地震現(xiàn)場房屋裂縫寬度快速檢測1
2019-05-08 01:12:50吳建超蔡永建喬岳強(qiáng)
震災(zāi)防御技術(shù) 2019年1期
關(guān)鍵詞:區(qū)域
楊 鋼 吳建超 蔡永建 喬岳強(qiáng) 胡 慶 湯 勇
1)中國地震局地震研究所,中國地震局地震大地測量重點(diǎn)實(shí)驗(yàn)室,武漢 430071
2)武漢地震工程研究院有限公司,武漢 430071
引言
地震發(fā)生后,現(xiàn)場工作隊(duì)將對地震現(xiàn)場進(jìn)行災(zāi)害調(diào)查,房屋破壞等級評價是其中一項(xiàng)重要工作(喬岳強(qiáng)等,2014;吳建超等,2015,2016;蔡永建等,2015)。對于未倒塌、毀壞房屋,房屋裂縫寬窄是評價房屋破壞等級的重要依據(jù)。地震現(xiàn)場災(zāi)害調(diào)查工作量大,若人工測量房屋的每一處裂縫寬度,必然加大現(xiàn)場工作的難度。MATLAB圖像處理技術(shù)在橋梁裂縫檢測、建筑裂縫、混凝土結(jié)構(gòu)外觀檢測及邊坡監(jiān)測預(yù)報(bào)等方面均有應(yīng)用(Abdel-Qader等,2003;盧曉霞,2010;彭海濤,2011;馮洋,2013;肖鋒,2013;李文波等,2015)。因此,本文嘗試運(yùn)用MATLAB圖像處理技術(shù),快速、高效、準(zhǔn)確地獲取地震現(xiàn)場的房屋裂縫寬度數(shù)據(jù),以期為地震現(xiàn)場災(zāi)害調(diào)查工作提供技術(shù)支持。
1 房屋裂縫寬度檢測原理
地震現(xiàn)場的房屋裂縫多為線型或“X”型(圖1),在進(jìn)行視覺觀察后,選取目標(biāo)裂縫進(jìn)行測量。裂縫檢測的原理是在裂縫附近選取黑色正方形ABCD為人工標(biāo)志物,邊長x(mm),如圖2所示。
基于MATLAB圖像處理技術(shù),可計(jì)算出標(biāo)志物角點(diǎn)在拍攝圖像坐標(biāo)體系中的坐標(biāo)值,正方形4個角點(diǎn)坐標(biāo)分別為(X1,Y1)、(X2,Y2)、(X3,Y3)、(X4,Y4),則圖像中正方形的周長Lt為:

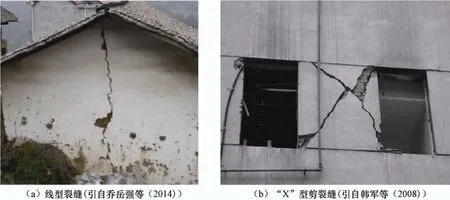
圖1 地震現(xiàn)場房屋裂縫特征 Fig.1 Cracks of buildings in earthquake field
圖像中裂縫的寬度Dt由裂縫邊緣M(XM,YM)、N(XN,YN)2點(diǎn)之間的歐氏距離計(jì)算所得:

圖中M、N點(diǎn)向量方向與裂縫延伸方向垂直。人工標(biāo)志正方形的實(shí)際周長為Ls=4x,單位mm,則裂縫實(shí)際寬度Ds為:

其中,Lt和Dt分別是以圖像中像素點(diǎn)數(shù)計(jì)算得到的長度和寬度,單位為像素個數(shù)(pix)。
2 基于圖像處理技術(shù)的裂縫檢測
在進(jìn)行地震現(xiàn)場災(zāi)害調(diào)查工作時,需對不同類型房屋損壞情況進(jìn)行快速評估,以確定調(diào)查點(diǎn)地震烈度,并繪制地震烈度圖。因此,進(jìn)行房屋損壞評估是地震烈度圖繪制的基礎(chǔ)工作之一。地震發(fā)生后,未坍塌房屋的承重墻體、構(gòu)造柱開裂的程度等是評判房屋損壞等級的重要依據(jù)(張敏政,2008;譚慧明等,2010;吳迪等,2010;中華人民共和國國家質(zhì)量監(jiān)督檢驗(yàn)檢疫總局等,2012)。
基于圖像處理技術(shù)檢測房屋墻體和構(gòu)造柱裂縫寬度,主要包括裂縫圖像采集、裂縫圖像處理、裂縫識別及裂縫寬度確定等,其工作流程如圖3所示。
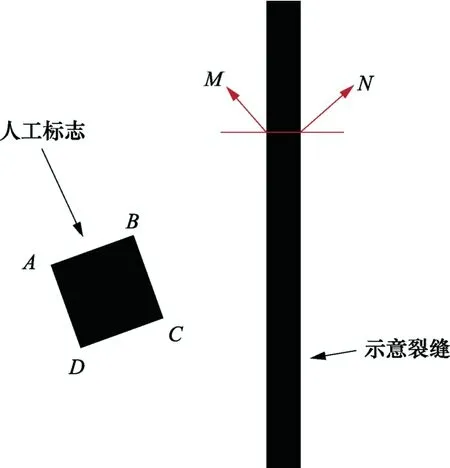
圖2 裂縫寬度測量原理 Fig.2 The principle of crack width measurement method

圖3 裂縫寬度測量實(shí)現(xiàn)流程 Fig.3 The process of the crack width measurement method
現(xiàn)場調(diào)查應(yīng)在保障安全的前提下,進(jìn)行房屋損壞評估工作;若地震現(xiàn)場存在余震,應(yīng)在余震結(jié)束后或余震不足以再次造成房屋破壞時,進(jìn)行房屋損壞評估。房屋裂縫寬度是房屋損壞等級評估的重要指標(biāo)。傳統(tǒng)的裂縫寬度測試是運(yùn)用塞尺法、裂縫顯微鏡法等對裂縫寬度進(jìn)行近距離人工識讀,這樣費(fèi)時、費(fèi)力、效率低,還可能存在人為誤差(肖鋒,2013)。
本文采用的房屋裂縫寬度測量方法,應(yīng)在地震后保障安全的前提下近距離進(jìn)行。在房屋裂縫左側(cè)附近,放置1個正方形人工標(biāo)志物,利用已有地震現(xiàn)場調(diào)查終端(手機(jī))進(jìn)行裂縫圖像采集,傳至計(jì)算機(jī),再利用MATLAB軟件進(jìn)行圖像處理分析(Gonzalez等,2009),獲得裂縫寬度的最大值。基于數(shù)字圖像處理技術(shù)的房屋裂縫測量能夠達(dá)到更高精度,且更加自動化、快速、便捷,并可消除人為讀數(shù)誤差。
2.1 設(shè)置標(biāo)志及選定觀測區(qū)域
在拍攝圖像時,對人工標(biāo)志有以下要求:①特征鮮明,能被計(jì)算機(jī)程序辨識,具有較強(qiáng)辨識精度和可靠性;②制作方便,能夠輕松完成制作;③標(biāo)志物尺寸合適(肖鋒,2013)。本文選取的人工標(biāo)志為正方形標(biāo)志物,其形狀規(guī)則,角點(diǎn)明顯,便于有效角點(diǎn)的提取;并且正方形標(biāo)志的色彩與其所處背景色差異明顯,能夠使數(shù)字圖像處理過程變得簡潔,便于增加圖像特征點(diǎn)的提取精度;正方形標(biāo)志制作簡單、布設(shè)容易。本文選取的標(biāo)志物為10mm×10mm的正方形,顏色為黑色(圖2),背景色為白色。
在裂縫附近設(shè)置觀測標(biāo)志物時,應(yīng)先對目標(biāo)裂縫全面觀察,在其上找到相對明顯、較為完整的開裂處作為裂縫目標(biāo)測量區(qū),然后在目標(biāo)測量區(qū)裂縫一側(cè)附近粘貼已制好的觀測標(biāo)志物,觀測標(biāo)志物應(yīng)盡量靠近裂縫邊緣。
2.2 圖像采集
為有效提高裂縫寬度辨識的精度和可靠性,應(yīng)采用高像素的拍攝設(shè)備。在計(jì)算機(jī)中,采集的圖像以數(shù)據(jù)點(diǎn)組成的矩陣進(jìn)行存儲,是量化的二維矩陣,每個數(shù)據(jù)點(diǎn)具有自身的屬性,如圖像的灰度、顏色等,這樣的數(shù)據(jù)點(diǎn)被稱為像素(李文波等,2015)。為了使裂縫寬度測量準(zhǔn)確度更高,拍攝圖像時,屏幕中的裂縫應(yīng)呈豎向,裂縫位于圖像中間,拍攝設(shè)備應(yīng)位于裂縫與觀測標(biāo)志物的正前方(馮洋,2013)。
若觀測區(qū)域存在多條裂縫,為計(jì)算簡潔,可以設(shè)置多個目標(biāo)觀測區(qū)域,每個目標(biāo)區(qū)域內(nèi)只允許出現(xiàn)1條裂縫(彭海濤,2011),對每個目標(biāo)區(qū)域內(nèi)裂縫寬度進(jìn)行計(jì)算,從而得到各條裂縫寬度值。
2.3 圖像灰度處理
圖像灰度處理過程是把RGB格式的圖像轉(zhuǎn)化為灰度圖,為后續(xù)圖像處理提供方便。由于相機(jī)采集到的裂縫圖存儲為RGB格式,包含了多樣色彩信息,三維的數(shù)據(jù)矩陣存儲由RGB格式圖像數(shù)據(jù)定義的紅、綠、藍(lán)3個像素顏色分量的數(shù)值(夏日誠,2007)。若對這種格式的圖像直接進(jìn)行處理,將顯著增大計(jì)算量,降低計(jì)算效率。同時,進(jìn)行簡化處理時應(yīng)確保裂縫寬度測量的精度。通過分析,將RGB圖轉(zhuǎn)化為灰度圖是達(dá)到以上目的最簡單的方法。
數(shù)字圖像可以定義為1個三維(或二維)函數(shù)f(x,y,n)(或f(x,y)),函數(shù)中x和y是空間坐標(biāo),n為坐標(biāo)(x,y)處的通道數(shù)。在任何空間坐標(biāo)(x,y)上的幅值f稱為該點(diǎn)圖像的灰度或強(qiáng)度(張強(qiáng)等,2012)。當(dāng)坐標(biāo)點(diǎn)(x,y)和幅值f為離散的、有限的數(shù)值時,稱該圖像為數(shù)字圖像。一幅M×N×n階圖像的矩陣可表示為:

若f(x,y)∈[0,255],n=3,圖像有3個通道(即紅色f(x,y,1)、綠色f(x,y,2)、藍(lán)色f(x,y,3)),為RGB色彩模式圖像。若f(x,y)∈[0,255],n=1,則為灰度圖像。當(dāng)f(x,y)=0,顯示為黑色;當(dāng)f(x,y)=255,顯示為白色;其它值均為由白色向黑色過渡的灰色。
將彩色圖像轉(zhuǎn)化為灰度圖像的方法很多,較為常用的3種轉(zhuǎn)化方法是基于RGB到Y(jié)UV加權(quán)轉(zhuǎn)換的方法(式(5))、權(quán)值平均法和基于RGB到HSI加權(quán)轉(zhuǎn)換的方法。采用式(5)的方法,能夠高效地將彩色圖像轉(zhuǎn)化為灰度圖像,并且圖像的灰度層次分明,不會對原圖造成較大的失真,因此,本文采用該方法獲得裂縫的灰度圖像。

其中,Gray為灰度圖中每個像素的灰度值,R、G、B分別為RGB圖像上像素紅色分量、綠色分量和藍(lán)色分量的數(shù)值,基于各彩色分量信號對轉(zhuǎn)換結(jié)果影響的大小決定各系數(shù)。采用式(5)計(jì)算,RGB格式的圖像進(jìn)行了大程度的簡化,原圖像中有用的信息也得到了保留。
2.4 圖像二值化
圖像二值化就是對裂縫灰度圖像選用1個合適的閾值,而后根據(jù)閾值判斷圖像中哪些像素點(diǎn)屬于背景區(qū)域、哪些屬于目標(biāo)裂縫區(qū)域,進(jìn)而產(chǎn)出相應(yīng)的裂縫特征更加顯著的二值黑白圖像。其中,黑色部分代表背景區(qū)域,白色部分代表目標(biāo)裂縫區(qū)域(羅希平等,1999;章毓晉,2001)。
圖像二值化的基本原理是假定圖像平滑后,對灰度圖的二維灰度函數(shù)f(x,y)進(jìn)行最佳閾值法(郭艷平等,2008)處理,找出1個合適的灰度值作為閾值T,然后根據(jù)閾值T將圖像分割為2部分,從而實(shí)現(xiàn)圖像二值分割。函數(shù)g(x,y)為運(yùn)算后的二值圖像,其運(yùn)算公式為:

其中,0表示背景區(qū)域像素的灰度值,1表示裂縫區(qū)域人工標(biāo)志像素灰度值。
該圖像僅用黑白顯示,當(dāng)g(x,y)=1時,顯示為白色;當(dāng)g(x,y)=0時,顯示為黑色。
2.5 圖像去噪
受周圍環(huán)境、人為因素及圖像采集設(shè)備等的影響,任何原始圖像都存在一定程度的噪聲干擾,可能會使拍攝的裂縫圖像顯示模糊,降低圖像質(zhì)量,還會造成裂縫特征模糊,使分析裂縫變得困難。對原圖進(jìn)行灰度化、二值化處理后,再進(jìn)行平滑濾波處理,能夠消除裂縫圖像中的噪聲影響,使背景和裂縫區(qū)分變得顯著,裂縫顯示更加清晰,有利于后續(xù)工作的開展(王耀南等,2001)。去噪效果較好的方法是選用5×5模板的中值濾波器對裂縫圖像進(jìn)行濾波處理(盧曉霞,2010),這樣裂縫和背景之間的界限比較分明。故本文采用5×5模板的中值濾波器對灰度裂縫圖像進(jìn)行平滑處理。
若墻體表面存在其它缺陷(孔洞)或污點(diǎn),進(jìn)行上述處理后圖像上仍然存在“孤立”點(diǎn)或塊噪聲,則必須對其進(jìn)行消除才能進(jìn)行裂縫測量。具體方法為:利用MATLAB將二值化后的圖像中的所有目標(biāo)區(qū)域進(jìn)行標(biāo)記,統(tǒng)計(jì)各標(biāo)記區(qū)域像素個數(shù),然后獲得不同標(biāo)記區(qū)域的面積,通常裂縫區(qū)域與人工標(biāo)志區(qū)域面積遠(yuǎn)大于其它“孤立”塊或點(diǎn),故可將遠(yuǎn)小于裂縫和人工標(biāo)志區(qū)域面積的“孤立”塊或點(diǎn)消除(彭海濤,2011)。
2.6 區(qū)域分割與像素標(biāo)定
在二值圖像矩陣中,人工標(biāo)志區(qū)域與裂縫區(qū)域的數(shù)值均為1,但二者區(qū)域不連通(圖4(a))。為便于裂縫寬度計(jì)算,利用MATLAB中的 bwlabel函數(shù)將人工標(biāo)志區(qū)域與裂縫區(qū)域分割標(biāo)記(劉超,2016),人工正方形標(biāo)志區(qū)域數(shù)值標(biāo)記為1,裂縫區(qū)域數(shù)值標(biāo)記為2(圖4(b))。
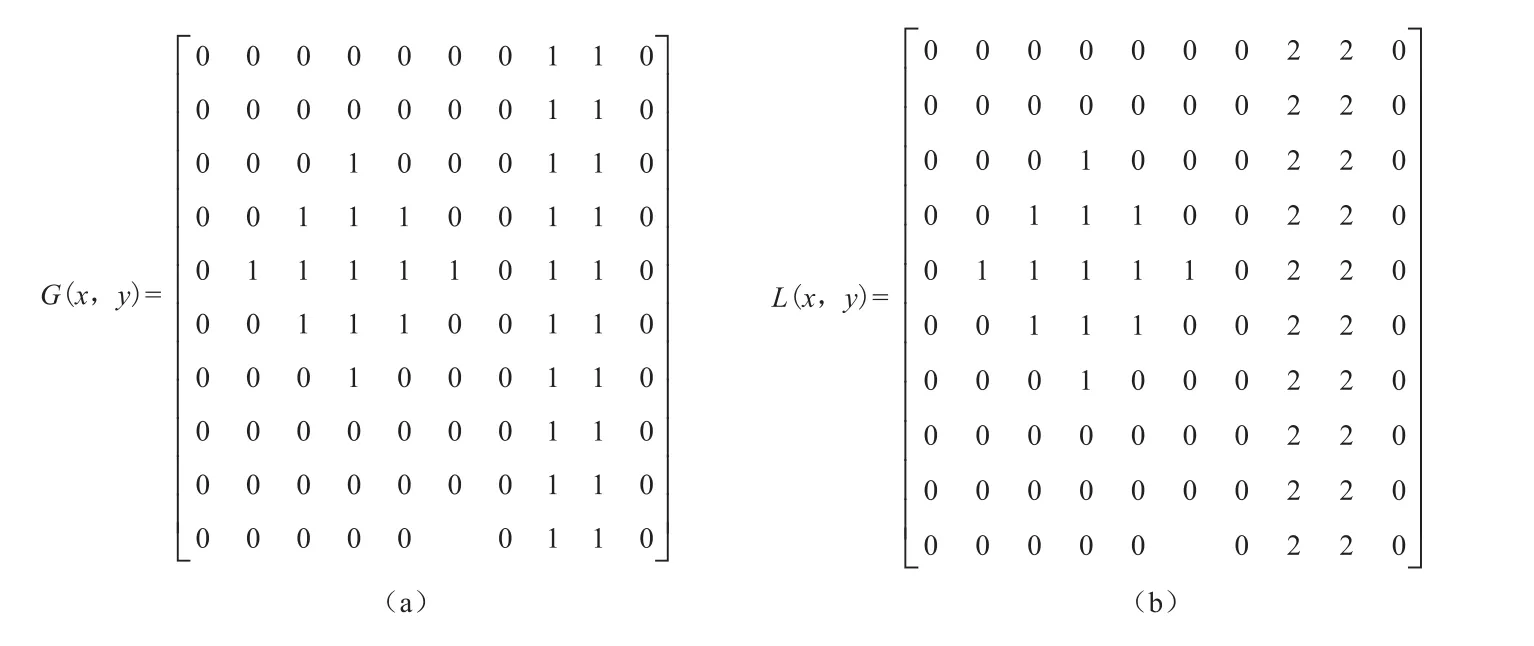
圖4 二值圖像區(qū)域分割標(biāo)記矩陣 Fig.4 Mark matrix of binary image region division
圖像經(jīng)過二值化及區(qū)域分割標(biāo)記,利用MATLAB中的find函數(shù)可獲得L(x,y)=1區(qū)域中元素坐標(biāo)的行值p與列值q,令矩陣E=[p,q],然后可用max及min函數(shù)計(jì)算得到人工標(biāo)志4個角點(diǎn)坐標(biāo),進(jìn)而計(jì)算圖像中正方形的周長Lt。圖5為人工標(biāo)志特征及其對應(yīng)矩陣數(shù)據(jù),下面僅以A點(diǎn)坐標(biāo)計(jì)算為例,進(jìn)行探討。
A點(diǎn)坐標(biāo)位于標(biāo)志區(qū)域最左側(cè),其橫坐標(biāo)最小,則A點(diǎn)橫坐標(biāo)XA=min(q),該橫坐標(biāo)值僅對應(yīng)1個縱坐標(biāo)值,基于MATLAB圖像處理技術(shù),通過索引方法(張強(qiáng)等,2012),可獲得縱坐標(biāo)YA,MATLAB運(yùn)行命令如下:
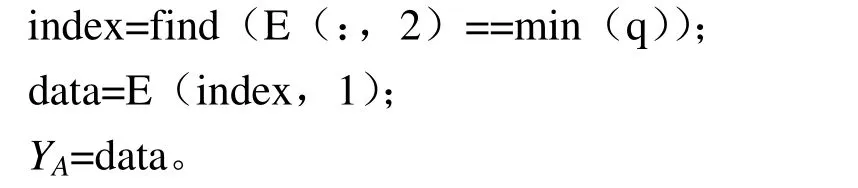
通過該方法,可依次獲得黑色正方形其余3個角點(diǎn)坐標(biāo),再利用式(1)計(jì)算圖像中正方形周長Lt,則數(shù)字圖像中單個像素所代表實(shí)際長度單位為mm/pix。
2.7 裂縫提取及寬度計(jì)算
如圖6所示,經(jīng)圖像分割后裂縫區(qū)域標(biāo)記值為2,通過MATLAB逐行尋找每行裂縫區(qū)域內(nèi)數(shù)值為2的元素個數(shù),則第i行裂縫寬度內(nèi)數(shù)值為2的元素個數(shù)為N(i),該行裂縫實(shí)際寬度為Width(i)=N(i)×δ。通過此法可獲得每行裂縫寬度值,像素個數(shù)最大行則為裂縫寬度最大處,進(jìn)而獲得拍攝圖像內(nèi)裂縫寬度的最大值max(Width(i))。
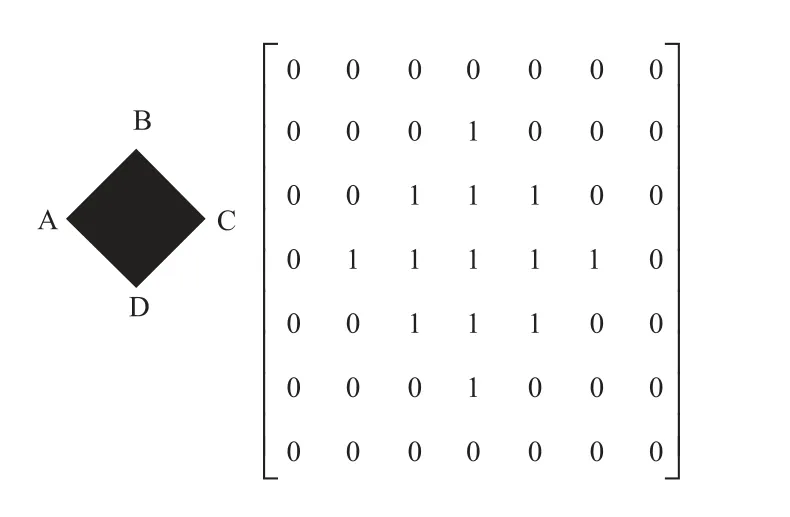
圖5 圖像中人工標(biāo)志示意圖 Fig.5 The sketch map of the artificial markers
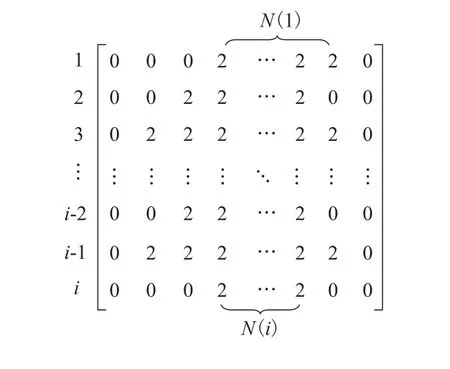
圖6 裂縫區(qū)域矩陣示意圖 Fig.6 The sketch map of crack region matrix
3 計(jì)算實(shí)例
3.1 單幅裂縫圖像裂縫寬度計(jì)算
選擇現(xiàn)實(shí)存在的房屋墻體裂縫進(jìn)行研究,在裂縫圖像拍攝前,首先選取視覺觀測裂縫寬度最大位置處。對于多條、交叉裂縫場景,則需要多次拍攝不同部位的裂縫照片,但每張圖像中僅允許1條裂縫。房屋裂縫寬度測量的過程圖如圖7所示,具體工作流程為:首先選擇所要觀測的裂縫,在裂縫左側(cè)附近放置10mm×10mm的黑色正方形人工標(biāo)志;調(diào)整手機(jī)鏡頭角度進(jìn)行拍攝,使鏡頭內(nèi)的裂縫和人工標(biāo)志均完整呈現(xiàn)(手機(jī)型號為華為BLN-AL20,拍攝像素1200萬,鏡頭自動對焦,照明方式為自動);完成圖像采集后,利用手機(jī)端的地震現(xiàn)場調(diào)查軟件把所拍攝圖像傳至計(jì)算機(jī)(吳建超等,2015);最后,在電腦端利用MATLAB軟件進(jìn)行圖像灰度變換、二值化、圖像去噪、圖像區(qū)域分割和像素標(biāo)定,最終獲得圖像內(nèi)裂縫寬度最大值。
圖7(f)中的編號1—10為實(shí)測裂縫位置,工具采用經(jīng)過標(biāo)定的游標(biāo)卡尺,其精度為0.02mm。編號11的位置為通過MATLAB圖像處理技術(shù)自動獲得的裂縫寬度最窄處,其原理為:裂縫為豎向裂縫,則裂縫寬度內(nèi)的像素個數(shù)(裂縫處二值圖像數(shù)字標(biāo)記為2)與單個像素所代表實(shí)際長度的乘積為裂縫寬度值,通過逐行查找每行內(nèi)裂縫寬度內(nèi)像素個數(shù),進(jìn)行比較,可獲得圖像內(nèi)像素個數(shù)最少值,即裂縫寬度最窄處。同樣,逐行查找處圖像內(nèi)像素個數(shù)最大值,得到編號12的位置為即裂縫寬度最寬處。編號1—12的裂縫寬度值與實(shí)測值的比較結(jié)果,如圖8和表1所示。由表1可見,裂縫寬度的實(shí)際誤差在0.0101—0.0395mm之間,相對誤差為0.67%—4.11%,平均相對誤差為1.89%,理論計(jì)算精度為98.11%,符合《房屋裂縫檢測與處理技術(shù)規(guī)程(CECS293:2011)》(湖南大學(xué)等,2011)中的裂縫寬度測量要求,即結(jié)構(gòu)構(gòu)件裂縫寬度檢測精度不應(yīng)小于0.1mm。
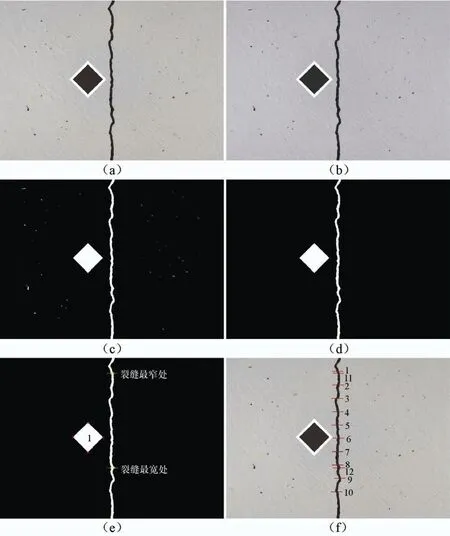
圖7 房屋裂縫寬度測量過程 Fig.7 Process of buildings width measurement of cracks
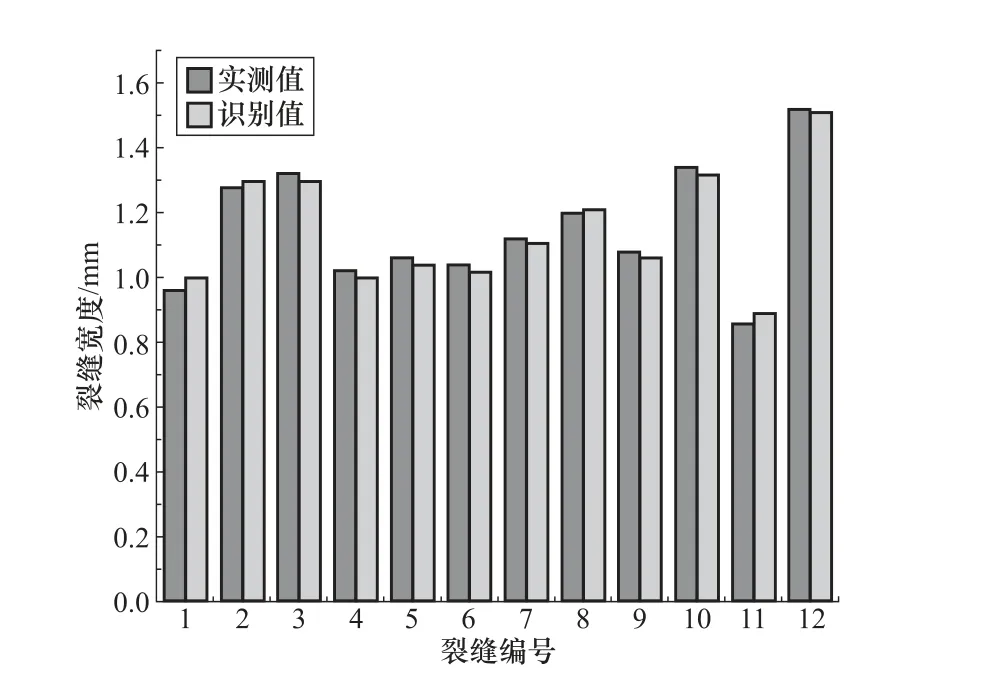
圖8 裂縫寬度理論計(jì)算值與實(shí)測值比較 Fig.8 Comparison of calculated and measured values of crack width
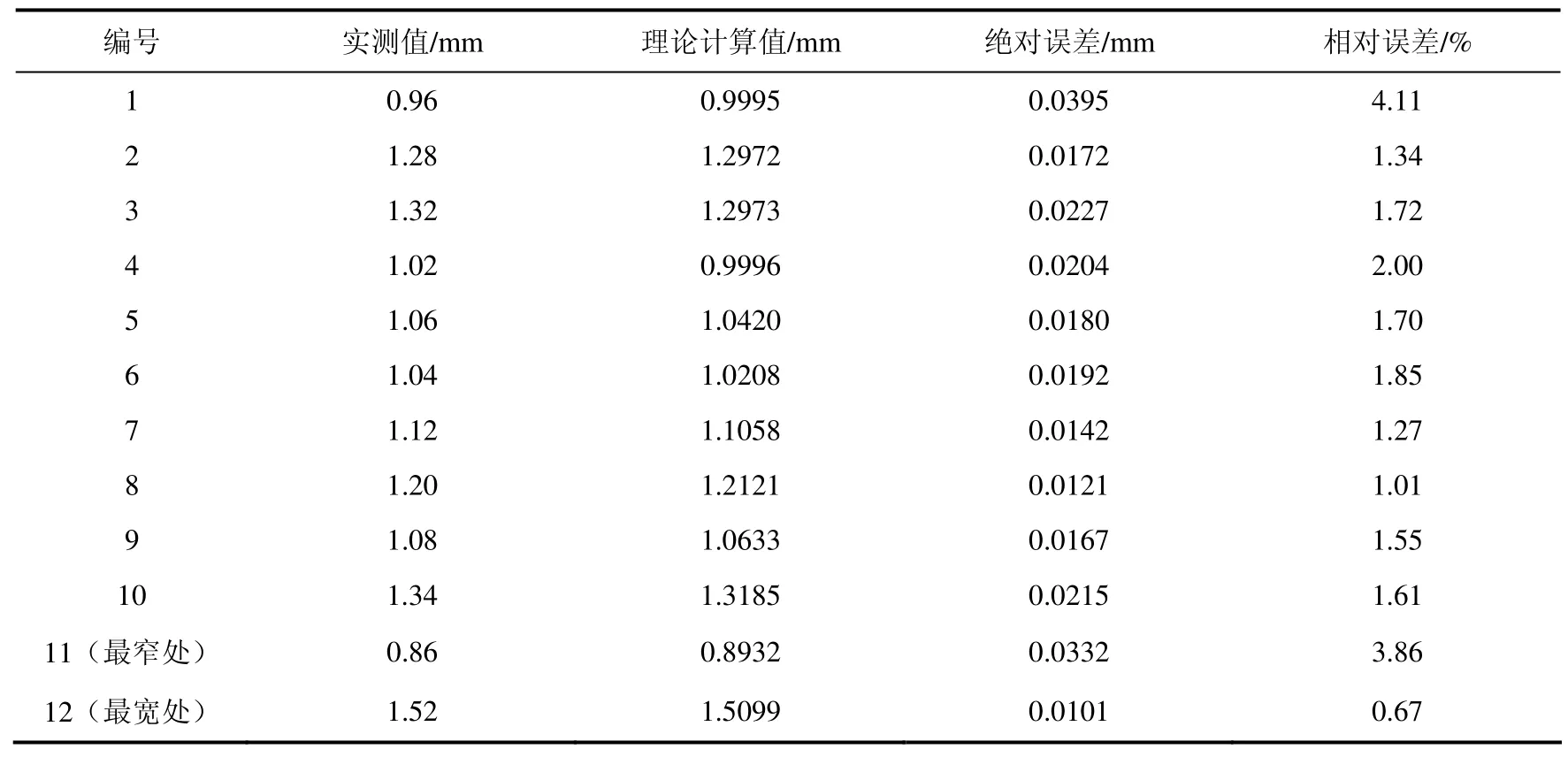
表1 裂縫寬度理論計(jì)算值與實(shí)測值的比較 Table1 Comparison of calculated and measured values of crack width
3.2 不同分辨率圖像的裂縫寬度計(jì)算
考慮到不同分辨率的圖像對裂縫寬度獲取有所影響,利用Photoshop CS6軟件對1200萬像素的原圖像進(jìn)行分辨率降低處理,進(jìn)而獲得分辨率分別為1100、1000、900、800、700、600、500、400、300、200、100、30萬像素的圖像,其中部分圖像如圖9所示。
首先,用游標(biāo)卡尺測量目標(biāo)測試處的裂縫寬度,然后利用本文的方法計(jì)算13幅不同分辨率圖像中目標(biāo)測試處的裂縫寬度,計(jì)算結(jié)果與實(shí)測結(jié)果如表2和圖10所示。對比可知,圖像分辨率越高,裂縫寬度的測量誤差越小。

圖9 不同分辨率的裂縫圖像 Fig.9 Crack images with different resolutions

表2 不同分辨率下裂縫目標(biāo)位置寬度的識別值與實(shí)測值的比較 Table2 Comparison of identification and actual measured values of crack width at different resolutions

續(xù)表
4 結(jié)論
本文基于圖像處理技術(shù),運(yùn)用MATLAB軟件對房屋的裂縫寬度進(jìn)行了檢測,獲得以下認(rèn)識:
(1)利用本文提出的檢測方法識別裂縫寬度,精度較高,達(dá)到98.11%,誤差最大值為0.0395mm,滿足裂縫寬度檢測f的精度要求。
(2)將裂縫圖像進(jìn)行灰度化、二值化、圖像去噪、圖像分割與標(biāo)定等處理后,能夠較為便捷有效地得到裂縫信息數(shù)據(jù),進(jìn)而獲得裂縫的實(shí)際寬度。獲取圖像設(shè)備的分辨率越高,識別得到的裂縫寬度誤差越小。在地震現(xiàn)場工作時,本方法能夠快速地為房屋破壞等級評價提供依據(jù)。
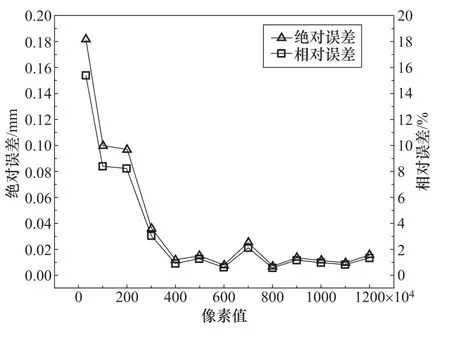
圖10 不同分辨率的裂縫圖像目標(biāo)位置測試誤差 Fig.10 Target resolution test errors for crack images with different resolutions
致謝:感謝審稿專家對本文提出寶貴修改建議。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15
