同步磁阻電動機改進高頻注入位置估算算法研究
2019-04-25 03:07:06杜逸康
微特電機 2019年4期
杜逸康,廖 勇,李 福,林 豪
(重慶大學,重慶 400044)
0 引 言
同步磁阻電動機是一種轉子無需永磁體和勵磁繞組的無刷電機,它依靠轉子的凸極性,產生磁阻轉矩,結構簡單,成本較低,調速性能好。對同步磁阻電動機采用矢量控制,需要獲得較高精度的轉子位置信號,傳統控制系統通過安裝位置傳感器實現這一需求。而高精度位置傳感器本身價格昂貴,穩定性差,并且需要額外的空間,在對成本控制要求高,對機械結構空間限制多的場合難以應用。為了解決這一難題,諸多學者針對同步磁阻電動機的無位置傳感器控制進行研究,提出多種位置檢測方法。
由于同步磁阻電動機的凸極性,電機的狀態變量如電壓、電流和磁鏈中均含有轉子位置信息,通過合理的解算方法可提取出轉子的轉速或位置信號。例如利用在兩相靜止α,β坐標系中,定子反電動勢是含有轉子位置角項的量,對觀測到的反電動勢直接解算可獲得轉子角度[1]。這類方法運算簡單,但在低速段,漏抗壓降和電阻壓降占比較大,反電動勢較小,參數誤差影響較大;在零速時,反電動勢為零,無法進行解算。磁鏈觀測法通過靜止兩相坐標系下的定子磁鏈,與d,q兩相旋轉坐標系中的定子磁鏈進行對比,建立磁鏈觀測器,即可求得轉子角位置[2-7]。文獻[2]采用考慮交叉飽和影響的電機模型,提高磁鏈觀測精度,同時在低速時引入信號注入法,校正磁鏈觀測結果。文獻[3]在文獻[4]、文獻[2]的基礎上引入全維觀測器,減小電機參數變化對定子磁鏈觀測帶來的影響。文獻[5]在電流微分檢測方法的基礎上,分析起動和低速階段的算法和控制方法的調整,并降低對電機參數準確性的要求。文獻[6]重點考察各類損耗對磁鏈觀測所帶來的影響,并建立基于最大效率的控制模型。文獻[7]基于文獻[5],引入利用q軸電流的速度觀測器和魯棒控制器,優化控制效果。磁鏈觀測器優點在于對負載變化和轉速變化不敏感,但與反電動勢解算法相似,對電機參數變化敏感;在零轉速點無法運行,同時在低速段由于積分器零漂問題,計算得到的磁鏈具有積分效應,造成較大誤差。
為解決零速點及低速段的位置觀測問題,文獻[8]基于文獻[9],提出電流微分檢測法,其基本思路是利用逆變器若干開關周期內的三相電感瞬時值計算轉子角位置。該方法計算簡單,無需電機參數,且每個開關狀態可更新轉子角位置,算法分辨率高,有利于實現高精度控制。但電流微分檢測法需要測量開關過程中的電流紋波值,對電流傳感器和電流測量環節的測量精度和采樣速度都要求極高,且控制系統必須采用電流滯環控制,轉矩脈動相比SPWM和SVPWM控制更大,當轉速升高后該問題更為顯著,因此該類方法的應用較為局限。
同樣,為彌補磁鏈觀測類方法在低速段及零速點的問題,利用電機的凸極性,采用高頻注入法,可得到轉子位置信息[10]。文獻[11]提出在低速段使用高頻電流注入法,在d軸方向上注入一個電流小信號,利用定子端反饋的高頻電壓信號跟蹤轉子位置角。文獻[12]采用高頻旋轉電壓注入,可在定子電流信號中檢測二倍頻的高頻分量,注入信號與檢測信號的相位差即為實際電角度。對比不同方法產生的估計誤差,脈振信號注入法要優于旋轉信號注入法,而在魯棒性和瞬態響應速度上,旋轉信號注入法要優于脈振信號注入法,總體來看,脈振注入法更優[13]。在脈振信號注入法的研究中,電壓脈振信號相比電流脈振信號,在同樣的注入頻率和功率下,可以產生更大的參考軸系誤差角以便于追蹤轉子位置,并產生更小的轉矩和轉速脈動[14]。
高頻注入法目前已成為多類位置估算算法在低速段的主要方法。但現有的脈振電壓注入法的反饋信號處理中,需要系統生成與反饋信號頻率相同、相位相同的正弦信號,并將該信號與反饋電流信號相乘,才能將所需的誤差量信號轉為直流量,進而通過濾波處理得到輸入PI環節的誤差信號。當系統生成的正弦信號與反饋信號相位不同時,乘法計算后得到的結果中,有效信號占比會減小,最差的情況下,計算結果中包含真實誤差信息的信號量大小為零,無法通過PI環節實現有效的位置跟蹤。
基于上述現有的理論研究,本文研究一種采用脈振高頻電壓信號注入法的同步磁阻電動機低速段位置估算方法,其核心思路:在d軸上注入高頻脈振電壓信號后,在反饋電流d軸分量中也存在相同頻率且包含參考坐標系與真實坐標系相對誤差的信號,且該信號與q軸高頻反饋信號經過相同的采樣和A/D轉換環節,相位滯后相同。因此在文獻[15]的基礎上,在反饋信號處理過程中,將d軸的電流信號與q軸電流信號相乘,從d,q軸電流信號的乘積中直接提取誤差信號。不利用系統產生的高頻參考信號,從而避免原方法解算過程中系統產生的高頻參考信號需要進行相移補償的缺點。
1 同步磁阻電動機數學模型
1.1 同步磁阻電動機基波模型
忽略同步磁阻電動機的鐵心損耗、飽和及交叉耦合效應,在d,q同步旋轉坐標軸系中,理想同步磁阻電動機的電壓方程如下:
(1)
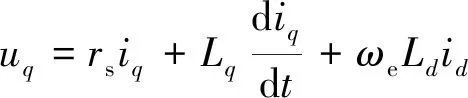
式中:ud,uq為定子電壓d,q軸分量;id,iq為定子電流d,q軸分量;rs為定子電阻;Ld,Lq為d,q軸電感;ωe為轉子電角速度。同步磁阻電動機的轉矩表達式:
(3)
式中:p為電機轉子極對數。
1.2 高頻激勵信號下的電機模型
對高頻注入信號激勵下的電機模型而言,由于注入的電壓信號幅值較小,反饋電流較小,故電阻壓降項相較電感壓降項可忽略不計;在低轉速至零轉速段,運動電勢項由于轉速較低也可忽略。因此,式(1),式(2)簡化為頻域表達式后,將復頻域算子s用jωh替換,得到[16]:
(4)
式中:各符號的上標f表明此式中的變量為在高頻注入下的d,q軸定子電壓、電流;lq,ld為d,q軸高頻電感;ωh為對應高頻的電角速度。
2 高頻脈振電壓信號注入法及其改進
2.1 傳統高頻注入法及存在的問題
在低轉速區間,向電機d軸的電壓分量注入高頻小幅值的脈振電壓信號,從電機機端可檢測到反饋的高頻電流信號。當控制所用坐標軸系和同一時刻真實的旋轉軸系有偏移,如圖1所示,可得參考坐標軸系與真實坐標軸系下的變量轉換關系:
(5)

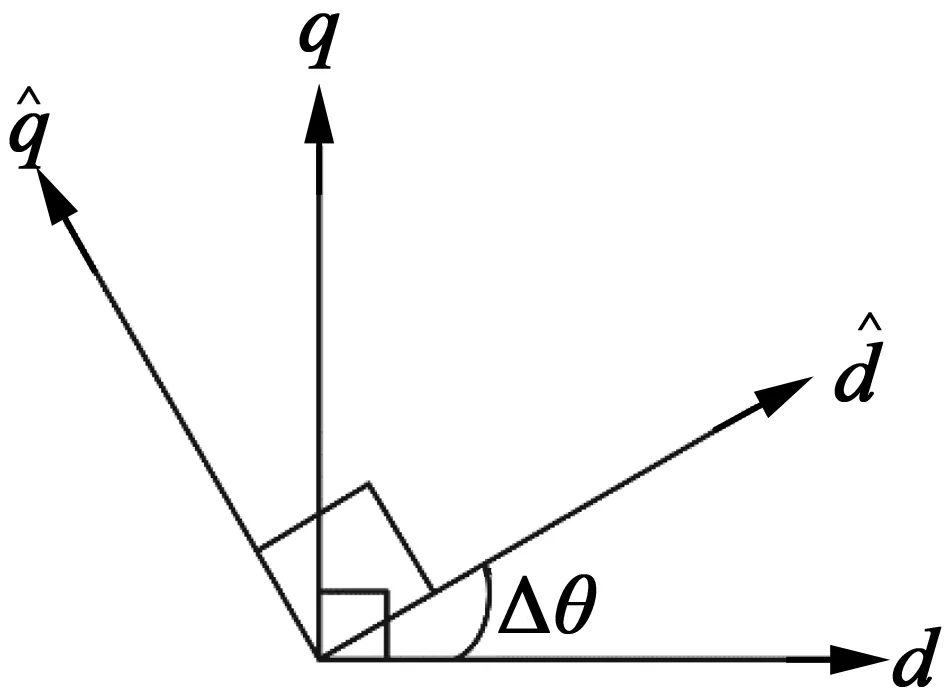
圖1 參考坐標系與真實坐標系對應關系
在參考坐標軸系上注入如下的高頻電壓脈振信號:
(6)
式中:A為注入信號的幅值,通常在5~10 V之間。利用式(5),可以得到在真實坐標軸系下的注入信號:
由于參考坐標系和真實坐標軸系的電流間也具有式(5)的變換關系,我們將式(7)代入式(4)的高頻同步磁阻電動機模型中,可以得到參考坐標系下的高頻電流反饋:
(8)

其中:
(10)


圖2 iq高頻信號處理環節圖
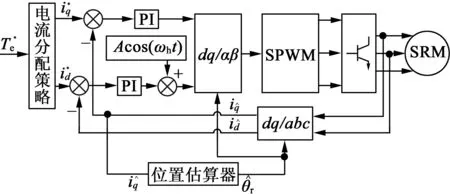
圖3 同步磁阻電動機無位置傳感器控制框圖
在基本的高頻脈振注入法中,對q軸電流高頻信號的解析過程較為復雜。提升帶通濾波器(以下簡稱BPF)的濾波效果,需要更高的階數,這會增大算法的運算量。對上述問題,文獻[15]將反饋的q軸電流直接與高頻信號相乘,相當于對q軸電流信號在頻域上做整體位移,將對應頻率點高頻信號轉為直流信號,將基波信號轉為高頻信號,處理過程如圖4所示。相比采用BPF的原方法,本方法減少運算量,提高了觀測系統可靠性。
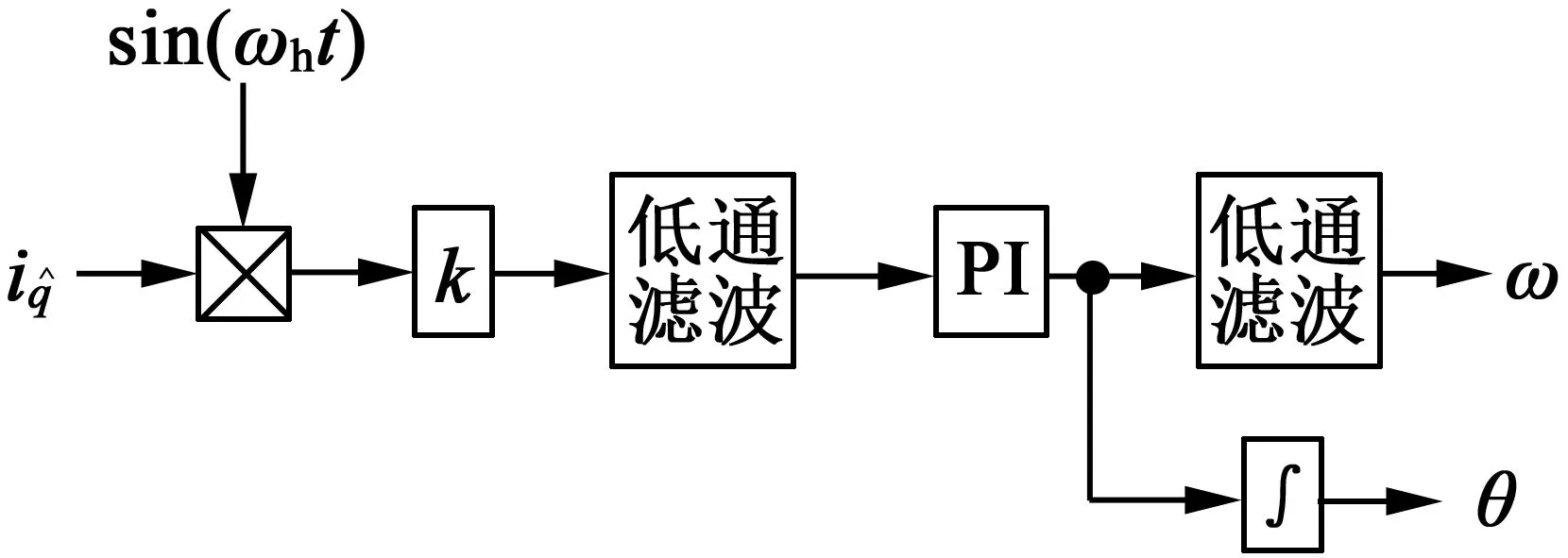
圖4 文獻[15]改進后的iq處理環節
而在系統運行過程中,為得到q軸電流值,需要通過傳感器獲取電流信息,并經過A/D信號的采樣電路,輸入控制系統,控制系統按照固定的頻率計算并輸出控制值,這些環節均會引入一定的相位滯后。因此,為能正確取樣q軸目標頻率的信號,我們需要對第一步處理中的高頻信號相位做相應補償,但上述滯后的具體值很難確定,在文獻[15]、文獻[17]中也未提到如何處理這一問題。
為更好地闡述該問題,可分析反饋信號與不同相位同頻率高頻信號相乘后的結果。假設q軸電流中的高頻分量表達式:
(11)

理想狀態下,ρ為零,處理后的結果:
(13)
相位滯后ρ的出現會造成直流分量相對于整體高頻信號的成分減小,這對信號的提取非常不利。為了彌補直流分量減小而設置過大的增益系數k又可能會造成PI環節的振蕩。
如果能夠測得ρ值,或者通過理論推算得到,就能夠抵消這一誤差。推算ρ值需要考慮傳感器、采樣電路、濾波算法等多方面因素,較為復雜。而對目標高頻信號直接跟蹤相位差,需要BPF直接濾波得到對應頻率點的信號,這與文獻[15]中不使用BPF從而減小運算量的目標相悖。
2.2 改進的高頻信號注入法

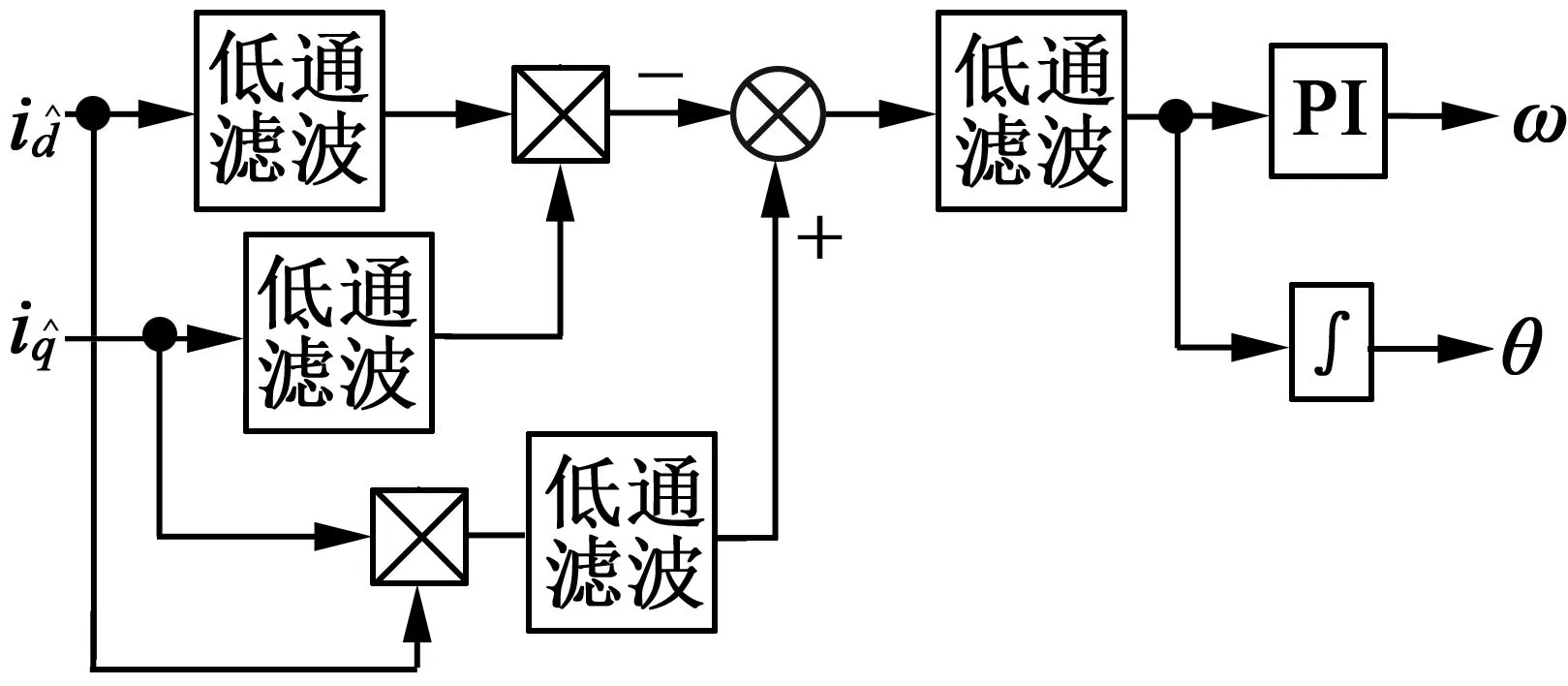
圖5 改進后的高頻信號處理環節


(15)
其中:
(16)


3 實驗驗證
本文所述高頻注入法已通過實驗論證。實驗平臺為基于DSpace 1103的電機控制系統,實驗電機為一臺同步磁阻電動機,基本參數如表1所示。
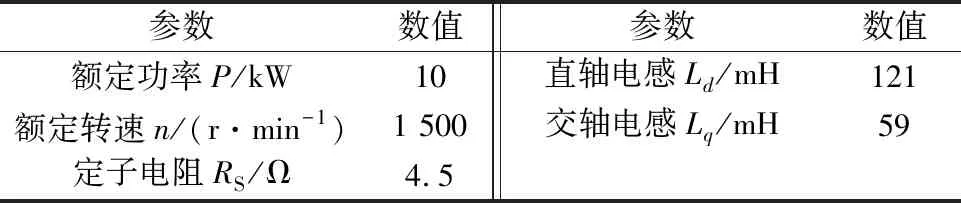
表1 同步磁阻電動機參數表
電機轉速在45 r/min時,空載狀態下的觀測實驗波形如圖6~圖8所示。圖6為本文改進的高頻注入法觀測得到的轉子位置電角度,與光碼傳感器測得的轉子實際位置電角度對比,圖7為二者計算得到的誤差值,圖8為空載狀態下的三相電流波形。
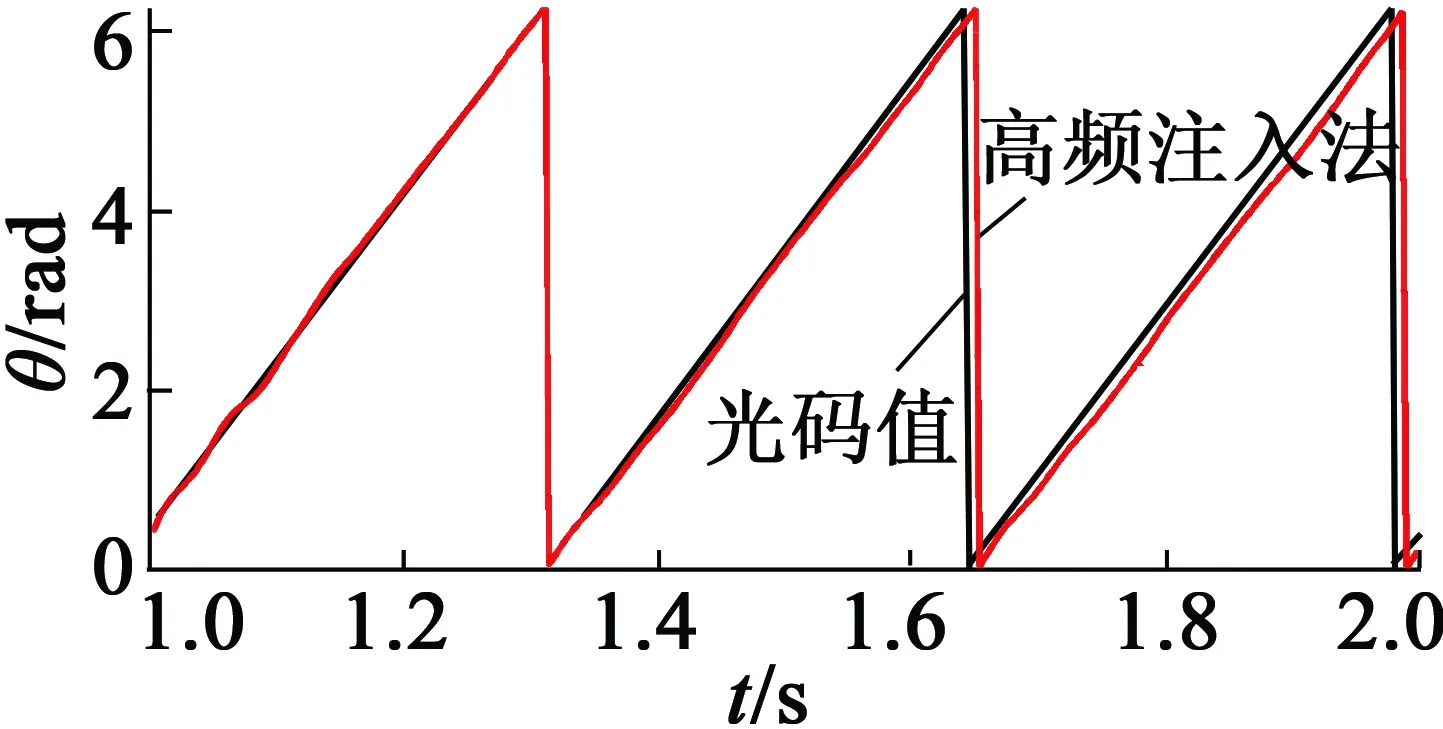
圖6 高頻注入法轉子位置電角度觀測值與傳感器讀取值
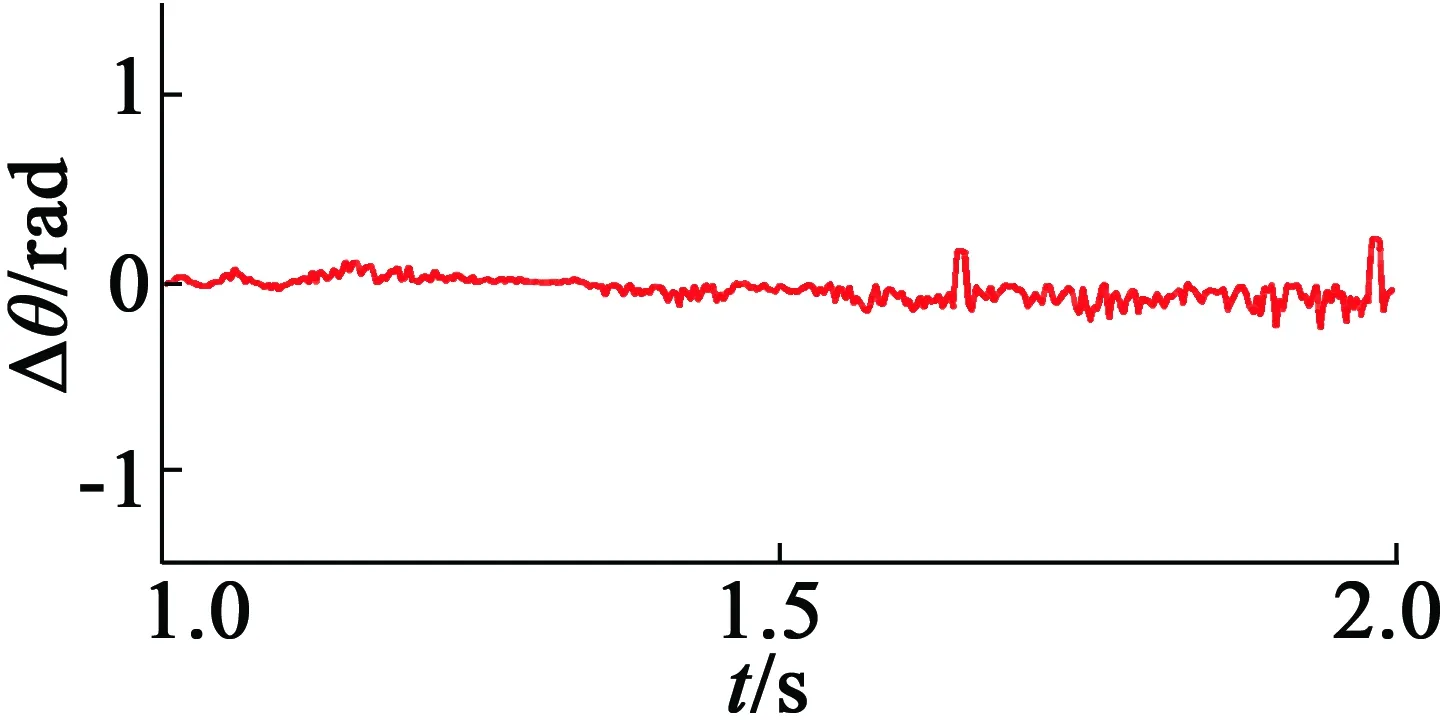
圖7 高頻注入法觀測值誤差
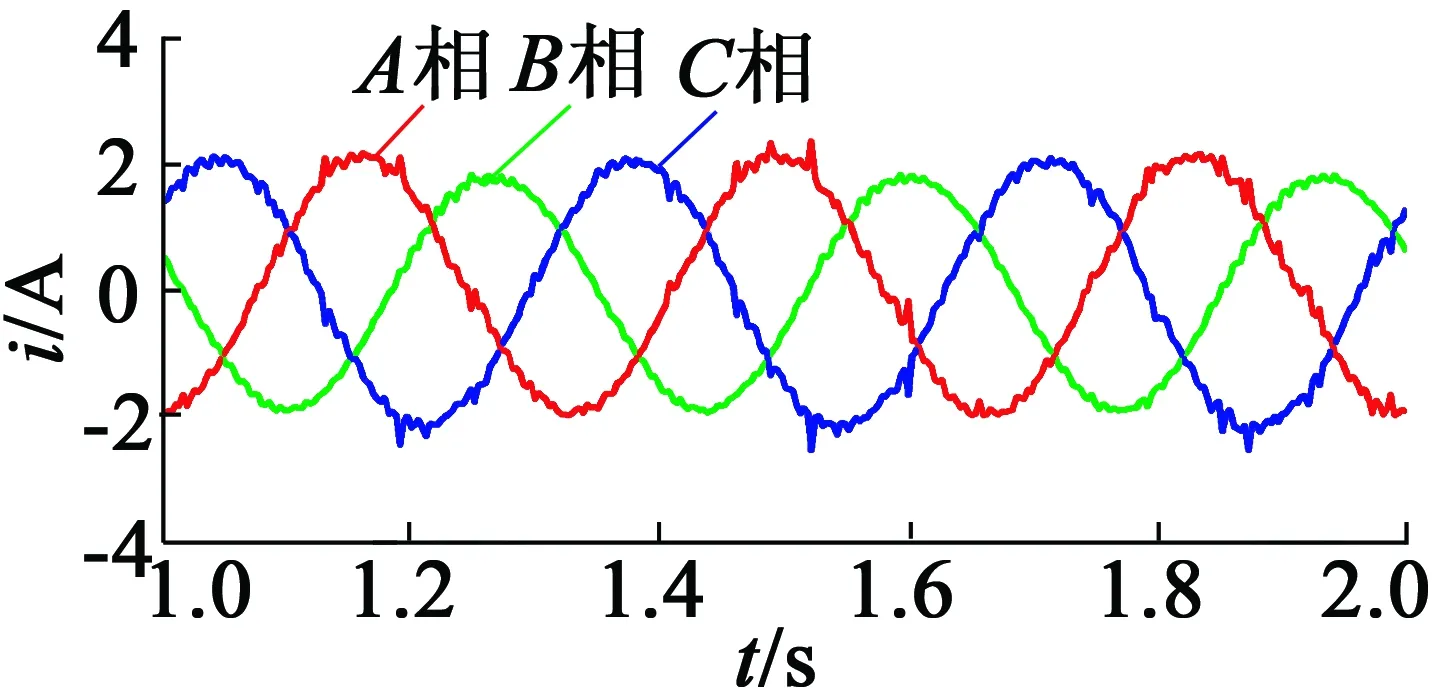
圖8 三相電流波形(45 r/min,空載)
由圖6可見,在低轉速下,改進的信號注入法可以有效地跟蹤轉子位置角信息,并由圖7可證,在未進行補償的情況下擁有較少的相位滯后和較小的角度觀測誤差(0.1 rad約合5.7°),能夠實現較好的跟蹤效果。
圖9、圖10為45 r/min下,文獻[15]的原始方法與本文改進后的方法在同一控制系統下的轉子位置角估計值比較。
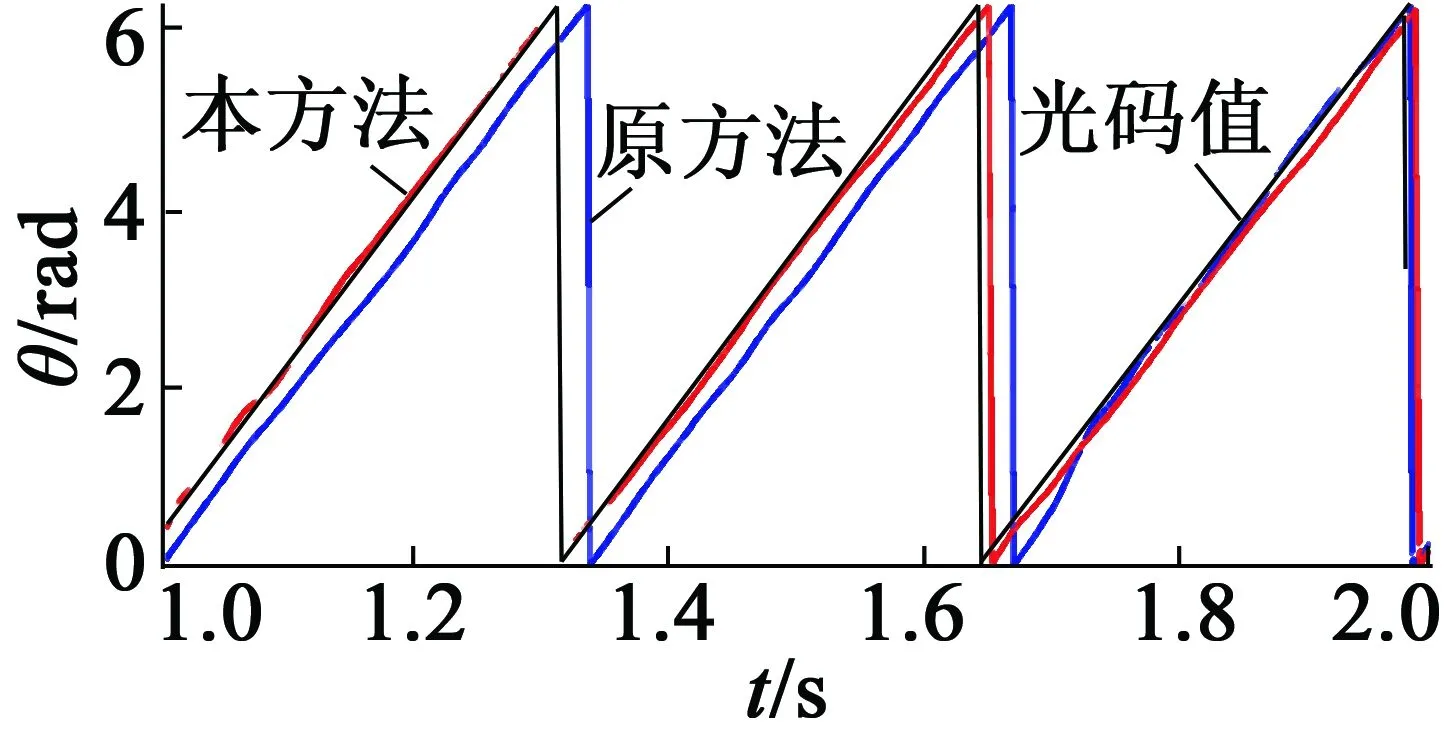
圖9 改進方法與原方法對比
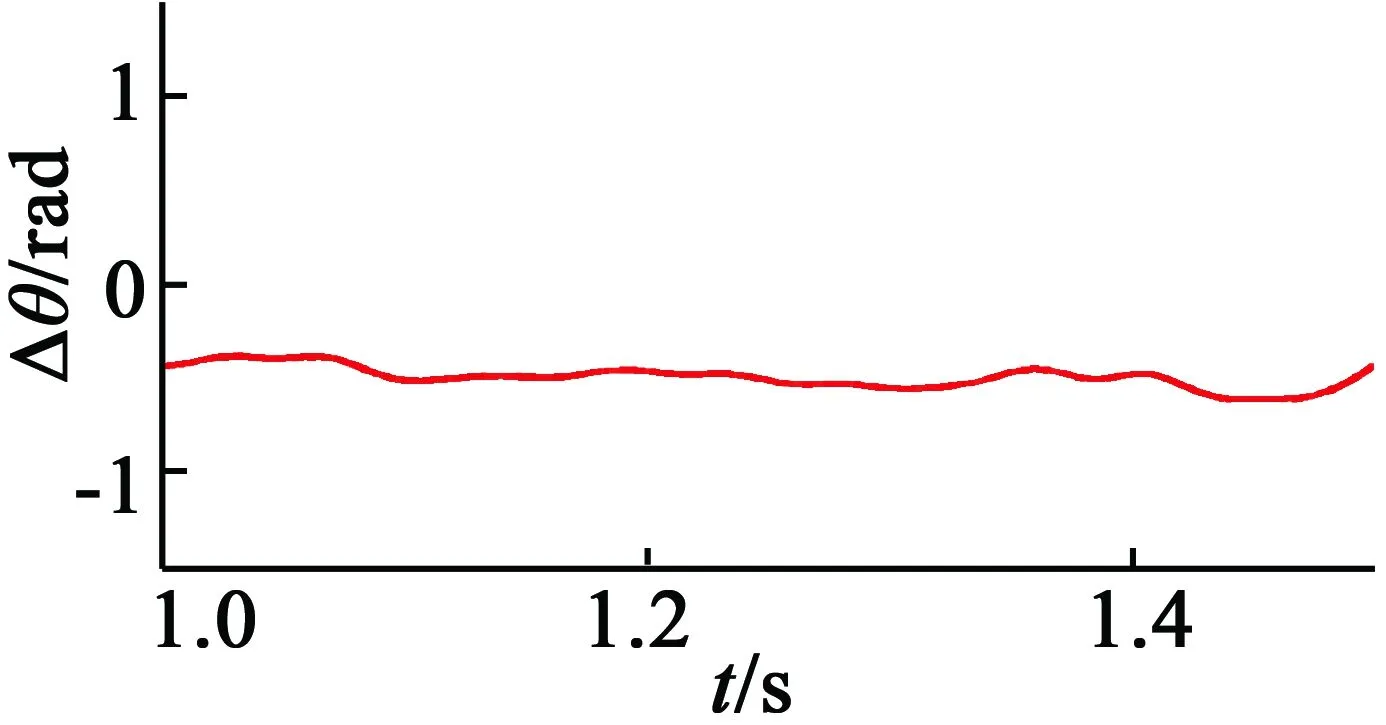
圖10 原方法觀測值誤差
由圖9可見,在改進方法已經穩定跟蹤后,原方法在觀測中具有更大的相差和振蕩(1.7 s前后具有明顯抖動),實際反映了在該注入信號下,原始方法已經不能準確地跟蹤轉子位置角。同時,圖10也反映在實驗中,原方法觀測角度誤差較大,跟真實位置角之間具有20°左右的角度觀測誤差。而對比圖7,本文改進后的方法采用同樣的信號注入頻率和幅值大小(10 V,100 Hz),在兩者均不進行觀測角度補償的條件下,仍然能夠得到一個較穩定、且相位滯后更小的原始結果,這充分說明改進后的方法具有更好的系統穩定性和觀測效果。
4 結 語
本文對同步磁阻電動機位置估測算法中脈振電壓信號注入法進行了分析,探討了現有方法反饋信號處理過程中需要進行相位補償的問題。利用d軸高頻信號與q軸高頻信號相位滯后保持一致的特點,使用d,q軸電流的乘積及低通濾波器,將d,q軸電流高頻信號乘積作為供PI環節跟蹤的誤差信號,實現角位置的跟蹤。相較于原方法,本方法不需要進行反饋高頻信號的相位跟蹤及參考正弦信號的滯后相位補償。在不增加系統運算量的前提下減小了角位置估測算法的誤差,提高了算法的穩定性。通過電機實驗,對比本文改進方法和原方法的角位置跟蹤效果,在轉速45 r/min下觀察到本方法相較原方法,具有跟蹤誤差更小,穩定性更好的實驗結果,論證了本方法的有效性和優點。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56