基于路面激勵自適應的液電饋能懸架動力學性能協調控制
2019-05-11 07:02:52汪若塵丁彥姝丁仁凱孟祥鵬
農業工程學報 2019年6期
汪若塵,丁彥姝,孫 東,丁仁凱,孟祥鵬
?
基于路面激勵自適應的液電饋能懸架動力學性能協調控制
汪若塵,丁彥姝,孫 東,丁仁凱,孟祥鵬
(江蘇大學汽車與交通工程學院,鎮江 212013)
針對液電式饋能懸架在被動模式下無法實現車輛全局工況最優,該文以路面激勵頻率作為切換閾值,設計了一種具有舒適、運動和綜合3種模式的液電式饋能懸架,在改善車輛乘坐舒適性及操縱穩定性的同時回饋振動能量。提出了將DC-DC變換器引入懸架饋能電路中,通過實時調節DC-DC變換器中MOS管開關信號占空比以改變液電式饋能減振器阻尼力,并制定了天棚-地棚控制結合模糊PID控制的雙環半主動控制方案。仿真結果表明,引入路面頻率自適應的液電式饋能懸架相比單一天棚-地棚控制懸架在車身共振區的車身加速度幅值減小22.92%,在車輪共振區的輪胎動載荷幅值減小24.27%,并回收66.70 W振動能量,實現了懸架動力學性能和饋能特性的協調控制。臺架試驗結果表明,各時段內車身加速度試驗與仿真結果峰峰值的相對誤差分別為1.36%、15.72%、4.86%和13.6%,輪胎動載荷的相對誤差分別為9.34%、13.62%、7.82%和15.47%;各頻段內車身加速度試驗與仿真結果峰值的相對誤差分別為7.55%、10.18%、10.56%、和6.35%,輪胎動載荷的相對誤差分別為9.64%、11.72%、10.39%和11.27%。時域和頻域的相對誤差均在16%之內,驗證了仿真結果的正確性和系統的可行性。研究結果可為液電式饋能懸架的產品升級提供參考。
車輛;懸架;控制;液電式饋能;雙環方案;多模式切換;路面頻率自適應
0 引 言
液電饋能懸架相比于被動懸架,不僅能回收利用懸架耗散的能量,實現節能,還能改善車輛動力學性能[1-6]。近年來,國內外學者對液電饋能懸架的改進進行了廣泛研究。Wendel等[7-9]提出一種低頻饋能型主動懸架系統,將減振器中的油液引出以驅動液壓馬達來回收能量。麻省理工學院[10]開發了一款集成式機-電-液饋能式減振器,該機構利用液壓能驅動馬達帶動微型電機發電。何仁等[11-13]提出一種新型液壓饋能型懸架,該結構將懸架振動過程中油液的壓力能儲存在蓄能器中,實現能量回收。張晗等[14-16]基于一種液電饋能式減振器結構,研究了饋能減振器非線性因素對示功特性的影響。張晗等[17]基于四分之一液電饋能式懸架,設計了半主動LQG控制器,雖提高了懸架的饋能功率,但犧牲了部分動力學性能。Nguyen等[18]將路面頻率自適應用于磁流變半主動懸架控制中,改善了車輛在全頻域路面上的行駛平順性和操作穩定性。
上述分析表明,國內外學者分別針對液電式饋能懸架和基于路面頻率自適應的半主動控制做了大量、深入的研究,但鮮有文獻能將兩者結合,實現懸架系統動力學性能和饋能特性的協調控制。此外,車輛的乘坐舒適性與操作穩定性存在相互制約的關系,二者在懸架單一模式控制下的矛盾問題仍然突出[19-20]。
針對上述問題,本文基于改進的液電饋能懸架,引入路面頻率自適應模塊,以路面激勵頻率作為切換閾值,設計了舒適、運動和綜合3種工作模式,基于饋能電路制定了雙環半主動控制方案,以實現液電式饋能懸架的動力學性能和饋能特性的協調控制,并進行臺架試驗驗證模型和控制方法的有效性。
1 液電饋能懸架
1.1 懸架結構與工作原理
液電饋能懸架結構如圖1所示,液電饋能減振器取代傳統減振器,為系統提供阻尼力。液電饋能減振器由液壓缸、液壓整流橋、液壓馬達、蓄能器、液壓管路、旋轉電機等組成,其中,液壓整流橋由4個單向閥構成[21]。饋能電路部分由DC-DC變換器與超級電容組成,直流電機的輸出端與DC-DC變換器相連,具體結構如圖2所示。當懸架受到路面沖擊時,液壓缸上下腔之間的油液形成交互、往復流動的油液驅動馬達旋轉最終帶動電機工作產生電能并儲存起來,從而回收部分懸架振動能量。
1.2 動力學建模
液電饋能懸架二自由度動力學模型如圖3所示。
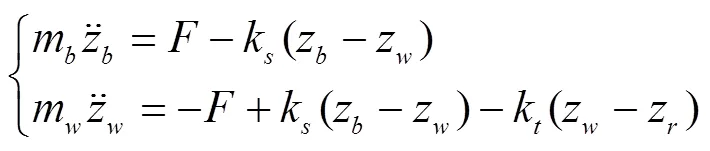
液電饋能式懸架的運動學微分方程為
路面輸入模型為

式中0為下截止頻率,Hz;()為數學期望為0的高斯白噪聲;0為路面不平度系數,m3;為車速,m/s。
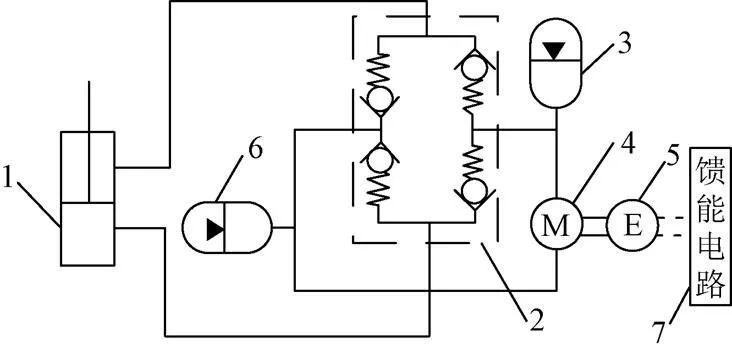
1.液壓缸 2.液壓整流橋 3.蓄能器a 4.液壓馬達 5.旋轉電機 6.蓄能器b 7.饋能電路

圖2 饋能電路原理圖

注:mb為簧載質量,kg;mw為非簧載質量,kg;ks為懸架彈簧剛度,kN·m-1;kt為輪胎剛度,kN·m-1;F為液電饋能減振器阻尼力,N;zb、zw和zr分別為車身垂直位移、車輪垂直位移以及路面輸入位移,m。
Fig3. Two-degree-of-freedom dynamic model of hydraulic electrical energy-regenerative suspension
1.3 液電饋能減振器阻尼力計算
液電饋能減振器的阻尼力包括2部分,即油液流過液壓元件產生的阻力F和發電機產生的電磁阻尼力F。
若液壓元件產生的等效阻尼為c,則
液壓馬達在油液壓力下工作,輸出轉矩以驅動電機旋轉,從而完成系統內油液壓力能向機械能的轉換。液壓馬達的轉速、轉矩T可表示為

式中n為液壓馬達轉速,r/min;為系統流量,m3/min;q為液壓馬達排量,m3/r;η為容積效率;Δp為油液經過馬達產生的壓降,Pa;η為機械效率。此外,發電機產生的感應電動勢與輸入轉矩為


因為液壓馬達與發電機同軸聯接,故二者轉速相同,轉矩相等。油液經過液壓馬達產生的壓降可表示為
發電機產生的電磁阻尼力F可表示為馬達壓降與截面積(m2)的乘積。
所以,液電饋能減振器的輸出力為

2 半主動控制方案
液電饋能懸架的半主動控制基于饋能電路實現。饋能電路的DC-DC變換器可工作于Boost(升壓)和Buck(降壓)2種模式[22]。S1恒通,S2斬波時,DC-DC變換器處于Boost模式;S1斬波,S2斷開時,DC-DC變換器處于Buck模式。Boost模式和Buck模式下的等效電路分別如圖4所示。
MOS管1個開關周期內信號的占空比決定了饋能電路電流的大小。升壓模式和降壓模式下電流的穩態值分別如式(10)、式(11)所示。


汽車行駛時的路面激勵頻率一般分布在0~25 Hz之間,在該頻帶范圍內,懸架振動存在低頻車身型振動和高頻車輪型振動2種現象。根據懸架系統在不同路面頻率下的性能需求所制定的液電饋能半主動懸架工作模式、工作頻帶與控制目標如表1所示。
懸架的半主動控制方案如圖5所示,該方案為雙環結構,其中,內環為天棚-地棚控制[23-24],外環為模糊PID控制[25-27]。系統根據路面信號識別路面頻率,確定懸架的工作模式,調整內環控制的天棚與地棚阻尼系數,實時計算饋能減振器理想阻尼力U與實際阻尼力的差值以作為輸入信號傳送給外環控制器,模糊PID控制輸出合適的DC-DC變換器MOS管開關信號占空比,來實時調節電路中的電流,最終實現懸架的半主動控制。此外,卡爾曼濾波器的作用是估計車身和輪胎的絕對速度,為內環天棚-地棚控制提供懸架狀態變量。
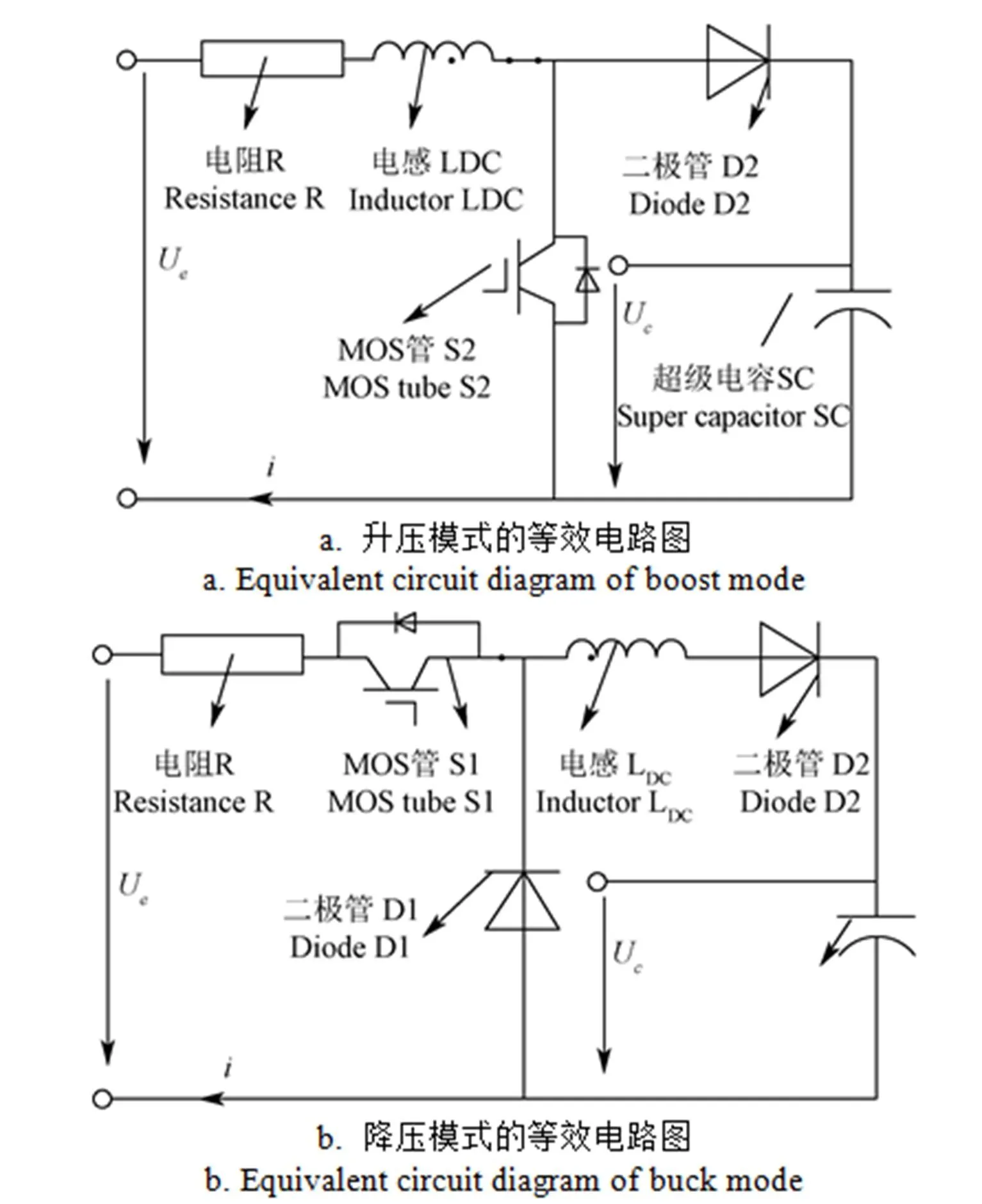
注:Ue為DC-DC變換器兩端電壓,V;Uc為超級電容兩端電壓,V;i為DC-DC變換器電流,A。

表1 半主動控制的工作模式

圖5 路面頻率自適應半主動控制方案
2.1 天棚-地棚阻尼系數優化設計
內環天棚-地棚控制計算出的饋能減振器理想阻尼力U可表示為

式中c和c分別為天棚阻尼和地棚阻尼系數,N·s/m。
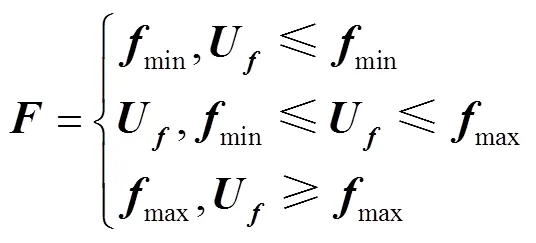
液電饋能減振器可提供的阻尼力大小受阻尼力可調范圍的限制。min和max分別為減振器可提供的最小和最大阻尼力,則減振器的阻尼力為
為確定理想阻尼力U,需要得到各工作模式下的天棚阻尼系數c和地棚阻尼系數c。Robert在文獻[28]中提出了一種針對線性時不變系統,使次優控制策略效果接近最優控制策略的實現方案。對于1/4懸架系統,LQG(linear quadratic gaussian)控制是最優控制策略[29]。其性能指標的定義如式(14)所示。

式中1、2和3分別為輪胎動位移、懸架動行程和車身加速度平方的加權系數;為采樣時間,s。1、2和3的取值由遺傳算法[30-31]確定,各模式的適應度函數如下:
舒適模式

式中BA是被動懸架的車身加速度峰峰值,m/s2;BA是LQG控制懸架的車身加速度峰峰值,m/s2。
運動模式

式中DTD是被動懸架的輪胎動位移峰峰值,m;DTD是LQG控制懸架的輪胎動位移峰峰值,m。
綜合模式

經過遺傳算法優化,液電饋能半主動懸架各模式對應的LQG控制加權系數如表2所示。
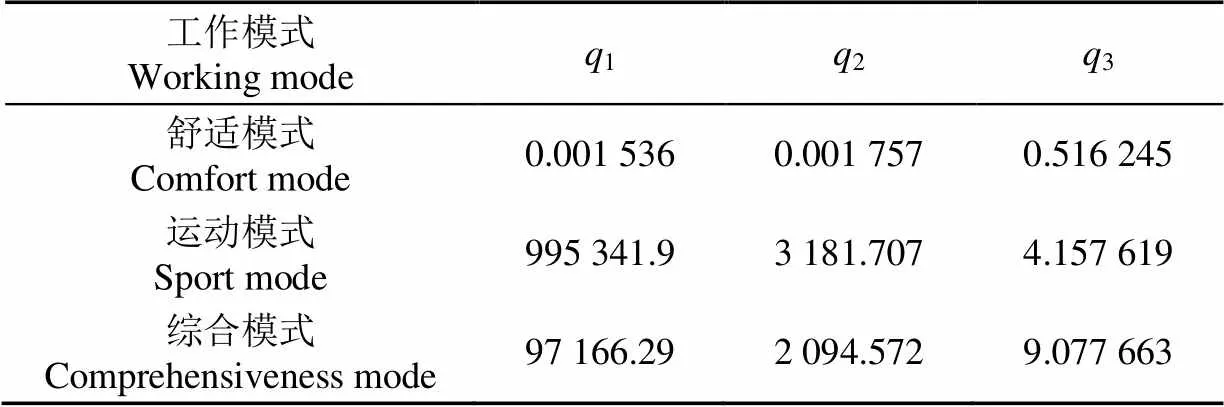
表2 懸架各工作模式對應的加權系數
注:1為輪胎動位移加權系數;2為懸架動行程加權系數;3為車身加速度平方加權系數。
Note:1is the dynamic displacement weighting coefficient of tyre;2is the weighting coefficient of suspension;3is the weighting coefficient of body acceleration square.
半主動控制方案中,內環天棚-地棚控制器的輸入變量,即次優控制的測量變量為
令
式中為轉換矩陣,且

使用系統測量變量計算最優控制力

式中為次優控制反饋增益矩陣;為天棚-地棚阻尼系數矩陣,即
次優控制反饋增益矩陣的近似解可以利用最小范數法求出,首先,構造目標函數
要使和接近,該目標函數應盡可能小,則近似解為

天棚-地棚阻尼系數矩陣為
優化后的各模式天棚-地棚阻尼系數如表3所示。
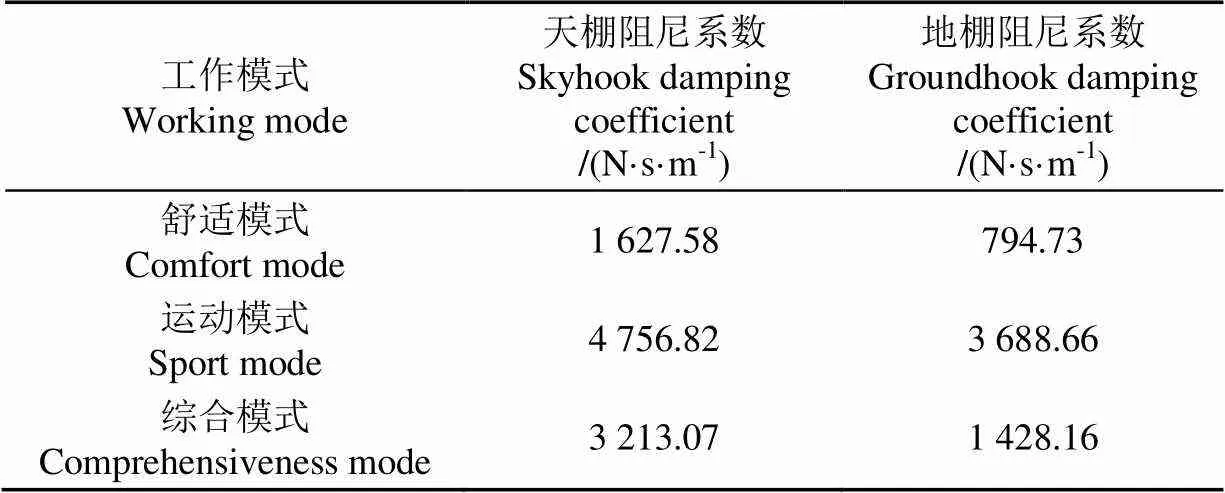
表3 優化后的天棚-地棚阻尼系數
2.2 狀態估計
液電饋能減振器在半主動控制下輸出的阻尼力為

選取系統狀態變量為
則將式(1)表示成狀態方程的形式,即為

式中=()為高斯輸入,矩陣和為

式中0為路面下截止頻率,Hz。
觀測矩陣為
以隨機路面工況為例,仿真分析卡爾曼濾波器的狀態估計效果。仿真參數設置如表4所示。

表4 懸架系統仿真參數
在卡爾曼濾波器估計精度趨于穩定時,各狀態變量估計效果如圖6所示。可以看出,卡爾曼濾波器對車身絕對速度和車輪絕對速度的估計較為準確。
2.3 路面頻率識別
本文采用一階過零檢測法估計路面輸入的頻率,即利用路面輸入的速度譜信號,通過檢測其過零點的方式,對當前路面進行頻率估計。一階過零檢測法原理如圖7所示。
則當前的路面輸入頻率可以表示為

2.4 模糊PID阻尼力跟蹤控制器設計
本文模糊控制器選擇二維模糊控制器,輸入信號為理想阻尼力U和實際阻尼力的差值及其變化率,基本論域均為[-6,6]。其輸出信號為PID控制器的系數修正量ΔK、ΔK和ΔK,基本論域也均設置為[-6,6]。輸入和輸出變量的模糊語言值選定為{NB(負大),NM(負中),NS(負小),ZE(零),PS(正小),PM(正中),PB(正大)};隸屬度函數選擇三角型,并制定合適的模糊規則。
圖8顯示了液電饋能半主動懸架系統的實際阻尼力對理想阻尼力的跟蹤效果,跟蹤精度計算公式如下:

注:ta為當前時間段內速度信號第一個零點處的時刻,s;tb為第三個零點處時刻,s;A1~A4分別為當前路面信號速度譜上的4個點。
根據式(26)的計算方法對圖8所示的仿真數據進行阻尼力跟蹤精度計算,結果為98.23%,表明阻尼力跟蹤效果較高。
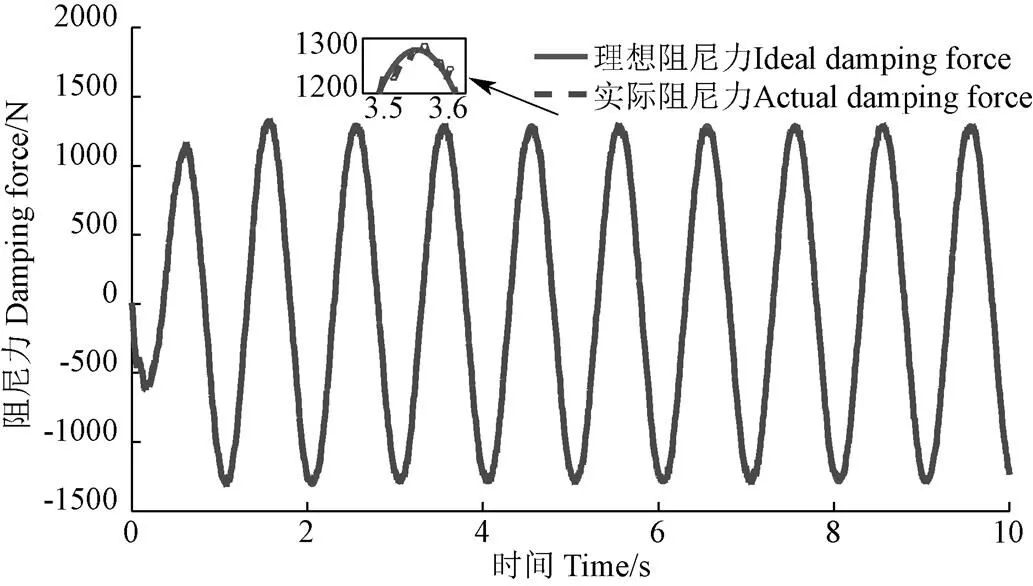
圖8 阻尼力跟蹤效果
3 仿真分析
為驗證路面頻率自適應液電饋能懸架在全局工況下協調動力學性能和饋能特性的優越性,本節仿真分析了分段正弦路面下被動懸架、單一天棚地棚控制液電饋能懸架和路面頻率自適應液電饋能懸架的動力學性能和饋能特性,選取的路面信息如表5所示。
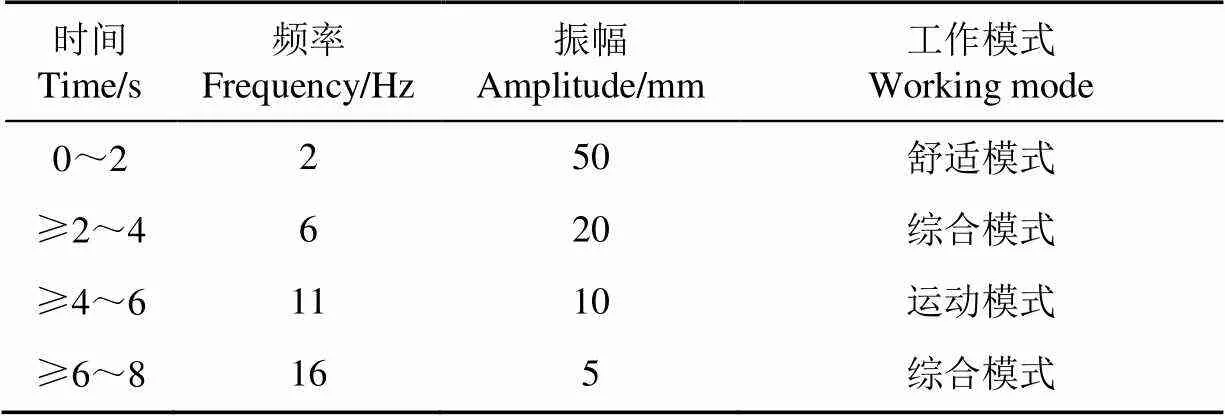
表5 分段正弦路面參數
3種懸架動態性能的時域仿真結果如圖9所示。參考文獻[32],采用峰峰值(peak-to-peak, PTP)的評價方法分析懸架動力學性能的時域響應,計算公式如下:

式中()表示系統響應輸出;為時間,s。
根據式(27)的計算方法對圖9所示的仿真數據進行峰峰值計算,分段正弦路面懸架動力學性能響應輸出的峰峰值見表6。
由圖9a、9b和表6可知:1)0~2 s內,單一天棚-地棚控制懸架的車身加速度峰峰值相比被動懸架減小了11.3%,而路面自適應懸架此時工作在舒適模式,車身加速度比單一控制懸架減小了13.75%,車輛乘坐舒適性得到顯著改善;2)4~6 s內,單一天棚-地棚控制懸架的輪胎動載荷相比被動懸架減小了16.89%,此時路面自適應懸架工作在運動模式,輪胎動載荷相比單一控制懸架減小17.76%,操縱穩定性大大提高。計算結果說明路面頻率自適應懸架的性能要優于單一天棚-地棚控制懸架,能夠解決車輛全局工況下操作穩定性和行駛平順性的矛盾問題;3)2~4 s和6~8 s內,單一天棚-地棚懸架的車身加速度和輪胎動載荷較被動懸架分別減小了15.42%、21.08%和6.73%、5.95%,此時路面自適應懸架工作在綜合模式,其動力學性能比單一天棚-地棚懸架分別減小了6.6%、19.31%和23.27%、3.23%,操縱穩定性和乘坐舒適性都明顯改善。
3種控制方法的懸架動力學性能幅頻特性對比結果如圖10所示,以各頻段內的峰值進行分析,結果如表7所示,由表7可知:1)0~5 Hz頻段內各指標幅值的峰值出現在2 Hz(下同),此時單一天棚-地棚懸架控制的車身加速度峰值比被動懸架控制減小10.61%,但輪胎動載荷增加了11.25%。而路面自適應懸架工作在舒適模式,車身加速度較被動懸架減小31.07%,輪胎動載荷也減小14.17%,車輛行駛平順性得到顯著提升而操縱穩定性并無惡化;2)11 Hz路面頻率下,單一天棚-地棚懸架控制的輪胎動載荷較被動懸架控制減小14.85%,但車身加速度增加18.49%。此時路面自適應懸架工作在運動模式,其輪胎動載荷較被動懸架控制減小了35.52%,車身加速度也減小了10.93%,車輛操縱穩定性得到顯著提升而行駛平順性沒有惡化;3)6 和16 Hz激勵時,單一天棚-地棚懸架控制的車身加速度和輪胎動載荷較被動懸架控制分別減小了10.48%、15.62%和2.27%、10.27%。此時路面自適應懸架工作在綜合模式,其車身加速度和輪胎動載荷比單一天棚-地棚懸架控制減小了6.78%、18.09%和8.18%、14.18%。

圖9 3種懸架控制方法的動態性能時域仿真結果
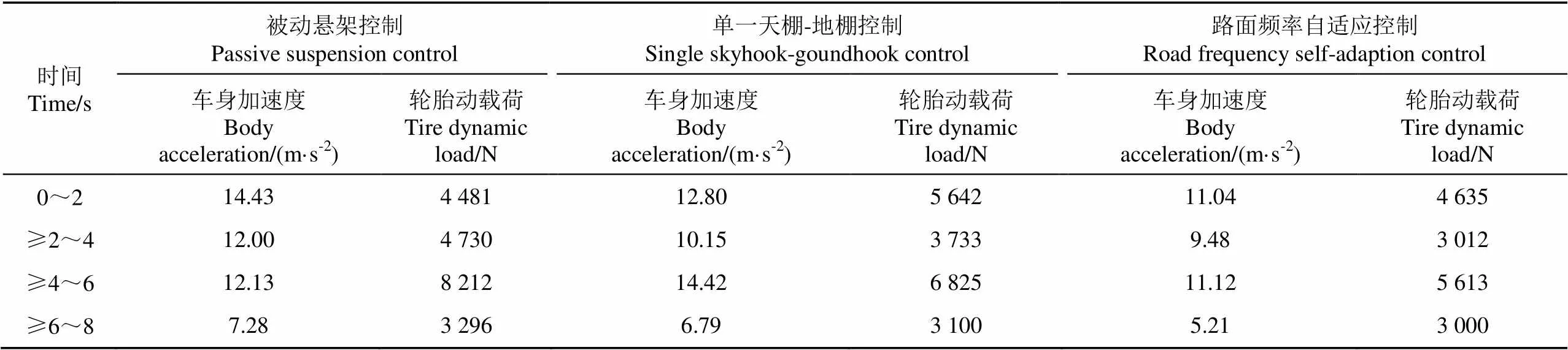
表6 3種懸架控制方法的動力學性能指標峰峰值對比
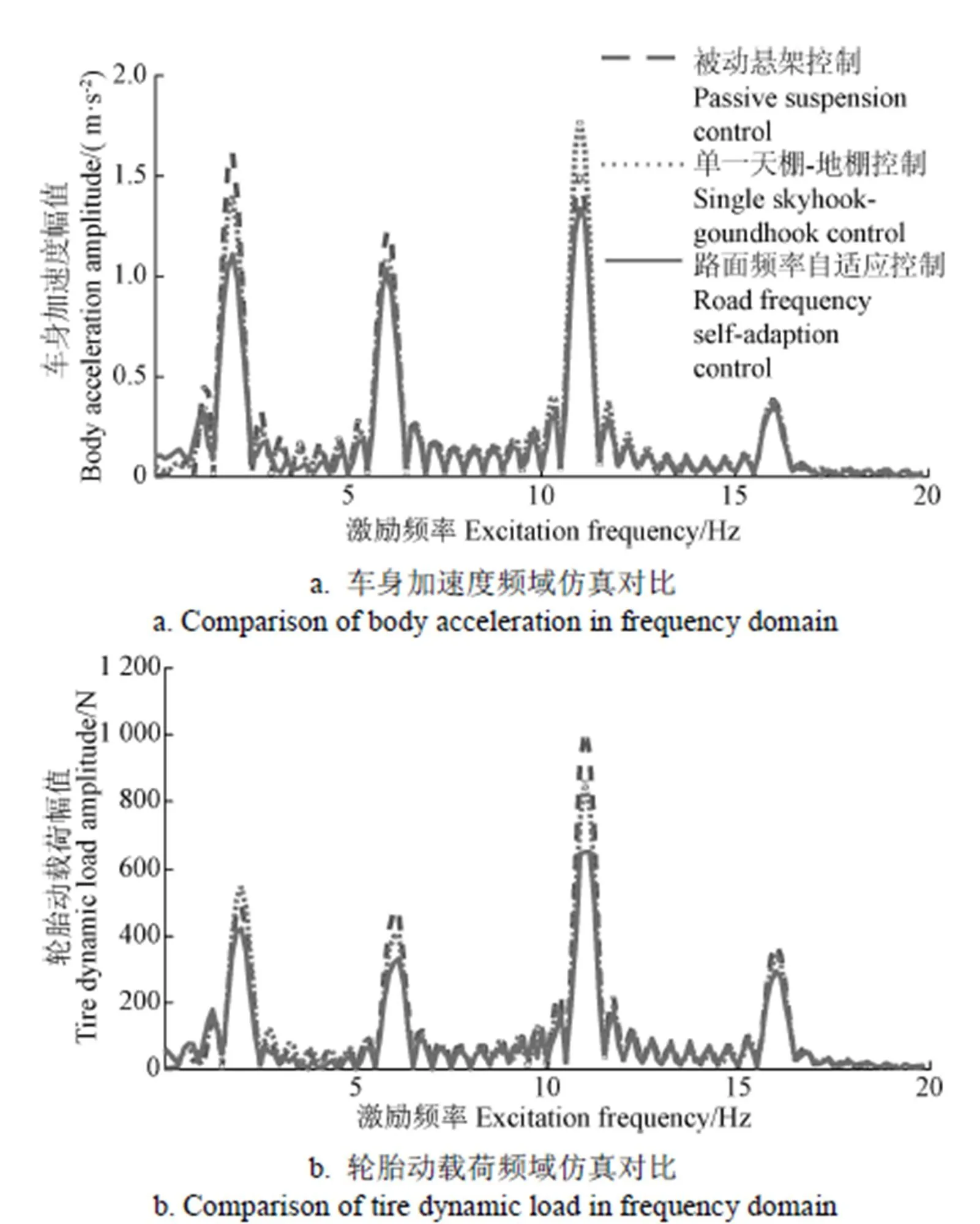
圖10 3種懸架控制方法的動力學性能幅頻特性對比Fig.10 Amplitude frequency characteristic comparison of dynamic performance of three suspension control methods
由圖9c可知:1)從能量守恒角度,懸架動力學性能改善越明顯,回收的能量必定越少。路面頻率自適應懸架在4種路面下的動力學性能均優于單一天棚-地棚控制,因此其平均饋能功率也均小于單一天棚-地棚控制;2)0~2 s和4~6 s分別為車身和車輪共振頻段,懸架振動劇烈,因此饋能懸架回收的能量較大。由表8統計數據可知:此時路面頻率自適應懸架控制的平均饋能功率較單一天棚-地棚控制分別減小了10.52%和8.5%;3)2~4 s和6~8 s時,路面自適應懸架處于綜合模式,同時優化了車身加速度和輪胎動載荷,因此饋能功率遠小于單一控制懸架。但這2個頻段的饋能功率基體很小,因此對懸架全局工況的饋能性能影響不大。4)全局工況下,路面自適應懸架控制的饋能功率較單一天棚-地棚控制降低12.9%。
綜上所述,單一天棚-地棚控制的液電饋能懸架不能根據路面頻率自適應地切換工作模式,無法解決車輛在全局工況下操作穩定性和乘坐舒適性的矛盾問題。而本文設計的路面頻率自適應液電饋能懸架控制在各頻率下的車身加速度和輪胎動載荷均優于單一天棚-地棚懸架控制,且全局饋能功率只減小了12.9%,實現了懸架系統動力學性能和饋能特性的協調控制。

表7 各頻段內3種懸架控制方法的動力學性能指標峰值對比
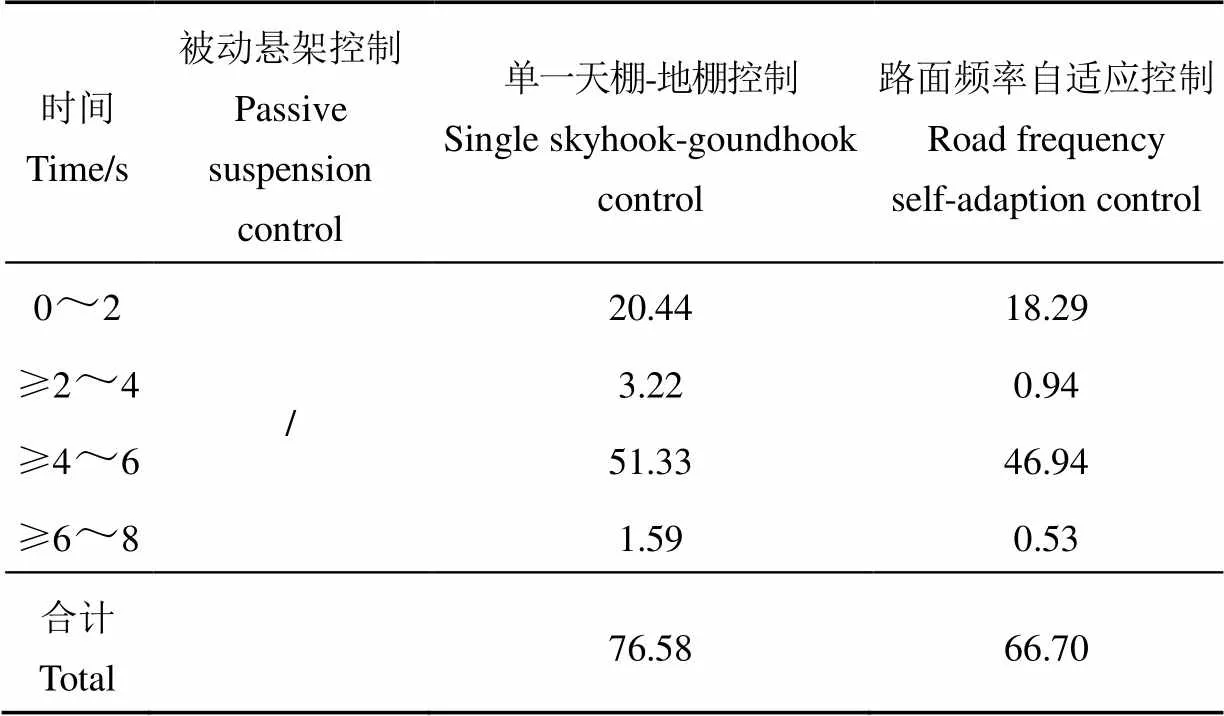
表8 3種懸架控制方法的饋能功率均方根值
4 驗證試驗
為驗證液電饋能半主動懸架動力學性能及饋能特性,試制了液電饋能減振器原理樣機,搭建了四分之一懸架試驗臺,進行了臺架試驗,臺架布置如圖11所示。
試驗系統的主要儀器設備包括:INSTRON公司研發生產的8800型單通道數控液壓伺服激振臺;PCB公司的3711E1110G和3711E1150G型加速度傳感器;LMS公司研發生產的LMS數據采集系統;dSPACE硬件平臺以及饋能電路。
在激振臺上對四分之一液電饋能懸架進行分段正弦路面激勵,設定車速為72km/h,選取的路面信息與仿真相同,動力學性能試驗結果如表9和圖12、圖13所示。
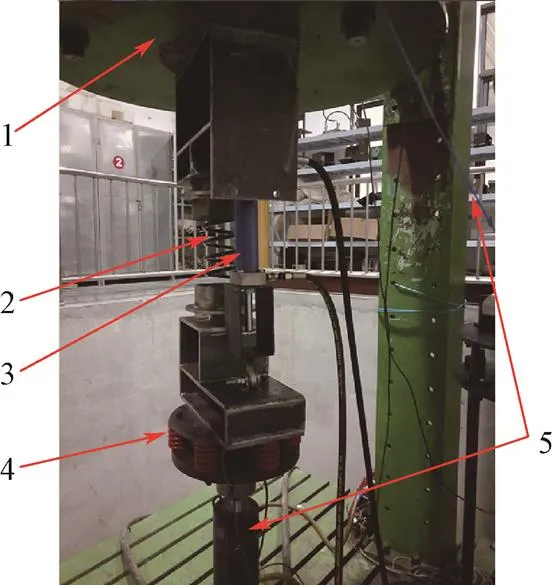
1.簧載質量 2.懸架彈簧 3.液電饋能減振器 4.輪胎等效彈簧 5.加速度傳感器
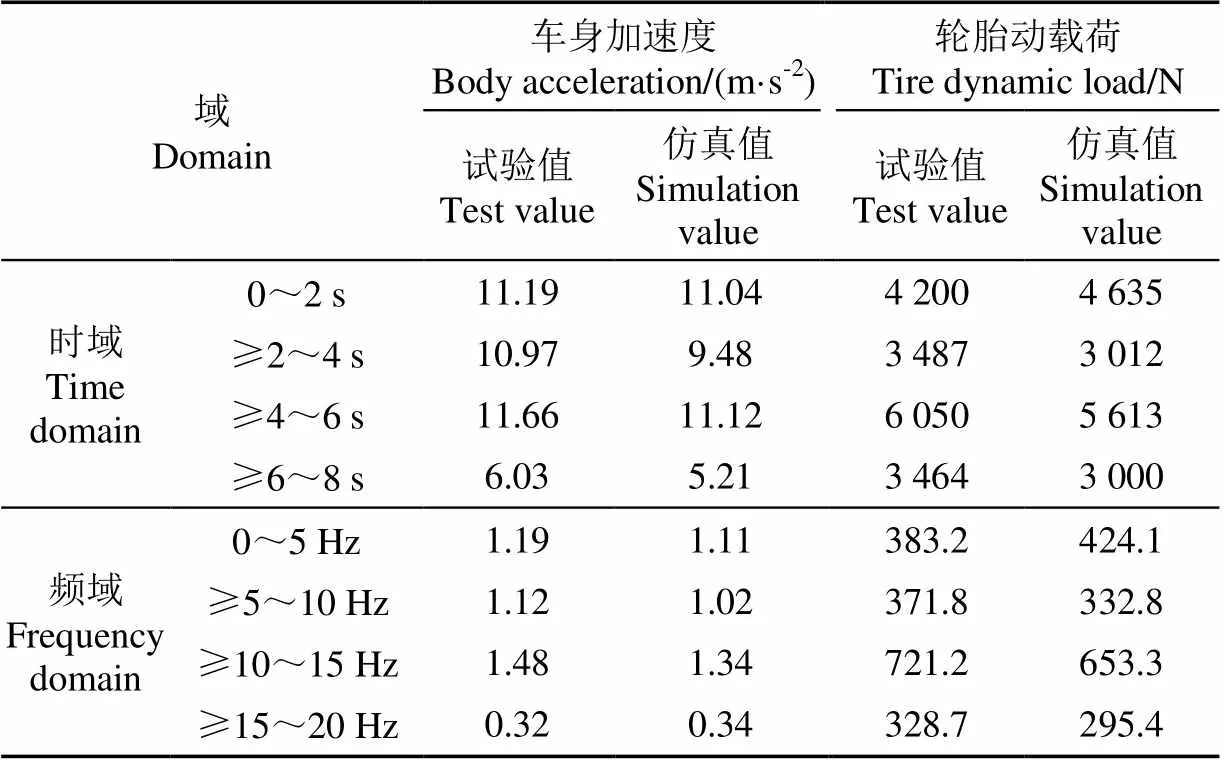
表9 試驗結果與仿真結果對比

圖12 懸架動態性能試驗與仿真結果時域對比
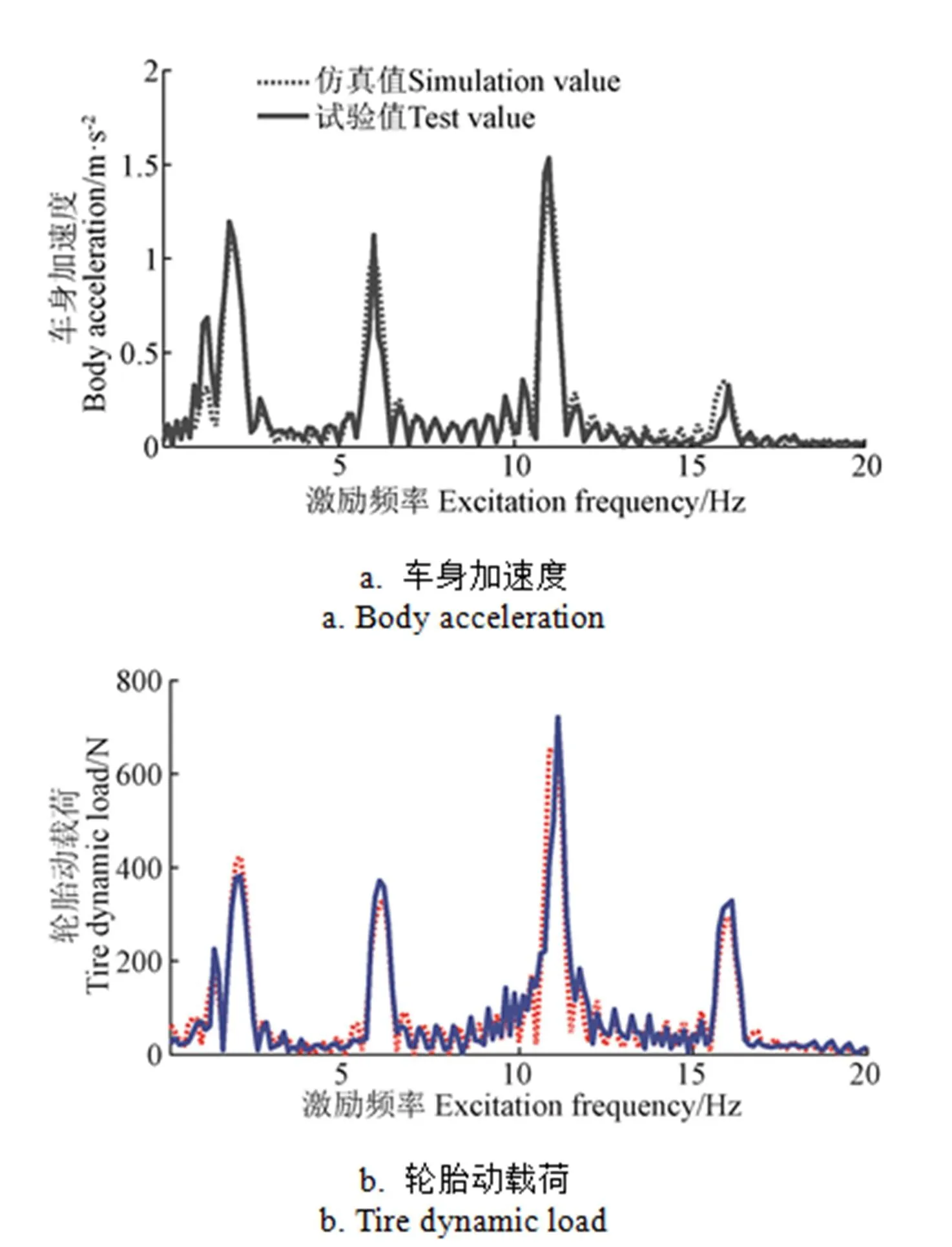
圖13 懸架動力學性能幅頻特性的試驗與仿真結果對比 Fig.13 Comparison of test and simulation results of amplitude frequency characteristics of suspension dynamic performance
由圖12和表9可知,各時段內,車身加速度試驗與仿真結果峰峰值的相對誤差分別為1.36%、15.72%、4.86%和13.6%;輪胎動載荷的相對誤差分別為9.34%、13.62%、7.82%和15.47%。由圖13和表9可知,各頻段內車身加速度試驗與仿真結果峰值的相對誤差分別為7.55%、10.18%、10.56%、和6.35%;輪胎動載荷的相對誤差分別為9.64%、11.72%、10.39%和11.27%。時域和頻域所有的相對誤差均在16%之內,驗證了仿真結果的正確性。
由圖12c和表10可知,由于管路損耗的存在,試驗中回收的能量相比于仿真結果較少,全局饋能功率的相對誤差為17.72%。試驗與仿真的結果均表明,舒適模式與運動模式饋能較多,而綜合模式幾乎無能量回收。

表10 饋能功率試驗與仿真結果的均方根值
5 結 論
1)本文將DC-DC變換器引入液電饋能懸架的饋能電路,通過實時調節變換器中MOS管占空比,可以實現液電饋能減振器實際阻尼力對理想阻尼力的精確跟蹤,進而改善控制效果。
2)以路面激勵頻率為閾值,劃分了舒適模式、安全模式和綜合模式3種懸架工作模式。仿真結果表明,時域分析中,舒適模式下的液電饋能半主動懸架的車身加速度峰峰值比單一天棚-地棚控制懸架減小13.75%,比被動懸架減小23.49%;運動模式的輪胎動載荷峰峰值比單一控制懸架減小17.76%,比被動懸架減小31.65%;綜合模式的車身加速度與輪胎動載荷均優于單一控制和被動控制懸架。頻域分析中,舒適模式的車身加速度幅值峰值比單一控制懸架減小22.92%,比被動懸架減小31.07%;運動模式的輪胎動載荷峰值比單一控制懸架減小24.27%,比被動控制懸架減小35.52%;綜合模式的車身加速度與輪胎動載荷也均優于單一控制懸架和被動控制懸架。
3)試驗結果與仿真結果誤差不超過16%,證明了基于路面頻率自適應的液電饋能半主動懸架控制能夠實現車輛全局工況性能最優,協調控制懸架系統的動力學性能和饋能特性。
[1] Xu Lin, Guo Xuexun. Hydraulic transmission electromagnetic energy-regenerative active suspension and its working principle[C]// International Workshop on Intelligent Systems and Applications. IEEE, 2010: 1-5.
[2] Fang Zhigang, Guo Xuexun, Xu Lin, et al. Researching on valve system of hydraulic electromagnetic energy-regenerative shock absorber[J]. Applied Mechanics & Materials, 2012(157/158): 911-914.
[3] Fang Zhigang, Guo Xuexun, Xu Lin, et al. Experimental Study of Damping and Energy Regeneration Characteristics of a Hydraulic Electromagnetic Shock Absorber[J]. Advances in Mechanical Engineering, 2013, http://journals.sagepub. com/doi/10.1155/2013/943528.
[4] 彭明,過學迅,張杰,等. 基于液電饋能式懸架的整車道路仿真研究[J]. 機械設計,2015,32(8):12-16.
Peng Ming, Guo Xuexun, Zhang Jie, et al. Vehicle road test simulation based on the hydraulic electromagnetic energy-regenerative suspension[J]. Journal of Machine Design, 2015, 32(8):12-16. (in Chinese with English abstract)
[5] Guo S, Chen Z, Guo X, et al. Vehicle Interconnected Suspension System based on Hydraulic Electromagnetic Energy Harvest: Design, Modeling and Simulation Tests[C]// SAE Commercial Vehicle Engineering Congress, 2014: 192-202.
[6] Lin X, Bo Y, Guo X, et al. Simulation and performance evaluation of hydraulic transmission electromagnetic energy-regenerative active suspension[C]// Intelligent Systems. IEEE, 2011: 58-61.
[7] Wendel G R , Stecklein G L . A regenerative active suspension system[C]// SAE Publication SP-861, Michigan, 1991: 129-135.
[8] Wendel G R, Steiber J, Stecklein G L. Regenerative active suspension on rough terrain vehicles[J]. Journal of Commercial Vehicle, 1994, 103(2): 20-30.
[9] Wendel G R. Development of a retractable compressible fluid suspension system. task 1[R]. Texas: Southwest Research Inst San Antonio, 1988.
[10] 電子發燒友網工程師. 盤點2009最具創意的汽車電子產[EB/OL].(2009-1-14).[2009-12-23].http://www.elecfans.com/qichedianzi/154522.html
[11] 何仁,陳士安,陸森林. 饋能型懸架的工作原理與結構方案評價[J]. 農業機械學報,2006,37(5):5-9. He Ren, Chen Shi’an, Lu Senlin. Operation theory and structure evaluation of reclaiming energy suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(5): 5-9. (in Chinese with English abstract)
[12] 陳士安,何仁,陸森林. 饋能型懸架綜合性能評價體系[J]. 農業機械學報,2006,37(7):14-18. Chen Shi’an, He Ren, Lu Senlin. Evaluating system of reclaiming energy suspension comprehensive performance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(7): 14-18. (in Chinese with English abstract)
[13] 陳士安,何仁,陸森林. 新型饋能型懸架及其工作原理[J]. 機械工程學報,2007,43(11):177-182. Chen Shi’an, He Ren, Lu Senlin. New reclaiming energy suspension and its working principle[J]. Chinese Journal of Mechanical Engineering, 2007, 43(11): 177-182. (in Chinese with English abstract)
[14] 張晗,過學迅,方志剛,等. 饋能式懸架能量回收潛力試驗研究[J]. 振動.測試與診斷,2015,35(2):225-230. Zhang Han, Guo Xuexun, Fang Zhigang, et al. Potential energy harvesting analysis and test on energy-regenerative suspension system[J]. Journal of Vibration Measurement & Diagnosis, 2015, 35(2): 225-230. (in Chinese with English abstract)
[15] 張晗,過學迅,徐琳,等. 液電式饋能減振器外特性仿真與試驗[J]. 農業工程學報,2014,30(2):38-46. Zhang Han, Guo Xuexun, Xu Lin, et al. Simulation and test for hydraulic electromagnetic energy-regenerative shock absorber[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(2): 38-46. (in Chinese with English abstract)
[16] Guo X, Hu S, Fang Z. The ride comfort and energy-regenerative characteristics analysis of hydraulic-electricity energy regenerative suspension[J]. Journal of Vibroengineering, 2016, 18(3): 1765-1782.
[17] 張晗,過學迅,胡三寶,等. 液電式饋能半主動懸架控制特性仿真分析與能量回收驗證[J]. 農業工程學報,2017,33(16):64-71. Zhang Han, Guo Xuexun, Hu Sanbao, et al. Simulation analysis on hydraulic-electrical energy regenerative semi-active suspension control characteristic and energy recovery validation test[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 64-71. (in Chinese with English abstract)
[18] Nguyen L H, Hong K S, Park S . Road-frequency adaptive control for semi-active suspension systems[J]. International Journal of Control, Automation, and Systems, 2010, 8(5): 1029-1038.
[19] 汪若塵,葉青,孫澤宇,等. 液壓互聯ISD懸架系統模式切換研究[J]. 機械工程學報,2017,53(6):110-115. Wang Ruochen, Ye Qing, Sun Zeyu, et al. A study of the hydraulically interconnected inerter-spring-damper suspension system[J]. Journal of Mechanical Engineering, 2017, 53(6): 110-115. (in Chinese with English abstract)
[20] 汪若塵,馬曉煒,丁仁凱,等. 基于模型參考的混合懸架多模式切換控制研究[J]. 農業機械學報,2017,48(7):353-360.Wang Ruochen, Ma Xiaowei, Ding Renkai, et al. Multi-mode switching control system for hybrid suspension based on model reference[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 353-360. (in Chinese with English abstract)
[21] Hedlund J D. Hydraulic regenerative vehicle suspension [D]. Minnesota: Univ. of Minnesota, 2010.
[22] 汪若塵,蔣秋明,葉青,等. 液壓互聯饋能懸架特性分析與試驗[J]. 農業機械學報,2017,48(8):350-357.Wang Ruochen, Jiang Qiuming, Ye Qing, et al. Characteristics analysis and experiment of hydraulic interconnected energy-regenerative suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 350-357. (in Chinese with English abstract)
[23] 郭孔輝,王金珠,郭耀華,等. 基于混合阻尼控制的車輛半主動懸架可調性研究[J]. 汽車技術,2013(3):1-5. Guo Konghui, Wang Jinzhu, Guo Yaohua, et al. Study on the adjustability of semi-active suspension based on hybrid damping control[J]. Automobile Technology, 2013(3): 1-5. (in Chinese with English abstract)
[24] 江洪,劉如奎. 磁流變半主動空氣懸架混合天地棚控制策略研究[J]. 科學技術與工程,2014,14(28):135-139. Jiang Hong, Liu Rukui. Research on the mixed sky-hook and ground-hook control strategy based on magneto-rheological semi-active air suspension[J]. Science Technology & Engineering, 2014, 14(28): 135-139. (in Chinese with English abstract)
[25] 郭全民,雷蓓蓓. 半主動懸架PID控制的研究和優化[J]. 國外電子測量技術,2015,34(4):60-63. Guo Quanmin, Lei Beibei. Research and optimization for semi-active suspension PID control[J]. Foreign Electronic Measurement Technology, 2015, 34(4): 60-63.. (in Chinese with English abstract)
[26] Mouleeswaran S. Development of active suspension system for automobiles using PID controller[C]// International conference of mechanical engineering. 2008: 2266-2270.
[27] Caponetto R, Diamante O, Fargione G, et al. A soft computing approach to fuzzy sky-hook control of semiactive suspension[J]. IEEE Transactions on Control Systems Technology, 2003, 11(6): 786-798.
[28] Kosut R. Suboptimal control of linear time-invariant systems subject to control structure constraints[J]. IEEE Transactions on Automatic Control, 2003, 15(5): 557-563.
[29] 鄭玲,鄧兆祥,李以農. 基于電流變減振器的汽車半主動懸架最優控制[J]. 重慶大學學報,2003,26(7):1-5. Zheng Ling, Deng Zhaoxiang, Li Yinong. Optimal control of semi-active suspensions with ER shock absorber[J]. Journal of Chongqing University, 2003. (in Chinese with English abstract)
[30] 趙陽,王興貴,狄長春,等. 基于神經網絡和遺傳算法的懸掛系統優化設計[J]. 計算機測量與控制,2005,13(10):1083-1084. Zhao Yang, Wang Xinggui, Di Changchun, et al. Optimal design of suspension system based on bp network and genetic algorithm[J]. Computer Automated Measurement & Control, 2005. (in Chinese with English abstract)
[31] 潘云偉,胡啟國,羅天洪,等. 基于遺傳算法的懸架系統的優化和仿真[J]. 重慶交通大學學報:自然科學版,2013,32(5):1068-1070. Pan Yunwei, Hu Qiguo, Luo Tianhong, et al. Simulation and optimization of suspension system based on genetic algorithm[J]. Journal of Chongqing Jiaotong University: Natural Science, 2013, 32(5): 1068-1070. (in Chinese with English abstract)
[32] 聶佳梅,張孝良. 車輛被動天棚阻尼懸架系統臺架試驗[J]. 農業工程學報,2015,31(7):66-71. Niu Jiamei, Zhang Xiaoliang. Experiment of vehicle passive skyhook damping suspension system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(7): 66-71. (in Chinese with English abstract)
Dynamic performance coordination control of hydraulic electrical energy-regenerative suspension based on road excitation self-adaptation
Wang Ruochen, Ding Yanshu, Sun Dong, Ding Renkai, Meng Xiangpeng
(,,212013,)
Compared with the passive suspension, the hydraulic electrical energy-regenerative suspension can not only recycle the energy dissipated by the suspension, but also improve the dynamic performance of vehicle, which has attracted extensive attention of scholars at domestic and abroad. However, the most of research focuses on the analysis of energy-feedback characteristics,without considering how to improve the dynamic performance of vehicles adaptively according to complex road conditions while restoring energy considered. In addition, the ride comfort and handling stability of vehicle are mutually constrained, and the contradiction between them is still prominent under the passive mode. In order to meet the optimal performance of hydraulic electrical energy-regenerative suspension during the global operating condition, a hydraulic electrical energy-regenerative suspension with 3 working modes focusing on comfort, sport and comprehensiveness modes was designed to regenerate vibration energy while improving the ride comfort and handling stability of the vehicle in this paper. The road excitation frequency was chosen as the suspension mode switching threshold. The hydraulic electrical energy-regenerative shock absorber was composed of a hydraulic cylinder, a hydraulic rectifier bridge, a hydraulic motor, 2 accumulators, the hydraulic pipeline, a rotary motor, etc., wherein the hydraulic rectifier bridge consisted of 4 one-way valves. The DC-DC converter was introduced into the suspension energy-regenerative circuit. Based on this, the damping force formula of the shock absorber was derived. The double loop semi-active control scheme consisting of skyhook-groundhook control and fuzzy PID control was designed. The semi-active control of the hydraulic electrical energy-regenerative suspension was achieved based on the energy-regenerative circuit. The DC-DC converter could work in both boost and buck modes. The duty cycle of the MOS tube switching signal in the DC-DC converter was adjusted real time to change the damping force of the damper. Moreover, the Kalman Filter algorithm was introduced to accurately obtain the suspension state variables to track the ideal damping force. The first-order zero-crossing detection method was introduced to identify the main frequency of the road input, which was used as the switching threshold of each suspension working mode. The simulation results showed that the hydraulic electrical energy-regenerative semi-active suspension could switch the working mode adaptively according to the road frequency, and improve the vehicle dynamic performance effectively than the single mode control of semi-active suspension while regenerating energy. The proposed hydraulic electrical energy-regenerative suspension combined with road frequency self-adaption could coordinate suspension dynamic performance with energy-regenerative characteristics. The vehicle body acceleration in the comfort mode was reduced by 13.75% compared with that of the single mode control suspension, and the tire dynamic load was reduced by 17.76% in the sport mode. To verify the effectiveness of the simulation, a bench test was performed. The deviations of the PTP(peak-to-peak) value of test and simulation data of vehicle body acceleration were 1.36%, 15.72%, 4.86%, and 13.6%, respectively, and the ones of the tire dynamic load were 9.34%, 13.62%, 7.82%, and 15.47%, respectively. The errors between the test and simulation results was within 16%, which verified the correctness of the simulation results and the feasibility of the semi-active suspension system. The study provides an important reference for the performance upgrade of the hydraulic electrical energy-regenerative suspension.
vehicles; suspension; control; hydraulic electrical energy-regenerative; double loop scheme; multi-mode switching; road frequency self-adaption
2018-07-23
2019-01-20
國家自然科學基金(51575240);江蘇省重點研發計劃(BE2016147)
汪若塵,教授,博士生導師,主要從事車輛動態性能模擬與控制研究。Email:wrc@ujs.edu.cn.
10.11975/j.issn.1002-6819.2019.06.007
U 463.33
A
1002-6819(2019)-06-0055-10
汪若塵,丁彥姝,孫 東,丁仁凱,孟祥鵬. 基于路面激勵自適應的液電饋能懸架動力學性能協調控制[J]. 農業工程學報,2019,35(6):55-64. doi:10.11975/j.issn.1002-6819.2019.06.007 http://www.tcsae.org
Wang Ruochen, Ding Yanshu, Sun Dong, Ding Renkai, Meng Xiangpeng. Dynamic performance coordination control of hydraulic electrical energy-regenerative suspension based on road excitation self-adaptation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(6): 55-64. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.06.007 http://www.tcsae.org