基于偏振信息融合的背景抑制方法評價
2019-04-03 05:53:48張曉杰
上海航天 2019年1期
張曉杰,劉 莎,劉 翔
(1.中國航天科技集團有限公司 紅外探測技術研發中心,上海 201109; 2.上海航天控制技術研究所,上海 201109)
0 引言
實現復雜環境下的背景抑制是紅外目標檢測的關鍵步驟與難點之一,國內外學者對此進行了廣泛研究[1-2]。對空中或海面紅外目標圖像而言,由于目標及其周圍環境存在熱交換,加之空氣對熱輻射的散射和吸收作用,目標信號受自然背景(如云層、海浪)的干擾較大,因此在紅外圖像中,目標和背景的對比度較差,且目標邊緣模糊,這給紅外目標的檢測帶來了較大困難。
近年來,作為一種新型探測技術,紅外偏振成像技術在目標探測與識別領域得到越來越多的關注[3-5]。不同于紅外強度信息,偏振信息作為目標的一種本征信息,由目標自身的物理特性所決定。研究表明:相比于自然背景,人造目標通常具有更強的偏振特性,在某些特定場景下,通過紅外偏振成像有望獲得更高對比度的圖像[6-9]。實際應用中,通過計算目標的Stokes矢量,可進一步得出目標的偏振度和偏振角信息。偏振度和偏振角兩者共同構成了對目標偏振特性的完整描述。
然而,與紅外強度圖像相比,單一的偏振度或偏振角圖像在提升圖像信雜比方面并無明顯優勢,這不利于復雜背景下紅外目標檢測的實現。在紅外偏振信息處理方面,文獻[10-11]通過對多幅偏振參量圖像進行融合或偽彩色再現,雖在一定程度上增加了圖像的信息量,增強了圖像的視覺效果,但無法達到抑制圖像背景噪聲的目的。因此,本文針對復雜海空背景下的紅外偏振圖像,提出一種綜合利用偏振度和偏振角信息來最大化目標與背景差異的方法,以期達到抑制背景、提升圖像信雜比的目的。
1 目標偏振成像原理
1.1 偏振信息表征
由菲涅爾反射定律可知,光從光滑介質表面反射會產生偏振效應。因此,目標輻射除攜帶強度信息外,還攜帶與目標特性(如材料介電常數、表面粗糙度、含水量)相關的偏振信息,同時,大氣散射會改變環境和目標的偏振特性。根據基爾霍夫輻射定律,熱輻射也表現出偏振效應。紅外偏振信息可對目標在像素級、特征級進行更細膩的刻畫與表述。
偏振態可采用Stokes矢量來描述。Stokes矢量是用于描述非相干光偏振狀態的四元素向量,包含4個參量,分別用I,Q,U,V來表示,對于確定量的入射的非相干輻射,有
(1)
式中:I為成像系統接收的總輻射強度;Q為水平和垂直偏振方向輻射強度之差;U為對角線方向輻射強度之差;V為左、右旋圓偏振光強度之差。Stokes矢量的4個參量均是光強的時間平均值,具有強度的量綱,可直接被探測器探測。
實際應用中,圓偏振分量通常很小,相對于儀器誤差而言可忽略不計。因此,通常假定V=0。
偏振態可用線偏振度D和偏振角A這2個參數來表征,即
(2)
(3)
式中:D是范圍為[0,1]的無量綱數,D=0表示非偏振光,D=1表示完全偏振光,其他情況為部分偏振光;A為入射光的偏振方向相對于參考方向的夾角,對于部分偏振光,則是能量最大的偏振方向與參考方向的夾角。
1.2 偏振成像信息解算
用Mueller矩陣M來描述光波偏振態的傳輸特性。對于任意線性光學系統,假設其入射光的Stokes矢量為Sin,出射光的Stokes矢量為Sout,當光束通過該線性系統后,該線性系統對光的作用可以一個4×4的Mueller矩陣表示,即
(4)
與參考方向成α角的理想線偏振片的Mueller矩陣可表示為
(5)
則出射光強是α的函數,用I,Q,U可表示為
(6)
因此,通過多次改變線偏振片的角度α,構建多元方程,即可反解得到Stokes矢量參數,將其進一步代入式(2),(3),可得到目標場景的偏振度和偏振角信息。
2 偏振信息融合的背景抑制
2.1 偏振度和偏振角聯合特性分析
完全偏振光的偏振度為1,而自然界中的光通常是部分偏振光,可被看作自然光和線偏振光的混合,表現為橢圓偏振光。此時,偏振度的值介于0~1,偏振角α則表示能量最大的偏振方向與參考方向的夾角。實際場景中偏振度和偏振角信息分別代表偏振程度的大小和方向,兩者共同描述了目標的完整偏振特性,如圖1所示。圖中:a表示偏振橢圓中偏振能量最大的方向;b表示偏振橢圓中偏振能量最小的方向。
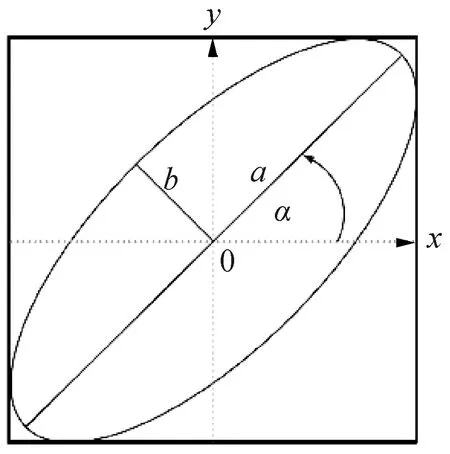
圖1 橢圓偏振光示意Fig.1 Schematic diagram of elliptically polarized light
通常認為人造目標與自然背景的偏振特性存在一定差異,偏振度和偏振角參數可用于表征目標和背景的狀態特性。以典型天空背景下的無人機目標為例,其紅外強度圖像、偏振度圖像與偏振角圖像如圖2所示。由圖可見:相比于紅外強度圖像,偏振度圖像與偏振角圖像中的云背景噪聲得到了更好的抑制,圖像信雜比均有一定提升,但背景噪聲的影響仍難以忽略。
對紅外目標檢測而言,如何有效地融合偏振度和偏振角信息,進一步提升圖像信雜比,是后續目標提取與分割的關鍵。現有偏振信息處理方法直接在像素級對偏振圖像與強度圖像進行融合或偽彩色再現,在一定程度上提升了圖像的視覺效果,但由于未考慮偏振度和偏振角信息的內在聯系,融合后的圖像難以獲得滿意的信雜比提升效果。
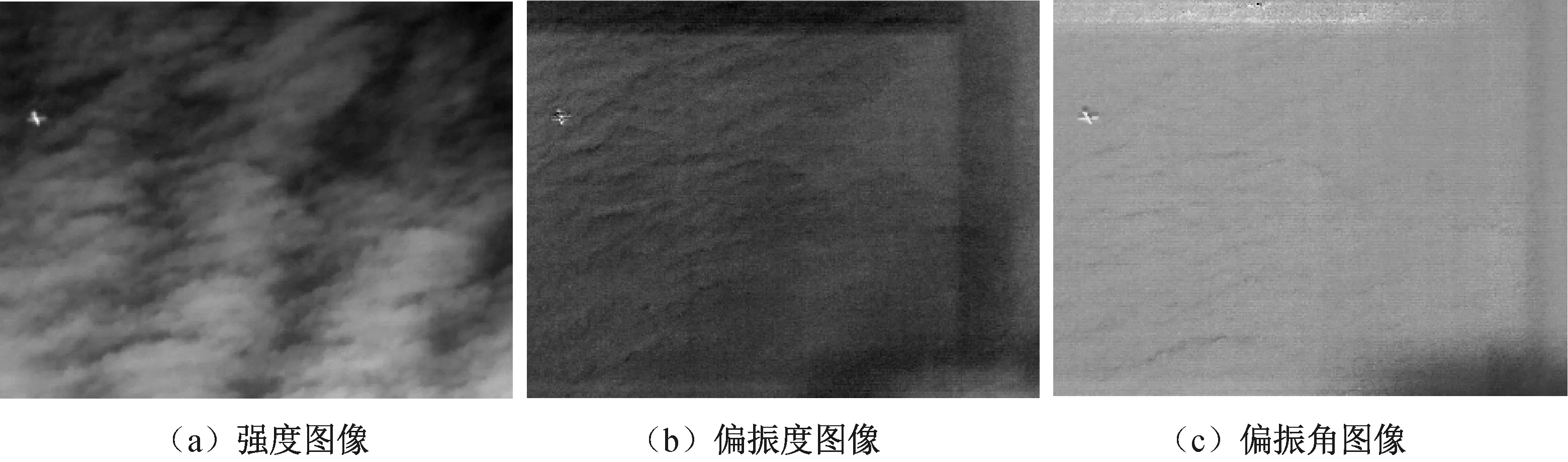
圖2 天空背景下無人機紅外偏振圖像Fig.2 Infrared polarization image of UAV against sky background
將圖2中圖像各像素點的偏振度和偏振角信息在極坐標系中同時表示出來,各點的分布情況如圖3所示。圖中:極坐標系的半徑代表偏振度;方向代表偏振角。其中:綠色區域積聚了大量的背景像素,其偏振度約在0~0.035;目標點的分布相對孤立,其偏振度約在0.02~0.07;目標與背景的偏振角覆蓋范圍較廣,在-300°~60°。單一的偏振度或偏振角圖像中,目標與背景仍存在一定的數值重合區域,這給目標檢測過程中目標與背景的分類帶來困難。因此,需基于偏振度與偏振角的聯合分布特征,尋找合適的特征提取方法,進一步擴大目標與背景的差異,抑制圖像中復雜環境背景的影響,達到增強圖像信雜比的目的。
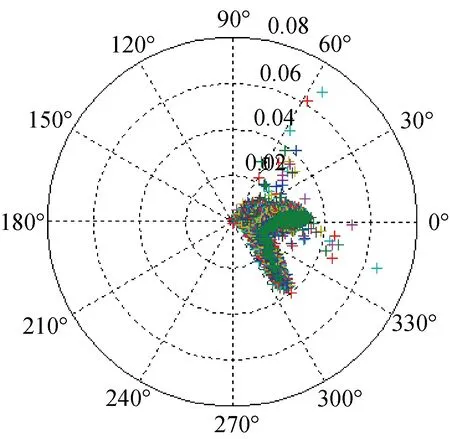
圖3 偏振度與偏振角的極坐標系聯合分布Fig.3 Joint distribution of polarization degree and angels in polar coordinate system
2.2 偏振信息融合背景抑制方法
考慮目標偏振度和偏振角信息的聯合分布特征,提出如下基于偏振信息融合的背景抑制方法,即
IH=ID×(IA-uA)×(IA-uA)
(7)
式中:IH為偏振度和偏振角合成之后的圖像;ID為偏振度圖像;IA為偏振角圖像;uA為偏振角圖像的均值。
研究結果表明:偏振角參數圖像能較好地描述物體不同的表面取向,是一種能較好地從自然背景中凸現人工目標特征的表征手段。對海空背景紅外偏振圖像而言,因其背景較為單一,為大面積的云層或海水,故其偏振特性的分布相對均勻。為更好地抑制目標圖像中的背景雜波信號,可以均值uA作為背景偏振角信息的估計值,用偏振角減去其均值。由于相減所得殘量圖像中可能存在負值,因此將其平方后取其幅度信息。
此外,實際物體的偏振特性影響因素復雜,通常為部分偏振。偏振度是一個介于0~1的無量綱數,用于反映部分偏振光的偏振程度,偏振角則表示部分偏振光中能量最大的偏振方向與參考方向的夾角。當物體的偏振度過小時,偏振橢圓接近于圓,此時偏振角的意義并不大,也即在表征物體偏振特性的差異時,偏振度越大,偏振角的物理意義越明顯。因此,式(7)中將偏振度作為偏振角信息的加權系數,可進一步抑制背景的干擾。
3 基于紅外偏振成像的目標檢測算法
基于以上分析,將偏振度和偏振角信息相結合,進一步給出如下基于紅外偏振信息融合的目標檢測算法步驟。
1) 空間配準。針對獲取的多角度偏振圖像,以0°,60°,120°為例,完成基于互信息的空間配準。
將圖像A和B的互信息FAB定義為
(8)
式中:pA,pB分別為圖像A和B的灰度直方圖;pAB(i,j)為圖像A和B的聯合灰度直方圖;L為圖像的灰度等級。
根據圖像互信息的定義計算3幅多角度偏振圖像兩兩之間的區域互信息,調整變換參數,使互信息最大,即得到配準參數,再根據配準參數校正待配準圖像。
2) 偏振信息解算。按式(9)計算目標場景的Stokes參量I,Q,U,將結果進一步代入式(2),(3),得到偏振度圖像和偏振角圖像。
(9)
3) 針對偏振度圖像與偏振角圖像,進行基于偏振信息合成的背景抑制。背景抑制后的圖像由式(7)計算得出。
4) 進行圖像閾值分割,完成目標提取。
4 實驗結果與分析
為驗證所提出的基于偏振信息融合的背景抑制方法的有效性,針對大量海面與天空背景下的典型目標進行實驗。天空和海面背景下無人機與船只圖像的算法分析結果如圖4~7所示。由圖可見:單一的偏振度或偏振角圖像的背景抑制效果隨場景的變換而有所不同,而偏振信息融合結果則相對穩定,取得了較好的背景抑制效果。圖4和圖5分別對應空中無人機由近及遠所成的2組圖像。紅外強度圖像中,天空云層背景噪聲較強。利用所提出的偏振信息融合方法,在綜合考慮目標與背景的偏振度與偏振角信息后,偏振信息融合圖像中的云層背景得到大幅抑制。圖6和圖7分別對應海面船只由近及遠所成的2組圖像。紅外強度圖像中,目標船只與海面背景的灰度差異不大,邊緣相對模糊。經偏振信息融合處理后,海面背景分量得到很好的抑制,目標船只得到凸顯,邊緣清晰,圖像整體對比度得到大幅提升。
為進一步定量分析本文方法的有效性,選用信雜比(RSN)和信雜比增益(GSNR)作為評價依據,其定義分別為
(10)
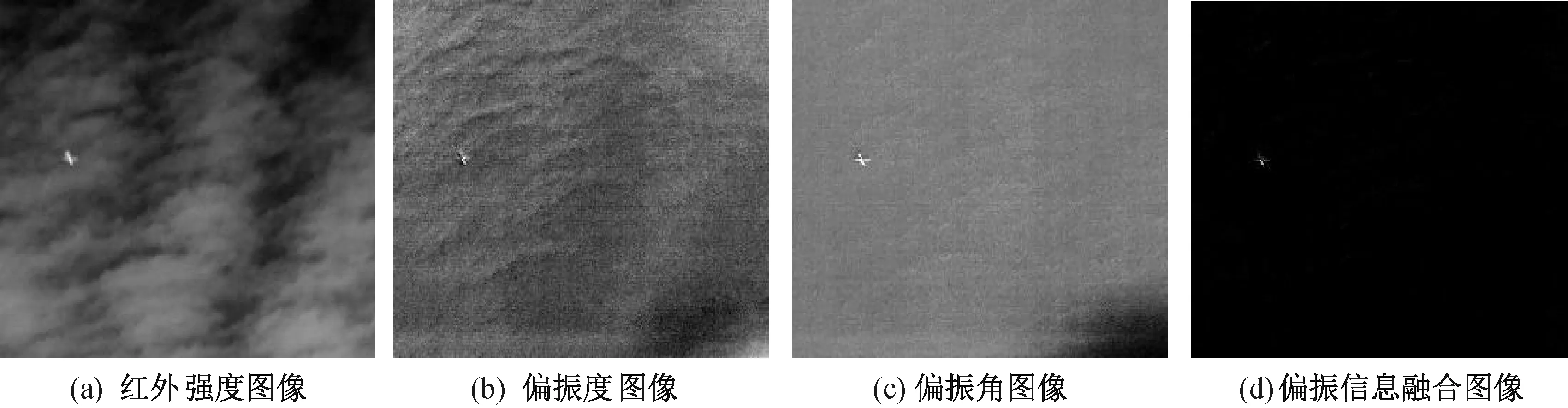
圖4 近距離天空背景下無人機偏振圖像比較Fig.4 Comparison of close-range UAV polarimetric images against sky background
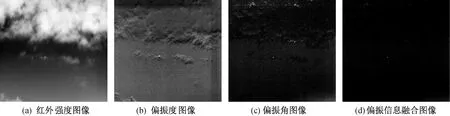
圖5 遠距離天空背景下無人機偏振圖像比較Fig.5 Comparison of far-range UAV polarimetric images against sky background

圖6 近距離海面背景下船只偏振圖像比較Fig.6 Comparison of close-range ship polarimetric images against sea background

圖7 遠距離海面背景下船只偏振圖像比較Fig.7 Comparison of far-range ship polarimetric images against sea background
式中:Gt為圖像中目標的平均灰度值;Gb為背景的平均灰度值;σb為背景的灰度標準差;RSNO為經偏振信息融合處理后的圖像信雜比;RSNI為強度圖像的信雜比。
圖4~7中各圖像的信雜比和融合圖像相對于紅外強度圖像的信雜比增益見表1。由表可知:利用本文提出的偏振信息融合方法能較好地抑制背景與噪聲,平均信雜比增益可達3~29倍,更有利于后續的目標分割與提取。

表1 圖像信雜比定量比較
5 結束語
本文提出了一種基于偏振度和偏振角信息融合的背景抑制方法,利用目標與背景的偏振特性差異大幅提升了目標圖像的信雜比,更有利于后續對紅外目標的分割與提取。相比于傳統紅外圖像背景抑制方法,該方法的背景抑制性能不依賴于目標的大小、形狀或運動信息。該方法適應性強,易于實現,為復雜云層或海面背景下的目標檢測與跟蹤提供了一條技術途徑。后續可深入挖掘目標多維偏振信息的內在關聯,優化融合框架,進一步提升算法的背景抑制性能。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
當代陜西(2020年14期)2021-01-08 09:30:42
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32