模糊PID 和變頻器在地下恒壓灌溉控制系統的應用
2019-05-09 03:26:02李余進黃兆波楊彥鑫
自動化與儀表 2019年4期
吳 迪,李余進,黃兆波,李 琦,楊彥鑫
(云南農業大學 機電工程學院,昆明650201)
華寧縣是云南省內有名的柑桔栽培區, 亨有“桔鄉”的美譽[1]。 該地區地貌類型復雜,垂直高差懸殊大,柑桔在生長的過程中需水量大,傳統的灌溉方式灌溉均勻性差,設備和管網容易出現故障和破損,水資源利用率不高,能源消耗大。 因此在地下恒壓灌溉系統中保證管網壓力的恒定對于整個系統具有重要意義。
灌溉系統是一個非線性、滯后性、時變性的復雜系統,很難建立精確的數學模型,常規的PID 控制雖然具有結構簡單、穩定性好等特點[2],但是針對該灌溉系統常規PID 控制方法很難保證管網壓力恒定和較好的控制效果。 為了解決此問題,故在此采用模糊PID 控制和變頻調速相結合的方法。 模糊PID 控制的特點在于無需知曉被控對象精確的數學模型,只需要提供現場操作人員和專家灌溉的經驗數據,采用模糊數學的相關知識,將精確量進行模糊化,通過模糊推理和解模糊后輸出Kp,Ki,Kd參數給PID 控制器,實現參數在線整定的目的來保證管網壓力的恒定,它既體現了模糊控制靈活而適應性強、超調小的特點,又保證了PID 控制器的良好動態跟蹤品質和穩態精度,對復雜系統可以得到滿意的控制效果[3]。
在此, 針對地下恒壓灌溉系統管網壓力的特點,設計了實現管網系統壓力實時控制的模糊自整定PID 控制器, 并利用MatLab 軟件中的模糊控制工具箱和Simulink 進行了系統的建模和仿真分析。
1 恒壓灌溉控制系統的整體設計
1.1 試驗裝置
采用的試驗裝置主要包括數據采集模塊、控制器PLC、系統執行模塊、種植箱、管網系統。 試驗裝置模型如圖1 所示。

圖1 試驗裝置模型Fig.1 Experimental device model
1.2 恒壓控制系統概述
恒壓灌溉控制系統主要由三菱PLC、 變頻器、(HMI)觸摸屏、抽水電機、水桶、壓力變送器、光照度變送器、流量計、管網等組成。 該控制系統分為三大部分:數據采集模塊、控制器PLC 和系統執行模塊。 ①數據采集模塊 主要通過各類傳感器進行現場信息的采集,然后將采集的信息通過ZigBee無線網絡技術將壓力、光照、液位等信息通過無線傳輸的方式,把控制信息傳給控制器PLC;②控制器PLC 主要負責數據的邏輯運算和存儲;③系統執行模塊 主要負責完成控制器發出的執行命令。
該系統通過(HMI)觸摸屏進行數據的實時顯示和存儲, 最后可以將這些數據上傳至PC 或保存在U 盤里, 同時可以實現集中控制與手動控制的轉換以及聲光報警。 手動方式可以設置管網的壓力、電機的頻率、光照等。 該系統采用模糊PID 和變頻調速的方法,能夠快速、準確、穩定地實現管網壓力的在線控制并保證管網壓力的恒定。
1.3 工作原理
恒壓灌溉控制系統是由三菱PLC、變頻器、抽水電動機、壓力變送器等設備構成的閉環控制系統。該系統采用模糊PID 控制的方法,管網的壓力由壓力變送器進行采集, 將采集的壓力值輸入模糊PID控制器并與設定壓力值進行比較,計算出壓力誤差e 和壓力誤差變化率ec, 經過模糊化后得到模糊控制量E 和EC;E 和EC 通過模糊推理得到PID 自整定參數修改值ΔKp,ΔKi,ΔKd, 將該推理結果輸出給PID 控制器,經過解模糊后將執行命令傳給變頻器,變頻器將會以不同的頻率調整電機的轉速,從而實現對管網壓力的恒壓控制目的。
三相異步電動機的轉速n 為
式中:f 為供電電源頻率;p 為異步電動機的磁極對數;s 為轉差率。
1.4 變頻恒壓節能原理
恒壓灌溉控制系統通常以壓力為控制參數,一般采用2 種控制方法,轉速控制和閥門控制。 ①閥門控制是在抽水電機轉速恒定的情況下,通過改變閥門開度來調節管網的壓力;②轉速控制法是將閥門開度恒定在某個區間,通過調節抽電機的轉速改變管網系統的壓力[4]。 根據抽水電機變速的原理,調速前后流量Q,揚程H,水泵消耗的功率(軸功率)P與轉速N 之間的關系為
式中:Q1,H1,P1分別為變速前的流量、 揚程、 功率;Q2,H2,P2分別為變速后的流量、揚程、功率[5]。 由式(2)可知,水泵流量Q 與轉速N 成正比,揚程H 與轉速N 的平方成正比,軸功率P 與轉速N 的3 次方成正比。

對于恒壓灌溉控制系統,其管網的壓力一般會根據具體的地形、管網的布置和開閥的情況,進行壓力的設置; 如果水泵長時間處于工頻運行狀態,就會造成能源的大量浪費, 同時也存在安全隱患。因此,根據具體的控制農藝要求將壓力設置在某一范圍,采用變頻調速的方法,壓力變送器進行在線采集管網的壓力,將壓力值進行模糊化處理,通過模糊推理、解模糊,最終將壓力轉化為頻率,變頻器通過不同的頻率來調節水泵的轉速,從而保證系統的壓力恒定。 通過分析采用變頻調速控制的方法所消耗的電能比閥門控制的方法要少得多,節能效果非常顯著。
2 模糊PID 控制器的設計
2.1 模糊PID 控制器工作原理
模糊PID 控制器以壓力偏差e 和壓力偏差變化率ec 作為輸入,它們經過模糊化處理后變成模糊語言集合的子集E 和EC[6]。 經過模糊規則、模糊推理和反模糊處理,可以得到PID 參數的調節量ΔKp,ΔKi,ΔKd,輸入PID 控制器后,利用
在線整定出PID 參數Kp,Ki,Kd。 最后,根據PID 算法計算出控制量u,將控制命令u 經過變頻器以不同的頻率來改變抽水電機的轉速,從而使恒壓灌溉控制系統具有良好的動、靜態性能,實現對管網壓力的實時控制。 模糊自適應PID 控制器結構如圖2所示。
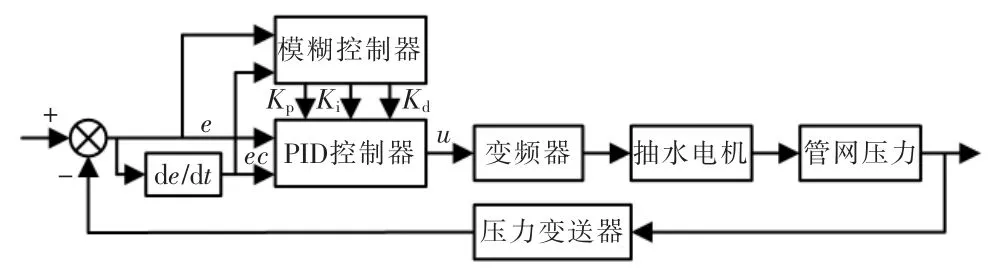
圖2 模糊PID 控制器結構Fig.2 Structure of fuzzy PID controller
2.2 灌溉管網系統模糊控制器設計
灌溉管網系統模糊控制器為雙輸入三輸出的二維模糊控制器[7],其輸入變量為壓力的偏差e 和偏差的變化率ec,輸出變量為Kp,Ki,Kd。
根據農藝要求,該灌溉系統管網的期望壓力值為45~55 kPa,根據專家和操作者的經驗,確定偏差e 的基本論域為[-5,5],偏差變化率ec 的基本論域為[-3,3],E 和EC 的論域等級定為{6,-5,- 4,-3,-2,-1,0,1,2,3,4,5,6}, 模糊子集為{NB,NM,NS,ZO,PS,PM,PB},其含義依次為負大、負中、負小、零、正小、正中、正大[8]。 即可以得到量化因子:Ke=1.2,Kec=2。輸入量選擇高斯形隸屬函數,輸入變量e和ec 的隸屬度函數如圖3 所示。
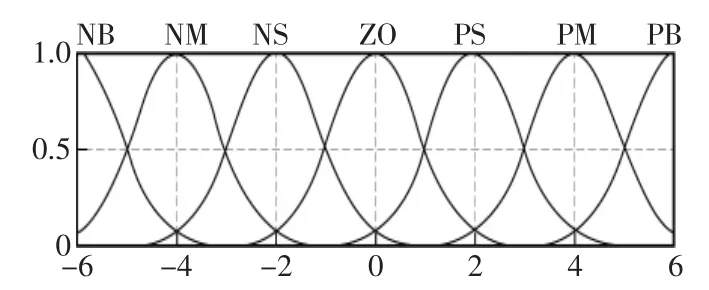
圖3 e 和ec 的隸屬函數Fig.3 e and ec membership functions
Kp,Ki,Kd的基本論域分別為(-0.6,0.6),(-0.9,0.9),(-3,3),輸出量所取得模糊子集的論域等級定為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊子集為{NB,NM,NS,ZO,PS,PM,PB},其含義依次為負大、負中、負小、零、正小、正中、正大。 因而,比例因子Kp=0.1,Ki=0.15,Kd=0.5,采用Mamdani 所提出的模糊化方法,輸出量選擇三角形隸屬函數[9]。 輸出變量Kp,Ki,Kd的隸屬度函數如圖4 所示。
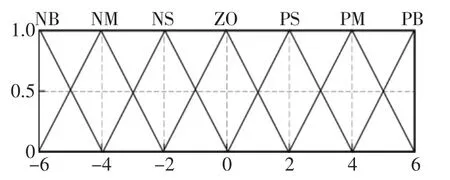
圖4 Kp,Ki,Kd 的隸屬函數Fig.4 Membership functions of Kp,Ki and Kd
2.3 模糊規則的編寫
根據專家和操作者所給出的灌溉經驗,可以得到PID 參數Kp,Ki,Kd的自整定規律。 當∣e∣較大時,應取較大的Kp和較小的Kd,這樣系統的響應速度會加快,且使Ki=0 可以避免出現超調;當∣e∣中等時,應取較小的Kp,這樣系統不容易出現超調,取適當的Ki和Kd(其取值對系統響應的影響較大);當∣e∣較小時,應取較大的Kp和Ki,這樣系統的穩態性能會提升,Kd的取值應適當,以避免在平衡點附近出現振蕩[10]。 根據這些規律得到的模糊規則見表1。
根據表1,可以歸納出以下49 條控制規則:
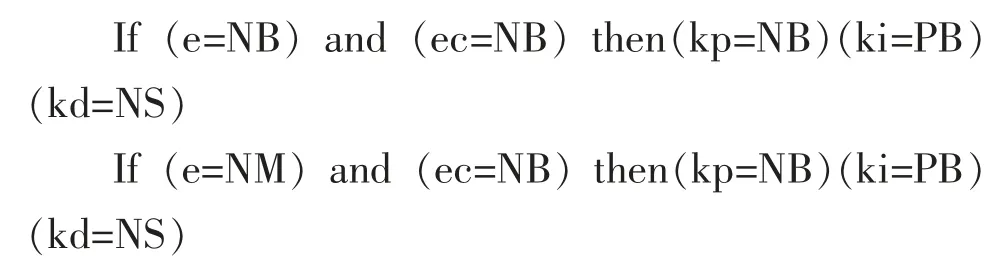

表1 ΔKp,ΔKi,ΔKd 的模糊規則Tab.1 Fuzzy rules of ΔKp,ΔKi,ΔKd

2.4 解模糊化
模糊推理得到的結果是一個模糊集合,不能直接用于調整PID 的參數,而實際模糊控制系統所得到的控制輸出信號必須是模糊論域中的精確量,因此需要對模糊集合進行解模糊。 在此,采用重心平均法進行解模糊化,其具有更平滑的推理控制,即使對應于輸入信號的微小變化,輸出也會發生變化。 即

式中:Xi為第i 個模糊輸出量;u(Xi)為第i 個模糊輸出量的隸屬度[11]。
3 系統的建模與仿真
3.1 系統建模
恒壓灌溉控制系統是一個滯后性、非線性、時變性的系統, 在仿真中需要將它近似為一個線性系統。 為驗證模糊PID 控制算法的有效性和實用性, 使用MatLab 中的Simulink 工具搭建系統模型。 采用模糊PID 控制和常規PID 控制的系統性能進行對比分析。 為便于研究,假設系統傳遞函數為1.2/(9.5s2+12.6s+1)-1,模糊PID 控制和常規PID 控制的系統階躍響應如圖5 所示[12]。

圖5 模糊PID 控制和常規PID 控制的仿真模型Fig.5 Simulation model of fuzzy PID control and conventional PID control
3.2 仿真結果分析
仿真結果如圖6 所示。 由圖可見,常規PID 控制,管網壓力的調節時間ts=8 s,超調量約為42%,穩態誤差ess=0;模糊PID 控制,調節時間ts=6 s,超調量約為20%,穩態誤差ess=0。 模糊PID 控制的調整時間可減少至6 s,超調量減小到20%,模糊PID控制器的響應更快,超調量小,控制效果更好。
4 結語

圖6 仿真結果Fig.6 Simulation results
針對云南省華寧縣柑橘種植基地的地形地貌特點,采取了模糊PID 和變頻調速相結合的控制策略,對管網系統的壓力進行實時調節。 該控制策略克服了普通PID 控制器的局限性和工頻啟動的缺陷性。設計了模糊PID 控制器;利用MatLab 軟件中的模糊控制工具箱和Simulink 對系統進行建模與仿真試驗,對模糊PID 控制方法和常規的PID 控制方法進行仿真對比。 仿真結果表明,模糊PID 控制器的響應更快,超調量小,控制效果更好。 模糊PID 和變頻調速控制策略應用于實際的柑橘種植基地,相比傳統的灌溉方式,每灌溉666.67 m2種植地可節水、節能分別達到35%和40%以上,且具有很好的經濟效益。該控制系統有很強的實用性和推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
自動化博覽(2014年12期)2014-02-28 22:34:39
