帶時變計算時間和計算誤差的倒立擺視覺H∞控制研究
2019-04-12 07:03:28杜大軍占國華李汪佩費敏銳周文舉
自動化學報 2019年2期
關鍵詞:實驗
杜大軍 占國華 李汪佩 費敏銳 周文舉
倒立擺作為一個支點在下、重心在上的絕對不穩定被控對象,其具有非線性、不穩定等特性[1],能夠反映控制理論與工程中很多核心問題,例如魯棒性、跟蹤等,作為理想的實驗平臺驗證的理論方法可推廣應用到機器人直立行走的平衡控制、火箭發射中的垂直控制、海上鉆井平臺的穩定控制等[2?4],故倒立擺的穩定控制一直以來都是控制領域研究中的開放性問題[5?7].
傳統倒立擺穩定控制大都基于編碼器進行狀態信息測量然后進行控制器設計和穩定性分析[[8?11].然而,隨著視覺傳感技術的跨越式發展并且感知信息更加豐富全面、直觀,甚至能夠應用到復雜危險的工業控制現場[12?13],故其正在大量地被應用到工業自動化檢測[14]、機器人控制[15?16]等領域.然而,在實時控制系統中,與非視覺傳感測量相比,為了獲得狀態檢測信息,必須對視覺傳感測量的圖像進行處理,這將不可避免地帶來圖像處理計算時間和計算誤差,從而影響控制系統性能甚至造成控制系統失穩[17].因此,國內外學者開始構建基于視覺傳感的倒立擺控制系統實驗平臺進行理論方法驗證,為工業視覺伺服實時控制提供理論基礎和技術支撐.
在倒立擺視覺伺服控制中,因為倒立擺屬于快變的運動控制系統,采樣周期非常小,故從擺體圖像采集到經過圖像處理計算出小車位移和擺桿偏角耗費的計算時間對控制系統性能及其穩定性影響至關重要.根據是否考慮圖像處理計算時間將目前倒立擺視覺伺服控制研究分為兩類:第一類不考慮圖像處理計算時間的倒立擺視覺伺服控制.例如文獻[18]采用視覺傳感僅測量直線一級倒立擺的擺桿偏角,并設計模糊邏輯控制器實現倒立擺的穩定控制.文獻[19]選取高幀率(580fps)低像素的工業相機測量旋轉式倒立擺的擺桿偏角實現穩定控制.以上研究采用視覺傳感僅測量了倒立擺的部分狀態信息,然而當全部狀態信息采用視覺傳感進行采集并進行處理時,產生的計算時間將嚴重影響控制系統性能甚至造成系統失穩,為此國內外學者已開始考慮計算時間研究倒立擺視覺伺服控制.第二類考慮圖像處理計算時間的倒立擺視覺伺服控制.例如文獻[20]對直線一級倒立擺視覺圖像計算小車位移和擺桿偏角時,計算時間高達60ms,為此采用Smith預估算法進行時延補償并實現了穩定控制.文獻[21]將對直線一級倒立擺視覺圖像處理產生的計算時間當作定時滯處理實現了穩定控制.以上初步研究了圖像處理計算時間對倒立擺穩定控制影響,但是它直接影響采樣策略與系統性能,故不能簡單地將其看作普通時延,亟需對視覺傳感采樣策略、計算時間特性及系統性能開展深入研究.
另外,在倒立擺實時控制實驗過程中進一步發現,由于背景、光照及實驗環境等導致視覺傳感采集的圖像帶有噪聲,使得在計算小車位移和擺桿偏角過程中不可避免地產生計算誤差,這對倒立擺控制系統性能也具有較大影響.然而目前關于視覺伺服控制系統研究成果中鮮有考慮圖像處理計算誤差,因此深入分析圖像處理計算誤差特性及其對系統穩定性能的影響非常重要.
本文聚焦于倒立擺視覺穩定控制中圖像處理帶來的時變計算時間和計算誤差影響控制系統性能甚至穩定性問題,深入開展倒立擺視覺穩定控制研究,主要貢獻包括:1)創新設計了新型的倒立擺視覺伺服控制實驗平臺,設計了一種基于事件觸發機制的工業圖像采集策略,提出了考慮小車和擺桿特征的小車位移和擺桿偏角計算方法,并統計分析了圖像處理計算時間和計算誤差特性;2)建立了融合計算時間和計算誤差的閉環控制系統模型,理論證明系統的穩定性并建立了反映計算時間與系統穩定性能之間關系,給出了系統對計算誤差的H∞擾動抑制水平γ和H∞控制器設計方法.
1 倒立擺視覺伺服控制實驗平臺
為了分析圖像處理計算時間和計算誤差對控制系統性能的影響,以倒立擺運動控制實驗裝置為基礎,采用視覺傳感代替傳統編碼器,創新設計了一種新型的倒立擺視覺伺服控制實驗平臺,結構如圖1所示.在實驗平臺中,工業相機首先采集倒立擺實時運動圖像,然后傳送到圖像處理和控制單元,經過圖像處理計算得到擺桿偏角和小車位移的狀態信息,接著通過控制算法求出控制信號并發送到運動控制卡,實現控制信號到控制脈沖量的轉換,最后由伺服驅動器帶動伺服電機轉動控制小車運動,實現倒立擺視覺實時反饋控制.
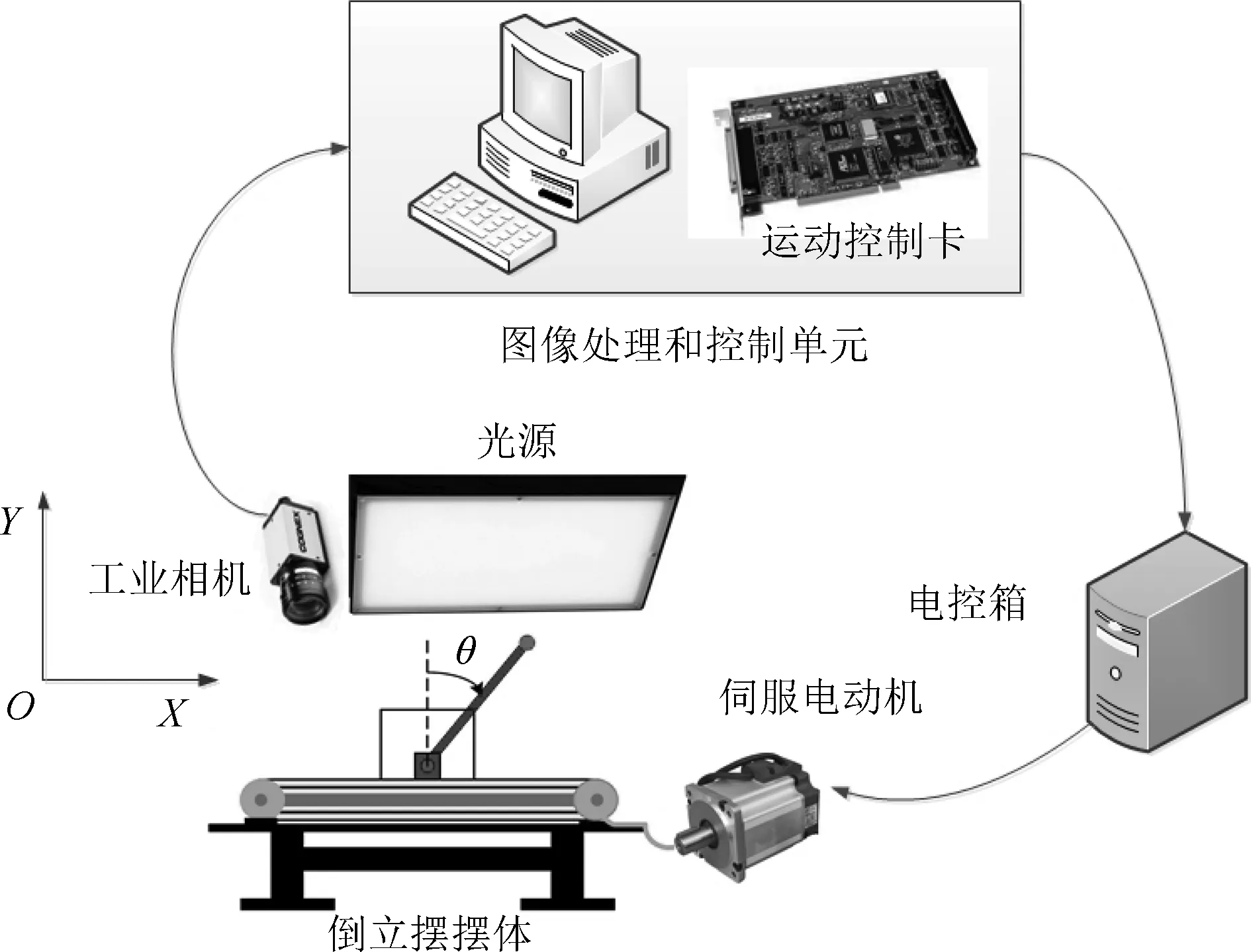
圖1 倒立擺視覺伺服控制實驗平臺結構Fig.1 Scheme of inverted pendulum visual servoing control platform
圖1中的實驗平臺主要包括以下幾個部分:
1)擺體.選取直線一級倒立擺作為被控對象,由基座、小車、擺桿、滑軌、同步帶、交流伺服電機、伺服驅動器、光電編碼器和限位開關組成.軌道長度0.6m,鋁制擺桿長0.5m,擺桿通過聯軸器鉸鏈在小車上,并且擺桿可自由旋轉.
2)視覺傳感檢測裝置.主要包括工業相機和光源,工業相機采用Aca640-120gm 型單色相機,幀率可以自由調節,最大幀率為120fps,圖像采集最大分辨率為659×492像素.光源自主設計采用5根縱向排列的LED日照燈管,架設在擺體正上方,光源與擺體之間高度可以自由調節,同時可以根據實際需求自由調節光照強度.
3)圖像處理和控制單元.為了處理視覺傳感器采集的圖像,基于一臺帶有操作系統Windows XP的PC機,采用Microsoft Visual Studio 2010結合OpenCV2.4.11機器視覺庫研發了一套倒立擺圖像處理軟件,能運用多種算法處理倒立擺圖像,計算擺桿偏角和小車位移,然后根據控制算法計算控制信號,并發送到安裝在PCI插槽中的GT-400-SV-PCI型運動控制卡,通過其輸出相應的控制脈沖量.
4)執行器.主要包括交流伺服電機驅動器和伺服電機,運動控制卡下發給伺服電機的控制信號,通過伺服電機驅動器驅動伺服電機,然后通過皮帶帶動小車在軌道上來回運動.
在以上建立的倒立擺視覺伺服控制系統實驗平臺中,擺桿偏角和小車位移狀態信息的測量是實現系統穩定控制的前提與基礎.然而,當視覺傳感取代編碼器后,無法通過圖像直接讀取小車位移和擺桿偏角,必須先對擺體圖像進行處理與定位,然后計算小車位移和擺桿偏角,但是在該過程中不可避免地產生計算時間和計算誤差兩個關鍵問題.
1)計算時間.由于倒立擺屬于快變的運動控制對象,文獻[2]采用編碼器進行狀態信息采集并設置采樣周期為T=10ms.然而,當采用視覺傳感進行狀態信息采集時,通常僅相機曝光時間就需要10ms左右,并且由于擺體圖像像素點多,計算小車位移和擺桿偏角還需一定的圖像處理計算時間,故總的計算時間要遠大于10ms,這不但影響控制周期的選擇而且極大影響控制系統性能甚至導致控制系統失穩.
2)計算誤差.主要來自兩方面因素:一方面倒立擺的圖像受實驗環境例如光照、背景等干擾影響;另一方面工業相機視覺視野必須包含小車和擺桿運動整個區域,離擺體的距離要遠大于文獻[19]中對應的距離,本文中相機成像平面與倒立擺平面距離約為1m,然而,由于相機較小,倒立擺較大,使得相機平面與倒立擺平面完全平行比較困難,不平行也不可避免地產生誤差.然而,由于采樣周期短,較小誤差就會導致較大的小車速度誤差和擺桿角速度誤差,進而導致施加在小車上控制力誤差大幅度增大,從而使得擺桿偏角和小車位移出現大幅度振蕩甚至導致不穩定.例如當小車特征點的像素位移誤差為2pixels時,通過計算施加在小車上的對應控制輸入誤差放大為5.84m/s2.
為了解決以上兩個關鍵問題,接下來首先設計基于事件觸發的圖像采集策略,然后考慮倒立擺的擺桿與小車特征,進行小車位移和擺桿偏角與圖像像素之間的定量關系計算,并分析計算時間與計算誤差的統計特性.
2 視覺傳感測量
2.1 圖像采集
在建立的倒立擺視覺伺服控制實驗平臺中,相機架設在擺體正前方,并且保持相機所在平面水平及光軸垂直于擺桿自由旋轉的垂直面.相機幀率設為100fps,即每幀圖像曝光時間為10ms;為了實時連續采集擺體運動圖像并降低總計算時間,相機采用事件觸發機制進行圖像采集,即當一幀圖像通過處理計算完小車位移和擺桿偏角后,立即向工業相機發送采集下一幀圖像的指令,如圖2所示.
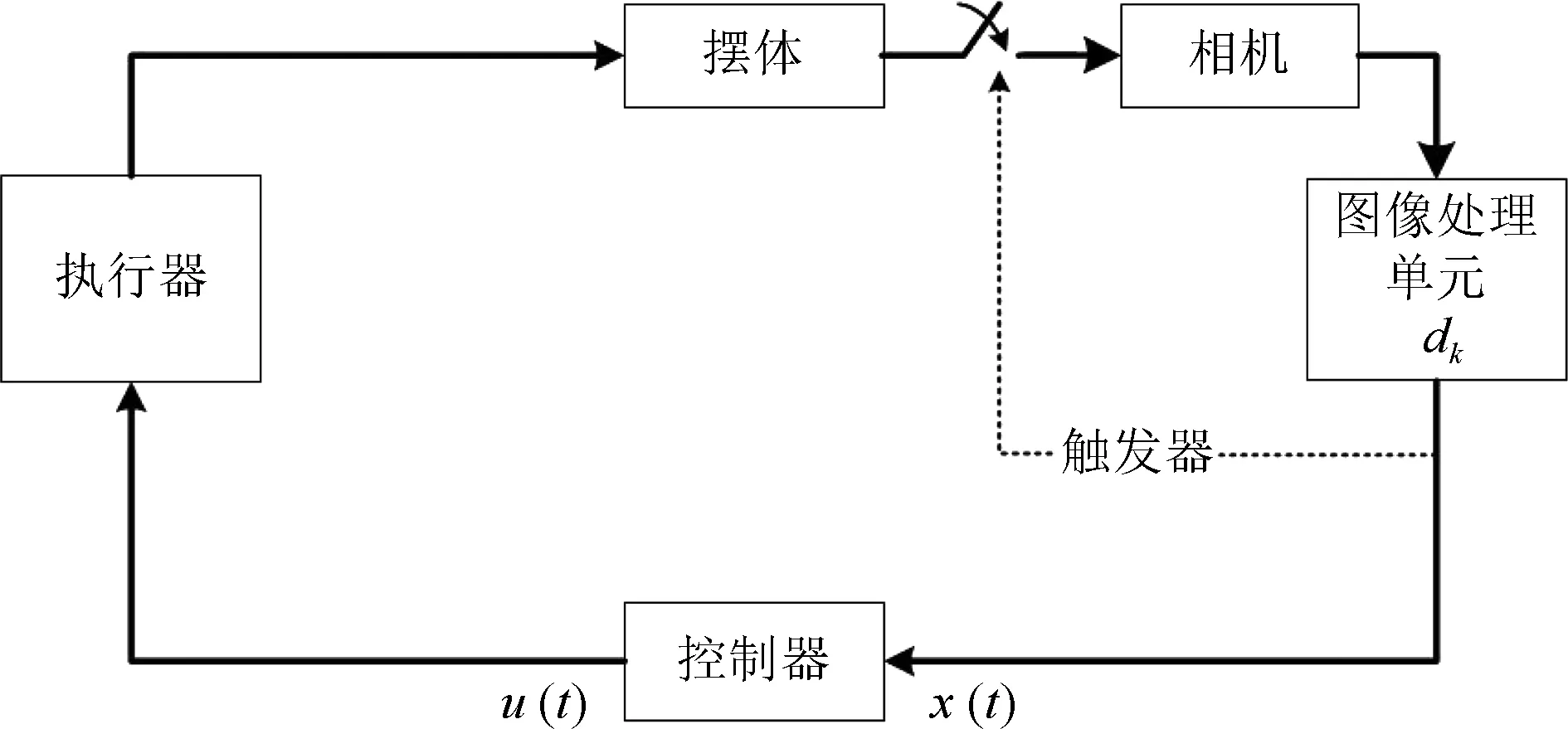
圖2 倒立擺視覺伺服控制系統控制框圖Fig.2 Control block diagram of inverted pendulum visual servoing control system
注1.在實際實驗中設置相機幀率為100fps,圖像的曝光時間均設為10ms,能夠使圖像具有一定的曝光度以保證圖像質量,同時曝光時間也不太長,否則會增加總計算時間.工業相機采用事件觸發機制,使得相機能夠采集盡可能多的圖像,從而使控制器能夠運用最多的狀態信息以提高控制系統性能.然而,由于每次總計算時間的隨機性,使得每次采樣間隔并不相同,故實際每秒處理圖像30~50幀.
2.2 小車位移和擺桿偏角計算
在工業相機設置好后,不同于傳統的光電編碼器可以直接獲取狀態信息,相機采集的擺體圖像需要通過圖像處理提取出目標特征點信息后,才能快速計算小車位移和擺桿偏角.針對擺體圖像,小車位移和擺桿偏角計算過程如圖3所示,主要包括圖像預處理(S1:局部定位;S2:邊緣檢測)和狀態信息計算(S3:小車位移和擺桿偏角計算).
1)圖像預處理.工業相機采集的擺體圖像背景為灰白墻體背景,如圖4(a)所示,從中可以直觀地看到圖像信息冗余度較大,為了降低數據量,加快圖像處理速度,節省計算時間,需在原圖像中分別定位小車和擺桿的運動區域.因為相機和倒立擺之間的距離固定,故運動擺體通過相機透視投影后的圖像具有相對固定的分辨率,因此采用行掃描從圖像中提取出小車和擺桿的運動區域,如圖4(b)和圖4(c)所示.然后,采用Canny邊緣檢測算法[22?23]檢測小車和擺桿的邊緣信息,如圖5(a)和圖5(b)所示,在此基礎上計算小車位移和擺桿偏角.
2)小車位移計算.擺體圖像通過圖像預處理(S1,S2)后獲得的小車位移以像素為單位,而實際實驗平臺控制參數是以物理位移為單位,故需要進行單位轉換,這通過相機透視投影模型實現[19,22],如圖6所示.圖6包含4個坐標系,即世界坐標系(Ow:XwYwZw)、相機坐標系(Oc:XcYcZc)、像素坐標系(O0:uv)和成像平面坐標系(O1:xy),其中Oc表示相機光心,Zc表示相機光軸,并且Zc是垂直像素坐標系于主點O1(u0,v0),OcO1表示相機焦距,即f=OcO1,OcOw表示相機光心到擺桿自由旋轉垂直面之間距離,即d=OcOw.
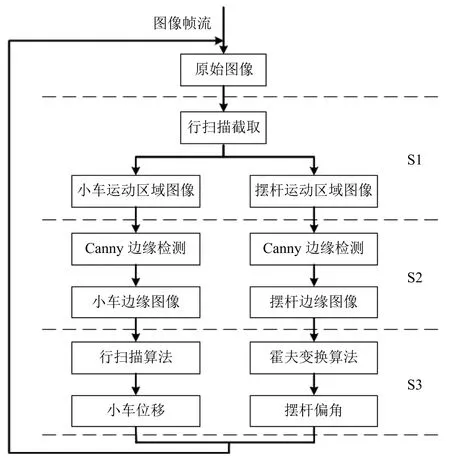
圖3 視覺傳感測量過程Fig.3 Process of vision sensing measurement
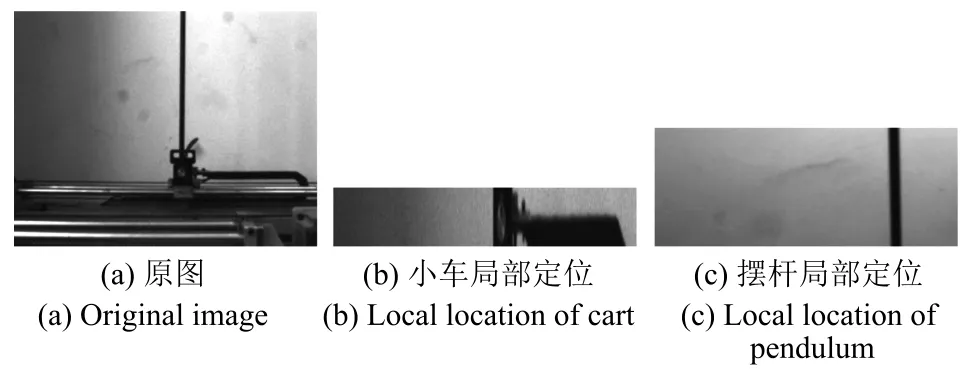
圖4 小車和擺桿局部定位Fig.4 Local location of cart and pendulum
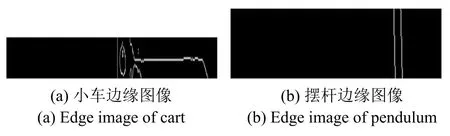
圖5 小車和擺桿邊緣信息Fig.5 Edge information of cart and pendulum
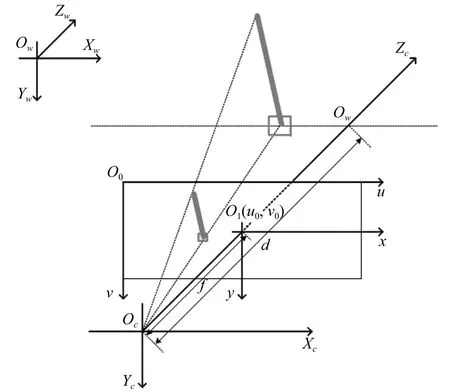
圖6 相機透視投影模型Fig.6 The camera perspective projection model
為了得到目標特征點的物理量,世界坐標系和像素坐標系之間的轉換關系為

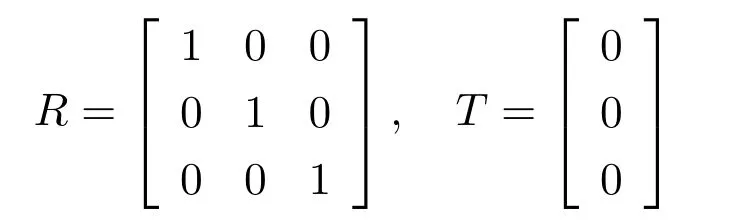
其中,P=[u v1]T和Pw=[XwYwZw1]T分別是目標特征點在像素坐標系中的二維齊次坐標和世界坐標系中的三維齊次坐標,λ是一個標量因子,相機外部參數T∈R3和單位正交矩陣R∈R3×3分別表示像素坐標系和世界坐標系之間的平移量和旋轉量.由于倒立擺平臺和工業相機均固定不動,故世界坐標系和相機坐標系始終重合一致,則相機外部參數為
相機內部參數矩陣K∈R3×3采用相機標定[24]確定,即
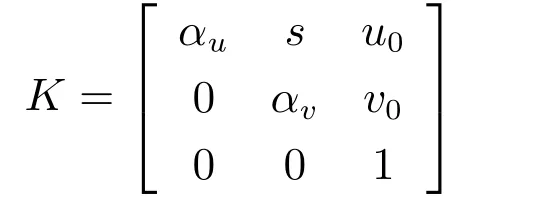
其中,αu=f/dx,αv=f/dy.dx和dy分別為每個像素在成像平面坐標系的x軸和y軸方向上的物理距離.s為因成像平面坐標系的坐標軸不互相正交而導致的傾斜因子,不失一般性,設s=0.
由于世界坐標系和相機坐標系之間沒有發生旋轉和平移,故標量λ的大小就是目標特征點在世界坐標系中的坐標Zw,也是相機光心到擺桿自由旋轉的垂直面之間距離d,即λ=d.通過標定可得相機內部參數,如表1所示.

表1 相機內部參數Table 1 Intrinsic parameters of camera
通過式(1)可得

由式(2)可知,在獲得目標特征點在像素坐標系中的水平坐標值u后,可計算出目標特征點在世界坐標系中的水平坐標值Xw,即得到小車位移.因此,為了計算小車在像素坐標系中的位移,首先在圖5(a)的小車邊緣圖像中采用行掃描算法[18,21],快速地找出小車的垂直邊緣(列坐標),然后根據先驗知識定義n個不同的像素行vi(i=1,···,n),如圖7所示.接著,采用逐行掃描可得到對應小車邊緣的像素列索引ui(i=1,···,n),最后將其平均值作為小車的實際像素位移,即


圖7 行掃描檢測小車位移Fig.7 Cart position is determined using line scan algorithm
注2.針對以上像素行數n的取值要大于1,使得通過式(3)取均值可降低檢測誤差,但是n取值也不能過大,否則將大大增加圖像處理花費的計算時間而導致實時性差.根據實際實驗,本文中取n=3.
3)擺桿偏角計算.由于角度的大小在映射過程中始終保持不變,故擺桿在世界坐標系中的偏角與其在像素坐標系中的偏角相同.二值圖像中的直線通常可用霍夫變換(Hough transform)方法[25]檢測并計算傾斜弧度.例如對圖5(b),采用霍夫變換從擺桿邊緣圖像中檢測擺桿偏角,結果如圖8所示.在實際實驗中,通常霍夫變換檢測出來滿足條件的直線不止一條,故計算所有滿足條件的直線傾斜弧度,并將平均值作為擺桿偏角.
圖8 霍夫變換檢測擺桿偏角Fig.8 Pendulum angle is determined using Hough transform
2.3 計算時間和計算誤差統計分析
1)計算時間統計分析.在圖像采集、小車和擺桿圖像處理定位及狀態信息計算過程中都需要耗費時間,導致小車位移和擺桿偏角狀態信息相對相機采樣時刻嚴重滯后.此外,由于光照、背景變化以及擺桿運動變化等因素影響圖像質量使得每一幀圖像的處理計算時間不盡相同,具有一定的時變性,因此將圖像處理計算時間視為定時滯研究具有一定缺陷,需要進一步研究計算時間特性對倒立擺性能的具體影響.為了分析圖像處理計算時間的特性,采集了2000幀倒立擺運動圖像,然后通過上述圖像處理算法計算小車位移和擺桿偏角,同時記錄每幀圖像處理耗費的計算時間,如圖9所示.通過統計分析,發現計算時間變化范圍為[0.019,0.029]s.若用,分別表示圖像處理計算時間的上下界,則

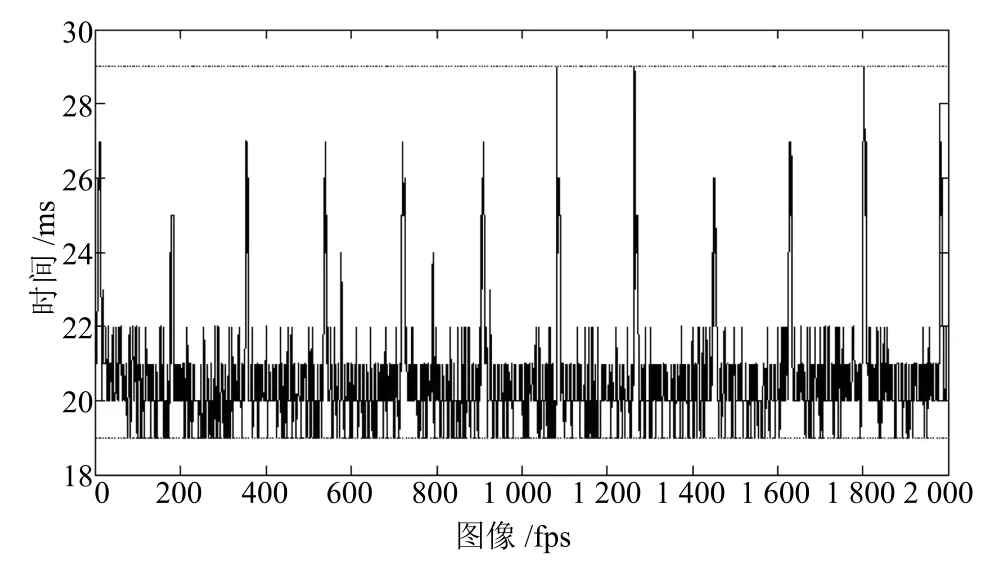
圖9 計算時間Fig.9 Computational time
2)計算誤差統計分析.在倒立擺實時控制實驗過程中,由于背景、光照及實驗環境等導致視覺傳感采集的圖像帶有噪聲,進而在計算小車位移和擺桿偏角過程中不可避免地產生計算誤差.然而,由于影響圖像質量難以用精確模型描述,故采用數學統計方法進行誤差分析.首先,通過實驗采集2000幀倒立擺實時運動圖像,同時將每幀圖像采集時刻的光電編碼器值作為基準值,在此運用同一個定時器,同時啟動光電編碼器和工業相機以保證工業相機和光電編碼器采樣時刻一致.接著,對每一幀圖像進行處理以計算小車位移和擺桿偏角,將其微分處理后得到小車速度信號和擺桿角速度信號,并與光電編碼器采集信息一一對比,小車位移、小車速度、擺桿偏角、擺桿角速度計算誤差分別如圖10~13所示.最后,從中可以發現小車位移和速度統計誤差分別是 [?0.0015,+0.0015]m,[?0.0015,+0.0015]m/s,擺桿偏角和角速度統計誤差分別是 [?0.007,+0.007]rad,[?0.35,+0.35]rad/s.若狀態量的圖像處理計算誤差用err(t)∈R4表示,則

其中,Bω=[0.0015 0.007 0.075 0.35]T,ω(t)∈[?1,+1]是隨機變量.

圖10 小車位移計算誤差統計Fig.10 Computational error statistics of cart position
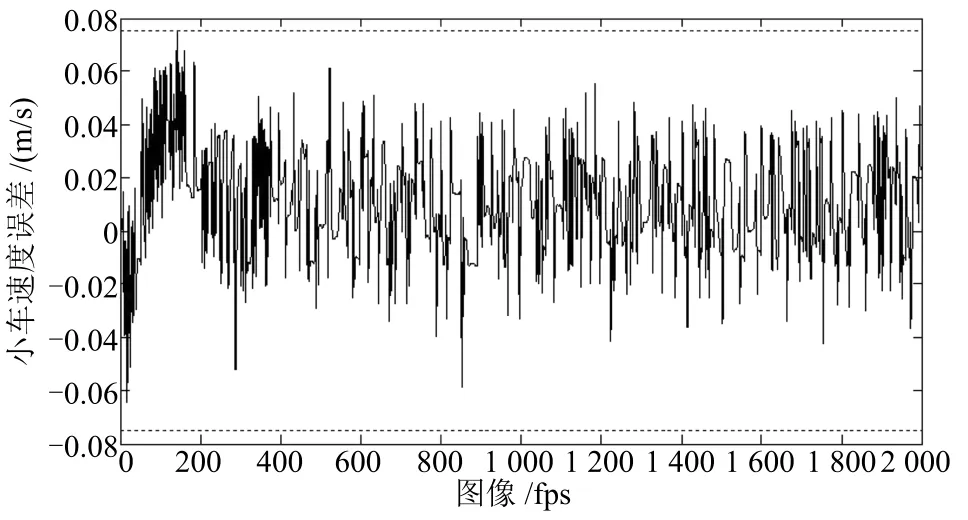
圖11 小車速度計算誤差統計Fig.11 Computational error statistics of cart velocity
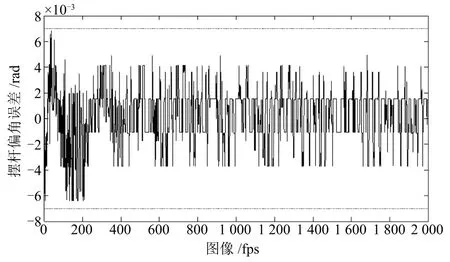
圖12 擺桿偏角計算誤差統計Fig.12 Computational error statistics of pendulum angle
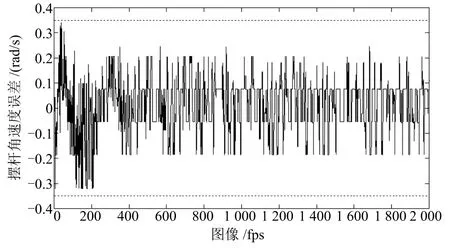
圖13 擺桿角速度誤差統計Fig.13 Computational error statistics of pendulum angular velocity
注3.統計分析表明,運用視覺傳感采集擺體運動圖像,然后通過圖像處理計算擺桿偏角和小車位移所耗費的計算時間具有時變特性且有上下界.同時,背景、光照及實驗環境等帶來的圖像處理計算誤差也是隨機且具有上下界,故可將計算誤差定義為外部有界干擾.
由于倒立擺穩定控制對實時性和精確度要求非常高,故接下來考慮時變圖像處理計算時間和計算誤差,建立視覺倒立擺系統模型并進行穩定性分析和控制器設計.
3 系統建模
考慮以上統計的圖像處理計算誤差(式(5)),根據牛頓運動學定理并在擺桿垂直向上的穩定范圍內(|θ|≤0.2rad)進行線性化,可建立倒立擺視覺伺服控制系統狀態空間方程,即

其中,x(t)∈R4是狀態量,且x1=α,x3=,x2=θ,x4=分別表示小車位移(m)、小車速度(m/s)、擺桿偏角(rad)、擺桿角速度(rad/s);u(t)表示控制輸入信號且為小車加速度;z(t)∈R2表示被調輸出;ω(t)∈L2[0,∞)是圖像處理計算誤差(式(5));A,B,C,D和Bω是已知常數矩陣,具體如下:
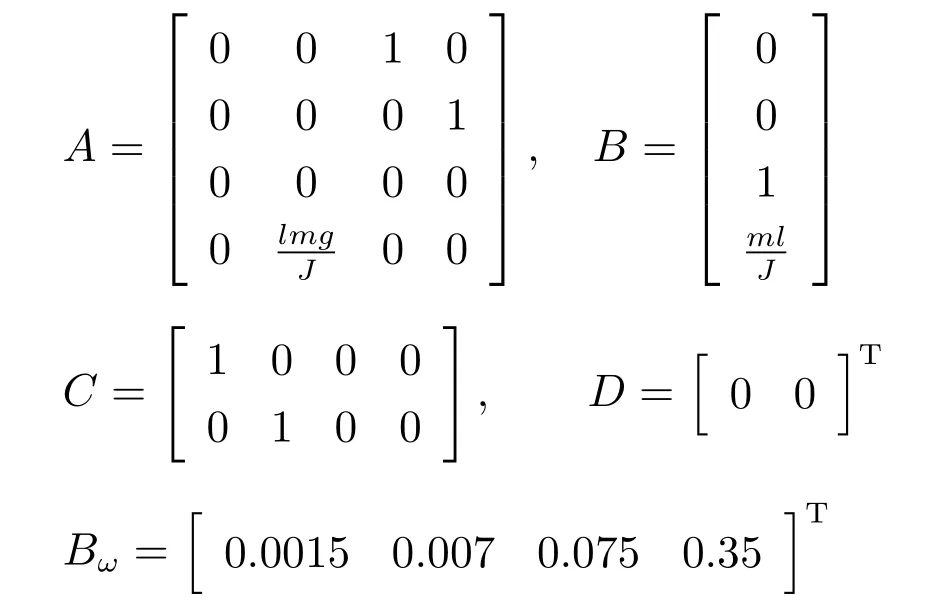
其中,l為擺桿轉動點到質心的長度,m為擺桿質量,J為擺桿基于轉動點的轉動慣量,g為重力加速度,α為小車位移,θ為擺桿與垂直方向的偏轉角度.
針對系統模型(6),設計無記憶的全狀態反饋控制器

由于相機采用事件觸發機制,當每一幀圖像通過處理計算完小車位移和擺桿偏角后才進行下一幀圖像的采集,如圖14所示,tk表示相機采集第k幀圖像時刻,dk表示第k幀圖像處理花費的計算時間,由式(4)可知其滿足

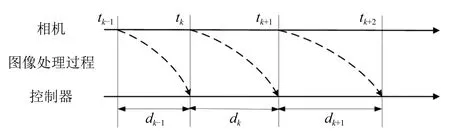
圖14 信號時序圖Fig.14 Signal timing diagram
從圖14可知,控制信號(7)可改寫為

因為相機采集圖像時刻tk與計算時間dk密切相關,為了建立tk與dk之間關系,令

其中,d(t)是具有上下界的時變時延,滿足
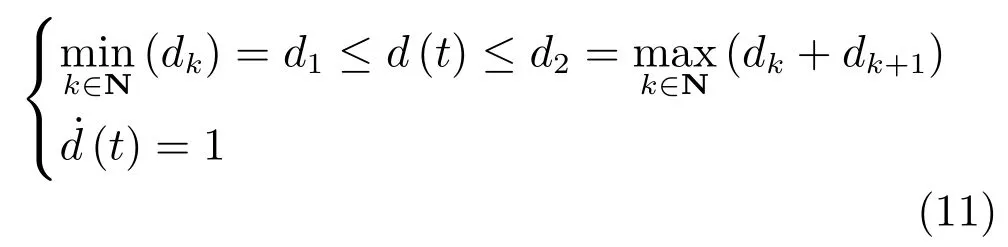
將式(9)和式(10)代入式(6),可得
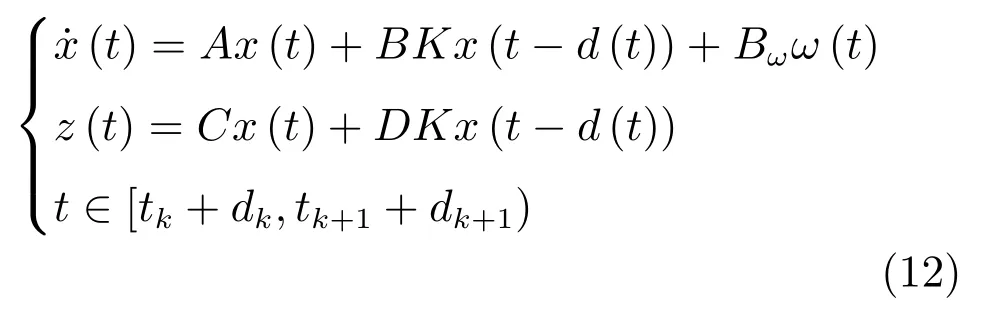
從式(12)可以發現,閉環系統是一個帶有時變時延和外部噪聲干擾的連續系統,對其穩定性分析可以描述成如下定義的H∞控制問題.
定義 1.H∞控制問題[26?28].對給定常數γ>0,如果系統(12)具有如下性質:
1)系統是漸近穩定的;
2)外部擾動ω(t)到被調輸出z(t)的傳遞函數Gωz(s)的H∞范數不超過給定的常數γ,即在零初始化條件x(t)=0(t∈[?d2,0])下,滿足‖z(t)‖≤γ‖ω(t)‖,?ω(t)∈L2[0,∞),則稱系統 (12)具有H∞性能γ,其中‖z(t)‖ ≤γ‖ω(t)‖反映了系統對外部擾動的抑制能力.
若不考慮圖像處理計算誤差,即ω(t)=0,由以上推理過程可知閉環系統(12)將退化為

注4.閉環控制系統(12)不僅考慮了時變計算時間特性,而且考慮了計算誤差,這不同于目前不考慮計算誤差且僅簡單考慮計算時間的研究工作[18?21],從而為深入分析計算時間和計算誤差與系統性能之間的定量關系奠定了基礎.此外,閉環系統(13)僅考慮時變計算時間特性,這也為后續對比分析計算誤差對系統性能影響奠定了基礎.
4 穩定性分析
首先給出以下三個引理.

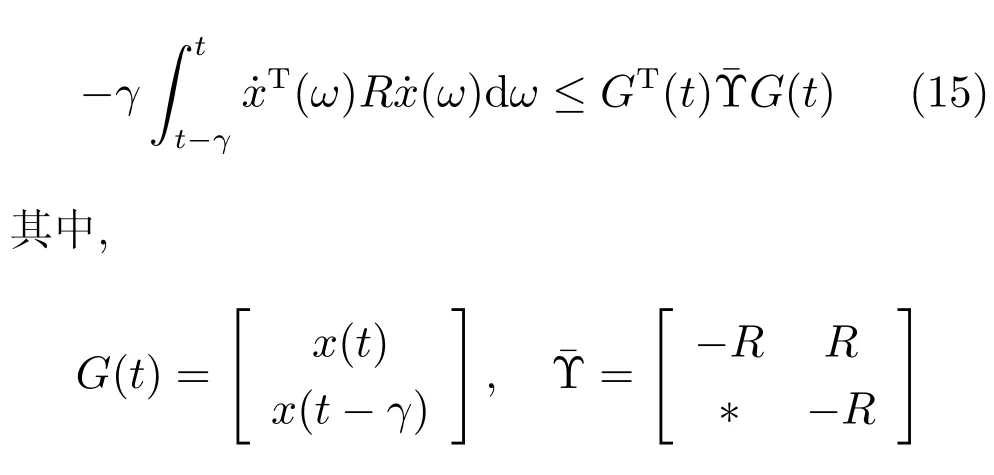
引理2[30].對于給定的實對稱矩陣R>0,R∈Rn×n,存在標量γ>0以及向量函數˙x:[?γ,0]→Rn,則以下不等式成立.
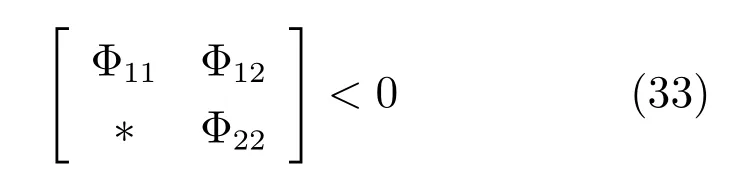
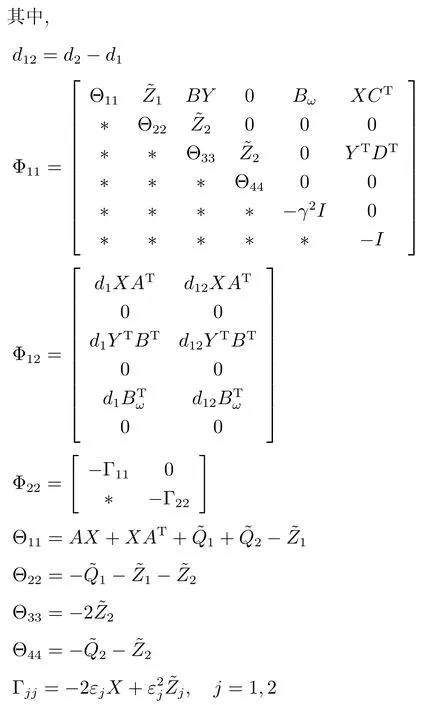
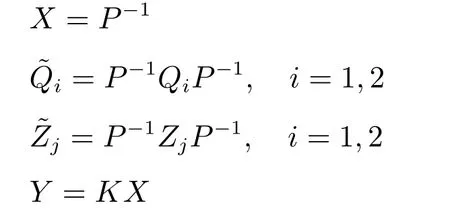
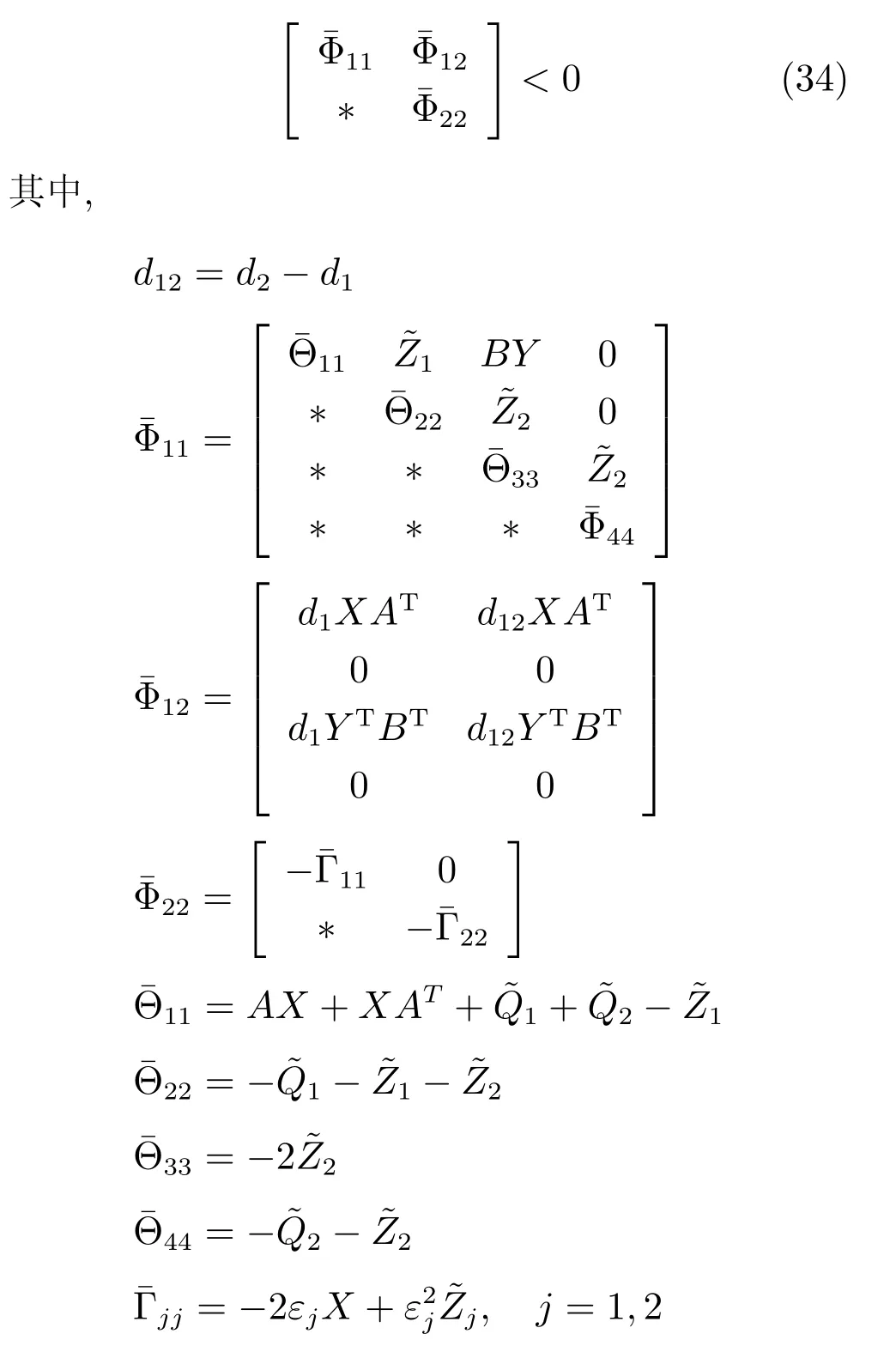
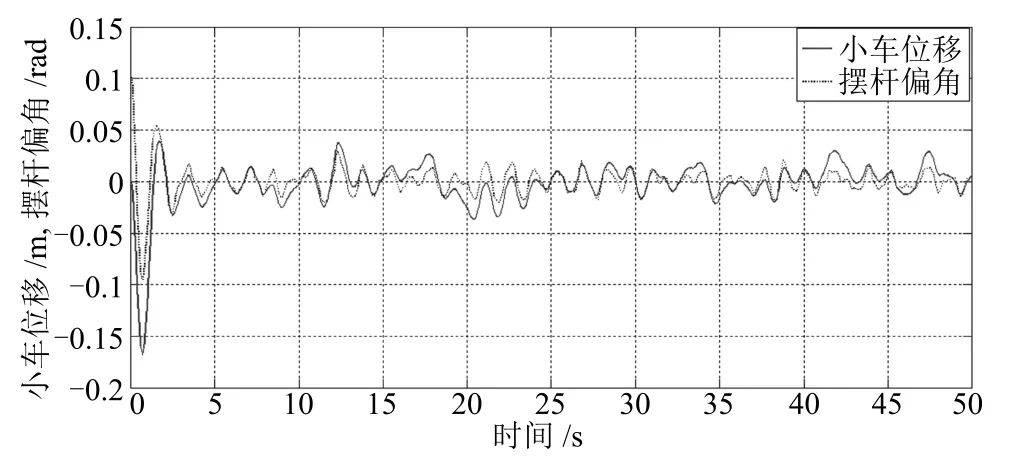
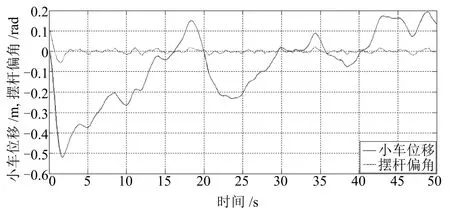
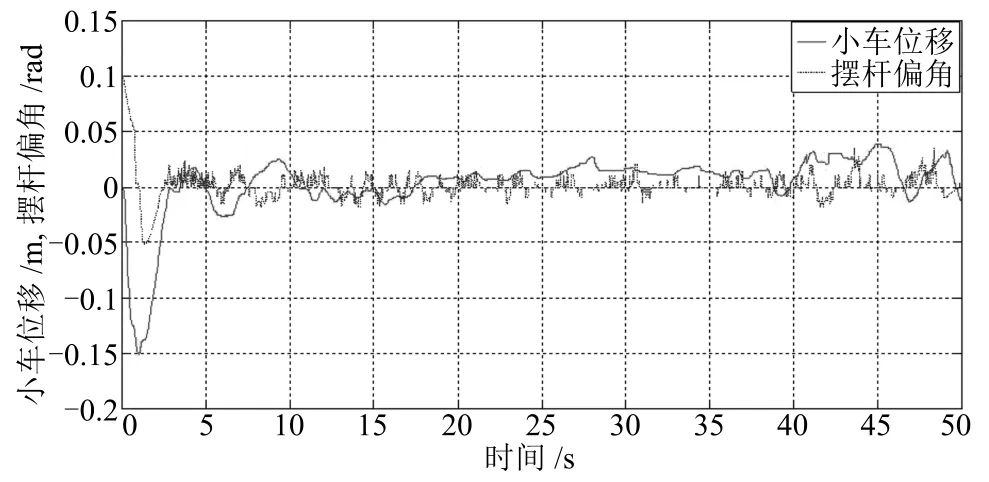
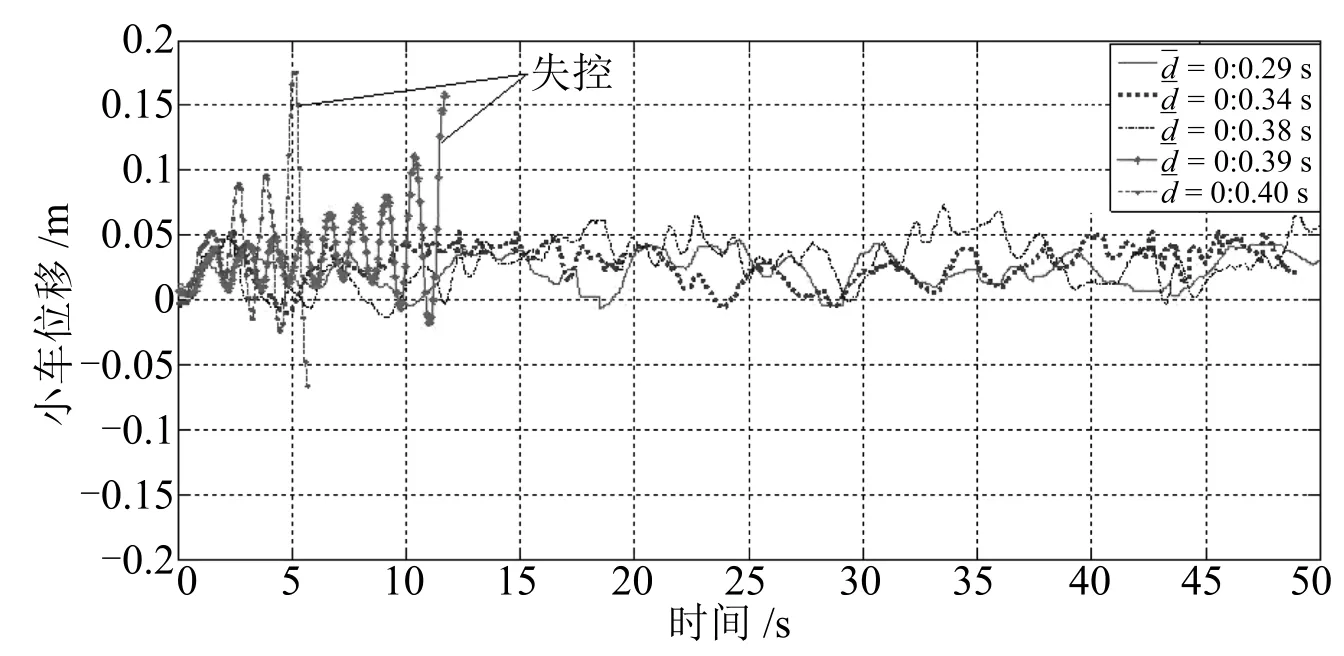
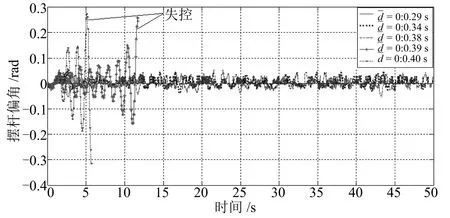
引理3[31].對于給定的實對稱矩陣R>0,R∈Rn×n,存在標量0 定理1.對于給定常數0 則閉環系統(12)對所有滿足式(11)的時延均漸近穩定,且在零初始條件下具有給定的H∞擾動抑制水平γ. 證明.構造如下Lyapunov泛函: 對V(x(t))關于時間t求導,可得 將式(19)~(21)相加,可得 應用引理2和引理3,可得 將式(23)~(25)代入式(22),可得V(x(t))的導數為 接下來從兩個方面證明定理1. 1)設ω(t)=0,?t≥0,則 2)在零初始條件x(t)=0(t∈[?d2,0])下,滿足‖z(t)‖≤γ ‖ω(t)‖,?ω(t)∈L2[0,∞),則 如果Π<0,則 上式兩邊對t從0~∞求積分,可得 在零初始條件下,V(x(t))|t=0=0,則 成立,即‖z(t)‖≤γ‖ω(t)‖成立.由引理1可知,矩陣不等式(17)成立,則Π<0成立. 推論1.對于給定常數0 則閉環系統(13)對所有滿足式(11)的時延均漸近穩定. 推論1的證明與定理1的證明過程類似,只需將定理1中涉及圖像處理誤差ω(t)項的行和列(即第5、6行,第5、6列)刪除即可,證明略. 注5.定理1證明了受時變時延和計算誤差影響的控制系統穩定性,建立了系統穩定性條件與時變時延之間的關系,給出了系統對計算誤差的抑制水平.推論1證明了受時變時延影響的控制系統穩定性,建立了系統穩定性條件與時變時延之間的關系. 定理1給出了系統穩定性及H∞擾動抑制水平γ與控制器存在的充分條件,然而通過定理1直接解決反饋增益K困難,因為定理1中存在非線性耦合項如PBK,難以直接運用MATLAB的LMI工具箱求解矩陣不等式獲得控制器參數,故需要進行矩陣變換,為此給出定理2. 定理2.對于給定常數0 則閉環系統(12)對所有滿足式(11)的時延均是漸近穩定的,并在零初始條件下具有給定的H∞擾動抑制水平γ,且H∞控制器增益為K=Y X?1. 證明.令定理1中的矩陣不等式(17)分別左乘右乘對角矩陣 和它的轉置矩陣,并且令 由(εX?R)R?1(εX?R)T>0,其中R>0是實對稱矩陣,X是適當維數任意矩陣,可得 推論2.對于給定常數0 則閉環系統(13)對所有滿足(11)的時滯均是漸近穩定的,且狀態反饋控制器增益為K=Y X?1. 推論2的證明與定理2的證明過程類似,只需將定理2中涉及計算誤差ω(t)項的行和列(即第5、6行,第5、6列)刪除即可,證明略. 注6.定理2給出了時變時延和H∞性能γ參數下,系統的控制器參數可以通過求解式(33)的可行解得到.推論2在給出了時變時延參數下,通過LMI工具箱求解式(34)的可行解可得控制器參數. 首先,構建倒立擺視覺伺服控制實驗平臺,如圖15所示.根據實際實驗平臺,可得倒立擺控制系統模型(6)中A和B參數為l=0.25m,m=0.109kg,J=0.009083kg·m2,g=9.81m/s2.根據式(4)可得 圖15 實驗平臺Fig.15 Experimental platform 常量參數γ,ε1,ε2經過多次實驗,可設置為γ=2.400,ε1=0.083,ε2=0.104. 然后針對閉環系統(12)和(13),求解定理2和推論2的式(33)和式(34),可得控制增益分別為 下面從兩個方面驗證所提方法的合理性和有效性. 1)分析圖像處理計算誤差對倒立擺系統性能的影響 分別從仿真和實際平臺實驗對控制增益K1和K2進行驗證,設置狀態初始值均為x0=[0 0.100 0 0]T. 仿真實驗:對控制增益K1和K2的仿真結果分別如圖16和圖17所示.圖16是考慮圖像處理計算誤差設計控制器(控制律K1)的控制效果曲線,圖17是不考慮圖像處理誤差設計控制器(控制律K2)的控制效果曲線.對比圖16和圖17可以發現,在控制律K1作用下,小車和擺桿均很快進入穩定狀態且波動很小,而在控制律K2作用下,雖然擺桿可進入穩定狀態,但是小車在軌道上來回大偏移量移動,控制律K1的控制性能明顯優于控制律K2的控制性能. 實際平臺實驗:在圖15所示的實驗平臺上,分別采用控制增益K1和K2進行實時控制實驗.實驗驗證控制增益K1可實現倒立擺穩定控制,其實時控制效果如圖18所示,小車和擺桿均在5s內進入穩定狀態,其穩定性能比較良好.由于實際實驗環境更加復雜多變,多重因素影響倒立擺的實際穩定性能,理論仿真不可能完全模擬實際條件,因此實際的實時控制實驗效果跟理論仿真存在一定的差異是合理的.然而,控制增益K2直接無法實現倒立擺的穩定控制. 圖16 在控制律K1下的小車位移和擺桿偏角(仿真)Fig.16 Cart position and pendulum angle in controller K1(simulation) 圖17 在控制律K2下的小車位移和擺桿偏角(仿真)Fig.17 Cart position and pendulum angle in controller K2(simulation) 圖18 在控制律K1下的小車位移和擺桿偏角(實時控制)Fig.18 Cart position and pendulum angle in controller K1(real-time control) 仿真和實際平臺實驗結果顯示,在同等常量參數下,定理2求解的控制律K1的控制性能明顯優于推論2求解的控制律K2的控制性能,由此表明對于含有視覺伺服的控制系統研究中,考慮圖像處理計算誤差對系統性能的影響非常必要. 2)分析圖像處理計算時間對倒立擺系統性能的影響 在控制增益K1下,通過仿真實驗可得保證閉環系統(12)穩定所允許的時變計算時延最大上界d2=0.089s,即所允許的圖像處理計算時間最大上界=0.045s,即當d2>0.089s(即>0.045s)后,系統(12)發散不可控. 為了詳細分析圖像處理計算時間對倒立擺系統性能的實際影響,在圖像處理過程中加上一定的計算時間,使分別達到0.029s,0.034s,0.037s,0.039s,0.040s,進而在控制增益K1下依次進行倒立擺實時控制實驗,并設置狀態初始初始值均為x0=[0 0 0 0]T.實時控制實驗的小車位移和擺桿偏角分別如圖19和圖20所示.從中可以發現:當=0.029s/0.034s/0.038s時,小車位移和擺桿偏角曲線圖沒有明顯差異,隨著增大,小車位移和擺桿偏角曲線圖波動略微增大,但沒有明顯變化,但是當=0.039s/0.040s時,小車位移和擺桿偏角曲線出現劇烈波動并且最終發散,失去穩定. 通過實時控制實驗發現,倒立擺能夠穩定控制的=0.038s,略小于仿真實驗得到的臨界值=0.045s,因為實際實驗環境比仿真環境更加復雜,理論仿真不可能完全與實際環境一致,故實際實驗得到的上界值小于仿真實驗得到的上界值是合理的.此外,實驗尤其表明,圖像處理計算時間對倒立擺系統性能具有非常明顯影響,故考慮其時變特性設計控制器更加符合實際. 圖19 不同圖像處理計算時間上界的小車位移Fig.19Cart position in different upper bound of image processing computational time 圖20 不同圖像處理計算時間上界的擺桿偏角Fig.20Pendulum angle in different upper bound of image processing computational time 本文主要研究帶有時變圖像處理計算時間和計算誤差的倒立擺視覺伺服實時控制問題.首先研究設計了一種網絡化倒立擺視覺伺服控制實驗平臺,提出了小車位移和擺桿偏角的視覺傳感測量實時計算方法,并統計分析了圖像處理計算時間和計算誤差特性,建立了帶有時變計算時間和計算誤差的倒立擺視覺控制系統閉環模型,證明了系統穩定性并建立了反映圖像處理計算時間與系統穩定性能之間的關系且給出了系統對計算誤差的擾動抑制水平γ,并進行了H∞控制器設計.與目前不考慮計算時間和計算誤差或將計算時間視為定時滯進行研究倒立擺視覺實時控制方法相比[18?21],本文提出的帶時變計算時間和計算誤差的倒立擺視覺H∞控制研究更加具有優勢.另外,本文研究內容可進一步拓展到雙并聯倒立擺視覺伺服控制系統,這是后續一項十分有價值的研究工作.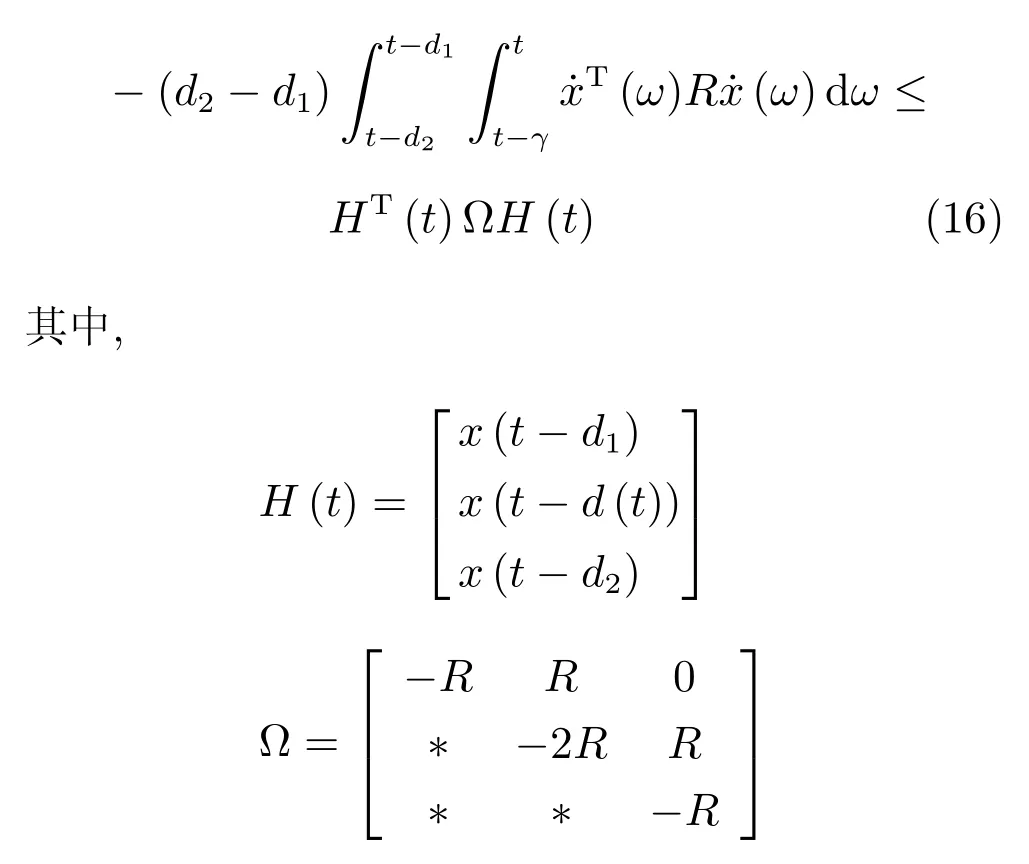





5 控制器設計



6 仿真和實時控制實驗
7 結論
 猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00作文·小學低年級(2024年2期)2024-04-29 00:00:00作文·小學低年級(2023年3期)2023-04-29 00:00:00小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42小主人報(2022年4期)2022-08-09 08:52:06中學生數理化·中考版(2022年11期)2022-02-16 07:01:20小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50發明與創新(2016年38期)2016-08-22 03:02:52太空探索(2016年5期)2016-07-12 15:17:55
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00作文·小學低年級(2024年2期)2024-04-29 00:00:00作文·小學低年級(2023年3期)2023-04-29 00:00:00小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42小主人報(2022年4期)2022-08-09 08:52:06中學生數理化·中考版(2022年11期)2022-02-16 07:01:20小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50發明與創新(2016年38期)2016-08-22 03:02:52太空探索(2016年5期)2016-07-12 15:17:55
