多波束聯合遙控水下機器人在高土石壩水下檢測中的應用
2019-04-26 12:09:32朱偉璽
水利水電快報 2019年4期
朱偉璽,馬 俊
(華能瀾滄江水電股份有限公司糯扎渡電廠,云南 普洱 665008)
鑒于水下環境的復雜性、檢測區域范圍大等因素,目前,高土石壩壩前淤積、壩后沖淤和水下壩面等的水下檢測主要采用傳統的蛙人水下檢測技術。但該技術受下潛時間和深度的限制,且人員生命危險面臨巨大考驗。單一的多波束探測系統只能對大范圍的檢測區域進行掃描,采用條帶狀水深圖,全面了解探測區水下地形情況,但無法準確、直觀地判斷待測對象的量化指標,因此需要聯合遙控水下機器人的高精度局部探測功能對重點區域進行掃描,從而得到較為準確的水下檢測狀況[1]。
與傳統蛙人水下檢測技術相比,多波束聯合遙控水下機器人技術可發揮兩種技術的優點,快速、連續、全方位和多角度地獲取采集數據,準確真實地描述高土石壩壩前淤積、壩后沖淤和水下壩面等異常情況,從而彌補傳統水下檢測技術的弊端,克服水下復雜環境的限制,為衡量缺陷等級和制定缺陷修復計劃提供重要基礎數據[2]。
1 多波束探測系統工作原理
多波束探測系統主要利用發射換能器陣列向海底發射寬扇區覆蓋的聲波,利用接收換能器陣列對聲波進行窄波束接收,通過發射、接收扇區指向的正交性形成對水下地形的照射交叉區域稱為腳印,根據聲波到達時間或相位即可測量出對應點的水下被測點水深值,若干個測量周期組合形成帶狀水深圖(見圖1),從而描繪出水下地形的三維特征。
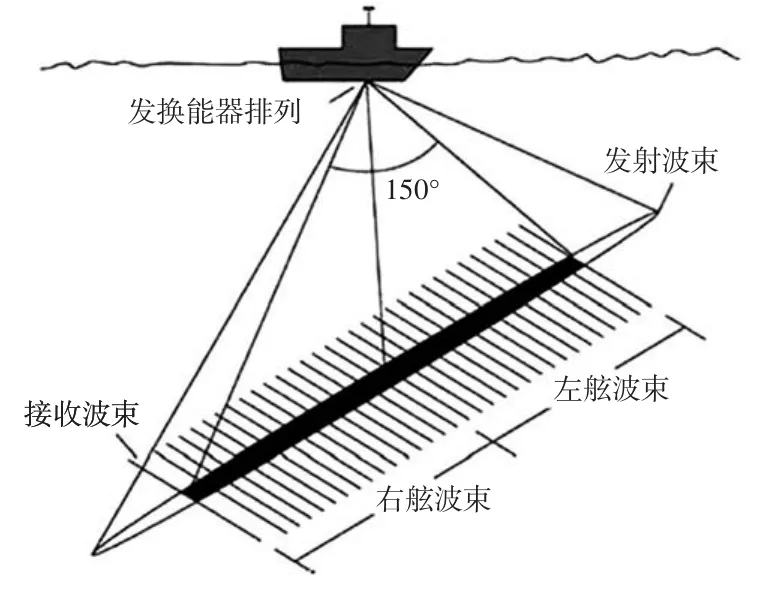
圖1 多波束探測系統工作原理示意
該系統主要部件包括3個子系統(見圖2):①多波束聲學子系統(發射接收換能器陣和信號控制處理電子系統);②輔助設備(衛星定位系統、姿態傳感器、驗潮儀和聲速剖面儀等);③數據后處理軟件(典型如Hypack)及相關軟件和數據顯示、輸出、儲存設備[3]。
2 遙控水下機器人系統工作原理
遙控水下機器人是一種由水面遙控結合水下作業的綜合系統,可在水下攝像、水下空間數據采集和聲吶回傳,按工作模式可將水下機器人分為2種:有纜水下機器人(ROV)和和無纜水下機器人(AUV)。從檢測費用、時間和區域等角度考慮,在水庫大壩水下檢測中一般采用有纜水下機器人,該系統主要由ROV主機、地面控制系統、絞盤管理系統3個部分組成,主要通過臍帶纜(通氣管、電纜線、信號線等)完成供電和功能控制,具有作業時間長、控制可靠、動作靈活等優點,適用于開展負載的水下作業任務[4]。水下機器人系統工作原理和組成部件見圖3~4。
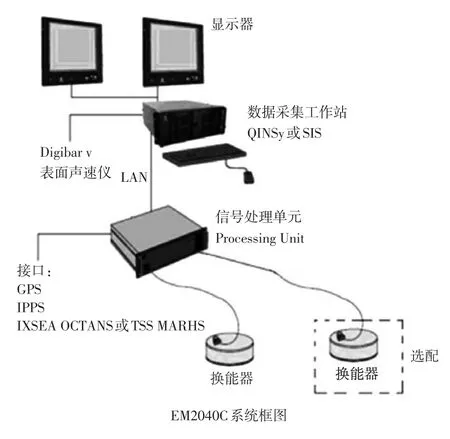
圖2 多波束探測系統子系統

圖3 水下機器人系統工作原理示意
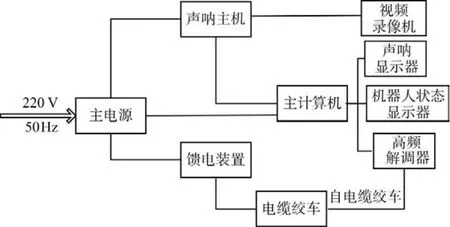
圖4 水下機器人系統組成部件
3 多波束探測系統精度評估
多波束探測系統引起誤差的主要因素包括多波束換能器量程和多波束輔助傳感器(姿態測量、聲速測量及GPS測量)。根據各種因素可將精度評估分為3類[5]:
(1)靜態探測精度評估。反映系統深度重復測量精度,用來評價聲吶測深系統的水深測量精度,但無法暴露整個系統各誤差源引起的水深和位置誤差,是有限項誤差評估的方法。
(2)相對探測精度評估。對系統自身的測量數據進行精度評估,由于系統的一些傳感器誤差對測量水深的影響自中央波束向邊緣波束增加,使中央波束精度明顯高于邊緣波束精度,該精度反映出影響波束水深精度各因素綜合誤差。
(3)絕對探測精度評估。由于多波束測深系統采用了波束開角小于3°窄波束技術,其中央波束的精度應高于單波束測深精度,在技術上不能采用由單波束系統來檢驗多波束系統的方法。絕對精度評估方法是對多波束測深系統的系統偏差和外側波束的精度進行分析和評估。
4 聯合探測技術
多波束探測系統能夠提供大范圍內高精度的水下地形數據,可全面探查水底地形的起伏情況,但無法準確、直觀地發現異常區域。遙控水下機器人可近距離地提供水下局部情況的真實照片,但無法全面高效地了解整個探測區域的水下復雜環境,水下作業存在高風險及盲目性。因此可發揮兩種系統各自的優勢,采用多波束探測系統的面積普查和遙控水下機器人的局部詳查相結合的方式進行水下探測。待水下缺陷區域確定后,可采用多波束探測系統對重點部位進行精細化掃描,實現大壩水下隱患的定性和定量描述,可為評判建筑物缺陷等級和制定修復計劃提供重要基礎數據。
5 應用實例
運用Sonic2024多波束探測系統和Seamor 600F 2/4遙控水下機器人系統于2016年7月10日至12月11日、2018年5月9日至11月30日,對大壩水面以下部分進行4期三維激光掃描觀測(見表1)。分別選取枯水期和豐水期,第一期水位777.00 m,第二期水位812.00 m,第三期水位777.00 m,第四期水位812.00 m。
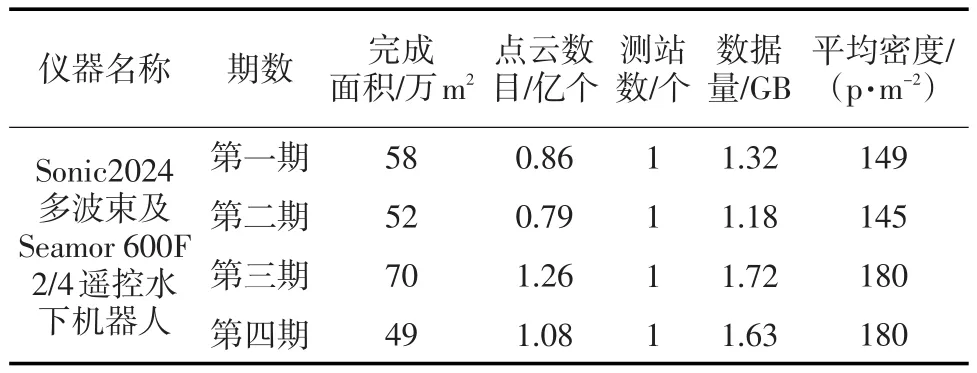
表1 大壩表面掃描點云數據采集統計
在水下探測過程中,需要遵循以下原則:
(1)最大水深時波束開角20°,單測線點間距小于0.34 m,波束開角隨測線移動適當增加,以確保足夠的重疊度。
(2)為了實時記錄船只的位置和運動姿態,將羅經的數據輸出到實時采集系統中,對羅經進行緯度設置、網絡設置和輸出設置等。
(3)采集兩個以上控制點進行坐標轉換,檢查流動站測量精度后,將流動站接收機與多波束測深系統相連,使多波束獲取的坐標與工程坐標相一致。
(4)在后期數據處理過程中進行必要的姿態改正,包括時延的校正、橫搖校正、縱搖校正、艏搖校正等,分別選擇平坦的水下地形區域以及有起伏的區域,進行重復多次往返測量。
(5)根據系統水下探測結果進行精度驗證和誤差改正。
5.1 點云數據獲取和數據處理
在水下探測過程中,以離測區最近的變形觀測基點(DB-JQR-JD01S觀測房頂基點)作為RTK工作基點,實際采集測線與設計一致,平均測線間距20 m,共布設7條測線,測線間覆蓋率≥60%。水下數據的采集過程中,嚴格控制船速和航線,以保證水下多波束數據滿足設計精度要求。
如圖5所示,選取7條水面測線,平均間距20 m,單個掃描點間距為50 cm;選取左右壩肩兩個基點(DB-JQR-JD01S、DB-JQR-JD02S)、上 游 壩 面(DB-TP08-11)一個基點共計3個點作為觀測基準點。根據既定的探測路徑依次探測水下待測區域獲取初始點云數據,并經過噪點剔除、點云配準、數據過濾、數據分類和抽稀等數據預處理過程后,得到水下區域整體結構化點云數據,進而構建水下待測區域三維模型。
壩體測量點云數據4期掃描平均密度約為164 p/m2,折算后掃描點的間距約50 cm,經過相關數據處理分析后,有效的數據量約為5 600萬點,構建模型分辨率為6 cm。
經過4期多波束掃描和水下機器人探測可知,獲取點云數據需經過去燥、濾波和粗差處理后形成平滑的第一、二期基礎點云數據(見圖6)。對于右泄的重點部位結合開挖輪廓圖和掃描點云數據進行二次建模重點分析(見圖7)。為了整體分析壩前庫底的探測狀況及其形成原因,可將水下掃描建模部分和大壩整體模型構建成整體可與竣工模型進行對比分析(見圖8)。對于右泄入口處需用水下機器人進行重點探測,探測混凝土的破損情況,為后期做進一步結構分析提供數據支撐(見圖9)。
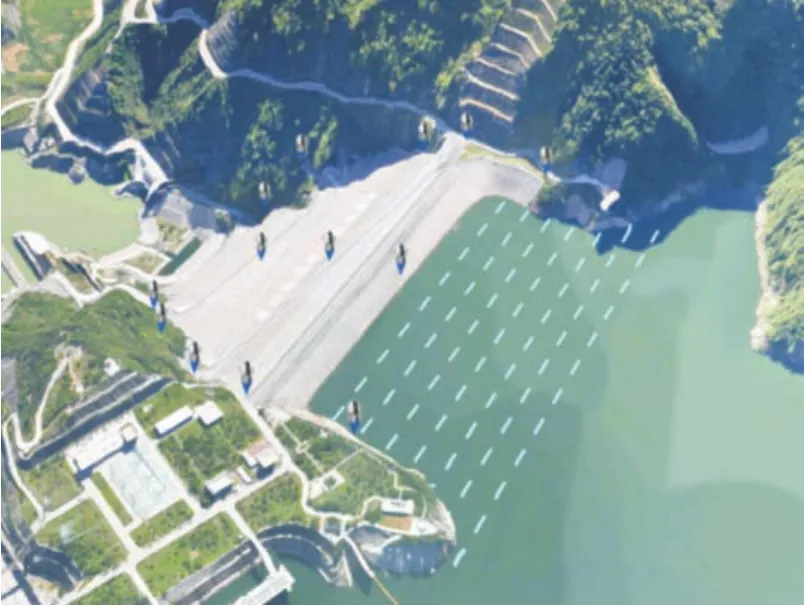
圖5 大壩水下區域探測路徑
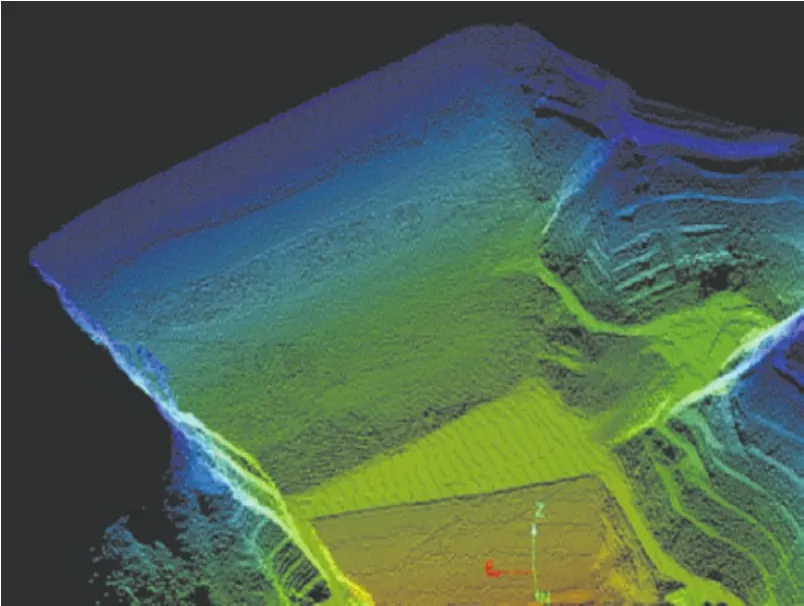
圖6 第一、二期迎水面多波束點云
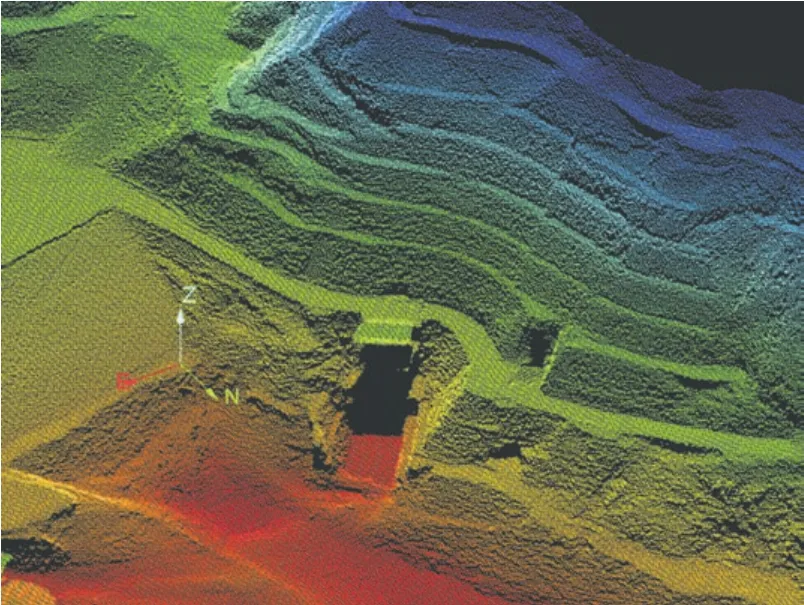
圖7 第三、四期右岸泄洪洞多波束點云
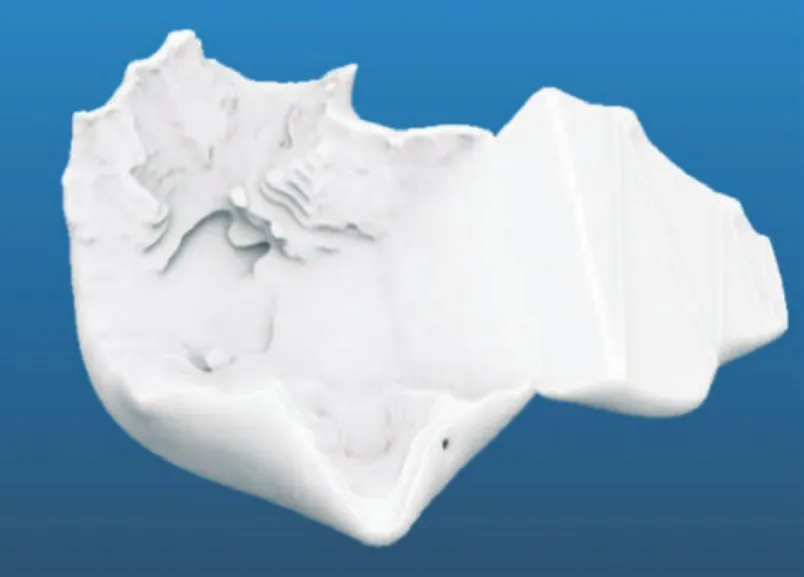
圖8 整體壩區三維重建示意

圖9 水下機器人探測混凝土結構麻面
根據4期測量數據對比分析可知:
(1)大壩壩前水下部分淤積層普遍較薄,其厚度小于80 cm,但在右壩肩部分有小范圍的淘蝕現象,在壩段樁號0+80 m、左岸1、2號導流洞進口兩處有少量集中淤積現象,淤積總量約為496 m3。
(2)在左右岸泄洪洞進水口處有少量混凝土出現麻面現象,破損總面積為0.76 m2,不影響泄洪洞的整體結構穩定性。
5.2 數據精度分析
水下多波束掃描系統的精度主要由RTK測量精度、慣導精度和測距精度確定。
(1)RTK測量精度。RTK基站架設于DB-JQR-JD01S觀測房頂部基點,Trimble R7 GNSS系統的測量精度為平面±2 cm,高程±3 cm。
(2)慣性導航系統。慣性導航系統本身并不參與測量,主要用于糾正多波束測深系統在測量過程中的行船姿態,進而實時改正觀測數據,因此慣性導航系統的精度與測量深度有很大關系。本次作業過程中,水下最低點約為高程600 m,最高點約為高程777 m,最大水深約為180 m,在該深度條件下,慣性導航系統精度約為±(2~3)cm。
(3)聲納精度。多波束聲納精度和慣性導航系統精度類似,主要取決于測量水深,在該深度條件下,聲納精度約為±(2~3)cm。
綜上所述,在各類誤差的影響下,經過精確計算和數據分析可知,水下多波束測深點云數據的精度≤10 cm。
6 結論與展望
聯合檢測系統可充分發揮多波束探測系統和遙控水下機器人系統的優勢,建立了一套用于高土石壩水下檢測的聯合技術方案,實現水下近距離、高精度的定量化掃描測量,準確真實地描述高土石壩壩前淤積、壩后沖淤和水下壩面等異常情況,從而彌補了傳統水下檢測技術的弊端,克服了水下復雜環境的限制,為衡量缺陷等級和制定缺陷修復計劃提供重要基礎數據。
該聯合水下檢測系統在軍事領域,海洋領域的運用將有更大的優勢,也可為壩前水下攔污柵的檢查、消力池水下檢查提供借鑒。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
