基于多旋翼無人機的城市智能交通系統研究與發展
2019-04-29 06:29:20
福建質量管理 2019年9期
(重慶交通大學 重慶 400000)
引言
隨著世界經濟飛速發展,城市交通網絡建設已經成熟,交通擁擠、交通事故以及交通基礎設施趨于老舊化成為各國大中小城市的普遍問題。根據相關部門統計,英國司機年交通擁堵成本超過377億英鎊(約合523億美元),平均每名司機的年擁堵成本達1168英鎊(約合1621美元)。據統計,我國靜態交通問題帶來的經濟損失已占城市人口可支配收入的20%,相當于GDP損失5-8%[1]。由于城市交通擁擠經濟損失嚴重,構建智能城市交通體系已步入快車道,利用多旋翼無人機進行交通管理信息采集成為關鍵點之一。傳統交通監管系統是利用傳感器、攝像頭等固定硬件進行交通數據定點分析,最后匯聚為區域信息,由于數據傳輸存在延遲,無法從廣角了解具體交通路況信息,因此,無人機信息采集成為新途徑。
2002年起,美國、德國、瑞典等國家的相關機構先后展開了無人機在交通領域的應用研究;2010年前后,西班牙、俄羅斯和韓國也加入了該領域研究行列。國內起步較晚,從2011年前后至今,主要有中國人民解放軍理工大學、北京航空航天大學、同濟大學和上海天交通大學等高校在開展相關研究[2],但以大疆公司、北京維思韋爾航空電子技術有限公司等帶頭的相關企業如雨后春筍般涌現出來。在這些年間,中國度過了從效仿國外無人機到自主研發無人機再到出口無人機的過程,而由于無人機的各類優勢,中國及其重視其發展,并將發展相關技術列入863計劃中(無人機發展概覽),而利用無人機進行實時信息采集結合大數據處理具有極大的潛力,但同時也面臨諸多挑戰。
文章對多旋翼無人機發展歷程進行介紹,分析利用構建基于多旋翼無人機的道路交通監管系統的優勢以及挑戰,并展望未來發展趨勢。
一、多旋翼無人機發展史
距今,多旋翼無人機發展已經有100多年的歷史。1907年,法國飛機設計師Louis Breguet所制造的Breguet-Richet Gyroplane是第一架能夠垂直上下懸降的載人四軸旋翼機,雖然當時極限飛行高度僅有0.6m至1m,極限飛行時間14分鐘,但這是人類第一次嘗試此構型。由于技術受限,直到20世紀中葉,一種能夠實現上下懸降、上下飛行的四旋翼直升機才被設計出來。隨著MEMS技術、微型芯片、微傳感器處理技術的發展,小型多旋翼無人機才逐漸繁榮,得以復興。
如今,多旋翼無人機發展迅速,廣泛應用使它在人工智能和虛擬現實為主的當下占得一席之位。2016年的國際消費類電子產品展覽會(CES)上,無人機成為了最搶眼的品類之一,參展企業有27家,而在早年,參展企業僅為個位數[3]。多旋翼無人機的諸多優點讓其在各個行業以及領域中飽受好評,其民用領域最為突出:
農業植保中,我國農藥發展一直以高效、低毒、低殘留為目標,而利用多旋翼無人機噴灑液態化學農藥噴霧、植物生長劑以及肥料等農藥則使工作人員不予農藥直接接觸,提高人員安全。2016年,新華社全文播發了《中共中央國務院關于落實發展新理念加快農業現代化實現全面小康目標的若干意見》,其中聚焦三農,加大政府補貼力度,再一次推動多旋翼無人機在其中的應用。
電力應用中,多旋翼無人機可代替人力,利用高分辨路攝像頭以及紅外線檢測裝置對長期鋪設在外的輸電線路進行巡檢,檢查其是否有倒塔、斷股、磨損、腐蝕等損傷。同時在電力工程前期的土石方及基礎建設、組塔和架線三階段中,多旋翼無人機遙感測繪技術可優化路線,確定最佳建設位置,以及周圍環境等因素,大大彌補了人力短板。
遙感測繪中,高分辨率、針對性強、方便靈活等因素使得基于無人機的高分辨率對地觀測航空遙感系統成為目前行業內的新方向。傾斜攝像技術、遙感圖像拼接技術以及基于無人機影像的三維重建技術正推動者遙感測繪行業步入新的時代。
工業檢查中,油氣管道巡檢、風力發電機巡檢查、鐵路巡檢、太陽能發電系統巡檢、橋梁巡檢等應用讓工業檢查更趨于高效化、全面化、智能化以及安全化。
當然,在交通管理中,多旋翼無人機的啟用為執法人員提供更廣闊的視野以及更高效的執法,下文將重點分析。
二、城市智能交通系統
智能交通系統(Intelligent Transportation System,ITS)是以云計算、物聯網、大數據等先進信息技術為支撐,電子自動控制技術與傳感器檢測技術有機結合[4],以人、車、路三級數據共享為核心,打造實時、準確、高效的信息庫,搭建智能化、信息化、可控化的地面交通運輸系統,建立大范圍、全方位的數據共享模式的現代交通系統模型,利用先進技術達到路況透明化、行車智能化等目的。
20世紀60年代以來,因道路堵塞、環境污染、交通事故等產生的負面影響日趨明顯,逐漸成為牽制國家經濟發展的重點問題之一。信息革命時代所帶來的相關信息技術被各國交通業界吸收,并經過一段時間的研究與醞釀,智能交通系統(Intelligent Transportation System,簡稱ITS;原為“IVHS——智能車輛道路系統”)的概念正式步入人們視線,智能交通系統正式開始大規模應用。
(一)國外ITS發展情況——以美國、歐盟為例
1.美國
美國是最早開始智能交通系統研究的國家。20世紀60年代末,美國運輸部聯合通用汽車公司共同研發電子路徑導向系統,其中包括車載顯示器、路旁單元、車載設備和路旁單元的雙向通訊等功能,開創了美國智能交通系統的先河。
20世紀70年代末,第一顆全球定位系統(Global Position System,GPS)由美國發射,同期的數字地圖汽車導航器、電子拍照等產品為日后美國智能交通系統發展打下扎實的基礎。
20世紀末,美國正式頒布《國家智能交通系統項目規劃》(National ITS Program Plan),確定了美國智能交通系統所具備的7大領域與30個公戶服務功能[5],如表1美國智能交通系統網絡基本構成所示。
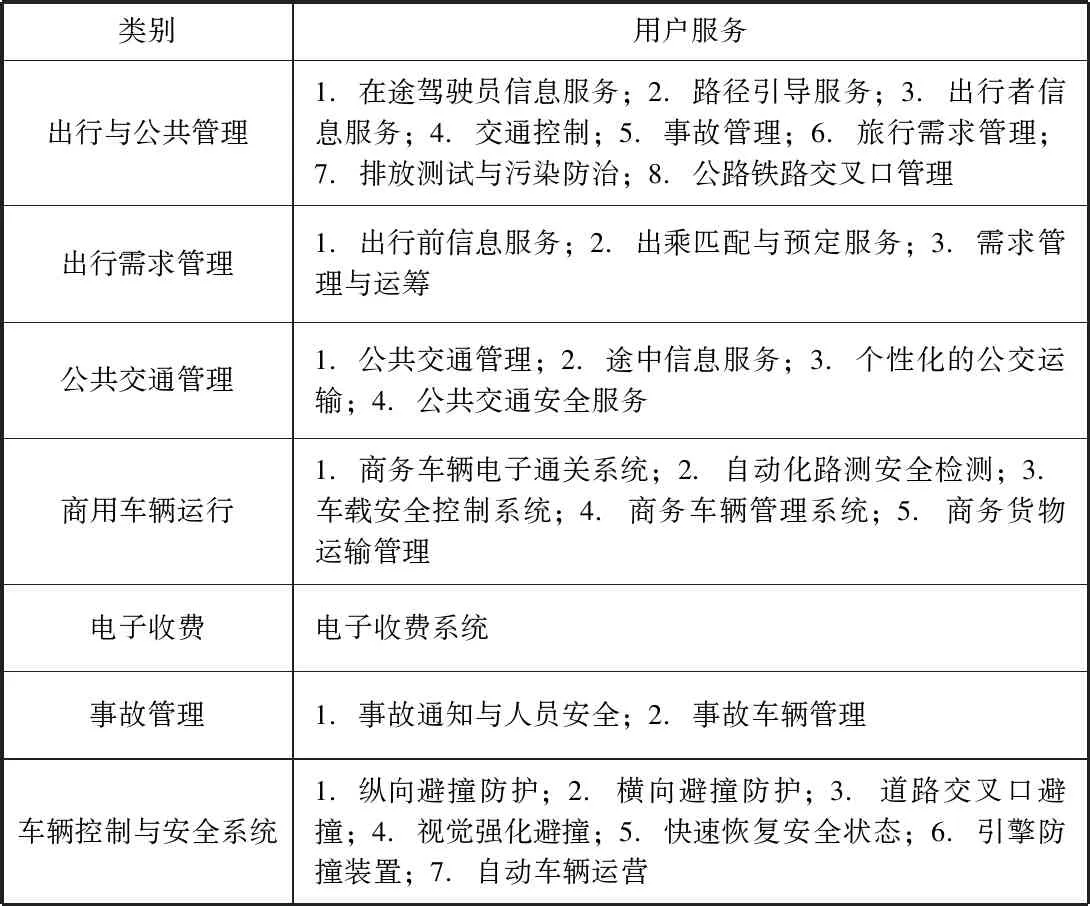
表1 美國智能交通系統網絡基本構成
近幾年,美國智能交通系統的建設重點主要圍繞車路協同系統(Vehicle Infrastructure Integration,VII)其中包括增強型數字地圖(EDMap)、智能車輛先導(IVI)、車輛安全通信(VSC)、交叉口協作避碰(CICAS)內容。同時,美國通訊委員會專門分配5.9GHz專用短程通信(DSRC)頻段用于此項目,并在加州、密歇根州與亞利桑那州等地區重點開展建設。
2.歐盟
自從1969年歐盟前身——歐共體委員會提出開展各成員國之間交通控制電子技術演示,只到1985年,歐盟的ITS才正式開始發展,各成員國一同成立了歐洲智能交通協會(ERTICO),統一領導規劃實施智能交通系統相關工作。由于歐盟ITS發展必須考慮多個成員國的具體情況,其發展重點則在于標準化、信息交換與整合,唯有通過統一的標準化協議才能使ITS在歐盟中得以發展。
現目前,歐盟智能交通系統建設主要圍繞4個方面:安全性(Safe Mobility)、合作性(Cooperative Mobility)、生態流動性(Eco Mobility)以及信息流動性(Info Mobility)。
(二)國內ITS發展情況
中國ITS研究起步于20世紀70年代末,ITS概念剛剛從美國、日本等發達國家引入中國,且由于國家經濟還處于恢復期,城市機動車需求量低,交通問題還未惡化,直到20世紀90年代末,中國經濟快速發展,城市交通落后弊端凸顯出來,ITS才之間被國家以及政府重視,并開始研究相關技術。
中國ITS發展主要分為四個階段:探索階段、初步發展階段、加速發展階段以及移動互聯網新階段,如圖表2中國ITS發展各階段及內容所示。
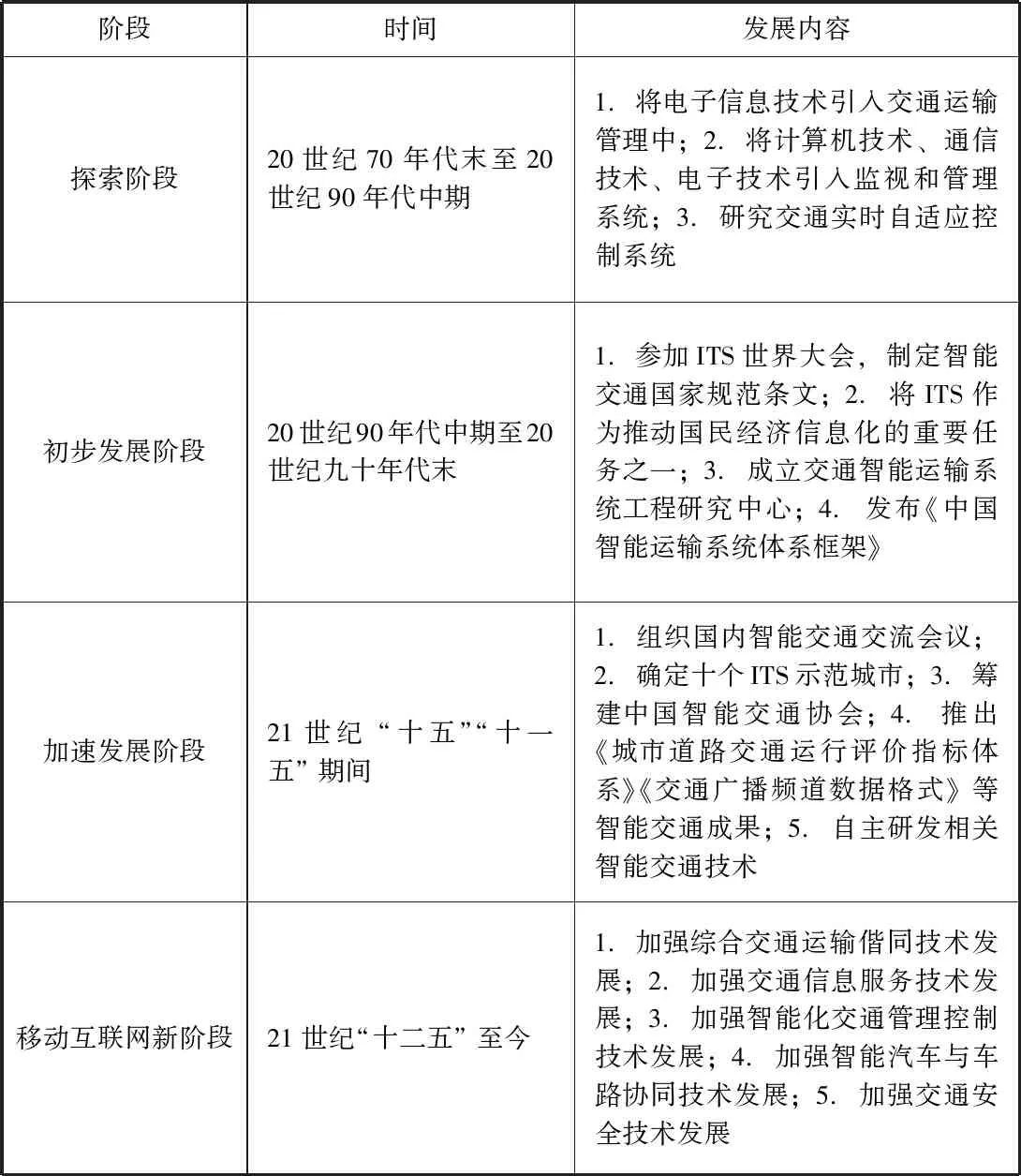
表2 中國ITS發展各階段及內容
現階段,我國ITS應用主要分為6個方面:交通管理系統、交通信息系統、車輛控制系統、公共交通系統、電子收費系統以及實時監控系統。其中前三個方面成為我國ITS的強項。
三、多旋翼無人機在ITS中的應用研究
2002年,作為第一個將多旋翼無人機引入交通監管的國家,美國相關部門開展一個項目,深入研究多旋翼無人機數據采集技術的可行性。結果表明:利用無人機進行交通數據采集可降低20%的總成本,每年可節省7500萬美元左右的費用,且加裝擴展裝備可客觀展現實時路況以及交通事故,從被動向主動轉變。
隨后,多旋翼無人機在交通監管中的應用越來越多,結合ITS的無人機交通監管模式也逐漸體現優勢。
(一)無人機系統
無人機系統(Unmanned Aircraft System,UAS)是指由飛行器系統、地面保障系統、通信鏈路系統以及載荷系統四大系統組成,對無人機進行監控、支援、信息傳輸、維護等功能為一體的系統。四大系統及其作用如圖1所示。

圖1 無人機系統
四大系統相輔相成,才能構建一架能夠自主控制、擁有后備支援的無人機,而將多旋翼無人機與ITS相結合,四大系統有效集成才能實現。
1.動力系統
由于多旋翼無人機在執行任務時要求靈活,可操控性高,且具有相對較長的續航時間,動力系統決定了無人機的結構以及重量、體積。
傳統多旋翼無人機多采用鋰聚合物電池作為主要飛行動力,自重2~5kg,最長續航時間不超過40min,但充電池時間超過1h。由于鋰電池相關技術已無法取得突破,即使使用高能鋰電池,續航時間不超過1.5好,且增加自重,約束空中靈活性。
隨著新能源的開發,目前無人機載電池得到了進一步突破。2015年5月,新加坡公司研發的搭載氫燃料電池的多旋翼無人機,可空載續航4h,1kg滿載飛行150min,相對于鋰聚合物電池,續航時間大大延長,且氫燃料電池安全性更高,更換燃料方便,更符合現對多旋翼無人機的要求[6]。
為了更好與ITS有機結合,現目前市場上存在電池智能系統,該系統可實時顯示電池電壓、電量剩余百分比、電池溫度、電池休眠保護、電池狀態等電池參數,在進行無人機遠程操控時,可更好地了解無人機狀態,實時準備召回。
2.數據鏈系統
不同與軍用固定翼無人機以及大型民用無人機,多旋翼無人機多進行周期短、無基站或遠程指揮中心、利用短距離無線局域網協議進行現場視距數據采集的工作,所以對于數據鏈要求不高,Zigbee 組網或WIFI傳輸協議已能滿足大部分需求。在ITS中,建立智能化、信息化、可控化的地面交通運輸系統,需要的是能夠實時傳遞數據的“天眼”,比起固定的監控攝像頭和道路傳感器,多旋翼無人機顯然能夠擔起重任。如圖2所示,將ITS指揮中心設為地面基站與網絡中心,利用超視距數據鏈進行數傳、圖傳的實時進行,在未來信號范圍問題得到改善或解決,遠程指揮中心作為多旋翼無人機基地,進行無人機遠程派遣與回收,能夠更進一步減少人力成本。

圖2 數據傳輸鏈
3.有效載荷
有效載荷是無人機完成各項工作所需要的功能模塊,可以說無人機是搭載各類功能模塊的飛行平臺,只有搭載有效載荷,無人機才能發揮最大的作用,如表格 4數據傳輸鏈中的光學設備、通信設備以及傳感器設備。
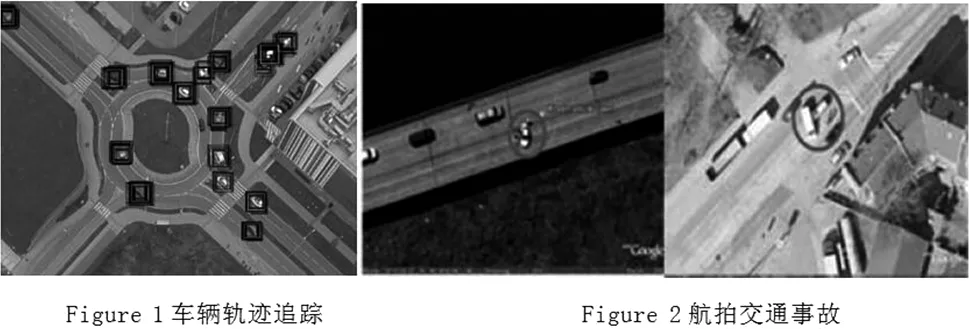
最常見的有效載荷是光學照相機為首的光學設備,搭載光學設備進行航拍、圖片采集也是多旋翼無人機最常見也是最重要的工作之一。當然,在交通管理中,普通光學設備已無法滿足需求,紅外線、熱敏設備以及特種設備成了有效載荷的新產品,利用這些載荷,多旋翼無人機可完成遠程喊話、事故航拍、追蹤軌跡等操作,如Figure 1車輛軌跡追蹤 Figure 2航拍交通事故所示[2]。
四、未來發展趨勢
就目前發展速度而言,5G網絡已經開始普及,多旋翼無人機會在不久后正式加入大數據采集隊伍之中。而無人機技術也朝著高機動、長續航、自主飛控、智能感知等方向發展,現今的“互聯網+”必將帶來“無人機+”的專業領域研究。
攻克動力、數據傳輸等難關后,將多旋翼無人機與人工智能進行結合,也必將帶來新一次的科技浪潮,無人機交警、智慧物流等技術也將逐漸成熟,真正的ITS將向我們逐漸靠攏。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中國核電(2021年3期)2021-08-13 08:56:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
華人時刊(2017年21期)2018-01-31 02:24:01
家庭影院技術(2017年9期)2017-09-26 03:41:45
