如何選擇合適的編程方法
2019-04-10 12:27:48殷超
科學(xué)與技術(shù) 2019年8期
殷超

摘要:PLC技術(shù)在工業(yè)生產(chǎn)中占據(jù)重要的地位,在職業(yè)技術(shù)教學(xué)中讓學(xué)生能夠進(jìn)行程序設(shè)計(jì)是教授的重點(diǎn)。本文探討了常用的兩種編程方法,并進(jìn)行了比較,以便讓學(xué)生在實(shí)際應(yīng)用中合理的選擇。
關(guān)鍵詞:PLC;經(jīng)驗(yàn)設(shè)計(jì)法;順序控制設(shè)計(jì)法
上世紀(jì)60年代末,它不斷吸收微計(jì)算機(jī)技術(shù)使之功能不斷增強(qiáng),逐漸適合復(fù)雜的控制任務(wù)。隨著微電子技術(shù)、計(jì)算機(jī)技術(shù)和數(shù)據(jù)通信技術(shù)的飛速發(fā)展、微處理器的出現(xiàn),以及流程加工行業(yè)(如汽車制造業(yè))對(duì)生產(chǎn)流程迅速、頻繁變更的需求,PLC技術(shù)出現(xiàn)并快速發(fā)展。
目前,PLC在小型化、大型化、大容量、強(qiáng)功能等方面有了質(zhì)的飛躍,使早期的PLC從最初的邏輯控制、順序控制,發(fā)展成為具有邏輯判斷、定時(shí)、計(jì)數(shù)、記憶和算術(shù)運(yùn)算、數(shù)據(jù)處理、聯(lián)網(wǎng)通信及PID回路調(diào)節(jié)等功能的現(xiàn)代PLC。
一、常用的編程方法
正是由于PLC技術(shù)在目前的工業(yè)生產(chǎn)中占據(jù)了極其重要的地位,因此在我校的多個(gè)專業(yè)都開設(shè)了PLC技術(shù)這門課。掌握PLC技術(shù)最終的目的是為了讓學(xué)生能夠進(jìn)行程序設(shè)計(jì),因此在常規(guī)的教學(xué)中所教授的設(shè)計(jì)方法包括經(jīng)驗(yàn)設(shè)計(jì)法、根據(jù)繼電器電路設(shè)計(jì)梯形圖和順序控制設(shè)計(jì)法三種。其中,根據(jù)繼電器電路設(shè)計(jì)梯形圖一般用于改造繼電器控制系統(tǒng),在應(yīng)用中有一定的局限性,所以我們把經(jīng)驗(yàn)設(shè)計(jì)法和順序控制設(shè)計(jì)法作為教授的重點(diǎn)。下面我們先對(duì)這兩種方法做一下簡(jiǎn)要的介紹:
1、經(jīng)驗(yàn)設(shè)計(jì)法
經(jīng)驗(yàn)設(shè)計(jì)法顧名思義就是依據(jù)設(shè)計(jì)者的設(shè)計(jì)經(jīng)驗(yàn)進(jìn)行設(shè)計(jì)的方法。經(jīng)驗(yàn)設(shè)計(jì)法設(shè)計(jì)程序時(shí),將生產(chǎn)機(jī)械的運(yùn)動(dòng)分成各自獨(dú)立的簡(jiǎn)單運(yùn)動(dòng),分別設(shè)計(jì)這些簡(jiǎn)單運(yùn)動(dòng)的控制程序,再根據(jù)各自獨(dú)立的簡(jiǎn)單運(yùn)動(dòng),設(shè)置必要的聯(lián)鎖和保護(hù)環(huán)節(jié)。這種設(shè)計(jì)方法要求設(shè)計(jì)者掌握大量的控制系統(tǒng)的實(shí)例和典型的控制程序。設(shè)計(jì)程序時(shí),還需要經(jīng)過反復(fù)修改和完善,才能符合控制要求。
2、順序控制設(shè)計(jì)法
所謂順序控制設(shè)計(jì)法就是針對(duì)順序控制系統(tǒng)的一種專門的設(shè)計(jì)方法。這種設(shè)計(jì)方法很容易被初學(xué)者接受,對(duì)于有經(jīng)驗(yàn)的工程師,也會(huì)提高設(shè)計(jì)的效率,程序的調(diào)試、修改和閱讀也很方便。PLC的設(shè)計(jì)者們?yōu)轫樞蚩刂葡到y(tǒng)的程序編制提供了大量通用和專用的編程元件,開發(fā)了專門供編制順序控制程序用的功能表圖,使這種先進(jìn)的設(shè)計(jì)方法成為當(dāng)前PLC程序設(shè)計(jì)的主要方法。
二、經(jīng)驗(yàn)設(shè)計(jì)法與順序控制設(shè)計(jì)法的比較
以上對(duì)兩種編程方法做了一下描述,不難發(fā)現(xiàn)這兩種方法各有各的好處。下面我們以例子的形式來看看他們自己的優(yōu)缺點(diǎn)。
假設(shè)小車開始時(shí)停在左限位開關(guān)SQ1處,按下右行起動(dòng)按鈕SB1,小車右行,到達(dá)限位開關(guān)SQ2處時(shí)停止運(yùn)動(dòng),10s后定時(shí)器的定時(shí)時(shí)間到,小車自動(dòng)返回起始位置。
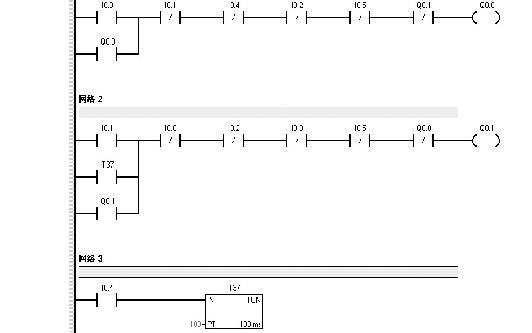
首先采用經(jīng)驗(yàn)設(shè)計(jì)法來看看如何設(shè)計(jì):
為了使小車向右的運(yùn)動(dòng)自動(dòng)停止,將右限位開關(guān)對(duì)應(yīng)的I0.4的常閉觸點(diǎn)與控制右行的Q0.0的線圈串聯(lián)。為了在右端使小車暫停10s,用I0.4的常開出點(diǎn)來控制定時(shí)器T37的線圈,T37的定時(shí)時(shí)間到時(shí),其常開觸點(diǎn)閉合,給控制Q0.1的起保停電路提供起動(dòng)信號(hào),使q0.1線圈通電,小車自動(dòng)返回。小車離開SQ2所在位置后,I0.4的常開觸點(diǎn)斷開。回到SQ1所在位置時(shí),I0.3的常閉觸點(diǎn)斷開,使Y0.1的線圈斷電,小車停在起始位置。
梯形圖如下圖所示:
下面我們?cè)賮砜纯从庙樞蚩刂苼砭幊獭8鶕?jù)題目要求我們可以編寫出下面的順序功能圖以及梯形圖。
從兩種編程方式不難看出:
經(jīng)驗(yàn)設(shè)計(jì)法所編程序看起來較為簡(jiǎn)潔,但需要學(xué)生具有一定的對(duì)問題的理解和分析能力,經(jīng)驗(yàn)的多少?zèng)Q定了所編寫程序的好壞,并且在編寫的過程中還需要經(jīng)過反復(fù)修改和完善,才能符合控制要求。因此,經(jīng)驗(yàn)設(shè)計(jì)法對(duì)學(xué)生來說是一種能力的體現(xiàn),這在學(xué)生在日后的工作中可以不斷加強(qiáng)。順序控制設(shè)計(jì)法,雖然看起來很麻煩,但通過順序控制圖可以很明朗的了解控制過程,學(xué)生只需要知道控制的先后次序便能很快的編寫出循序控制圖,因此,這種方法比較容易讓初學(xué)的學(xué)生掌握。
順序功能圖雖然簡(jiǎn)單,但是使用SCR編程有些問題需要引起重視。
1、控制過程必須一步一步的運(yùn)行,中間需要滿足轉(zhuǎn)換條件才能跳轉(zhuǎn),如果因?yàn)槟承﹩栴}需要緊急停車,這時(shí)該如何處理呢?比如上面所舉得例子,我們看到停車按鈕和過載保護(hù)在順序控制中并沒有體現(xiàn)出來,而這在實(shí)際生產(chǎn)中是必不可少的組成部分,因此在順序控制中我們還提到了一種使用中間繼電器替代狀態(tài)繼電器的方法——使用起保停電路的順序控制梯形圖設(shè)計(jì)法。在這種方法中我們只需要將每個(gè)中間繼電器線圈端加上所要的停止條件即可,而不需要像SCR中那樣,一遇到停止就返回初始步,這樣減少了很多不必要的麻煩。
2、在SCR中由于一步一步之間都是獨(dú)立的,因此有些輸出元件可能在控制過程中多次得電,我們一般都采用了置位復(fù)位指令以減少某一線圈的多次輸出,那么在遇到隨時(shí)停止時(shí),要注意不僅要將中間繼電器斷電,同時(shí)還要將電路中所有的帶置位指令的元件全部復(fù)位。
3、使用SCR指令一定要注意,程序執(zhí)行完畢后必須返回初始,否則最后一個(gè)單元會(huì)不斷的執(zhí)行下去。
總之,不論是經(jīng)驗(yàn)設(shè)計(jì)法還是順序控制設(shè)計(jì)法,各有各的優(yōu)點(diǎn),各有各的缺點(diǎn),因此我們?cè)诮虒W(xué)過程中應(yīng)該根據(jù)學(xué)生的掌握情況,實(shí)時(shí)的改變教學(xué)的側(cè)重點(diǎn),力保學(xué)生能過掌握到一種適合自己的編程方式,以備工作之需。
參考文獻(xiàn)
[1]殷建國(guó).可編程序控制器及其應(yīng)用,機(jī)械工業(yè)出版社,2006 .
[2]廖常初.FX系列PLC編程及應(yīng)用,機(jī)械工業(yè)出版社,2008
[2]廖常初.PLC編程及應(yīng)用,機(jī)械工業(yè)出版社2008
[4]何獻(xiàn)忠.可編程控制器應(yīng)用技術(shù),清華大學(xué)出版社,2007
(作者單位:武漢技師學(xué)院)