基于樹莓派的陪伴機器人多功能整合方法*
2019-04-11 05:21:36李澤宇舒文杰郭鐵峰
科技與創新 2019年6期
李澤宇,李 鑫,舒文杰,王 琛,郭鐵峰
(合肥工業大學 電氣與自動化工程學院,安徽 合肥 230009)
陪伴機器人具有多方面、多功能的特點,然而國內的陪伴類機器人主要著眼于兒童的早教,一般只考慮兒童對話能力的培養,所以常常只具有“人機交互”的功能。同時,陪伴機器人要實現多方面、多功能的特點,就需要對“人機交互”“虛擬成像”“指定跟隨”等多種功能進行整合[1]。一般來說,“人機交互”為了對話的準確、可靠和開源性,會使用安卓系統作為平臺支持,而“指定跟隨”等其他功能強調快速性就會使用其他獨立的系統進行處理。考慮到運行速度、成本、維護等多方面因素,最終導致在多種功能的整合過程中會出現如下的2 個問題:①不同的功能需要的系統環境可能不盡相同,因此存在兩個或者多個系統同時運作的情況。所以不同系統之間,工作的分散性和統一性的合理設計就顯得尤為重要。②對于所需系統環境相似的多個功能,如何將多個功能合理地結合在同一個系統環境中,并構成統一的整體也是整合過程中必須考慮的問題。本文從硬件平臺選擇入手,針對不同的功能使用不同操作系統而產生沖突的問題和同一系統所搭載不同功能而產生的合并問題,對多種功能進行軟件和硬件方面的修改,以實現在同一種硬件平臺上利用不同的系統實現不同的功能,再通過通信手段將它們聯系在一起,形成一個整體,實現整合的目的。
1 整體設計
陪伴機器人采用多模塊、多層次的結構,本文介紹以“人機交互”“虛擬成像”“指定跟隨”為主要的三個功能的整合方法。“人機交互”是指使用者和機器人之間可以進行較為復雜的對話,采用安卓系統作為軟件平臺,結合訊飛開源平臺的方式實現。“虛擬成像”是指借助全息投影的相關技術,在使用者的面前呈現出逼真的3D 幻像,給使用者真實的體驗感,采用安卓系統作為軟件平臺,結合全息投影的方式實現。
“指定跟隨”是指機器人自主對使用者的面部圖像進行捕捉,通過分析處理后控制電機正反轉來實現以恒定的方向面對使用者,增加了機器人的活動性,為全息顯示提供合適角度。由于該功能需要對實際物理設施進行實時控制,對快速性和準確性有著一定的要求,因此采用Linux 系統結合OPENCV 來分析處理實時圖像,并利用處理后的結果直接控制相關硬件設備。
圖1 為整體硬件結構圖,其中,由于上述功能需要的系統環境不盡相同,因此存在兩個系統(安卓系統和Linux 系統)同時運作的情況。系統之間的工作分配、通訊的設計對功能運行的高效性和整合性就很重要。同時,對于所需系統環境相似的兩個功能(“人機交互”和“虛擬成像”),就需要將這兩個功能合理地結合在同一個系統環境中并構成統一的整體。針對上述這兩個問題,本文將設計方法解決,并實現最終整合的要求。
2 功能設計與整合
由于需要基于兩個軟件系統將三個功能整合,形成一個完整、和諧的整體,因此需要依據硬件對每個功能進行針對性的軟件設計和硬件改變。
硬件平臺選擇:Raspberry Pi3,簡稱為樹莓派3,是樹莓派系列第三代產品。它是一款基于ARM 架構的微型電腦主板,以SD/MicroSD 卡位內存硬盤,其可以通過改變卡中所燒寫的系統來實現不同系統的運行。而其主板周圍有4 個USB 接口和一個10/100 以太網接口,可以連接相關的外設。其擁有視頻模擬信號的電視輸出接口和HDMI 高清視頻輸出接口,同時內置WiFi、藍牙等多種模塊[2]。
基于樹莓派3 的這些硬件可以實現運行不同系統、設計編寫程序、應用不同外設等功能,因此使用樹莓派3 作為基礎硬件平臺可以有針對性地解決整合過程中的問題。本文將介紹使用兩塊樹莓派3 開發板(樹莓派A 和樹莓派B)作為硬件平臺并進行整合的方法。
2.1 樹莓派A
將樹莓派A 設置為“人機交互”和“虛擬成像”兩大功能的實現平臺,針對兩個功能所需要的相關軟、硬件條件對樹莓派A 進行修改:①在MicroSD 卡中移植并燒寫安卓7.0系統;②利用樹莓派A 自帶的WiFi、藍牙模塊鏈接互聯網并對局域網進行設置;③利用樹莓派A 自帶的USB 接口鏈接麥克風模塊、無線控制器、U 盤等;④使用HDMI 接口將樹莓派A 與顯示屏相連接,并放置投影用全息膜。
在硬件條件設置完畢后,重新設計編寫軟件程序,將“人機交互”“虛擬成像”兩大功能移植適配到樹莓派A 上。
2.1.1 人機交互功能
2.1.1.1 硬件方面
由樹莓派A 連接的麥克風模塊采集使用者的語音,并將數據傳送給樹莓派A。數據經過樹莓派A 內部安卓程序的處理后,由樹莓派A 內置的WiFi 模塊經過互聯網傳輸給科大訊飛開源的語音技術平臺,實現樹莓派A 與互聯網的鏈接與數據交換和傳送GPS 坐標的功能,并從網絡平臺處獲取反饋數據,傳送回樹莓派A[3]。其中的安卓程序對反饋信息進行識別、處理、篩選后,將需要播放的語音信息傳送給樹莓派A 連接的揚聲器,播放針對使用者所提問的語音回答[3]。圖2 為人機交互功能結構框圖。
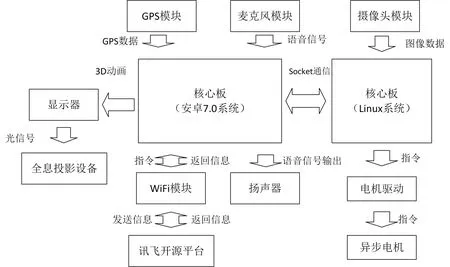
圖1 整體硬件設計圖

圖2 人機交互結構框圖
2.1.1.2 軟件方面
借助科大訊飛所提供的開源的語音技術平臺,在安卓系統平臺的基礎上利用Android Studio 等集成的安卓開發工具使用JAVA 編寫APK,實現對使用者語音的捕捉、轉化成字符、傳輸至服務器處理、接收處理反饋的結果、對反饋的字符篩選最后轉成語音播放的功能[4],針對某些特定的關鍵字在識別后會通過Socket 通信基于局域網和TCP/IP 的協議發送至另一塊搭載Linux 系統的樹莓派并作出響應。圖3 為人機交互功能的流程圖。
2.1.2 虛擬成像功能
全息投影技術也稱虛擬成像技術,是利用干涉和衍射原理記錄并再現物體真實三維圖像的技術。本文中使用的全息膜實現在無論光源是否充足的情況下,都能透過正面直接觀看影像。這種投影的方式使用特殊的屏幕,屏幕本身近乎透明,但是卻可以相當清晰地表現出投影內容。在光源和圖形控制得當并且觀看角度固定時,可以有亂真的立體效果。
2.1.2.1 硬件方面
圖4 為投影原理圖。要實現全息投影(全息投影膜)的合理使用,全息投影膜必須包含以下幾個部分:光源、鏡面圖像、全息投影膜和相關的角度[5]。全息投影的光源部分以樹莓派A 為平臺,并利用HDMI 接口與賽擎7 寸顯示屏相連接,顯示屏中的圖像作為全息投影的光源。結合45°反射原理,將上方顯示屏的圖像反射到使用者面前,同時使全息投影膜后方的光損耗較小,透過膜達到使用者面前,兩束光結合給予人視覺上的錯覺。
2.1.2.2 軟件方面
全息投影功能的軟件部分以樹莓派A 為平臺,并對樹莓派A 中編寫的安卓程序添加Vedioview 功能,來播放和切換由Mikumikudance 制作的動畫[5]。通過上述方法,可以將“人機交互”“虛擬成像”兩個功能在安卓平臺的基礎上整合于樹莓派A 中。
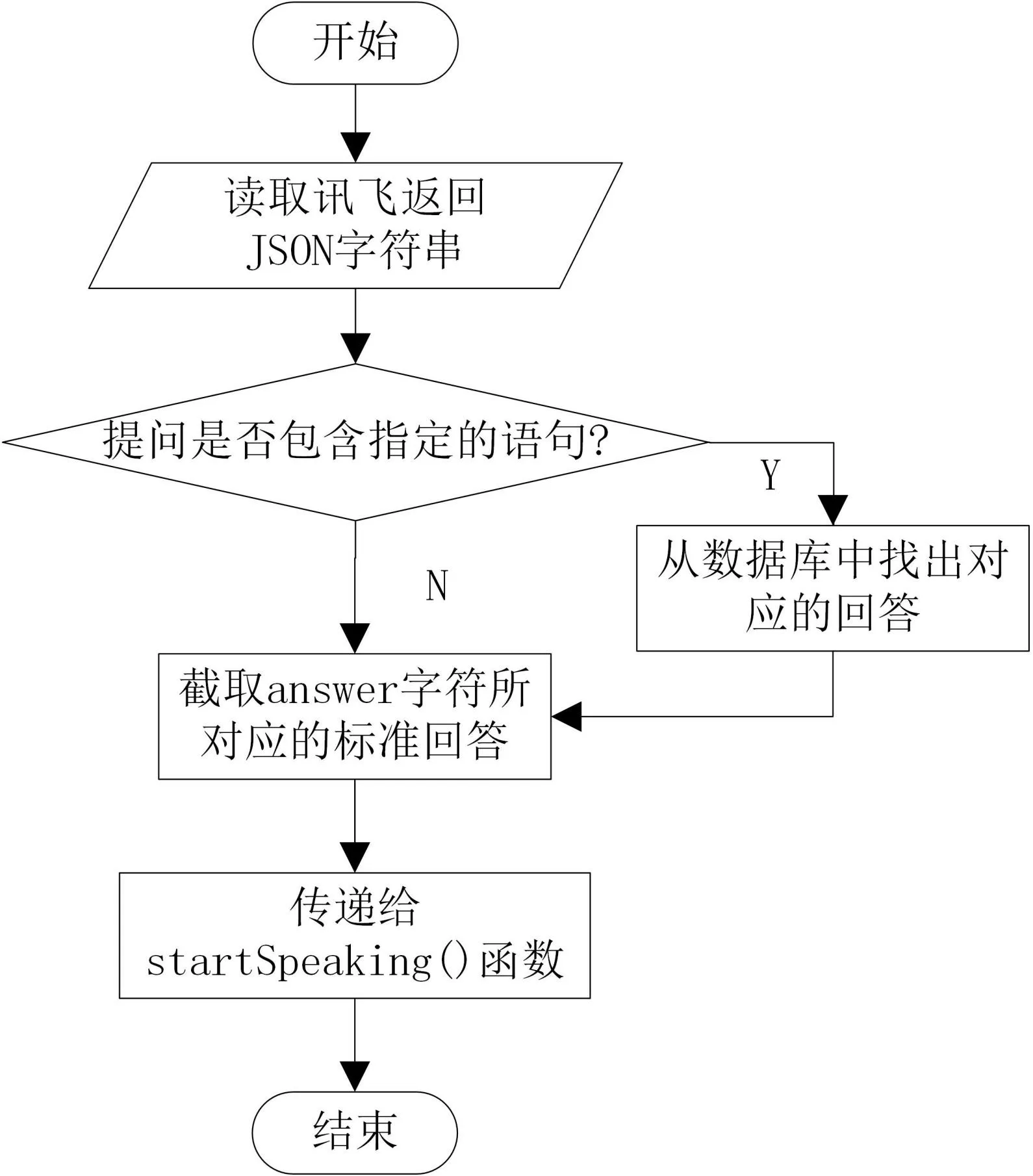
圖3 人機交互流程圖
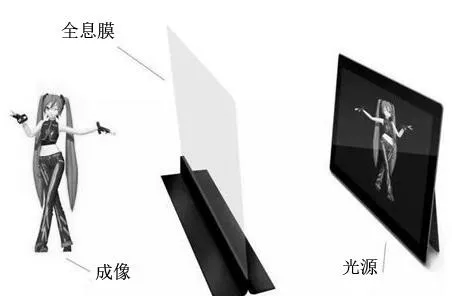
圖4 投影原理圖
2.2 樹莓派B
本文中將樹莓派B 設置為“指定跟隨”功能的實現平臺,針對樹莓派B 所提供的相關軟硬件條件對該功能進行修改,使其適配到樹莓派B 上。
2.2.1 硬件方面
圖5 為硬件結構框圖。
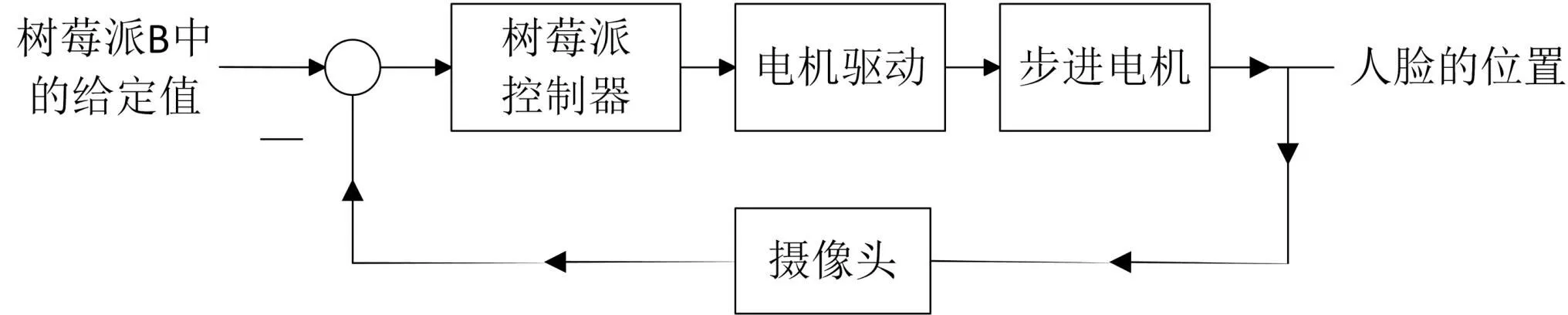
圖5 硬件結構框圖
“指定跟隨”功能使用樹莓派3 開發板作為基礎硬件平臺,內部安裝的是Linux 系統。給定值由樹莓派進行程序給定。為了能讓人臉對著攝像頭,因此將圖像的x 坐標(橫坐標)的中心值作為給定值。考慮到在實際中容易出現震動情況,因此給定值設置一個死區范圍[7-8]。
Risym 攝像頭擴展模塊通過插線與樹莓派B 連接,使用樹莓派B 的庫函數來調動攝像頭工作,其采集到的圖像作為反饋信號反饋給樹莓派B 控制器。樹莓派B 處理后將相關的信號從相對應的輸出I/O 口傳輸到異步電機配套的驅動器,帶動異步電機旋轉至合適位置后停止。
2.2.2 軟件方面
借助圖像識別的技術,通過在樹莓派B 上安裝的攝像頭采集使用者的面部信息,并利用OpenCV 所集成好的人臉識別算法對圖像中的人臉進行分析。利用相關的像素矩陣將圖像轉化為一維向量,再利用detectAndDisplay(frame)和detecMultiScale(...)指令對圖像中的人臉進行識別,實現對使用者的特定追蹤,并獲得人臉在圖像中的區域范圍[7]。通過OPENCV 庫、樹莓派硬件控制庫WiringPi.h 來控制樹莓派的引腳,輸出相應的調節信號控制電機的正反轉和輸出脈沖波的頻率,從而在驅動的協助下實現異步電機的旋轉,改變機器自身的狀態(角度)并結合反饋閉環、誤差分析處理等方式,保證一直正面面對使用者,實現“指定跟隨”功能在樹莓派B 上的應用。圖6 為“指定跟隨”工作流程圖。
通過上述方法即可將“指定跟隨”功能整合在以Linux 平臺為基礎的樹莓派B 上。
2.3 樹莓派A 和樹莓派B 之間的通訊
在整體架構中,每個部分之間應當存在通信關系。針對樹莓派A 的安卓系統和樹莓派B 的Linux 系統,本文中采用Socket 通信借助TCP/IP 協議實現Android(客戶端)與Linux(服務器端)在同一局域網下進行數據通信,并實現相關功能的控制。通過上述方法可將樹莓派A 和樹莓派B通過局域網聯系在一起,相互通訊。實現不同系統之間相互協調,從而構成整體。
3 結果
根據上文所述的設計方案,對實驗產品的各項功能進行測試、分析后得出以下結果。
3.1 樹莓派A
在樹莓派A 上搭載安卓系統,實現“人機交互”和“虛擬成像”功能的整合。對于各功能測試結果如下。
3.1.1 人機交互部分
人機交互部主要進程由語音輸入,語音識別,語義理解、發送、接收,語音合成,語音輸出組成。而檢測部分由語音效果監測程序代替。顯示界面的編寫在Android Studio 中的AndroidManifest 中完成,且需要針全息投影的特點編寫。圖7 為人機交互界面截圖。
3.1.2 虛擬成像部分
在AndroidStudio 中使用JAVA 語言對源程序進行Vedioview 功能的編寫。使用myVideoView = (VideoView)findViewById(R.id.videoView); final String videoPath =Uri.parse("android.resource://" + getPackageName() + "/"+R.raw.y_x264).toString();來調用在MikuMikuDance 中制作的動畫。使用setOnPreparedListener((mp))進行監聽,使用mp.setLooping(true)實現循環播放。圖8 為動畫截圖,圖9 為虛擬成像原理測試機實物照片。
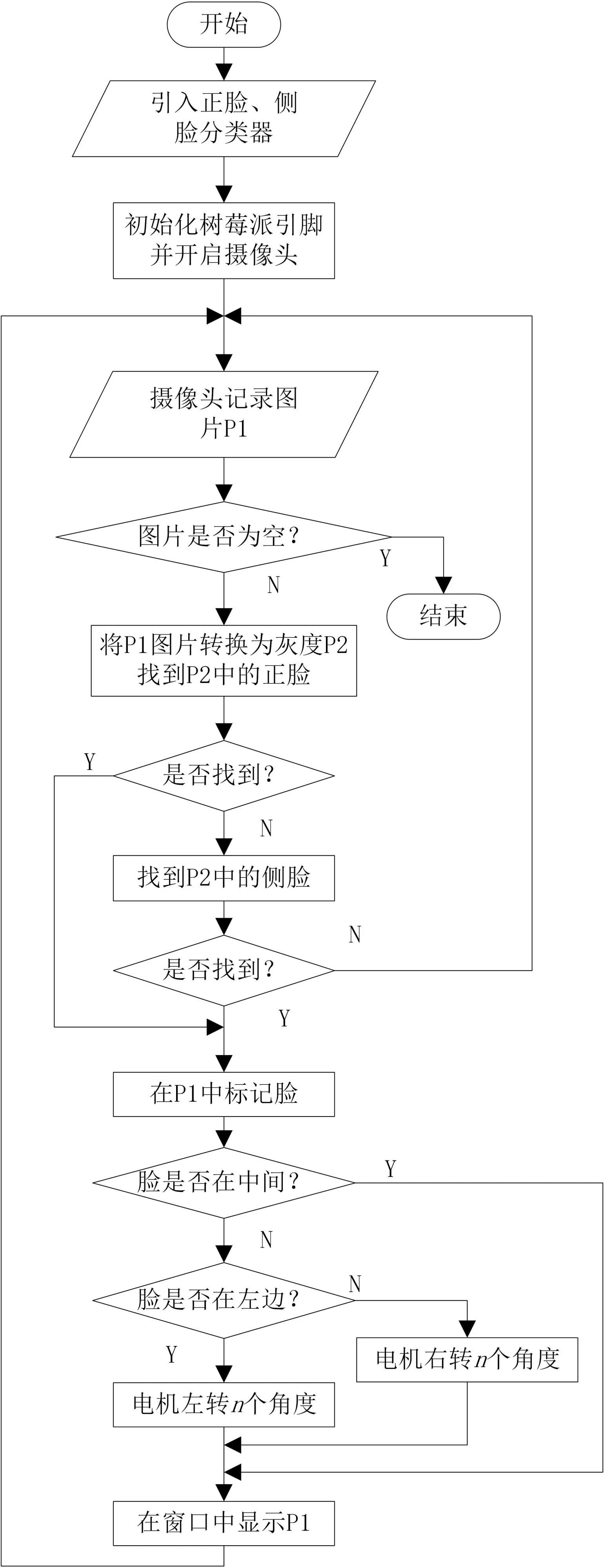
圖6 “指定跟隨”工作流程圖

圖7 人機交互界面截圖
圖8 “虛擬成像”動畫截圖

圖9 “虛擬成像”原理機實物照片
3.1.3 分析
樹莓派A 成功地實現了將“人機交互”和“虛擬成像”功能相結合,完成了同一系統條件下不同功能相整合的目的。
3.2 樹莓派B
樹莓派B 上搭載安卓系統,實現“指定跟隨”功能。對于該功能測試結果如下:使用O P E N C V 官方給出的haarcascade_frontalface_alt.xml 與haarcascade_profileface_alt.xml 的聯級分類器,使得識別方式很簡單。使用detectAndDsiplay ( ) 函 數 來 查 找 并 顯 示 人 臉 。detectAndDsiplay 函數中,使用detectMultiScale()函數來查找正臉與側臉。圖10 為“指定跟隨”功能識別特定使用者正臉和側臉的截圖。將“指定跟隨”整合到樹莓派B 上,再結合步進電機及其驅動,可以在一定誤差范圍和一定速度內完成對使用者的跟蹤。
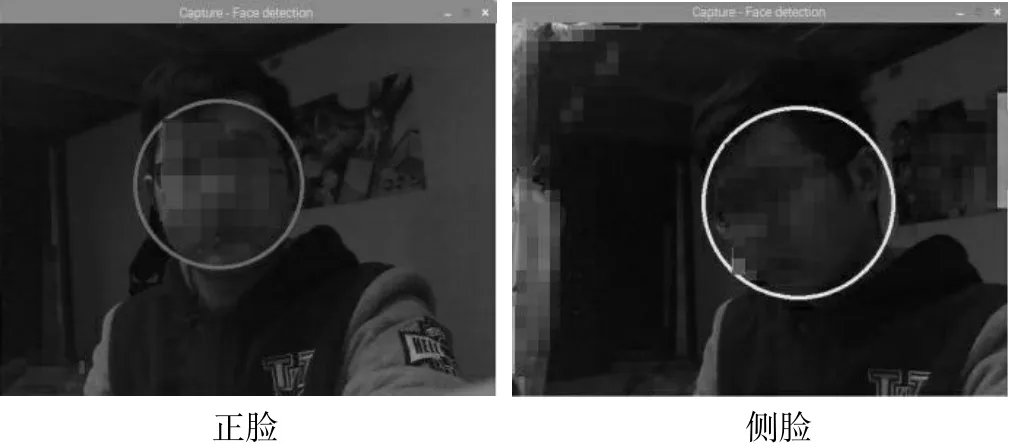
圖10 “指定跟隨”識別人臉截圖
3.3 樹莓派A 和樹莓派B 的通訊
圖11 為樹莓派A 和樹莓派B 的通訊截圖。
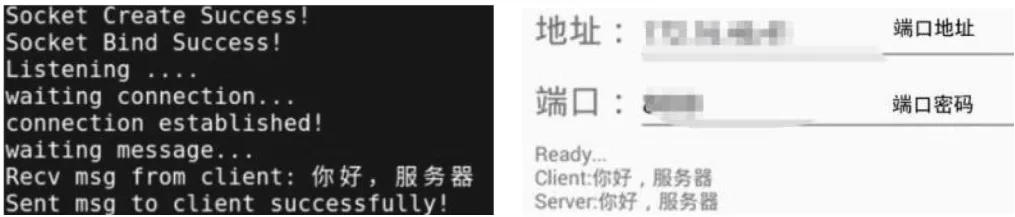
圖11 樹莓派A 和樹莓派B 的通訊截圖
利用Socket 可以實現安卓和Linux 在同一個局域網下相互通訊,從而將樹莓派A 和樹莓派B 通過無線的方式聯系起來,從外圍將兩部分整合為一體。
通過對三大功能在樹莓派平臺上的測試,結合樹莓派A和樹莓派B 之間通訊的嘗試,證明了通過本文中描述的方法可以解決2 個或者多個系統同時運作條件下,不同系統之間工作的分散性和統一性的合理配置問題。同時,通過對各項功能的調整整合,可以實現多個功能合理結合在同一個系統環境中,并構成統一的整體。
4 結束語
本項目的靈感來自于互聯網+浪潮的推動,針對普通陪伴機器人功能較單一,多功能機器人功能整合復雜困難的特點,設計了一種整合方式,達到方便、簡單、低成本的要求。本文重點針對“語音交互”“指定跟隨”“全偽息成像”這三個功能進行整合,并結合實際制作過程中的關鍵點進行分析,形成了一個具體的整體系統。該系統在實現三大功能結合的同時,也針對功能的統一性和獨立性進行了諸多調整,有著普遍性和特殊性。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
