膠囊內(nèi)窺鏡五維磁定位技術的研究
2019-04-02 11:15:56蔡樂才陳冬君李隨群
實驗室研究與探索 2019年2期
盧 令, 蔡樂才, 陳冬君, 高 祥, 李隨群
(1. 四川理工學院 人工智能四川省重點實驗室, 四川 自貢 643000; 2. 宜賓學院, 四川 宜賓 644000)
0 引 言
常規(guī)的內(nèi)鏡檢測存在一定的局限性[1-2],無線膠囊內(nèi)窺鏡的問世無疑是消化道疾病診斷領域的革新,無線膠囊內(nèi)窺鏡工作期間不會影響患者的正常活動,也不會導致胃腸道的損傷[3-5]。膠囊內(nèi)窺鏡經(jīng)過多年發(fā)展,現(xiàn)在已經(jīng)取得了很大的成功,現(xiàn)有的商用膠囊內(nèi)窺鏡只能依靠自身重力或胃腸蠕動被動推進[6-7],功能開發(fā)受到體積和電源的限制,不能實現(xiàn)精確定位。
膠囊內(nèi)窺鏡的位置和姿態(tài)是確定病灶的重要信息,目前臨床應用的膠囊內(nèi)窺鏡均不具有精確定位功能,臨床醫(yī)生只能依靠膠囊運行時間大致判斷膠囊的位置,必要情況下通過拍攝X光確定膠囊是否還停留在體內(nèi)。PillCam膠囊內(nèi)窺鏡[8]通過在人體不同位置粘貼接收天線,采用射頻三角測量法比較受試者所佩戴的8枚傳感器接收膠囊的信號強弱估算膠囊的位置,平均誤差為37.7 mm,最大誤差達114 mm,難以滿足臨床應用的要求。國內(nèi)的OMOM膠囊[9]也采用與PillCam類似的射頻定位方法。因此,具有高精度實時定位功能的膠囊內(nèi)窺鏡依然是目前需要迫切解決的問題。
實現(xiàn)膠囊內(nèi)窺的精確磁定位技術有兩種:電磁定位技術和永磁定位技術。電磁定位技術是以畢奧薩法爾定律和法拉第電磁感應定律為理論基礎來實現(xiàn)定位跟蹤[10];永磁定位是根據(jù)磁場傳感器陣列測得的靜態(tài)磁場建立磁場分布模型,通過特定的算法求解方程得到永磁體的位置[11]。Schlageter等[12-13]提出了一種基于16個磁傳感器陣列的二維平面磁定位跟蹤裝置,可以對密閉的0.2 cm3大小磁鐵的膠囊實現(xiàn)5自由度定位跟蹤,膠囊跟蹤的高度可以達到200 mm。Son等[14]提出了一種電磁控制的5自由度永磁定位系統(tǒng),該系統(tǒng)的位置精度達2.1 mm,方向精度達6.7°。姜萍萍等[15]提出在目標體內(nèi)密閉標記物永磁體,在沒有噪聲情況下的位置精度為8 mm,方向精度為7°。分析以上磁定位技術,電磁定位技術的接收線圈較大,發(fā)射電路設計復雜,難以集成到膠囊內(nèi)窺鏡中,不利于封裝。
本文采用基于磁偶極子模型的永磁定位技術,實現(xiàn)了永磁體的單目標五維定位的算法,該算法根據(jù)磁偶極子模型建立非線性方程組,利用非線性優(yōu)化算法LM算法求解方程組,完成了對磁激勵源的三維位置和兩維方向的計算,并通過實驗標定提高定位精度,實驗結果表明標定后定位精度提高了3.3 mm,定向精度提高了3.1°。
1 膠囊內(nèi)窺鏡的五維定位原理
1.1 膠囊內(nèi)窺鏡空間位置和方向
1.1.1膠囊內(nèi)窺鏡位置
采用笛卡爾坐標系[16]來描述膠囊內(nèi)窺鏡的位置和方向,該坐標系由3條相互垂直不共面的數(shù)軸構成,用X,Y,Z表示。由于軸向充磁磁環(huán)中心對稱,磁環(huán)套在膠囊外殼上時磁環(huán)的中心和膠囊的中心重合,為表述方便下文統(tǒng)稱為膠囊的中心。如圖1所示,膠囊的中心點P位置為(x,y,z)。膠囊中心點P的矢量表示為
P=ix+jy+kz
(1)
其中:i,j,k分別為與X,Y,Z軸同向的單位矢量。
1.1.2不同坐標系下的膠囊位置變換


圖1 膠囊位置在笛卡兒坐標系表示
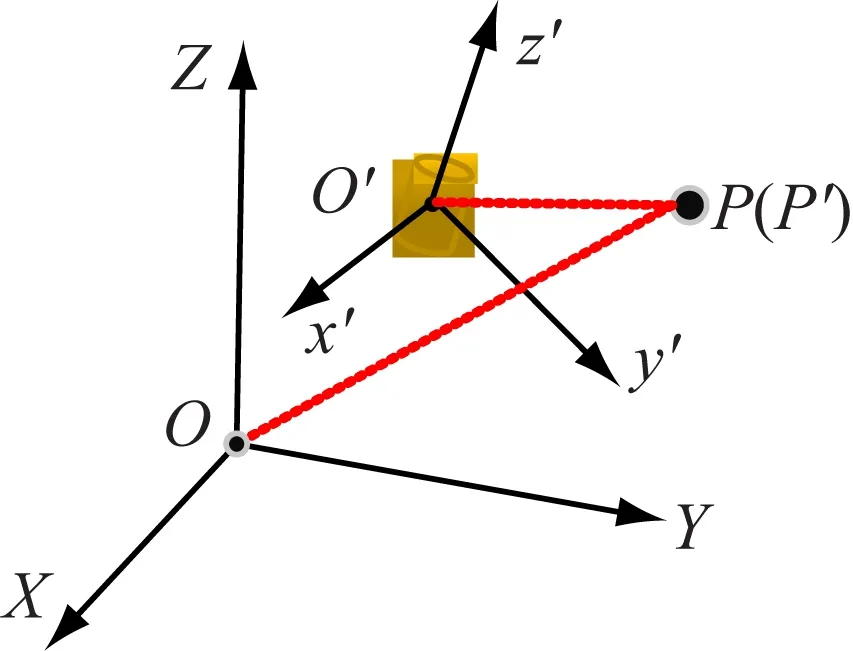
圖2 物體坐標系和全局坐標系下的不同表示
實現(xiàn)同一位置矢量在不同坐標系下的轉換,即膠囊的物理坐標系和全局坐標系的變換,分為兩個步驟[17]:

(2)
式中:
(3)
(x1,y1,z1)為物理坐標系的原點O′在全局坐標系的坐標值。

圖3 全局坐標系下物體坐標系平移
(4)

圖4 物體坐標系在全局坐標系下旋轉變換
由以上兩步可知,完成矢量從全局坐標系直接變換到最終物理坐標系的完整數(shù)學表達過程為
(5)
旋轉矩陣R為正交矩陣,R的行列式為單位1,滿足RTR=RRT=I,從而得出旋轉矩陣的逆矩陣是它的轉置矩陣,即
R-1=RT
(6)
這為簡化了旋轉矩陣的逆矩陣的求解。旋轉矩陣有多種構造形式,還可用來描述膠囊的方位。
1.1.3膠囊的方向描述
膠囊在空間中的狀態(tài)除了位置信息,還有膠囊的鏡頭對準方向,求解膠囊的鏡頭方向,類似于不同坐標系的變換,等價為一種旋轉變換。設鏡頭方向矢量P在坐標系O-XY中用(xyz)T表示,旋轉后在坐標系O-XYZ中用矢量(xyz)T表示,得到:
[x1y1z1]=[xyz]·R
(7)
式中:R為3行3列的旋轉矩陣。
1.2 永磁鐵磁通量密度數(shù)學模型

(8)
式中:Blx,Bly,Blz是永磁體在磁傳感器M處3個軸上的正交分量;i,j,k分別是X,Y,Z軸方向的單位矢量;μr為相對導磁率;MT表征永磁體磁化強度;Pl為第M個傳感器的位置相對于膠囊磁體中心的位置,Rl為Rl的模,即

圖5 磁定位示意圖
將式(8)展開得到:
(9)
(10)
(11)
m2+n2+p2=1
(12)
(13)
(14)
(16)
式中:N>5,總目標誤差等于誤差之和,即:
E=Ex+Ey+Ez
(16)
1.3 膠囊內(nèi)窺鏡五維定位算法
方程組求解問題轉化為求解系統(tǒng)總誤差E,為非線性最小二乘問題,可以選擇非線性優(yōu)化算法求解。實現(xiàn)實時定位,必須要使用高效率的算法,而且要有很好的收斂性和穩(wěn)定性。通過比對發(fā)現(xiàn)Levenburg -Marquardt算法[20]速度快、收斂性高,因此本文選用Levenburg-Marquardt算法求解系統(tǒng)總誤差E。
2 試驗與仿真
驗證理論模型設計長寬為15 cm×15 cm,傳感器間距為68 mm的9×9磁傳感器平面陣列為原型樣機,系統(tǒng)通過ARM板采集數(shù)據(jù)發(fā)送上位機運算后完成實時跟蹤顯示,如圖6所示。磁傳感器陣列標定磁激勵源相關的常數(shù)BT和位置方向,提升系統(tǒng)的定位精度。磁定位系統(tǒng)以傳感器陣列的中心傳感器5為原點建立全局笛卡爾坐標系,系統(tǒng)標定時標定板高度統(tǒng)一設置為78 mm。

圖6 傳感器陣列定位系統(tǒng)
設計的磁定位系統(tǒng)樣機跟蹤定位圓柱形永磁體,系統(tǒng)通過測試標定板預制的107個固定采樣點進行定向和定位檢測。如表1所示,標定前測試的107個點的位置平均總誤差為4.593 2 mm,平均角度總誤差為6.487 5°;系統(tǒng)標定后的107個點的位置平均總誤差為1.369 9 mm,平均角度總誤差為3.395 2°。通過對標前后的三軸方向誤差對比(見圖7和圖8)和角度總誤差對比(見圖9和圖10)結果可知,定位精度提高3.3 mm,角度精度提高3.1°
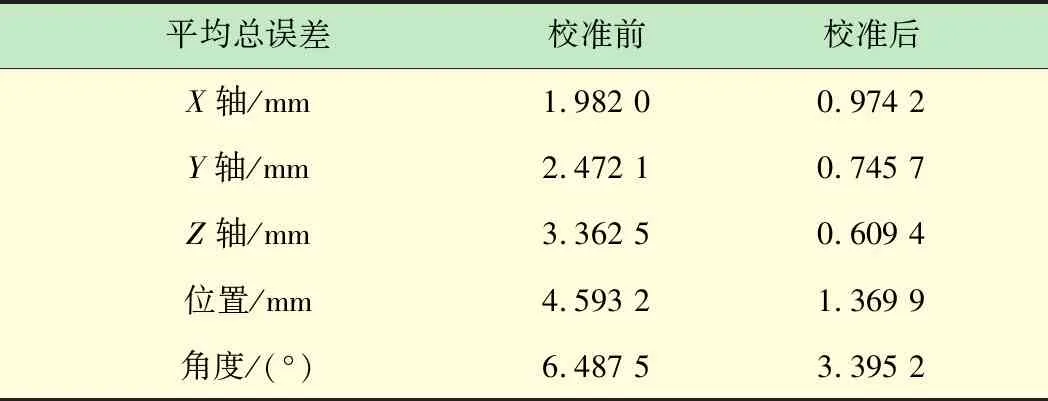
表1 校準前后數(shù)據(jù)誤差對比

圖7 標定前各軸位置誤差和總誤差(107個點)

圖8 標定后各軸位置誤差和總誤差(107個點)

圖9 標定前方向誤差(107個點)

圖10 標定后方向誤差(107個點)
根據(jù)實時三軸位置和兩維角度信息建立一個永磁體模擬三維空間,可以直觀地顯示永磁體的三維位置和兩維角度信息。五維定位仿真系統(tǒng)由微軟Direct eXtension開發(fā)環(huán)境開發(fā),本文在原點位置設置3個不同的角度以顯示動態(tài)仿真效果。如圖11所示,永磁鐵的實際位置和仿真效果比對,圖11(a)為磁鐵向左傾斜一定角度的實物和仿真比對圖,圖11(b)和圖11(c)分別為垂直和向右傾斜一定角度的實物和仿真效果比對圖。

(a)(b)(c)
圖11 五維磁定位仿真系統(tǒng)效果
通過對比,發(fā)現(xiàn)磁體真實的物理形態(tài)與模擬三維空間的形態(tài)一致,效果真實可靠,達到三維重建的目的。
3 結 語
針對膠囊內(nèi)窺鏡技術缺乏精確定位的缺點,本文提出一種新型五維磁定位膠囊內(nèi)窺鏡,實現(xiàn)在采集圖像同時磁定位跟蹤,此外醫(yī)生還可以根據(jù)拍攝圖片和五維位置信息(三維位置,兩維方向參數(shù))對消化道三維重建。首次將實時磁定位的膠囊內(nèi)窺鏡技術由理論付諸實踐,在完成膠囊內(nèi)窺鏡設計的基礎之上制作了15 cm×15 cm大小的磁傳感器平面陣列,可在采集圖像的同時可對膠囊實時跟蹤,定位精度可達1.37 mm,定向精度可達3.4°。磁定位系統(tǒng)中的軸向充磁的磁環(huán)因為成本和工藝問題正在與外協(xié)溝通,實驗中的磁激勵源暫時由圓柱形汝鐵硼永磁體替代,后期磁環(huán)做出來后可以替換,不影響系統(tǒng)定位功能。動物實驗及推廣已經(jīng)得到市科學技術局支持,膠囊外殼和磁環(huán)加工等解決后就可以進行下一步動物實驗工作。