單翼大撓性航天器全局模態動力學建模及試驗
2019-05-09 10:00:00袁秋帆王超磊齊乃明曹世磊
宇航學報 2019年4期
袁秋帆,王超磊,齊乃明,曹世磊
(1. 上海系統工程研究所,上海 201109;2. 北京仿真中心航天系統仿真重點實驗室,北京 100854; 3. 哈爾濱工業大學航天工程系,哈爾濱 150001)
0 引 言
隨著航天科技的發展,撓性結構尺寸和重量逐漸增加,撓性附件的振動會帶動中心剛體運動,這種耦合形式可稱為小中心剛體-大撓性附件的耦合形式。在小角度和小位移機動時,這種航天器的撓性結構會產生振動,但一般不會出現較大變形,可以將其簡化為線性系統處理。對其進行控制器設計的基礎是建立合適的動力學模型。傳統的約束模態動力學模型采用懸臂狀態下的撓性振動模態方程與中心剛體運動方程構成剛柔耦合動力學方程。全局模態法又被稱為非約束模態法,在20世紀70年代到80年代,文獻[1-4]詳細研究了非約束模態法,即使用整個航天器自由-自由狀態下的模態振型進行模態展開,振型描述函數包含撓性結構和中心剛體,推導了非約束模態的正交性及其慣性完備性準則。Hablani[2,4]指出非約束模態建模和約束模態建模的精度與剛柔慣量比有關,指出剛柔慣量比較小時,約束模態法建立的動力學模型將有比較大的誤差。Goal[5]指出約束模態法動力學模型采用約束模態描述了剛體與撓性結構之間的耦合作用,而全局模態法動力學模型描述了撓性航天器整體的動力學特性,是輸入與輸出的耦合特性。
以上研究中僅考慮了撓性航天器的姿態運動,然而當中心剛體占比較小時,大撓性結構的振動將同時影響小中心剛體姿態運動和位置運動,在建模時不能僅考慮本體姿態運動與撓性振動的耦合特性,還要考慮本體位置運動與撓性結構振動的耦合特性。章仁為[6]采用約束模態法建立了動力學模型,同時考慮了姿態耦合特性和位置耦合特性,并采用轉動耦合系數和平移耦合系數分別描述。Pgasbarri[7]采用帶有雙側對稱帆板的氣浮式模擬器研究了撓性航天器動力學,指出雙側對稱帆板構型的航天器存在對稱模態和反對稱模態,對稱模態對應位置耦合特性,反對稱模態對應姿態耦合特性。徐小勝等[8]基于剛柔耦合動力學模型,采用了約束模態頻率估計了非約束模態頻率。呂旺等[9]對采用類似的方法對非約束模態頻率進行了估計,并與在軌試驗結果進行了對比,在撓性結構比較小的情況下,估計誤差在15%以內,其方法仍是基于剛柔耦合動力學模型。
2014年,Gasbarri[10]采用有限元法分析了含有多個大撓性結構的航天器的非約束模態動力學特性,建立了包含位置耦合特性和姿態耦合特性的完整的非約束模態動力學模型,并且定義了中心剛體“模態振型”(the ‘shape’ of the satellite)的概念,將中心剛體的剛體運動和撓性結構振動一并納入模態振型。文獻[11-12]采用瑞利瑞茲法計算了帶有雙側對稱帆板的航天器的全局模態振型,并給出了模態頻率隨著帆板長度、中心剛體慣量和帆板構型的改變的變化規律,采用對稱模態振型和反對稱模態振型分別描述了位置耦合特性和姿態耦合特性。
以上研究均采用了雙側對稱帆板的航天器構型,姿態耦合特性和位置耦合特性不會存在于同一階全局模態中。而當航天器僅帶有單側撓性結構時,在其同一階全局模態中,同時存在姿態耦合特性和位置耦合特性,目前相關的研究較少。
大部分航天器采用了雙側對稱帆板構型,有一小部分航天器采用了單側帆板構型,比較典型的有中國風云三號、四號衛星,美國NASA的Aura衛星、歐洲太陽神衛星、日本的大地衛星等,研究單側撓性航天器的建模問題有重要的工程意義。
本文將針對小中心剛體-單側大撓性結構構型的航天器,通過定義廣義全局模態振型提出了一種全局模態動力學模型,采用統一形式描述整體剛體運動和整體撓性變形,與現有研究相比,形式更加簡潔統一,解決了單側大撓性航天器的動力學建模問題。結合瑞利瑞茲法分析非約束模態頻率隨著質量比和慣量比的變化而變化的情況,與有限元模型比對了動力學響應,并且構建試驗系統,進行了非約束模態頻率的測量和對比分析。
1 全局模態法動力學建模
1.1 全局模態振型
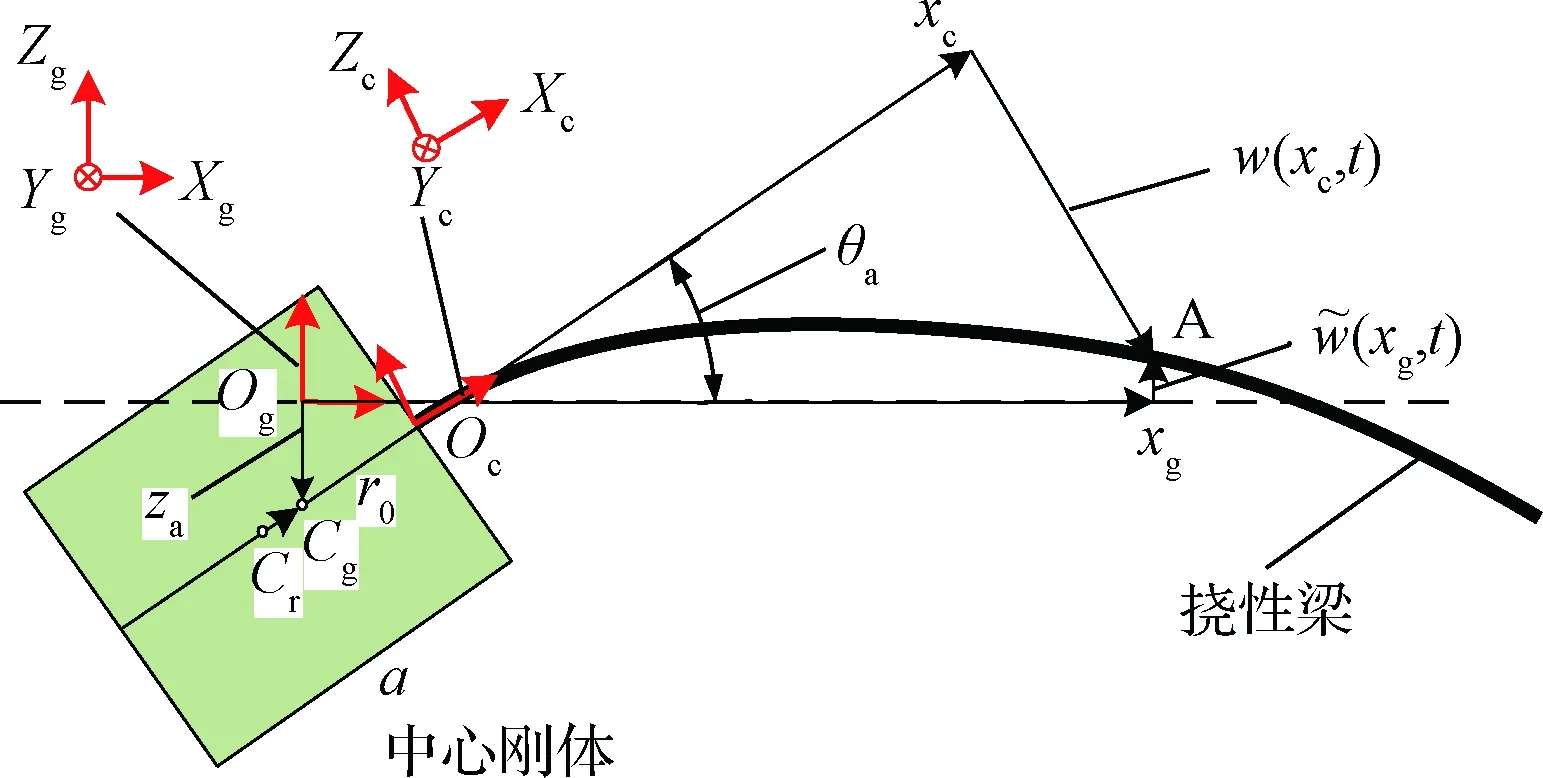
圖1 全局模態法坐標系定義Fig.1 The definition of constrained modal shape function
假設za為小位移,θa為小角度,則有如下近似的撓度關系
(1)
式中:r0=CgOc,l為撓性梁長度,xg∈[-a+r0,r0+l],xc∈[0,l],浮動坐標系下的撓度可以模態展開為
(2)
式中:φk(xc)為非約束狀態下,在浮動坐標系下描述的撓性結構模態振型。
在非約束邊界條件下,第k階撓性模態振動時,中心剛體也有相應的位移和角度變化。定義整體質心的模態位移為zak,繞質心的模態轉角為θak,則整體質心的位移可以表示為模態位移的疊加,整體剛體轉動角度可以表示為模態轉角的疊加,即
則式(1)可以轉化為
(3)
式中:
(4)
為全局模態振型。
定義整體的轉動運動為第一階剛體模態,整體的平移運動為第二階剛體模態,則這兩階模態振型函數可由式(4)表示,第一階剛體模態振型可以表示為
(5)
第二階剛體模態振型可以表示為
(6)
撓性振動模態振型為第三階以及更高階模態振型,模態振型函數表示為
(7)
式中:k=3,4,5…。
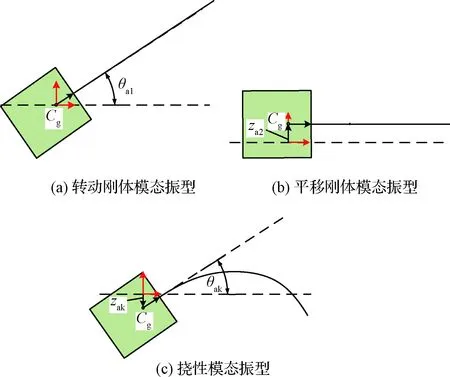
圖2 全局模態振型Fig.2 Global modal shape
至此,剛體的運動和撓性結構的振動均通過式(4)描述的全局模態振型表示。定義ρrAr,ρbAb和ρA分別為中心剛體、撓性梁和整體沿OgXg軸的線密度分布。定義
式中:Er和Ir分別為中心剛體沿xg方向的楊氏模量和截面慣性矩,Eb和Ib分別為撓性梁沿xg方向的楊氏模量和截面慣性矩。定義Jgr,Jgb和Jg分別為中心剛體、撓性梁和整體繞OgYg軸的轉動慣量。定義Mg=Ma=Mr+Mb為總質量,Mr為剛體質量,Mb為撓性結構質量。
定理1. 由式(4)定義的非約束模態振型滿足正交性,并且
(8)

為狄拉克函數。
證.文獻[11]指出當單個撓性梁滿足兩端約束條件為自由、簡支和固定三種簡單約束時,模態振型是正交的,該結論可以通過邊界條件方程簡單推導得出,給出了判斷模態振型正交性的一個簡便的方法。中心剛體-撓性梁系統整體滿足自由-自由的邊界條件,按照文獻[11]的理論,全局模態振型的正交性是顯然的。
1.2 動力學方程
整體動能為
(9)

整體勢能為
(10)
又平面內應變與撓度的關系為
(11)
設沿著Zg軸方向施加的外力為F,施加位置為xf g,繞與Yg軸平行的軸施加的外力矩為T,施加位置為xτg,則外力做功的變分可以表示為
(12)
根據哈密頓原理有
(13)
(14)
其中,δ(x)為狄拉克函數。
(15)

1)當k=1時,計算得φ1=Jg,式(15)轉化為
(16)
式(16)與剛體姿態動力學方程一致,此時第一階全局模態坐標η1為整體作為剛體時的轉動角度。
2)當k=2時,計算得φ2=Mg,式(15)轉化為
(17)
式(17)與剛體位置動力學方程一致,第二階全局模態坐標η2為整體作為剛體時的平移位置。
將式(15)添加阻尼比,考慮前Nm階模態,將全局模態動力學方程寫成矩陣形式為
(18)

與約束模態的剛柔耦合動力學模型相比,全局模態動力學模型采用了統一的形式描述整體的剛體運動和撓性振動,形式上更加簡潔,由于沒有采用懸臂模態振型的正交性假設,對小中心剛體-大撓性結構的撓性航天器構型,全局模態動力學模型要更加精確。
1.3 非約束模態頻率計算
對于中心剛體-撓性梁這類簡單結構,可以利用全局模態振型構造瑞利瑞茲法的特征參數,采用瑞利瑞茲法計算全局模態振型對應的非約束模態頻率。
首先建立第一階模態基振型的多項式函數,設
X1(x)=a0+a1x+a2x2+a3x3+a4x4
(19)
為描述簡便,首先認為撓性梁長度為1,約束條件表達為

(20)
代入式(19)解出
X1(x)=a4(6x2-4x3+x4)
(21)

(22)
每一階正交基均進行歸一化處理,
(23)
當撓性梁長度為l時,其正交基可以表示為
(24)
第k階全局模態振型由中心剛體的模態角度θak,模態位移zak和浮動坐標系下的模態振型φk組成,瑞利瑞茲法的基本原理是,針對一階模態,其模態動能的最大值等于模態勢能的最大值,即(EK)k_max=(EP)k_max。
考慮第k階全局模態,
令ηk(t)=sin(ωkt),根據式(9)和式(10)定義的動能和勢能方程,可得
(25)
A=[A1,…,ANx]T,Xl=[Xl1,…,XlNx]
Nx為基振型個數。令
M和K分別為廣義質量和剛度矩陣。求取(KE)k_max和(PE)k_max的雅克比矩陣
(26)
(27)
根據撓性結構特征方程
(K-λ2M)u=0
(28)

2 仿真分析
本章采用一個固定尺寸的撓性梁和一個邊長為變量的中心剛體構成中心剛體-撓性梁系統,分析全局模態法對非約束模態頻率和模態振型的計算精度,并且分析模型的動態響應精度。基本模型如圖3所示,中心剛體為邊長為的立方體,其他參數如表1所示。
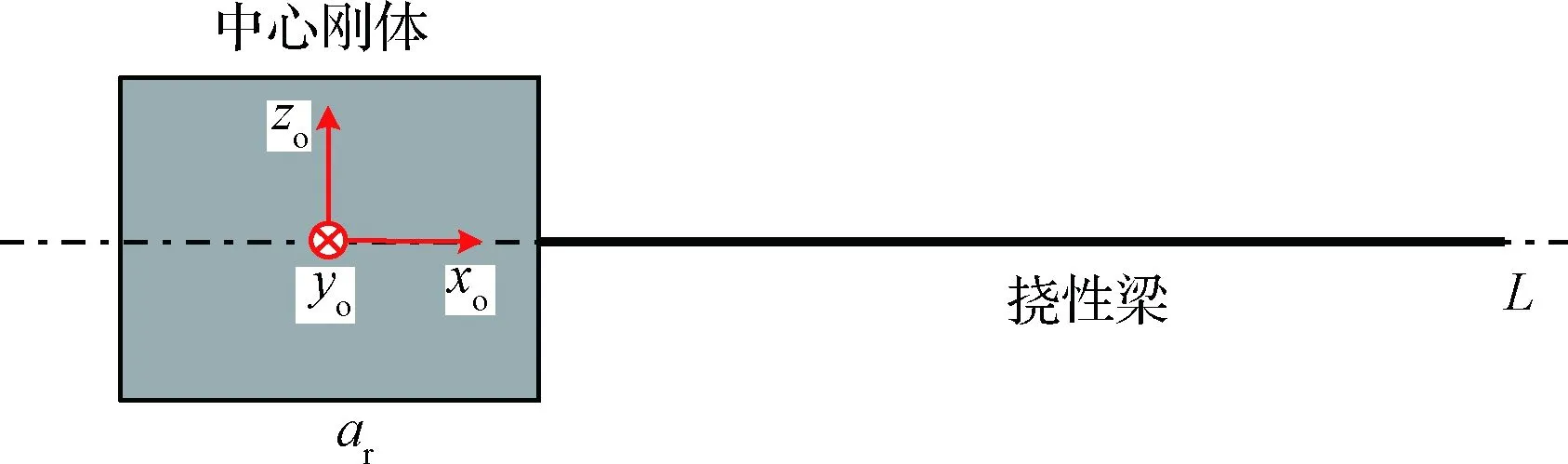
圖3 仿真基本結構Fig.3 The basic structure for simulation
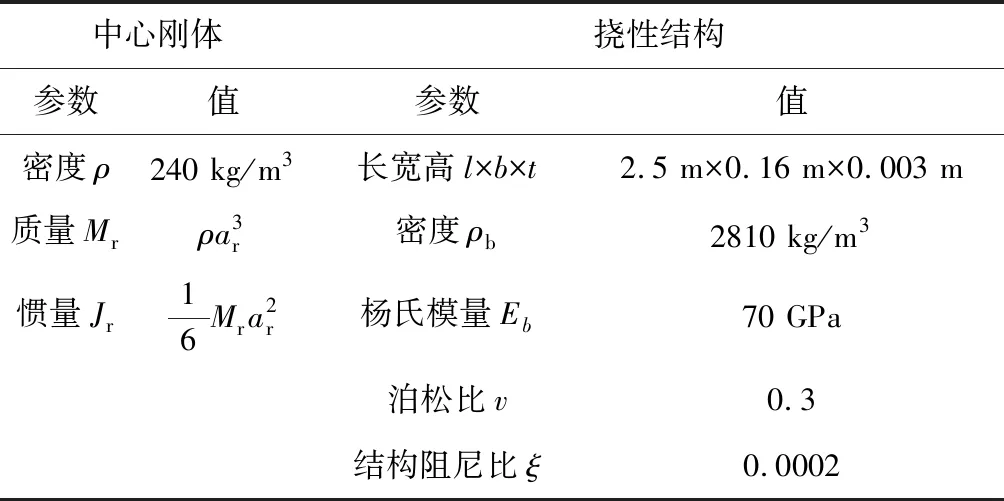
中心剛體撓性結構參數值參數值密度ρ240 kg/m3長寬高l×b×t2.5 m×0.16 m×0.003 m質量Mrρa3r密度ρb2810 kg/m3慣量Jr16Mra2r楊氏模量Eb70 GPa泊松比v0.3結構阻尼比ξ0.0002
2.1 非約束模態頻率
2)在λJ<1的區間內,隨著中心剛體的減小,非約束模態頻率逐漸增大,當進入λm<1的區間內,非約束模態頻率隨著中心剛體的減小而增大的速率更快。可知,非約束模態頻率與剛柔慣量比、質量比是一一對應的。
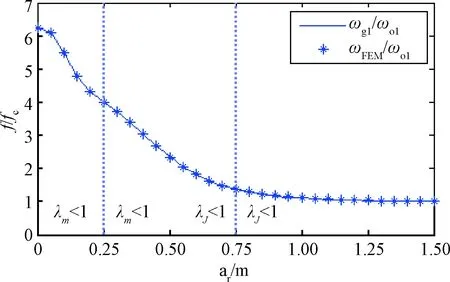
圖4 非約束模態頻率Fig.4 Unconstrained modal frequencies
2.2 非約束模態振型

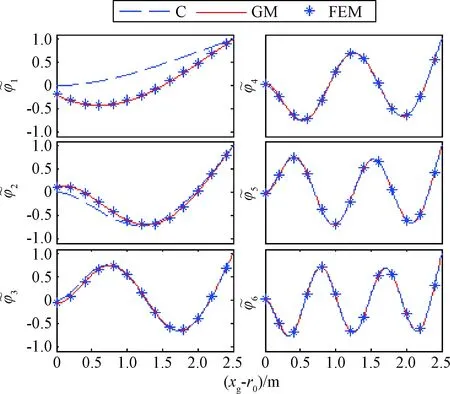
圖5 非約束模態振型Fig.5 Unconstrained modal shapes
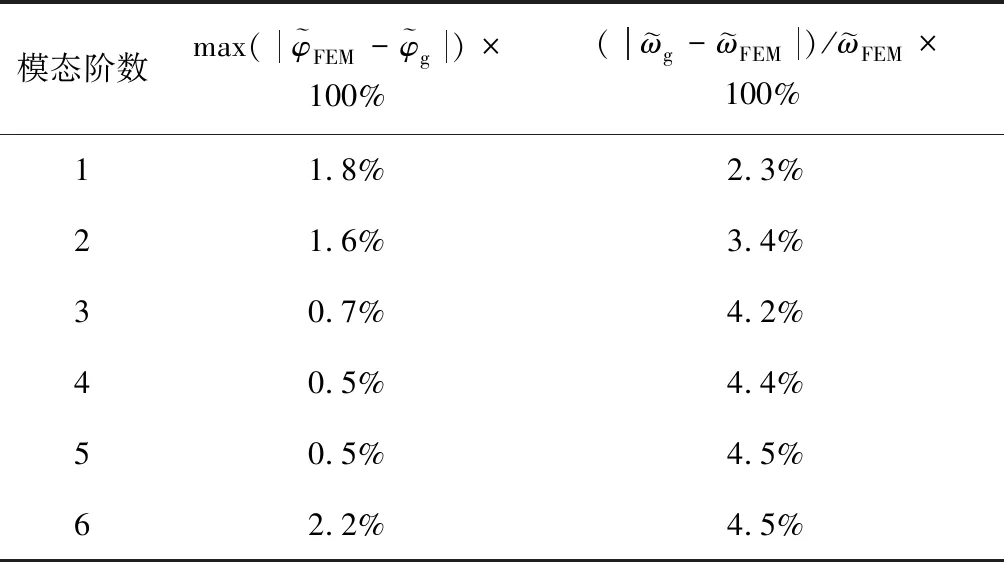
模態階數max(φFEM-φg)×100%(ωg-ωFEM)/ωFEM×100%11.8%2.3%21.6%3.4%30.7%4.2%40.5%4.4%50.5%4.5%62.2%4.5%
2.3 動態響應
為了進一步驗證全局模態動力學模型的準確度,在中心剛體上施加的力F和力矩T,如圖6所示,采用所建立的全局模態動力學模型和有限元法計算模型的動力學響應,對比中心剛體轉角θ、位置z和撓性結構的端部位移ztip,結果如圖7、圖8和圖9所示。圖中,“GM”表示全局模態法計算結果,“FEM”表示有限元法計算結果。
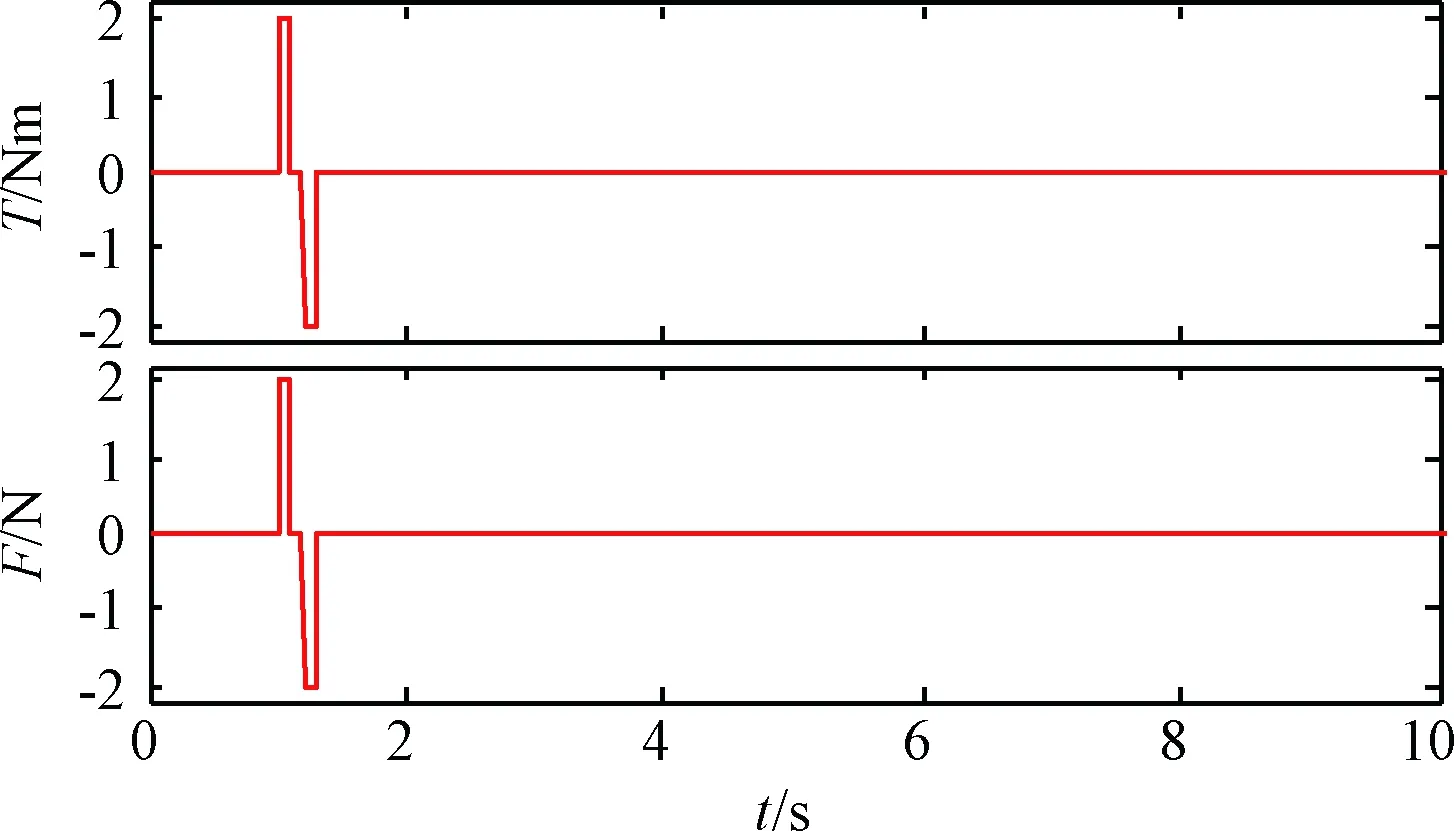
圖6 施加的力和力矩Fig.6 Applied force and torque

圖7 中心剛體角度響應Fig.7 The responding angle of the rigid body

圖8 中心剛體位置響應Fig.8 The responding displacement of the rigid body
根據結果分別計算最大誤差,如表3所示,可見有限元計算結果和動力學模型還是比較相近的。
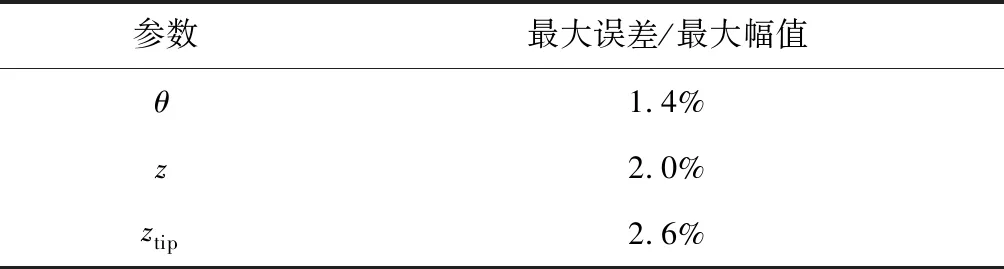
表3 動態響應誤差Table 3 Dynamic response errors
3 試驗分析
為了進一步驗證全局模態動力學模型的準確性,搭建了如圖所示的試驗系統,中心剛體為三自由度氣浮模擬器,下方安裝有氣足,可以實現無摩擦的兩個水平軸向的平移運動和繞垂直軸的旋轉運動。撓性板連接在中心剛體上,端部安裝有支撐氣足和端部質量塊,端部質量塊用于降低撓性結構的基頻,提高撓性結構的質量和慣量占比。撓性結構的尺寸同表1,中心剛體的尺寸為0.9 m×0.9 m×1.2 m,中心剛體重量為240 kg。當中心剛體的氣足關閉,撓性板支撐氣足打開時,撓性板處于懸臂狀態;當中心剛體的氣足和撓性板支撐氣足同時打開時,整體處于非約束狀態。在撓性板根部安裝有力矩傳感器,用于測量振動。
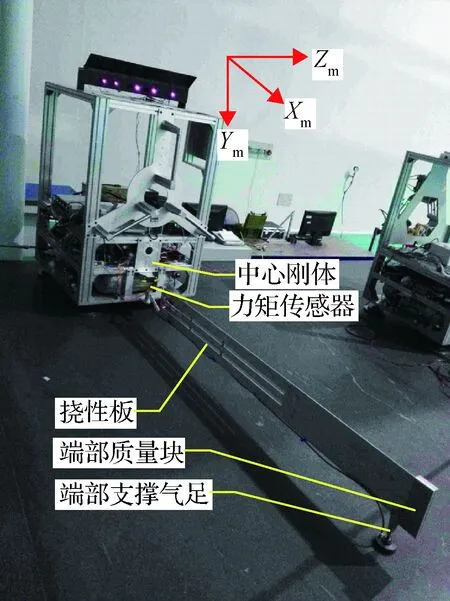
圖10 施加的力和力矩Fig.10 Applied force and torque
3.1 懸臂模態頻率測試
將中心剛體的氣足供氣關閉,只開啟撓性板端部支撐氣足的供氣,此時撓性板處于懸臂狀態,在懸臂狀態下對其進行敲擊,測量自然振動。
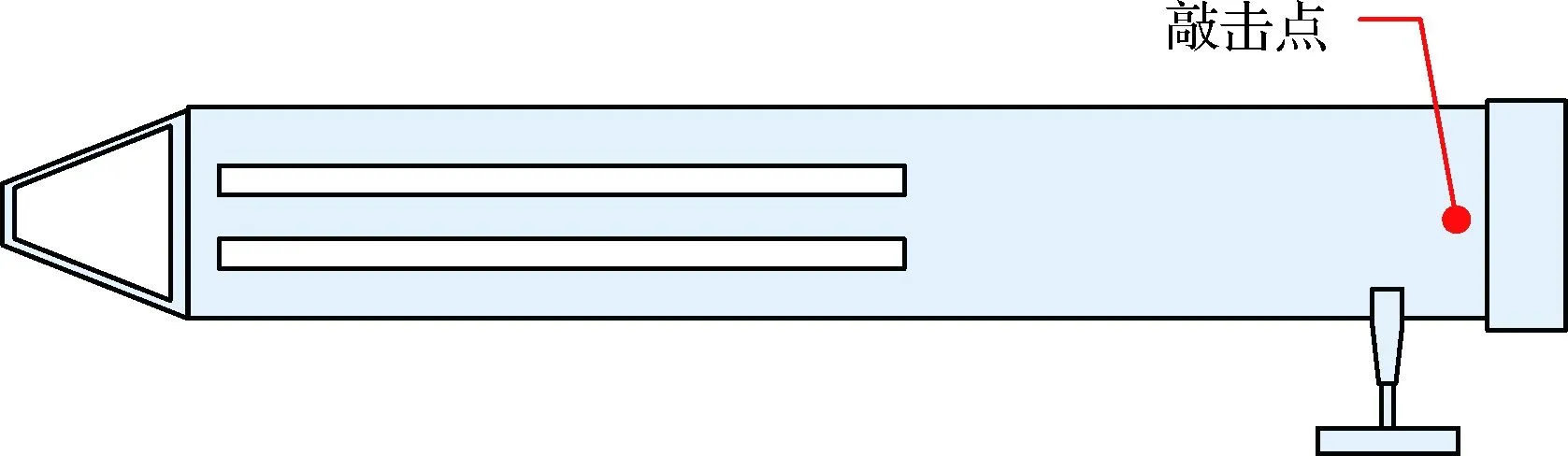
圖11 試驗敲擊點Fig.11 Test knocking points
圖12給出了根部力矩傳感器測量結果,分析試驗結果可知,敲擊撓性板端部主要激發了第1階模態,第1階模態頻率為ω1=0.2731 Hz,第2階模態頻率為ω2=2.5790 Hz。從表4可以看出實測值略小于有限元分析值,這是由于撓性板收到摩擦力、風阻還有其上管路的影響。
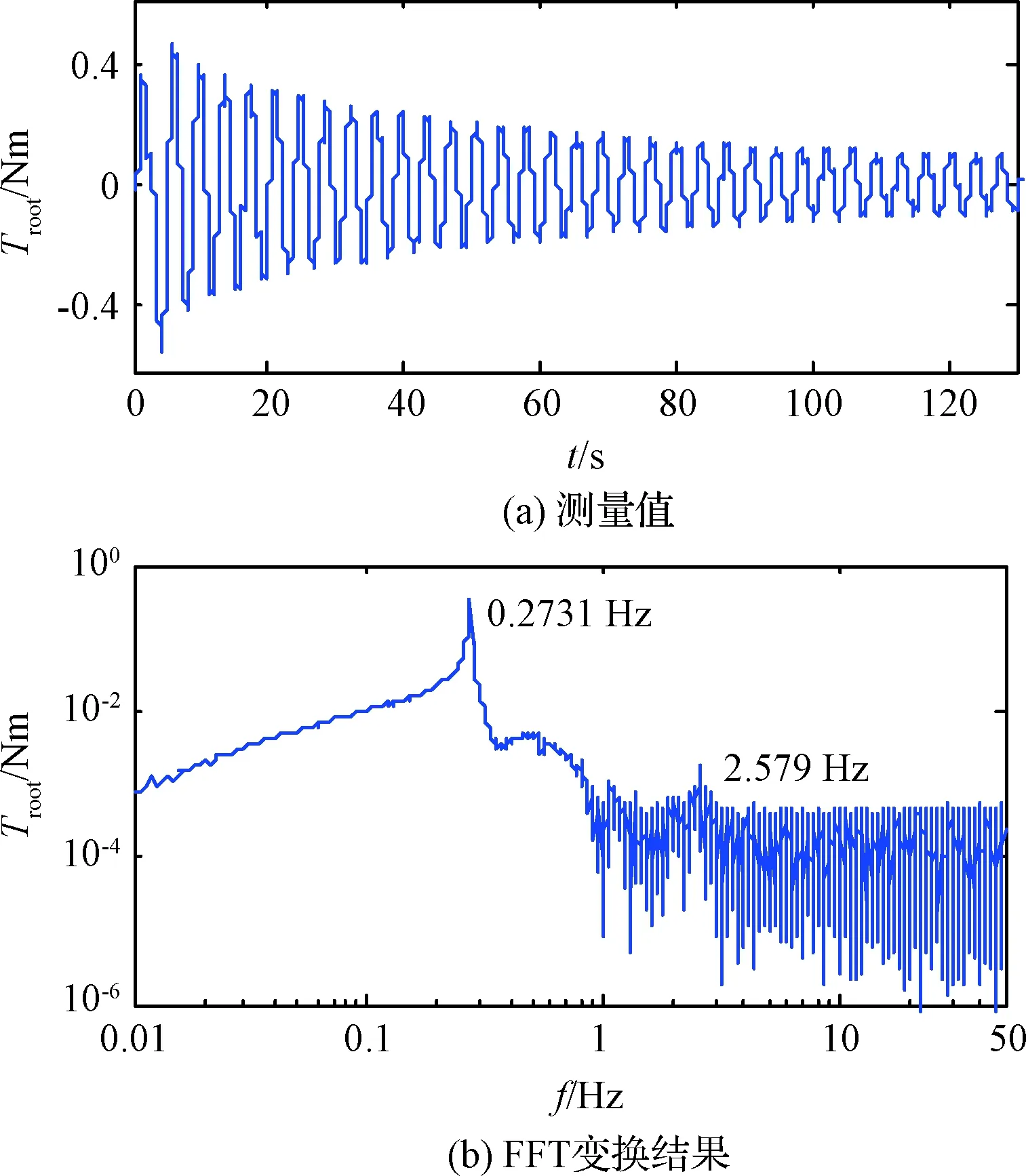
圖12 懸臂狀態下敲擊點1力矩傳感器測量結果Fig.12 Torque sensor’s measurement results with point 1 knocked under cantilever state
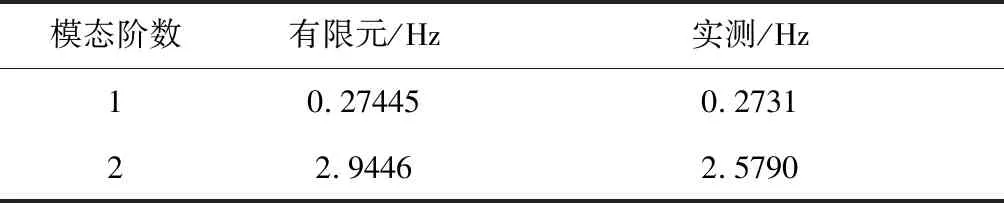
模態階數有限元/Hz實測/Hz10.274450.273122.94462.5790
3.2 非約束模態頻率測試
同時打開中心剛體的氣足和撓性板端部支撐氣足的供氣,此時中心剛體與撓性板構成的剛柔耦合系統處于無約束狀態,設置與圖11相同的敲擊點,對撓性結構進行敲擊,測量自然振動。圖13給出了力矩傳感器測量值和FFT變換結果,表5給出了仿真計算和試驗測試的非約束模態頻率,分析試驗結果:1)第1階和第2階模態頻率均略低于有限元計算值,但誤差不大;2)第1階模態被激發的幅值遠大于第2階模態幅值,2階以上的模態沒有被激發。
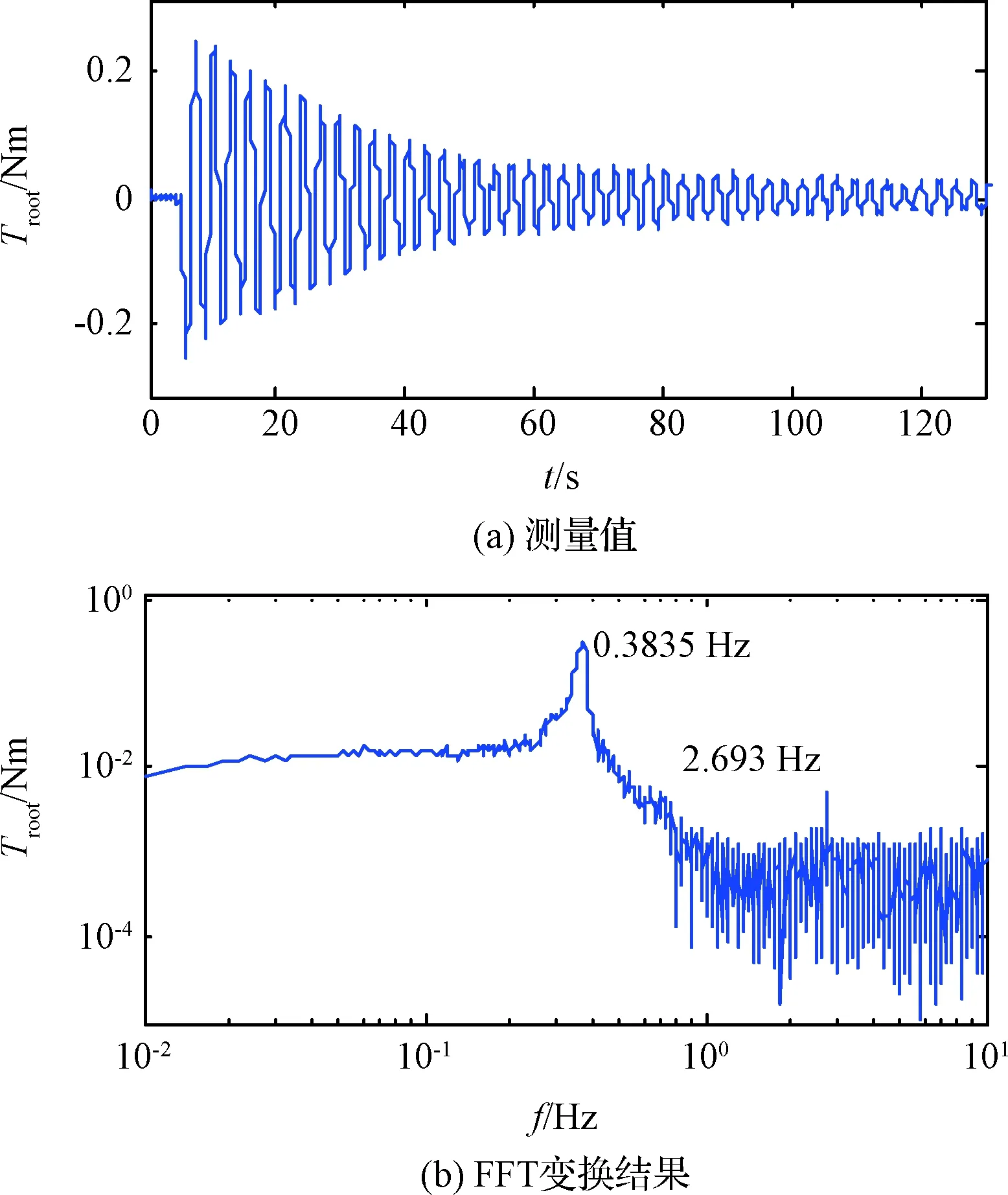
圖13 無約束狀態下敲擊點2力矩傳感器測量結果Fig.13 Torque sensor’s measurement results with point 2 knocked under unconstrained state
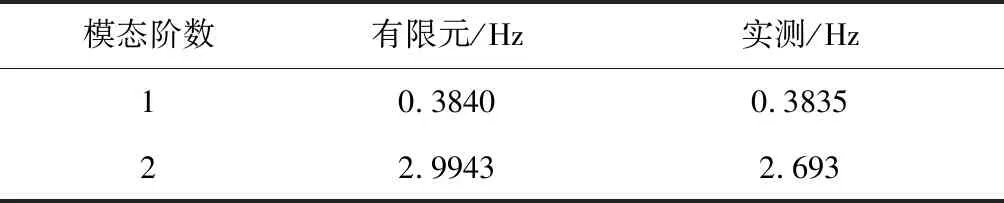
模態階數有限元/Hz實測/Hz10.38400.383522.99432.693


表6 非約束模態頻率與懸臂模態頻率的比值Table 6 Ratios of unconstrained modal frequencies and cantilever frequencies
由表6可知,試驗結果與有限元計算結果、理論計算結果均比較一致,驗證了全局模態動力學模型的準確性。
4 結 論
本文針對小中心剛體-單側大撓性結構構型的航天器,通過定義廣義全局模態振型提出了一種全局模態動力學模型,采用統一形式描述整體剛體運動和整體撓性變形。結合瑞利瑞茲法分析了非約束模態頻率隨著質量比和慣量比的變化情況,通過仿真、試驗兩種方式校驗了所建立的全局模態動力學模型的準確性。結果說明全局模態動力學模型能夠比較準確地描述非約束模態頻率和模態振型,第一階模態頻率的最大誤差為0.003 Hz,前六階歸一化模態振型計算最大誤差為2.2%;通過與有限元模型比對,理論模型能夠比較準確地描述動態響應,端部橫向位移的最大誤差為2.6%;基于氣浮平臺構建了試驗系統,測量得到的非約束模態頻率與懸臂模態頻率的比值,理論模型、有限元仿真和物理試驗結果均比較接近,說明理論模型準確描述了非約束模態頻率隨剛柔耦合特性變化的規律。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學與工程(2015年4期)2015-09-26 11:59:03
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39