駐車系統(tǒng)關(guān)鍵參數(shù)分析及計算
2019-04-18 07:55:40王偉彭時敏
汽車實(shí)用技術(shù) 2019年7期
關(guān)鍵詞:系統(tǒng)
王偉,彭時敏
?
駐車系統(tǒng)關(guān)鍵參數(shù)分析及計算
王偉,彭時敏
(上海汽車變速器有限公司,上海 201807)
駐車系統(tǒng)是自動變速器和新能源減速器中的安全裝置,對保證整車安全起關(guān)鍵作用。文章以新能源減速器駐車系統(tǒng)設(shè)計為例,從駐車系統(tǒng)棘爪保持非P能力、棘爪防自鎖、駐車安全鎖止、最大出P力、“拒絕溜坡”車速及制動距離等方面提出了性能要求。作者根據(jù)自身經(jīng)驗,引入——防自鎖系數(shù)、鎖止系數(shù)等,優(yōu)化了數(shù)學(xué)模型,希望為后續(xù)駐車系統(tǒng)開發(fā)提供一定指導(dǎo)。
駐車系統(tǒng);防自鎖系數(shù);鎖止系數(shù);最大出P力;“拒絕溜坡”車速
引言
駐車系統(tǒng)是自動變速器和新能源減速器中一種安全裝置,其作用是將變速器輸出軸鎖止在變速器殼體,以確保整車安全制動[1-2]。目前國內(nèi)對駐車系統(tǒng)研究較少,參考文獻(xiàn)[3-4]雖然對駐車系統(tǒng)關(guān)鍵性能參數(shù)進(jìn)行了理論計算,但未對影響因子進(jìn)行優(yōu)化分析、也未指出駐車系統(tǒng)在設(shè)計時關(guān)鍵參數(shù)如何選擇。本文針對以上情況,引入防自鎖系數(shù)、鎖止系數(shù),優(yōu)化了數(shù)學(xué)模型。并推導(dǎo)出性能參數(shù)和影響因子之間的關(guān)系,希望為后續(xù)駐車系統(tǒng)開發(fā)提供一定指導(dǎo)。
1 棘爪保持非P能力分析
當(dāng)汽車處于正常行駛狀態(tài)時,由于路面顛簸或追尾等情況,垂直振動較大,此時棘爪應(yīng)盡量保持穩(wěn)定,具備保持非P能力,且不能卡入駐車齒輪凹槽內(nèi),造成非正常駐車,引起事故。
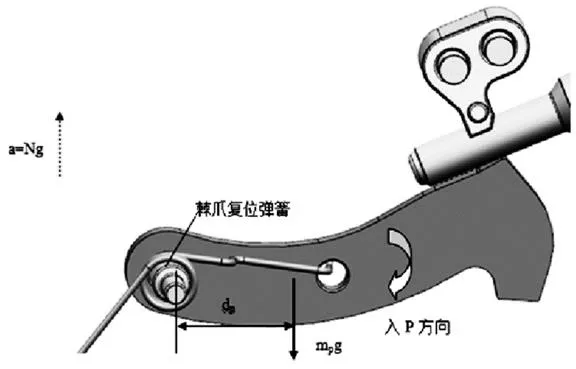
圖1 采用復(fù)位彈簧方式保持棘爪非P能力
一般駐車系統(tǒng)均采用復(fù)位彈簧軟限位方式使棘爪具有保持非P檔功能,如圖1所示。
而對于棘爪采用軟限位-回位彈簧的駐車系統(tǒng),回位彈簧不僅在出P過程中產(chǎn)生回位加速度,更需要在NP檔時具備限位和保持穩(wěn)定的能力。
圖3力學(xué)方程應(yīng)滿足:

根據(jù)經(jīng)驗,豎直加速度a=Ng=(9-10)g。
棘爪復(fù)位彈簧預(yù)緊扭矩Msp1表示為:

式(2)中:
“+”表示棘爪入P方向與重力方向一致,“-”表示棘爪入P方向與重力方向相反。
mp——棘爪質(zhì)量(kg);dp——垂直于重力方向棘爪質(zhì)心至回轉(zhuǎn)中心距離(m)。
2 棘爪-駐車齒輪防自鎖分析
整車在P檔狀態(tài)下,棘爪受換擋軸及錐套作用,棘爪齒形卡入駐車齒輪齒槽中,實(shí)現(xiàn)駐車功能,當(dāng)換擋軸推動錐套從P檔位轉(zhuǎn)至NP檔位時,棘爪能自動從駐車齒輪卡槽中彈出。
以棘爪為研究對象,圖2為棘爪防自鎖受力分析圖,若要實(shí)現(xiàn)棘爪能自動彈出,則需滿足:

若定義棘爪運(yùn)動方向與棘爪受駐車齒輪摩擦力銳角為β2,棘爪與駐車齒輪靜摩擦系數(shù)μs1,由上式可推導(dǎo)出棘爪防自鎖系數(shù)K1=tanβ2/μs1:
由于β2越大,駐車系統(tǒng)出P力/扭矩越大,導(dǎo)致機(jī)械駐車換擋手感較“重”或電駐車駐車電機(jī)選型困難,因此防自鎖系數(shù)還需滿足:

根據(jù)經(jīng)驗,一般棘爪-駐車齒輪摩擦系數(shù)μs1取0.09- 0.15,β2可選擇為12-17°左右。
3 駐車鎖止功能分析
根據(jù)1、2小節(jié)可知,棘爪在駐車齒輪和棘爪復(fù)位彈簧的作用下一直具有脫離P檔能力,為了實(shí)現(xiàn)系統(tǒng)P檔駐車鎖止功能,需要在棘爪頭部增加一錐套實(shí)現(xiàn)鎖止。因此可以說駐車系統(tǒng)鎖止功能是建立在棘爪-駐車齒輪防自鎖的情況。
以錐套為研究對向,圖3是鎖止元件-錐套在P檔受力分析。

圖3 鎖止元件-錐套受力分析圖
若定義錐套運(yùn)動方向與錐套受棘爪摩擦力銳角為β4,錐套運(yùn)動方向與錐套受導(dǎo)向器摩擦力銳角為β5,錐套與棘爪或?qū)蚱黛o摩擦系數(shù)為μs2。
為了實(shí)現(xiàn)駐車系統(tǒng)鎖止功能,需滿足:

由于錐套為回轉(zhuǎn)體,β4=β5,則F4=F5,則可推導(dǎo)出駐車系統(tǒng)的鎖止系數(shù)K2=μs2/tanβ4為:

由于β4越小,駐車鎖止功能越可靠,出P力越大,導(dǎo)致機(jī)械駐車換擋手感較“重”或電駐車駐車電機(jī)選型困難,因此鎖止系數(shù)還需滿足:

根據(jù)經(jīng)驗,一般錐套-棘爪/導(dǎo)向器靜摩擦系數(shù)μs2取0.09-0.15,β4可選擇為2-5°左右。
4 最大出P力計算
駐車系統(tǒng)最大出P力是指整車在滿載和最大靜態(tài)坡度下,即駐車齒輪受到整車最大靜態(tài)扭矩Tt作用下,錐套最大脫出P檔力。
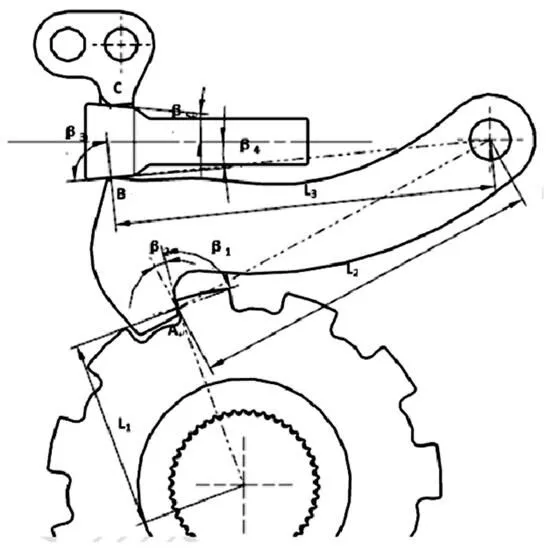
圖4 采用內(nèi)部位置關(guān)系計算最大出P力示意圖
圖4中:
A——駐車齒輪-棘爪作用點(diǎn)位置;B——棘爪-錐套作用點(diǎn)位置;
C——錐套-導(dǎo)向器作用點(diǎn)位置;L1——A處與駐車齒輪回轉(zhuǎn)中心的距離(m);
L2——B處與棘爪回轉(zhuǎn)中心的距離(m);L3——C處與棘爪回轉(zhuǎn)中心的距離(m);
β1——駐車齒輪A處運(yùn)動方向與駐車齒輪受棘爪摩擦力銳角(°);
β2——同第3小節(jié)中β2,即棘爪A處運(yùn)動方向與棘爪受駐車齒輪摩擦力銳角(°);
β3——棘爪B處運(yùn)動方向與棘爪受錐套摩擦力銳角(°);
β4——同第4小節(jié)中β4,錐套B處運(yùn)動方向與錐套受棘爪摩擦力銳角(°);
β5——同第4小節(jié)中β5,錐套C處運(yùn)動方向與錐套受導(dǎo)向器摩擦力銳角(°)。
在計算駐車系統(tǒng)最大出P力時,需要分別對駐車齒輪、棘爪、錐套為研究對象,計算其內(nèi)部作用力。
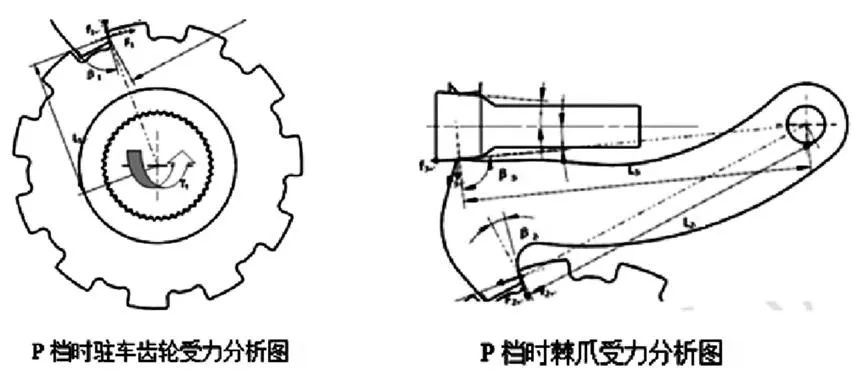
圖5 駐車齒輪及棘爪受力分析圖
駐車齒輪受棘爪正壓力F1:

棘爪受錐套正壓力F3:

當(dāng)F3>0時,可推導(dǎo)出K1>1,棘爪有逃離駐車齒輪趨勢,棘爪與駐車齒輪才能實(shí)現(xiàn)防自鎖,其與第3小節(jié)分析一致。
錐套最大出P力Fp:

帶入防自鎖系數(shù)K1和自鎖系數(shù)K2:上式可得:

由于棘爪-駐車齒輪、棘爪-錐套的摩擦均為滑動摩擦,且材料均為合金鋼,可近似認(rèn)為:μs=μs1=μs2,則上式可轉(zhuǎn)換為:

由上式可知:
(a)當(dāng)Fp>0時,即駐車系統(tǒng)滿足自鎖功能,需滿足K1>1,K2>1,此與2、3小節(jié)分析一致。
(b)β2越大,防自鎖系數(shù)K1越大,系統(tǒng)防自鎖能力越強(qiáng),最大出P力越大;
(c)β4越小,鎖止系數(shù)K2越大,系統(tǒng)自鎖能力越強(qiáng),最大出P力越大。
5 “拒絕溜坡”車速
當(dāng)車輛掛入P檔停在最大坡度上,由于存在不利的“齒對齒”位置,棘爪和駐車齒輪齒頂接觸,在坡道方向分力作用下,棘爪必須安全地嚙入到下一個齒中,到齒輪下一個齒的旋轉(zhuǎn)角度必須被設(shè)計或滿足有車輛自身引起的瞬時驅(qū)動速度不會導(dǎo)致“拒絕需求”,若駐車鎖止車速vp小于“拒絕溜坡”車速vd時,可能會發(fā)生車輛在坡度溜坡現(xiàn)象,致使車輛無法入P檔。因此要求驅(qū)動速度需不大于駐車鎖止車速vp。
駐車系統(tǒng)導(dǎo)致整車滾動行駛最大距離Sro:
根據(jù)經(jīng)驗,一般駐車系統(tǒng)導(dǎo)致車輛滾動行程距離Sro不大于62mm,“拒絕溜坡”車速vd(m/s):

若最大坡度為25%時,可計算出vd=1.95km/h,這也要求駐車鎖止車速vp位于2km/h-5km/h[1]內(nèi)。
6 案例分析
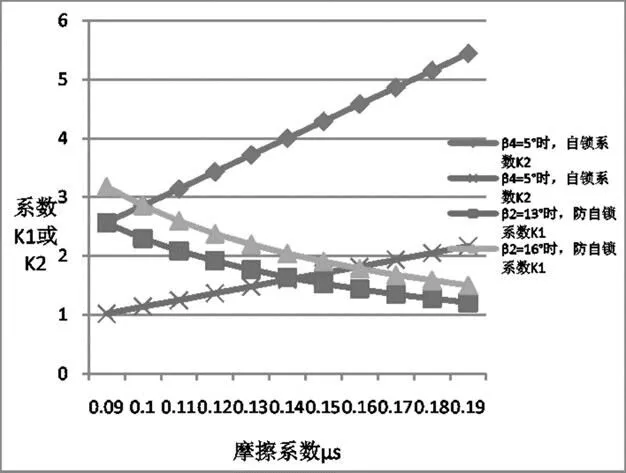
圖6 摩擦系數(shù)與鎖止系數(shù)和防自鎖系數(shù)的關(guān)系
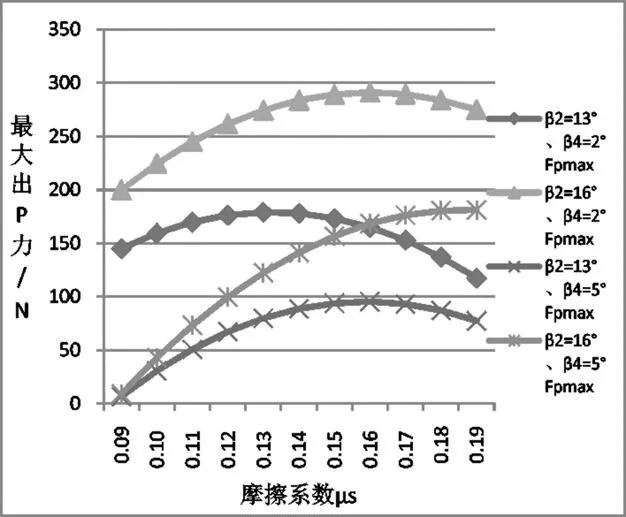
圖7 P檔時錐套最大出P力與摩擦系數(shù)、β2、β4的關(guān)系
某駐車系統(tǒng)的駐車齒輪最大靜態(tài)載荷Tt=423.8N.m,在forward工況下,L1=46.329mm、L2=98.55mm、L3=93、β1=84.17°、β2=13°或16°、β3=89.26°、β4=β5=2°或5°,計算不同摩擦系數(shù)下的駐車系統(tǒng)防自鎖系數(shù)K1、鎖止系數(shù)K2和錐套最大出P力Fpmax。
由圖(7)可知,隨著摩擦系數(shù)增大,最大出P力時先增大再減小。
7 小結(jié)
(1)本文推導(dǎo)出駐車系統(tǒng)關(guān)鍵性能指標(biāo)——動靜態(tài)載荷、棘爪保持非P能力、棘爪防自鎖、駐車安全鎖止及最大出P力、“拒絕溜坡”車速。
(2)本文在分析棘爪防自鎖時,引入防自鎖系數(shù)K1,并指出在滿足換擋舒適性和防自鎖要求下,1<K1<5;
(3)本文在分析駐車系統(tǒng)自鎖時,引入自鎖系數(shù)K2,并指出在滿足換擋舒適性和鎖止雙重要求下,1<K2<5;
(4)本文指出最大出P力Fpmax與K1和K2正相關(guān),隨著K1和K2增大,最大出P力Fpmax增大,且指出隨著摩擦系數(shù)增大,最大出P力Fpmax時先增大再減小。
[1] Harald Naunheimer 汽車變速器理論基礎(chǔ),選擇,設(shè)計與應(yīng)用[M]. 機(jī)械工業(yè)出版社,2014.
[2] 費(fèi)寧忠.基于ADAMS自動變速器駐入制動速度研究[J].上海汽車,2016.12.
[3] 張春喜,趙寶忠,李麗. 自動變速器駐車機(jī)構(gòu)的設(shè)計[C].2012年APC聯(lián)合學(xué)術(shù)年會論文集,2012.
[4] 陳華,陳辛波等.自動變速器駐車機(jī)構(gòu)性能分析及研究——拖拉機(jī)與農(nóng)用運(yùn)輸車.2014.
Parking Lock System Key Performance Study and Analysis
Wang Wei, Peng Shimin
(Shanghai Automobile Gear works, Shanghai 201807)
The parking lock system is an important safety subsystem in both automatic transmission and electric vehicle. This purpose of this paper is to explain the requirements in the design phase, including anti-self lock of parking pawl,keeping NP capability of parking paw,safe parking, pull-out force. The paper introduces new concept--anti-self lock coefficient and lock-up coefficient, and optimizes the mathematical model, which could provide a reference for parking lock system analysis.
parking lock system; anti-self lock coefficient; lock-up coefficient; the max pull-out force; the reject slope slipping speed
U467
A
1671-7988(2019)07-66-04
王偉,中級工程師,碩士,就職于上海汽車變速器有限公司。
U467
A
1671-7988(2019)07-66-04
10.16638/j.cnki.1671-7988.2019.07.022
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32