伺服控制系統電流及速度環自動參數辨識分析
2019-04-08 06:29:02尹顯明鐘倫超
自動化儀表 2019年3期
關鍵詞:調試
張 秘,尹顯明,鐘倫超,劉 洋,尹 君
(1.西南科技大學科學與制造工程學院,四川 綿陽 621000;2.西南科技大學工程技術中心,四川 綿陽 621000;3.清華大學深圳研究生院,廣東 深圳 518000)
0 引言

本文采用頻率掃描法在線獲取電機的三相電阻及電感,根據所得到的參數建立電機的幅頻裕度曲線。然后根據系統帶寬要求,同時利用電流跟隨方式,對系統比例積分(proportional integral,PI)參數進行調節,從而解決了不同電機在運行條件不一樣時,PI參數與電機參數不匹配的問題。在速度環的處理上,采用頻率激勵方式,獲取速度環的幅頻裕度曲線。根據系統帶寬設計要求,調整相位裕度與增益裕度,從而得到速度環的PI參數。
1 電流及速度環控制方法
1.1 系統數學模型
針對所有反電勢為正弦波的電機,均可按照永磁同步電機的控制。忽略電機的諧波、渦流和磁滯損耗,在電機調速系統中,與轉速相關的反電動勢項在電流的瞬變過程中相當于一個變化較慢的擾動,所以電流環PI參數設計過程中可以暫不考慮反電動勢項的影響。對于一個理想的轉矩控制,id=0。電機的電壓、轉矩和運動數學模型如下[9-10]:
(1)
(2)
(3)
(4)
式中:ud、ua為定子d、q軸的電壓;id、ia為定子d、q軸的電流;R為定子電阻;Ld、La為定子的電感;P為電機的極對數;ωr為轉子的角速度;Ψ為磁鏈;ed、ea為反電動勢;Te為電磁轉矩;Tl為負載轉矩;B為摩擦因數;J為轉子轉動慣量;Ts為電流采樣周期;idc為d軸控制電流,idc=0;iac為q軸控制電流。
1.2 傳統的電流環參數辨識
傳統電流環控制結構如圖1所示。
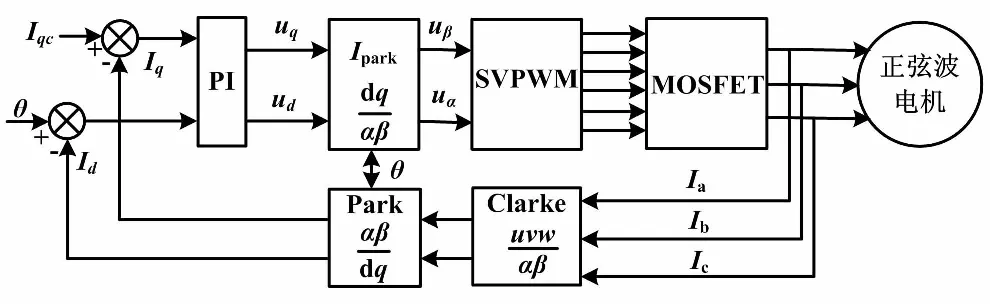
圖1 傳統電流環控制結構圖Fig.1 Structure diagram of conventional current loop control
電流檢測單元檢測到的三相電流Ia、Ib、Ic(Ia+
Ib+Ic=0[11])經過Clarke變換后將三相交流轉換為αβ兩相靜止坐標系,然后經過Park變換轉換到dq坐標系下的勵磁分量id和轉矩分量ia。分別設計控制器進行勵磁控制和轉矩控制,將得到的勵磁控制量ud和轉矩控制量ua進行逆Park變換得到uα和uβ,最后經空間矢量脈寬調制得到六路脈寬調制(pulse width modulation,PWM)占空比,實現調制和控制過程。
對電流進行采樣的時間可選在PWM波各開關周期的起始時刻[12],也能選在開關周期的中點[13]。在起點時刻采集能夠獲得諧波成分相對較少的基波電流值,有利于實現高精度的電流閉環控制。傳統的電流環PI參數多采用手動調試,PI控制將采集到的電流與給定電流比較。受硬件條件限制,當前周期計算的ud和ua要等到下個周期才能施加,等到下一周期結束時,電流才有可能跟蹤上本周期的電流指令。在兩個控制周期內,q軸電流達到控制值。
1.3 改進的電流環參數辨識
改進的電流環控制主要是基于參數的辨識,然后將辨識得到的參數設計控制器與反電勢補償。改進電流環控制結構如圖2所示。
在(k-2)Ts~kTs時間間隔內,得到如式(5)、式(6)所示的q軸數學模型。
(5)
(6)

圖2 改進電流環控制結構圖Fig.2 Structure diagram of improved current loop control
對電流環進行分析,將式(5)與式(1)相減,得:
(7)
將式(6)與式(2)相減,得:
(8)
從式(7)、式(8)可知,需要得到電機的電阻與電感參數,其中電感的辨識需要參數電阻R和磁鏈Ψ,在此采用正弦掃頻激勵完成電流環的系統辨識過程。
電流環掃頻函數選取式(9)所表示的函數。
(9)
式中:fl為掃頻頻率范圍的下限;fh為掃頻頻率范圍的上限;t1為掃頻過程的持續周期。
根據電機的阻抗、感抗公式,推導式(10)表示的函數。
(10)
式中:f為掃頻頻率;La為a相電感;ia為a相電流;Ra為a相電阻;U1根據不同扇區確定。
為了方便進行電流環辨識,掃頻過程開始于低頻段,并根據式(9)逐漸提高頻率。一旦達到最高頻率fh,就逐漸減小至最低頻率fl。
1.4 改進的速度環參數辨識
由式(1)、式(4)可得:
(11)
速度環框圖如圖3所示。

圖3 速度環框圖Fig.3 Block diagram of speed loop

2 仿真驗證
忽略電機的諧波,以掃頻函數作為電流環閉環轉矩控制量ua,采集原始電流等信號。由式(10)得到各相參數,經過坐標變換得到電流轉矩分量ia,利用Matlab對原始數據進行處理。跟隨掃頻函數的電流波形如果圖4所示。

圖4 跟隨掃頻函數的電流波形Fig.4 Current waveform following sweep frequency function
從圖4可以看出,所用電機模型較好地反映了原始數據,仿真中協方差和丟失數據也都在允許范圍內;還可以根據系統帶寬要求,結合跟隨效果,適當加大系統帶寬。
利用圖4的控制結構,結合電流環的仿真參數,對速度環進行仿真,給定速度為4 000 r/min。電流環辨識下的速度仿真波形如圖5所示。
3 試驗結果
試驗采用Maxon EC系列無刷電機,處理器采用TI6000。調試電流環時電機空載,調試速度環時讓電機帶載3 kg。試驗數據通過數字信號處理(digital signal processing,DSP)傳送到計算機。
速度波形、電流波形如圖6、圖7所示。給定速度指令為4 000 r/min,采集電機實際速度與給定速度、實際電流與給定電流。從圖6、圖7可以看出,電機速度環具有很好的動態性能,未出現振蕩,適合電傳操縱系統的實際運用,同時,實際速度與仿真速度均能展示電機的速度動靜態性能。

圖6 速度波形Fig.6 Speed waveform

圖7 電流波形Fig.7 Current waveform
4 結束語
本文提出了一種基于掃頻方法的正弦波電機電流與速度環控制方法,利用不同正弦頻率信號作為響應信號,同時在測試過程中給予由低到高的的測試激勵電流。相對于PI試湊調試[14],該方法可實現對不同電機的快速調試,根據電流跟隨效果決定參數是否合適,同時系統不會出現超調與振蕩,動靜態性能明顯提高。相對于傳統的電流預測方法,本文方法能有效避免控制周期的延時。仿真和試驗結果都顯示出基于掃頻的控制方法良好的動靜態性能,具有很強的工程使用價值,值得應用推廣。
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
石油化工建設(2018年1期)2018-07-10 09:49:50
制造技術與機床(2017年6期)2018-01-19 02:41:21
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
石油化工建設(2015年5期)2015-12-01 04:17:19
電子設計工程(2015年3期)2015-02-27 12:04:00
