地面的速度(又稱為地速)。在不考慮大氣運動(含陣風)及其他干擾時,飛行器的空速與地速是一致的。值得注意的是,速度描述的不一致性導致了表征速度方向攻角和側滑角也存在著一定的差異。
表3給出INS與FADS在測量大氣數據方面的對比。從表3可以看出,FADS或INS各有所長,但均不能滿足所有飛行環境條件下高精度大氣數據的測量任務需求。因此,通過信息融合技術,充分利用二者特性進行優勢互補,是提高大氣數據測量水平的有效途徑。
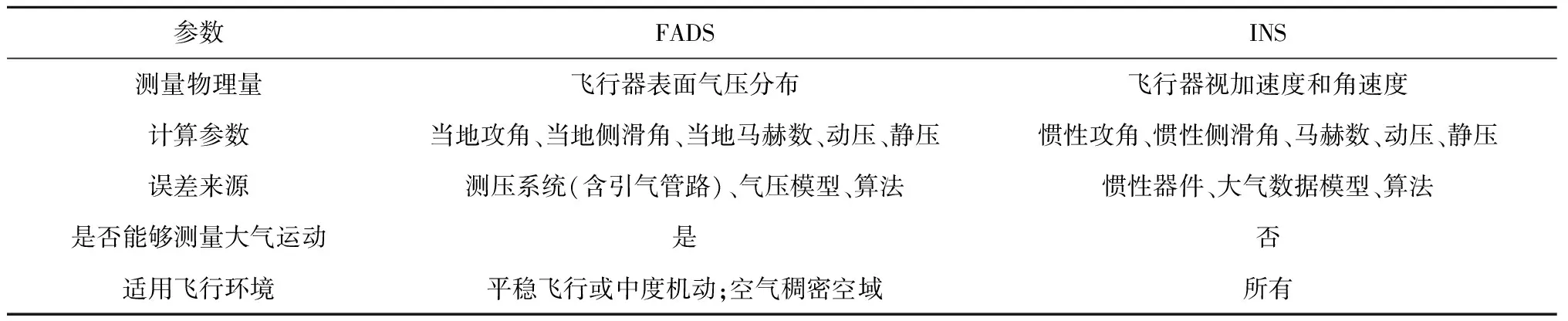
表3 FADS與INS解算大氣數據方面的對比Table 3 Comparison of air data algorithm for FADS and INS
目前,國內外眾多學者[42-50]對FADS與INS的信息融合技術開展了大量的研究。從公開的文獻上看,FADS/INS組合測量系統的信息融合算法主要有兩種:一種是基于互補濾波的信息融合算法,另一種是基于Kalman濾波的信息融合算法。
3.1 基于互補濾波的FADS/INS信息融合算法研究現狀
基于互補濾波的FADS/INS信息融合算法主要利用了FADS在飛行器低頻運動時的高精度特性和INS在飛行器高頻運動的高精度特性,分別采用低通和高通濾波器對FADS與INS信號進行處理,最終獲得高精度大氣數據信息。圖8為該算法的結構圖。從圖8可以看出,基于互補濾波的FADS/INS信息融合算法主要是利用低通濾波器和高通濾波器分別將FADS和INS計算獲得的攻角和側滑角進行濾波,再將濾波結果進行融合,最終獲得高精度的攻角和側滑角估計值。
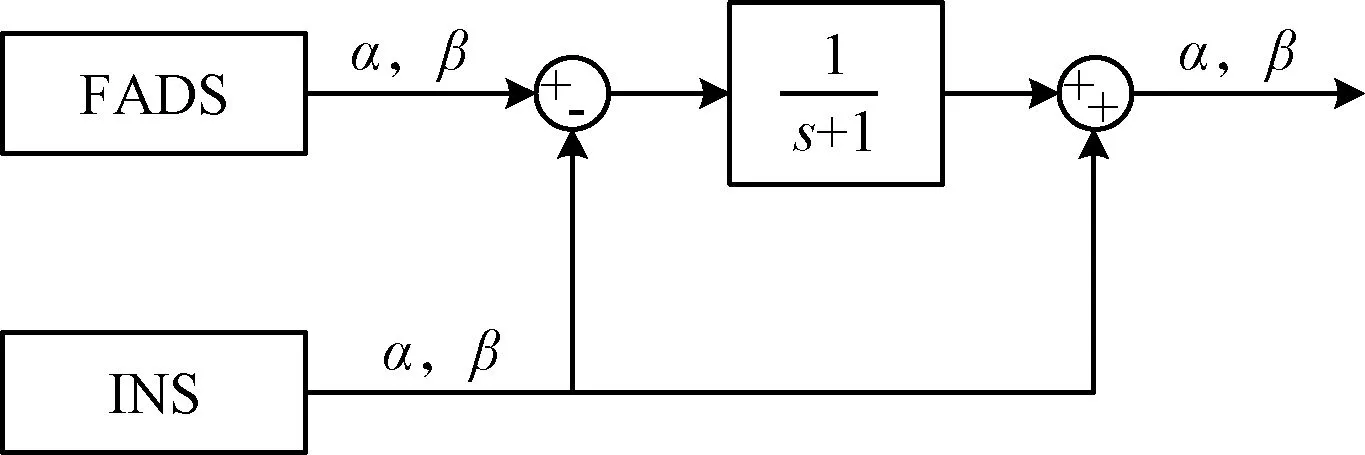
圖8 基于互補濾波的FADS/INS信息融合算法示意圖

文獻[43]基于互補濾波,設計了X-34飛行器中FADS/INS信息融合算法(文獻中稱為慣性增強濾波算法)。飛行試驗結果表明,該算法與彈道計算結果基本一致。
國內學者楊勝江等[44]對嵌入式大氣數據傳感與慣性導航信息融合方法進行研究,分析了基于互補濾波的融合算法的性能,對其在X- 43A中的應用進行了概述與總結。
3.2 基于Kalman濾波的FADS/INS信息融合算法研究現狀
由于相對速度測量的不一致,FADS與INS在解算攻角和側滑角時存在一定的差異,這種差異主要是由大氣運動即風速引起的。從測量原理上看,INS解算的攻角和側滑角不包含風速,而FADS計算出的攻角和側滑角中包含了來流的風速。利用二者之間的差異,采用一定的算法可估計出風速并加以補償。文獻[45]以INS與FADS攻角和側滑角的測量誤差為觀測量,通過牛頓迭代,計算出航天飛機飛行環境中的風速。但是該方法會將測量誤差特別是慣性器件誤差引入估計結果中。此外,當飛行彈道傾角為零時,該方法會出現奇異。
為了進一步提高FADS與INS信息融合算法的性能,文獻[20,46-49]研究了基于Kalman濾波技術的大氣數據和風估計算法。文獻[46]給出了利用Kalman濾波估計風速的方法,但狀態量中沒有包含大氣數據。文獻[47]提出了一種基于縱向風速估計的飛行控制方法。Karlgaard等[48]在火星探測任務中采用了基于Kalman濾波技術的FADS/INS大氣數據估計算法。該方法以飛行器表面壓力為測量值,選取大氣密度、大氣靜壓以及風速矢量為系統狀態量,建立系統模型。通過Kalman濾波技術實現對大氣數據的估計,文獻[48-49]給出了該算法的詳細過程。但這種算法實時性不足,僅能用于飛行試驗后數據分析。隨后,Karlgaard等[20]對該算法進行了改進,提高了算法的實時性。2012年,該算法在火星再入飛行試驗任務中進行了應用,成功獲得再入時大氣數據及風場情況。然而,該算法對系統大氣模型精度要求較高,且沒有充分考慮到FADS測壓存在延遲的問題。
國內學者楊雷等[50]也對該算法進行了研究和復現,并通過仿真算法校驗了該方法的有效性。
4 結束語
同傳統ADS相比,FADS能夠很好地解決高超聲速飛行和大攻角機動飛行中大氣數據測量問題。同時,嵌入式結構布局一方面減少了雷達反射面積,提高了飛行器的隱身性能;另一方面減少了系統機械結構部件,減小了系統體積和重量。FADS的上述優勢,滿足未來飛行器的發展需求,特別是新一代戰斗機等軍用飛行器的任務需求。因此,從科學技術發展與應用的角度看,FADS勢必會取代ADS成為軍用及民用飛行器的大氣數據測量設備,是未來大氣數據測量技術發展的必然趨勢。
現階段FADS技術已取得了一系列重大研究成果,在其未來的發展中,以下幾個方面的問題需特別值得關注:
1)高精度飛行器表面壓力測量技術。目前,FADS主要通過嵌入式測壓孔和引氣管路對飛行器表面壓力進行測量。正如前文所述,該方法存在測量延遲、高頻信號丟失等問題。對應的解決思路有兩種:一是從硬件角度出發,通過改變測壓方法,提高測量精度;二是從軟件角度出發,通過機載計算機對計算結果進行補償。
2)高保真氣動模型建立。FADS的本質是基于飛行器表面壓力測量值反解大氣數據。因此,準確的飛行器表面壓力分布與大氣數據之間的映射關系至關重要。高保真氣動模型是獲得高精度大氣數據的前提條件,亦是提升FADS性能的重要基石。
3)FADS算法性能的提高。目前,三點法依然是使用最為廣泛的算法,但其對系統測壓孔位置布局及精度要求較高,在解算靜壓、動壓和馬赫數時,迭代算法的使用容易造成系統對迭代初值較為敏感。未來FADS算法必然朝著精度高、魯棒性強、容錯性好、實時性強等方向發展。
4)組合系統發展的趨勢。目前,飛行器上常見的導航系統有INS、GPS等。而目前基于FADS和INS的組合測量系統,對INS的修正能力有限。未來,基于FADS、INS、GPS、氣象預報等多源信息的融合技術,可充分利用各導航系統的優勢,形成優勢互補,提高大氣數據和飛行參數的測量精度,必將成為未來FADS技術的發展方向。
FADS技術從誕生之初便展現出了巨大的發展潛力,已經成為國內外研究的熱點。我國在FADS相關技術方面研究起步較晚,與國外研究成果差距較大,還有很多技術細節和工程問題亟需解決。為此,一方面需要對國外先進技術保持密切跟蹤和學習,另一方面需要結合我國的國情開展相應的研究,通過學習與自主創新相結合手段,進一步推動我國大氣數據測量技術的高速發展,為新一代高性能飛行器的研發提供技術支撐和重要保障。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27