單目攝像機線性模型可靠性分析與研究
2019-04-26 01:43:16賈星偉殷晨暉隋國榮
光學儀器 2019年1期
賈星偉,殷晨暉,隋國榮
(上海理工大學 光電信息與計算機工程學院,上海 200093)
引 言
工程測量學作為一門古老的學科,集光學、電子學、傳感器、圖像、制造及計算機等技術為一體,應用于人類生活、生產和科研等各個領域[1]。經濟社會的進步促進了測量技術的發展,同時對測量技術提出了更高的要求。20世紀80年代以來,現代工業生產利用計算機視覺進行的非接觸式測量成為一種新興的測量技術[2]。計算機視覺的主要任務是根據二維圖像信息獲得實際三維場景中物體的空間位置、形狀等幾何信息[3],從而進行物體識別與重建等。其關鍵是對該系統建模,找到圖像與物體的映射關系,精準的視覺測量建立在精確的映射關系的基礎之上[4-5]。
攝像機成像系統是較為復雜的光學系統。攝像機模型是光學幾何關系的簡化,最簡單的模型為針孔模型[6],是一種理想的近似模型,由三維空間到平面的中心投影變換所給出[3]。其他如Martins等[7]提出的雙平面攝像機模型,不要求光線必須經過光心,可利用任一圖像點計算出兩標定平面上的對應點,進而確定產生該圖像點的光線。針孔線性模型由射影幾何得來,自攝影測量學興起時一直沿用至今[8],計算機視覺在工業自動化檢測、遙感圖像分析、醫學圖像處理等領域越來越廣泛的應用[9-11]普遍使用針孔模型作為理論基礎。航空攝像機獲取遙感圖像實現目標定位,根據直線透視投影不變性,在針孔成像模型的基礎上進行幾何畸變自動校正[12],能夠準確校正圖像變形,在2500 m高空作業時均方根誤差約為2 m。在大視場的雙目視覺測量系統中,由單目針孔模型結合兩臺攝像機的成像原理,構建系統模型參數,利用空間平行線及垂直線求解約束方程,實現系統的標定,避免了對標定物的依賴,平均標定誤差為0.51%[13]。進行大型工件三維尺寸檢測時,采用全線性標定方法,使用多個CCD攝像機(多于60個),并假設成像模型為針孔模型且不考慮畸變,對白車身(測量范圍為6 m左右)進行測量,誤差優于0.05 mm[14]。高精度的攝像機標定過程中,首先結合理想的針孔模型及透鏡畸變模型建立實際的攝像機模型,考慮圖像中心畸變小的問題,利用中心區域數據初步計算部分參數,再代入綜合模型逼近精確解,此方法重復性好,平均像素誤差僅為0.114 9 pixel[15]。
根據前述國內外文獻分析,可見大部分光學系統都采用了針孔模型進行分析。但缺乏相關文獻對針孔模型進行建模分析、設計并進行實驗研究以獲得相應的實驗結果,從而支撐將針孔模型用于攝像機光學系統的觀點。為此,本文分析、構建傳統攝像機線性模型;根據成像規律,設計新模板的視覺測量實驗,通過改變系統待測模板的線段長度,并利用21組數據擬合成像的線性結果,觀察分析攝像機成像能達到的線性度;在20個不同位置進行重復性實驗,進一步分析了該方法中針孔線性模型的實用性。實驗通過提取多組待測物的特征,直接進行圖像及實際線段的測量比較,分析攝像機線性模型測量精度。實驗結果顯示實際針孔模型可以實現相對測量誤差不超過1%,在該模型下重復測量誤差最大不超過0.3 mm量級,測量精度不低于0.1 mm,為計算機視覺中攝像機線性針孔模型的使用提供了重要的參考。
1 數學模型分析
1.1 基本成像模型
三維物體通過透鏡映射到成像面上,其中的變換關系可以由成像模型來描述。通常計算機視覺中廣泛使用針孔模型[3],它是簡化的光學成像線性模型,在數學上可以表示為三維空間到二維平面的中心投影。空間中任何一點P與光心O的連線交圖像于一點p,則p為P在圖像中的投影位置,如圖1所示。
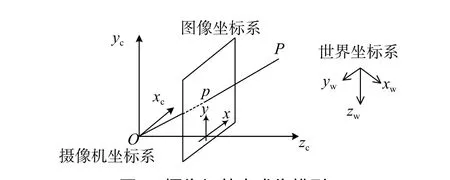
圖1 攝像機基本成像模型Fig. 1 Basic imaging model of camera
下面描述針孔模型數學建立過程[16],實現二維圖像點與三維空間的轉換。如圖2所示,在圖像上定義直角坐標系u、v為圖像像素坐標系,它以像素為單位,表示像點位于圖像上的行數與列數。為了用物理單位表示像點在圖像中的位置,需要建立圖像物理坐標系,光軸交圖像平面于o點,以o點為原點,x軸和y軸分別平行于u、v,構成以物理單位(如mm)表示的圖像坐標系。
圖像物理坐標轉化為像素坐標,有
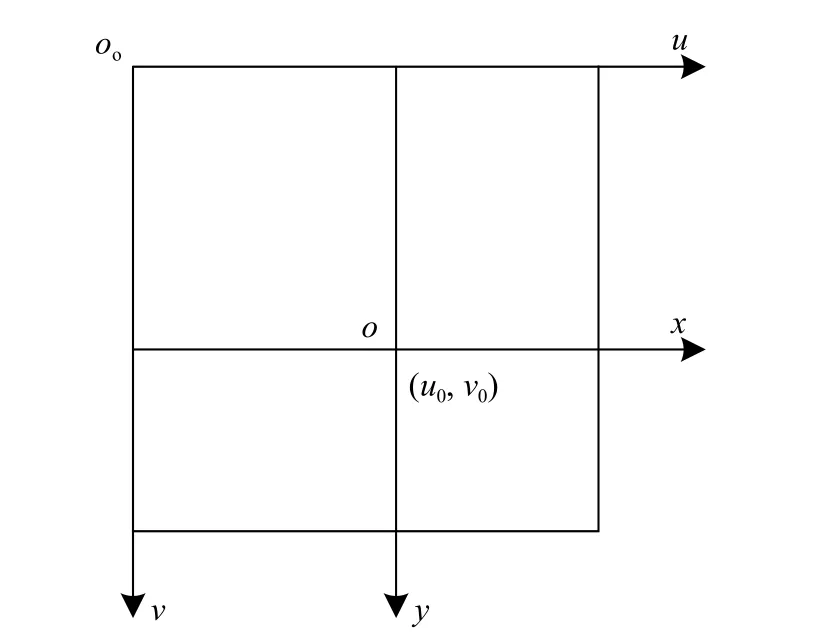
圖2 圖像坐標系Fig. 2 Image coordinate system

式中:dx,dy分別是CCD上u軸和v軸的尺寸因子;(u0, v0)是圖像中心點的坐標。將其表示為矩陣形式:
以光心O為原點,xc軸平行于x軸,yc軸平行于y軸,O、xc、yc構成攝像機坐標系。圖像物理坐標系轉化為攝像機坐標系:
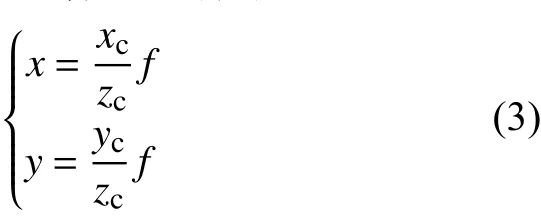
式中:f為攝像機鏡頭的焦距。可表示為矩陣形式:

由于物體和攝像機可以擺放在任意位置,需要在環境中選擇一個基準坐標系,用來描述攝像機以及空間中任意物體的位置,這個基準坐標系可以人為定義,稱之為世界坐標系。為了將世界坐標系中的點P轉換到攝像機坐標系中,引入旋轉矩陣R和平移向量t進行兩坐標系的轉換。
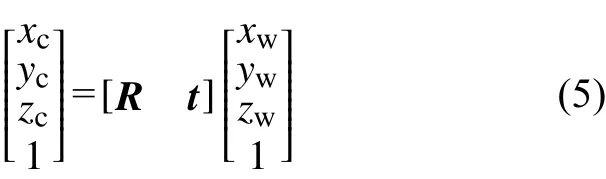
式中:R是3×3的旋轉矩陣,3個列向量均為單位向量,并相互正交;t是3×1的平移矩陣。
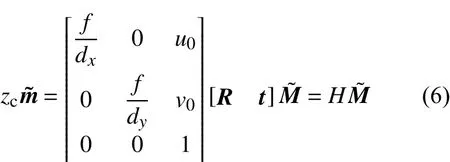
綜上,攝像機模型可簡寫為
1.2 非線性畸變校正
實際上,由于光學系統中鏡頭失真、鏡頭組的設計與組裝誤差造成像點位置偏移,針孔模型并不能完美地表達像點的真實位置[19-20]。線性模型描述的像點位置與實際像點的關系可以表示為

式中:δx、δy是像點在x、y方向的偏移量,與圖像點在圖像中的位置有關。理論上鏡頭同時存在徑向畸變和切向畸變,如圖3所示。
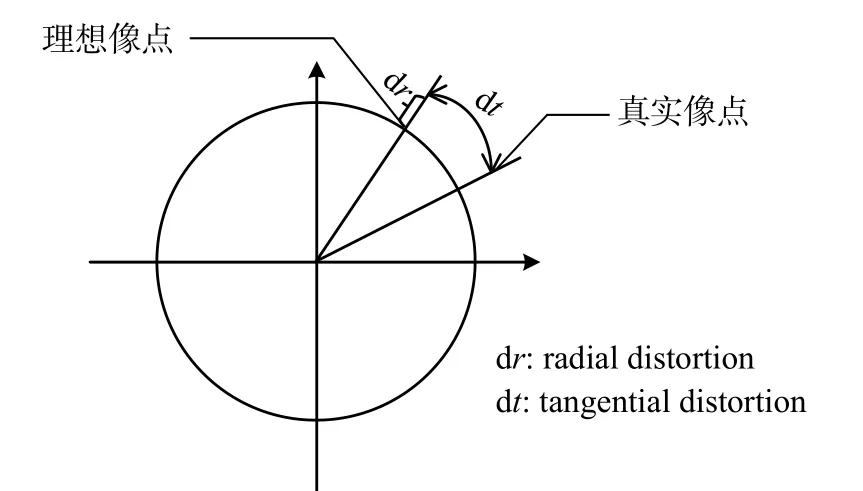
圖3 畸變模型Fig. 3 Distortion model
光線在遠離透鏡中心的地方比靠近中心的地方折射率更大,造成了視野總光軸中心區域的放大率不同于邊緣區域的放大率。透鏡不平行于圖像平面且透鏡組各個透鏡光軸不重合。由于攝像機工藝的發展,一般切向畸變比較小,主要考慮徑向畸變的修正量。同軸透鏡的徑向畸變量關于光軸嚴格對稱,故

2 實驗結果與分析
2.1 實驗過程
為了驗證針孔相機模型的可靠性和適用范圍,自行設計模板進行標定實驗,比較模板線段的實測長度與經過相機成像后測得的長度。實驗結果表明,在一定的物距范圍內,經過成像后的模板線段仍然具有很好的線性度,針孔模型可以適用。物距越小,標準誤差越大。這表明物距越小,對應的光學像差越大。
實驗的基本步驟如圖4所示。首先設計和制作待測模板,然后使用攝像機對多張模板依次進行拍攝,應用圖像處理的方法記錄模板各個位置處線段的長度。利用攝像機采集到的每張模板不同位置線段的成像數據,分析針孔模型的適用范圍和可靠性。設計的模板如圖5所示。
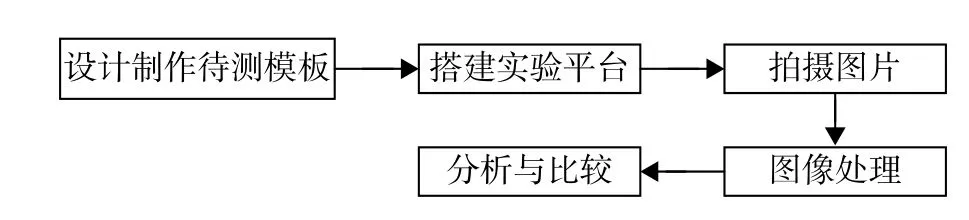
圖4 實驗過程Fig. 4 Experimental procedure
首先設計并制作21張待測模板,每個待測模板是使用Visio軟件繪制的21條長度漸變的平行線段,將其存入PowerPoint。以放映幻燈片的方式切換模板,不僅可以全屏顯示模板,而且可以減小更換模板帶來的誤差。鏡頭的光學像差是不可避免的,圖像不同位置處的光學像差不同。實驗為了觀察攝像機光學系統在不同物距和不同視場的成像線性度,需要分別比較兩種成像效果,即多張模板圖像中同一位置處的線段成像效果和單張模板圖像中不同位置處的線段成像效果。為了讓線段盡可能充滿整個成像傳感器,且避免線段排布緊密導致檢測受到干擾,需選擇合適的平行間距及線段長度。第一張模板中線段長度從上到下由90 mm依次遞減3.6 mm,至18 mm,其中每兩條線段間隔2 mm;第二張模板中兩兩線段間距不變,只是將最下面一條線段移到最上面的位置,上面的20條線段依次往下調整一格位置,以此類推,設計21個標定模板,使得每個位置都有相同的21組不同數據。
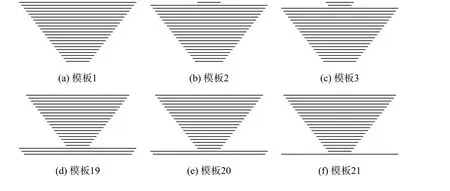
圖5 待測模板Fig. 5 Template for testing
系統實驗平臺的基本思路如圖6所示,在該圖基礎上選用MV-VEM200SM型號的黑白攝像機,分辨率為1 600 pixel×1 200 pixel。鏡頭為M3Z1228C-MP工業鏡頭。防震臺的一端放置攝像機,電子屏幕固定于一維導軌上。定義模板平面在世界坐標系中z=0,將三維空間中線段的測量轉換為平面線段測量,不需要計算三維坐標,減少計算量。利用精度為0.01 mm的游標卡尺進行目標點在世界坐標系下的測量,記錄顯示屏上每條線段的實際長度。
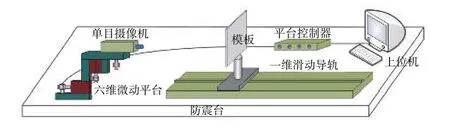
圖6 實驗系統平臺Fig. 6 Experiment platform
實驗首先要調整電子屏與攝像機平面平行,并且攝像機光心通過電子屏中心,在模板平面距離攝像機光心18~38 cm的條件下進行,每個位置拍攝21張模板圖像,輕觸顯示屏更換模板,
這樣可以減小實驗誤差。用電位移平臺使模板每次移動1 cm,并且保證焦距不變,同樣拍攝21張模板照片。拍攝20組模板照片,在Visual Studio 2015和OpenCV 3.3下編寫亞像素級角點檢測程序,獲得圖像模板上每條線段像素個數(單位:pixel)。
2.2 實驗結果與分析
第一組實驗將電子屏固定在距離攝像機光心18 cm處的位置,拍攝21張標定模板,然后使用亞像素級角點檢測方法,提取每個模板中最中間的第11條線段所占的像素個數,結果如表1所示。假設經過成像后線段的像素長度為y,模板線段實際長度為x,函數擬合結果如圖7所示。經過函數擬合,可以看出實驗系統成像效果滿足線性關系 y =0.070 8x?0.547,每個像素代表固定的實際長度。
由圖7可以看出,實驗中間線段經過攝像機成像后的像素長度具有優秀的線性擬合效果,也就是說攝像機在這種情況下滿足小孔成像。此線性模型參數及統計量如表2所示,線性回歸方程為y=p1x+p2,其中y代表實際長度(單位:mm),x代表像素長度(單位:pixel),系數p1表示一個像素對應的實際長度,p2為常數項,表示系統誤差如平臺搭建產生的誤差等。從表2可以得出,檢驗直線方程擬合程度的可決系數R2=0.999 97,其值越接近1,說明此方程的擬合程度越好。標準誤差項表示實際值與擬合估計值的總體偏差,用來衡量回歸方程的代表性,其值越小代表擬合效果越好。標準誤差計算公式為
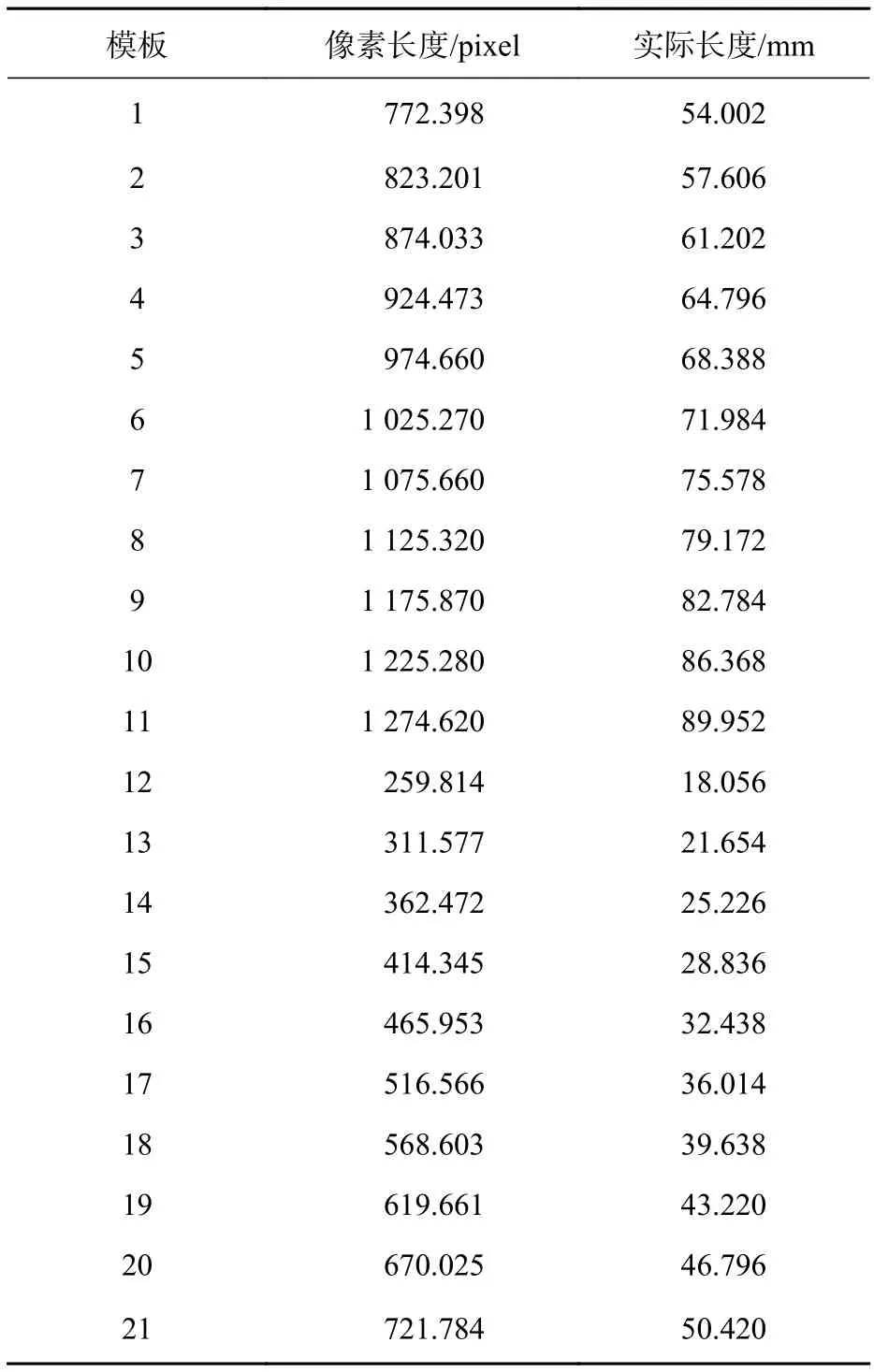
表1 第 11 條線段測量結果Tab. 1 Measurement results of Line 11
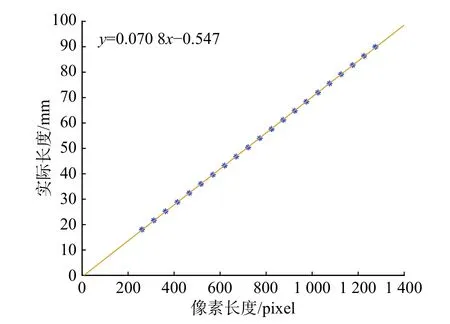
圖7 第 11 條線段測量結果Fig. 7 Measurement results of Line 11

表2 線性模型參數及統計量表Tab. 2 Linear model parameters and statistics
式中:n為樣本數;m為變量數;Se為剩余平方和。
由表2可以看出,標準誤差S較小,說明此線性模型假設合理,能夠很好地解釋圖像線段與物方實際線段的關系。用此線性模型隨機測量不同位置的幾條線段的數據,取上(第1條線)、中(第11條線)、下(第21條線)3個位置的線段測量數據。實驗結果表明,絕對誤差不超過0.26 mm,相對誤差不超過0.28%,實驗結果如表3所示。
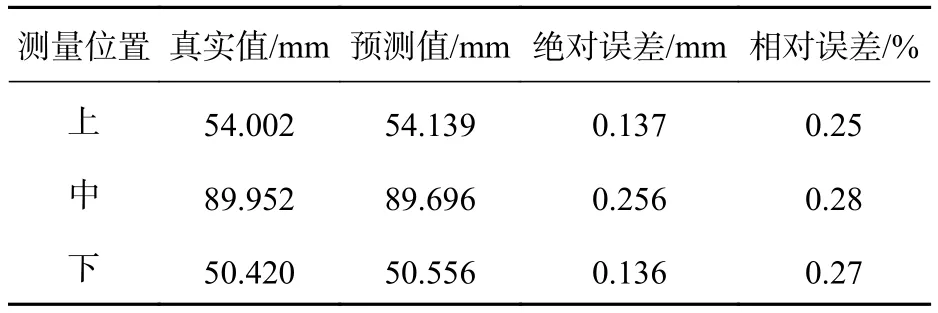
表3 模型測量結果Tab. 3 Measurement results of model
為了進一步比較、確定模板中間還是邊緣的光學像差會影響成像的線性度,采用同樣的方法研究物距30 cm處模板中其他位置的線段,得到的標準誤差隨線段位置的變化如圖8所示。由圖8可以進一步得出,成像線性度主要受邊緣圖像的畸變影響,中間部分的線段標準誤差小,說明中間部分畸變較小,邊緣部分的線段標準誤差大,說明邊緣部分畸變較大。進一步可以得出視場越大,畸變越大。
在實際測量中,難免會產生誤差。誤差包括拍攝時光照不均、手動測量誤差、圖像特征提取誤差等,實驗中此線性模型測量的相對誤差不超過0.28%,非常接近真實值,說明其可信度很高且具有實用價值,但其絕對誤差達到0.26 mm級別,可見在測量精度要求較高的場合下需要進一步改進。
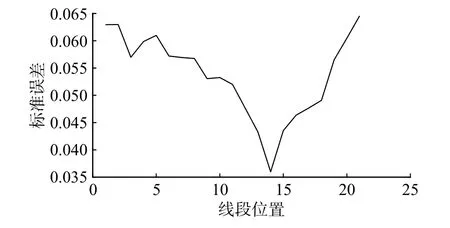
圖8 標準誤差比較Fig. 8 Comparison of the standard error
在電子屏幕距離攝像機平面18~38 cm處進行重復實驗,選擇每組物距下的第8張圖片進行數據分析,部分測量結果如表4所示。其中標準誤差為各距離下對實驗數據進行線性擬合后的結果,同時利用擬合的線性模型對模板中上、中、下3個位置的線段(第1條,第11條,第21條)長度進行預測,與實際值對比后計算其相對誤差。

表4 不同距離下模型測量結果Tab. 4 Measurement results of model at different distances
模型標準誤差隨物距的變化如圖9所示,可以推測,攝像機系統成像的線性程度與物距有一定關系。且物距越小,標準誤差越大,說明線性模型的擬合程度相對較差,也就是對應的光學像差大,圖像畸變大。此線性模型在遠距離時測量結果更加穩定,然而隨著物距的增大,可能會應用大焦距去拍攝遠距離物體,此時帶來的結果就是犧牲圖像畫質,誤差也會相對增加。因此在實際應用中,應平衡各因素的影響,選擇焦距合適的鏡頭,選擇最佳的物距。
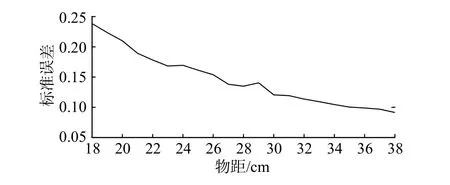
圖9 物距與標準誤差的關系Fig. 9 Relationship between object distance and standard error
3 結 論
視覺測量以攝像機模型為基礎完成后續測量任務,復雜的攝像機系統是否可以看作線性模型有待考證。本文通過搭建單目視覺系統進行了重復性測量實驗,20組實驗結果表明在該實驗條件下攝像機成像的線性度高,使用攝像機基本模型——線性模型進行計算機視覺任務是有效可行的。實驗方法中使用多組線段構成的模板組,其特征提取過程簡便且提取結果精度高。實驗不僅為針孔線性模型的使用提供了依據,同時由于實驗方法避免了復雜的模型運算,計算簡單,在本實驗條件下線性模型測量的相對誤差不超過1%,近距離測量時測量誤差不超過0.3 mm,因此在有特定精度要求的應用場合可直接用于平面測量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52