棒束通道內(nèi)定位格架攪混特性PIV可視化研究
2019-05-13 07:31:10譚思超祁沛垚米爭鵬何宇豪
原子能科學(xué)技術(shù) 2019年4期
李 興,譚思超, *,祁沛垚,米爭鵬,何宇豪
(1.哈爾濱工程大學(xué) 核安全與仿真技術(shù)國防重點學(xué)科實驗室,黑龍江 哈爾濱 150001; 2.中國核動力研究設(shè)計院,四川 成都 610041)
燃料組件是核電站反應(yīng)堆系統(tǒng)的核心部件,是核裂變反應(yīng)的發(fā)生地,也是核動力系統(tǒng)熱源,因此其性能直接影響核反應(yīng)堆系統(tǒng)的可靠性、安全性和經(jīng)濟性[1]。定位格架作為燃料組件的重要部件,在燃料組件中不僅起到定位、支撐和夾持的作用,而且定位格架上方設(shè)置的攪混裝置對反應(yīng)堆熱工水力特性的影響十分顯著,如帶攪混翼的定位格架,相比于無攪混翼格架,可使燃料組件內(nèi)臨界熱流密度提高20%以上,使熱工性能明顯改善[2]。因此開展定位格架攪混性能研究有助于燃料組件的性能優(yōu)化,對反應(yīng)堆系統(tǒng)設(shè)計和安全運行十分重要。
國內(nèi)外不少學(xué)者采用計算流體力學(xué)(CFD)方法對燃料組件內(nèi)定位格架攪混作用下的三維流場開展了一系列研究,相對于其他方法具有顯著的經(jīng)濟性和靈活性,能更好地優(yōu)化燃料組件熱工水力性能。然而目前通過CFD計算模擬燃料組件內(nèi)部流動傳熱特性的準(zhǔn)確性和可靠性仍需進一步驗證,模型適用性還要繼續(xù)改進與完善[3-7]。對于模擬燃料組件的實驗研究可很好地補充CFD計算短板,但傳統(tǒng)的測量方法已無法滿足人們對測量精度以及測量范圍的要求,因此對于燃料組件的結(jié)構(gòu)設(shè)計仍迫切需要一種能提供準(zhǔn)確、可靠、全場的測量方法。
隨著測量技術(shù)的發(fā)展和進步,先進的可視化測量技術(shù)被應(yīng)用到棒束通道內(nèi)流場的測量,國外學(xué)者應(yīng)用粒子圖像測速(PIV)技術(shù)針對帶定位格架的棒束通道內(nèi)流場研究較多[8-12]。受到棒束通道復(fù)雜結(jié)構(gòu)和缺乏測量技術(shù)的限制,國內(nèi)多集中于棒束通道內(nèi)阻力特性研究[13-14],而開展針對棒束通道的可視化研究較少[15]。本文應(yīng)用PIV技術(shù)對帶有定位格架的5×5棒束通道內(nèi)冷卻劑流動特性開展可視化研究。通過設(shè)計光路系統(tǒng),針對定位格架的攪混性能開展定位格架上下游流場測量,分析不同流速、格架間距對棒束通道流場的影響,為今后燃料組件的設(shè)計和優(yōu)化提供重要參考。
1 實驗裝置
棒束通道流動可視化實驗系統(tǒng)主要包括流動回路、可視化實驗本體、光學(xué)系統(tǒng)、數(shù)據(jù)采集系統(tǒng)以及相關(guān)儀表設(shè)備,如圖1所示。可視化實驗本體以及光學(xué)系統(tǒng)固定于減震平臺以盡量降低由振動引入的測量誤差。
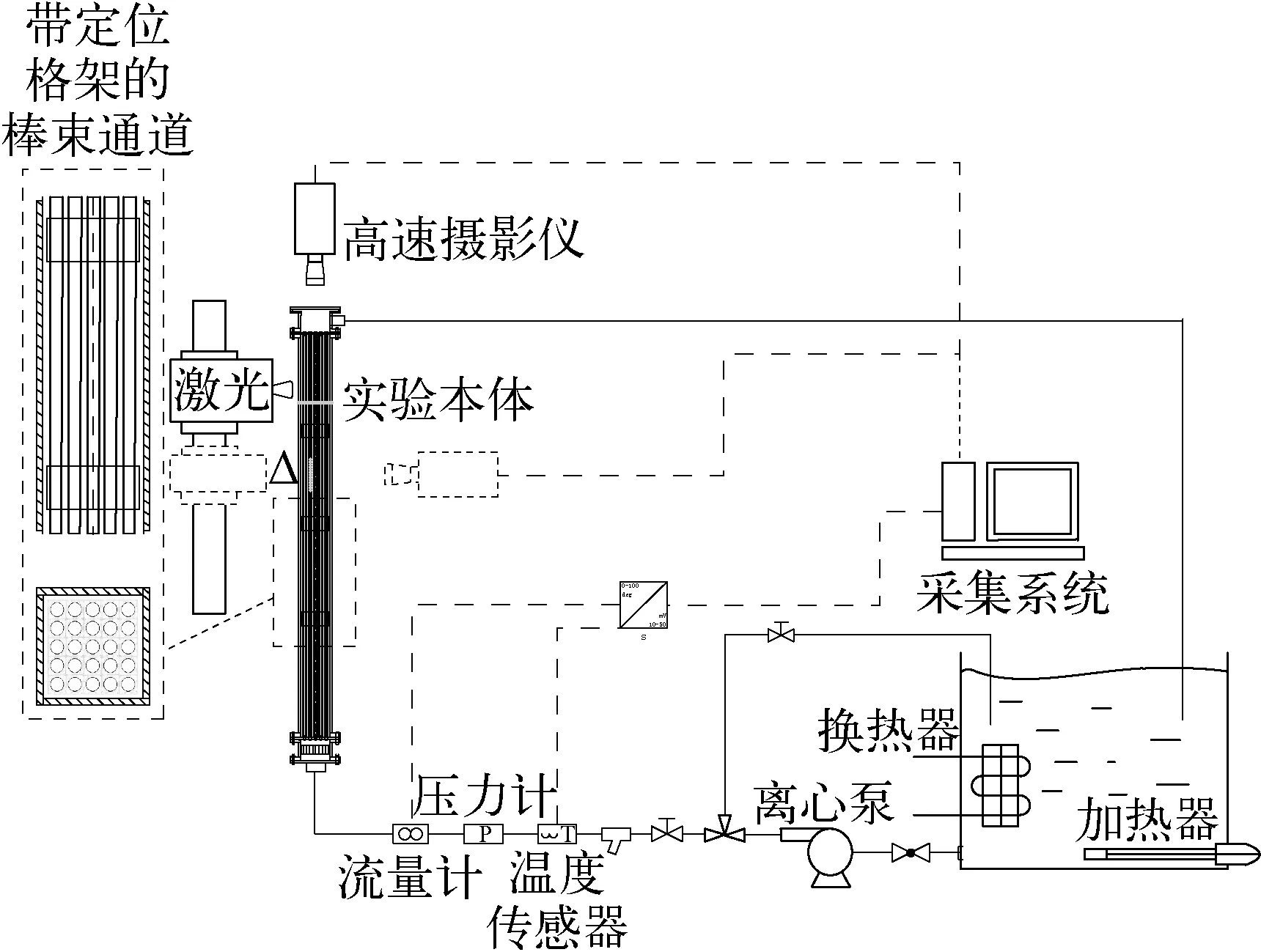
圖1 實驗回路系統(tǒng)Fig.1 Experiment flow system
1.1 實驗回路
實驗回路包括循環(huán)回路和外部冷卻回路。循環(huán)回路主要包含循環(huán)水箱、循環(huán)泵、過濾器、溫度傳感器、流量計、壓力計、5×5棒束實驗本體(燃料組件模擬體)以及相應(yīng)的連接管道閥門等。外部冷卻回路主要由換熱器以及連接管組成。換熱器放置在水箱中,主要是保證循環(huán)回路中去離子水溫度恒定。
實驗開始前,需將去離子水加熱到一定溫度,以降低水中含氧量,防止在運行過程中產(chǎn)生氣泡影響拍攝效果。實驗在常溫常壓下進行,實驗過程中,水箱中的水由循環(huán)泵驅(qū)動后流經(jīng)流量計進入5×5棒束通道實驗段,循環(huán)流量通過回路閥門與旁通閥門的開度調(diào)節(jié)。通過流量計、溫度計及壓力計監(jiān)控系統(tǒng)的流動狀態(tài)。
1.2 實驗本體
實驗本體采用5×5棒束正方形矩陣排列,具體通道參數(shù)如圖2所示。棒束通道實驗本體作為燃料組件的模擬體,是流場的測量實施區(qū)域,要求具有良好的可視化性能。實驗本體主要包括可視化流道筒體與可視化棒束。
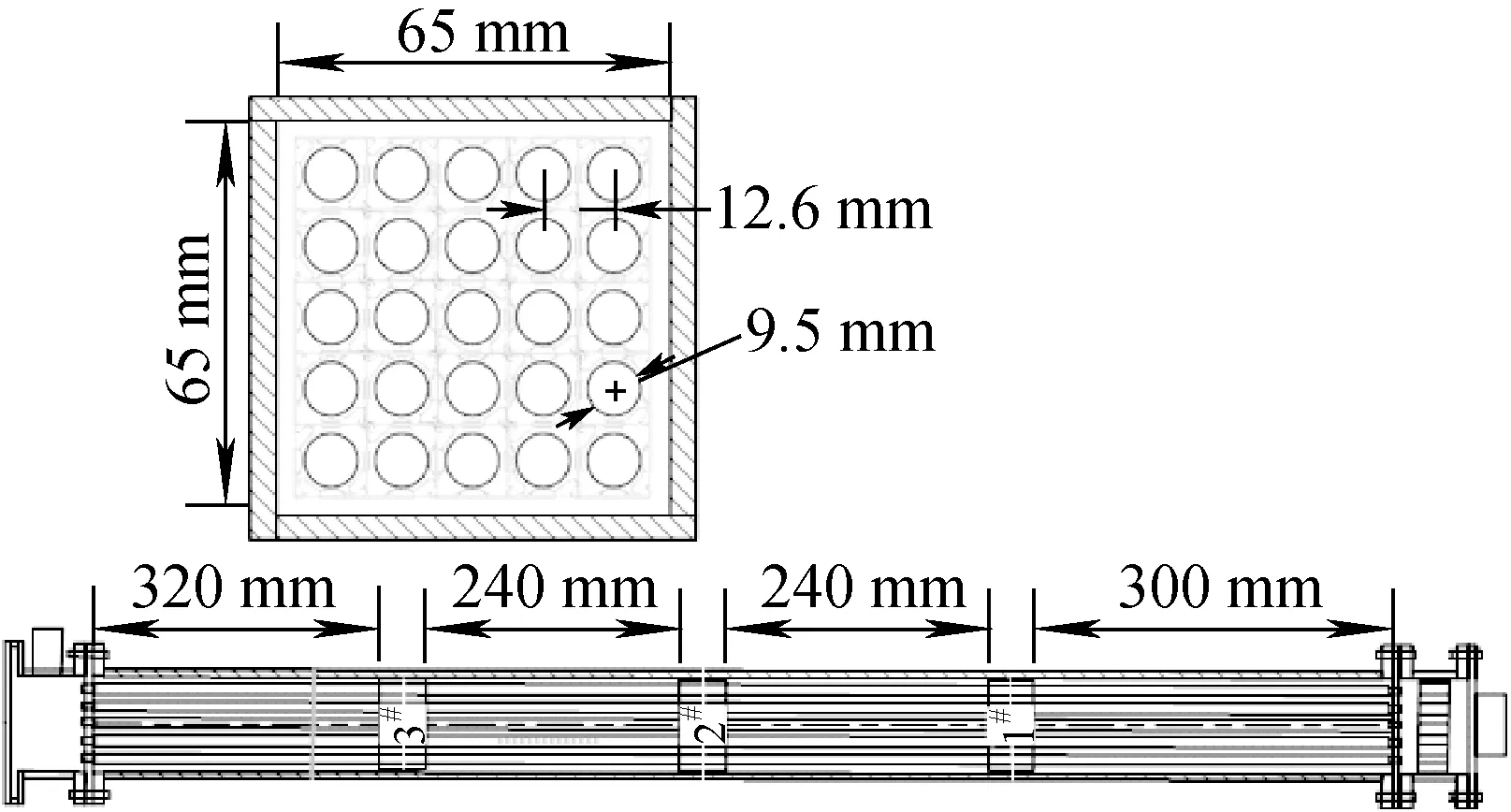
圖2 棒束通道Fig.2 Rod bundle
流道筒體四壁由透明有機玻璃粘接而成,兩端通過螺栓鏈接,方便拆卸。本體入口處設(shè)有蜂窩板、孔板,用以整流,以盡量降低入口效應(yīng)的影響。在實驗本體的頂部邊緣設(shè)有排氣閥,用于實驗初始階段的充水排氣,排氣孔設(shè)置在本體的外緣,目的是防止橫截面拍攝時遮擋流道。
棒束結(jié)構(gòu)采用氟化乙烯丙烯共聚物(FEP)材料,F(xiàn)EP的折射率為1.338,與水的折射率匹配誤差為0.375%,可有效減小相界面變化引入的示蹤粒子位移誤差[12]。但FEP材料對光的吸收率較大,所以壁厚選擇0.35 mm,整個模擬燃料棒呈高度透明狀態(tài)。為避免流體經(jīng)過定位格架后改變流向沖擊棒束進而導(dǎo)致流致振動現(xiàn)象發(fā)生,通過拉直實驗棒束保證準(zhǔn)直性。
棒束通道內(nèi)設(shè)置有3個定位格架,定位格架結(jié)構(gòu)如圖3所示,包括鋼突、彈簧、攪混翼、圍板等結(jié)構(gòu)部件,鋼突和彈簧主要起固定和夾持棒束的作用,攪混翼主要對流場引入橫向攪混。
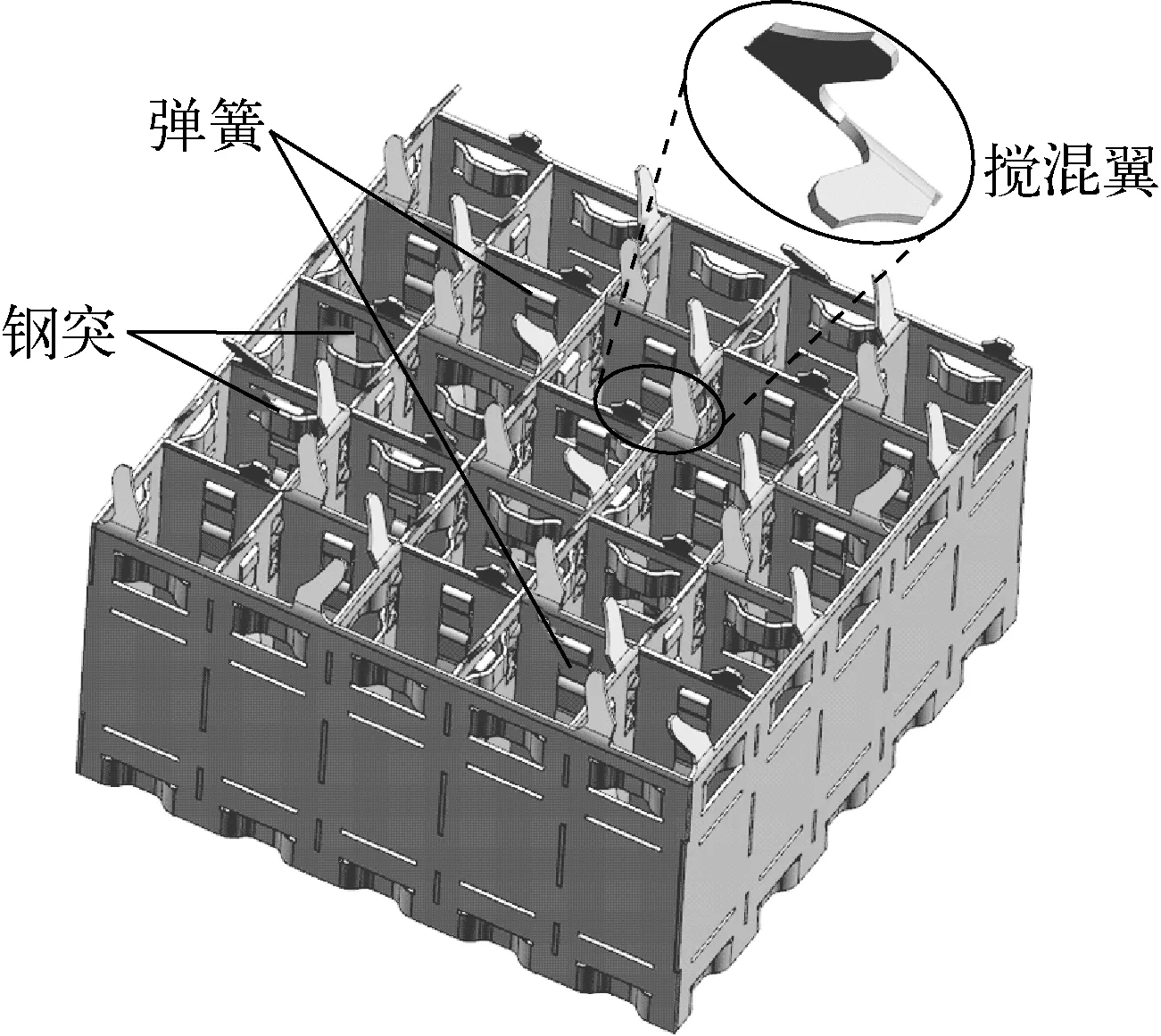
圖3 定位格架幾何結(jié)構(gòu)Fig.3 Schematic diagram of spacer grid
2 PIV測量系統(tǒng)
PIV測量系統(tǒng)由高速攝影儀、連續(xù)激光器、系統(tǒng)控制軟件、后處理軟件以及相關(guān)的光學(xué)透鏡和支架組成。具體PIV系統(tǒng)參數(shù)列于表1。
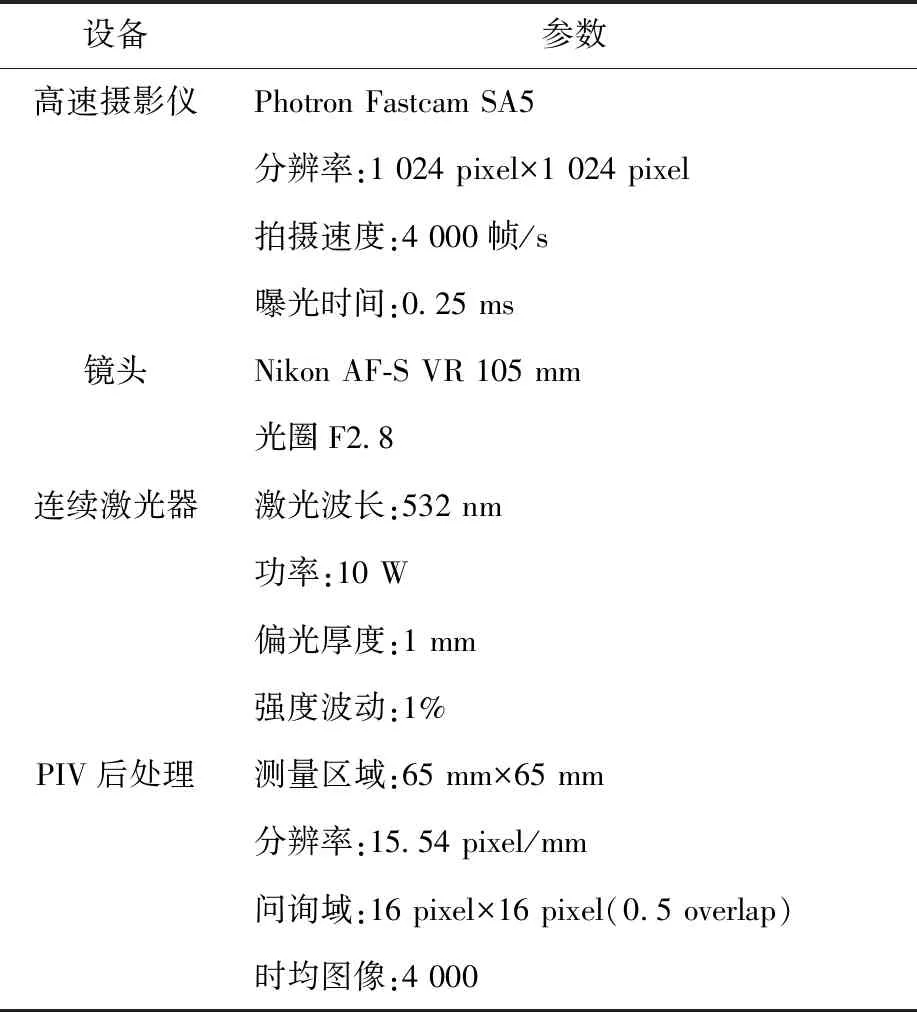
表1 PIV系統(tǒng)參數(shù)Table 1 PIV parameter
PIV技術(shù)是一種基于流場中粒子圖像互相關(guān)分析的非接觸式流場測量技術(shù),能無擾動、精確有效地測量流速分布。利用PIV技術(shù)測量流場時,需在流場中散播比重適當(dāng)、跟隨性較強的示蹤粒子,用流場中示蹤粒子的運動可基本表征流體微團運動;片光源照亮測量區(qū)域,同時使用高速攝影儀俘獲粒子移動信息,并記錄相鄰兩張圖像的時間步長,進行圖像相關(guān)計算,識別示蹤粒子在相鄰兩張圖像中的位置,從而確定粒子位移,得到流場分布[16]。
應(yīng)用PIV技術(shù)測量流場時,示蹤粒子的選取對測量精度至關(guān)重要。受棒束通道復(fù)雜流場行為的限制,實驗選擇聚酰胺粒子(粒子直徑10 μm,比重1.04 g/mL),并應(yīng)用斯托克斯數(shù)(St)評價該粒子的示蹤行為[17]。示蹤粒子的斯托克斯數(shù)是粒子的松弛時間τp和流體特征時間τk之比,計算如下:
St=τp/τk
(1)
(2)
τk=Dh/U
(3)
其中,ρp、dp、μ、Dh、U分別為粒子密度、粒子直徑、循環(huán)工質(zhì)動力黏度、通道的水力直徑和通道內(nèi)流速。經(jīng)計算,棒束通道內(nèi)示蹤粒子的斯托克斯數(shù)為0.000 6,遠小于1,說明該粒子對棒束通道內(nèi)流場具有良好的跟蹤效果。
PIV后處理程序為LaVision公司的二維PIV處理軟件Davis,互相關(guān)計算窗口為16 pixel×16 pixel,窗口內(nèi)的粒子數(shù)量為5~10個,相鄰圖像的粒子位移為7.8 pixel,重疊窗口為0.5,對應(yīng)實際分辨率為0.52 mm×0.52 mm。攝影儀的拍攝速度為4 000幀/s,粒子的橫向位移小于激光平面的25%,這樣的條件可確保互相關(guān)的準(zhǔn)確進行。在應(yīng)用PIV技術(shù)測量流速的過程中,測量誤差主要來源于標(biāo)定誤差、圖像匹配誤差、粒子位移誤差、時間誤差等,實驗過程中誤差來源是相互獨立、互不影響的。棒束通道內(nèi)速度測量不確定度參照日本可視化協(xié)會計算方法[18],速度誤差uc的計算公式為:
uc=
(4)
式中:u為粒子速度;M為采集圖像和實際物體的放大倍數(shù);X為后處理中識別粒子位移;Δt為兩幀圖像之間的時間差;δu為粒子速度與流體速度誤差。
表2列出棒束通道內(nèi)主流速為1 000 mm/s時對應(yīng)的主要誤差貢獻,速度測量總不確定度為6.9%。

表2 PIV不確定度評估Table 2 PIV uncertainty analysis
3 流場結(jié)果及分析
3.1 試驗工況
實驗在常溫常壓下進行,針對定位格架的攪混特性研究,應(yīng)用PIV技術(shù)測量帶定位格架以及不帶定位格架棒束通道內(nèi)A截面和B截面流場分布(圖4);針對定位格架在不同流速條件下的流體攪混性能,開展棒束通道內(nèi)流速為500 mm/s和1 000 mm/s的流場測量。另外,通過改變棒束通道內(nèi)定位格架之間的間距,分析不同間距(210、240、260 mm)下定位格架對棒束通道內(nèi)流場的作用規(guī)律。
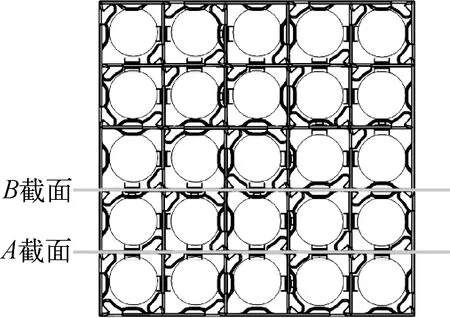
圖4 測量平面Fig.4 Measuring plane
3.2 格架上下游速度分布
為直觀展示定位格架對棒束通道內(nèi)流場的攪混作用,開展了定位格架上下游以及不帶格架棒束通道相應(yīng)位置的流場測量,并獲得了流場的信息。
圖5為不帶定位格架以及帶定位格架的棒束通道內(nèi)流場分布。原格架上、下游位置的橫向速度(u)和縱向速度(v)如圖6所示。
由圖6發(fā)現(xiàn),原定位格架位置處上、下游的速度分布差異較小。棒束通道內(nèi)橫向速度較低,幾乎為軸向速度的1/100,說明棒束通道內(nèi)流體的橫向運動很小,且棒束通道內(nèi)的橫向速度在沿程無明顯變化。棒束通道內(nèi)軸向速度較高,在子通道內(nèi)基本呈現(xiàn)出子通道中心處軸向速度較大、子通道邊緣軸向速度較低,主要是因為子通道邊緣棒間隙較小,流體與棒束壁面之間的黏性作用對流體阻力作用更加明顯,導(dǎo)致該區(qū)域流速較低。由于不帶定位格架棒束通道內(nèi)橫向速度較小,導(dǎo)致各子通道之間流體能量交換較低,即流體之間的攪混能力較弱。
圖7為棒束通道內(nèi)單一子通道幾何結(jié)構(gòu),子通道中心為4根棒組成流道的中心位置,子通道邊緣為相鄰兩根棒的間隙。
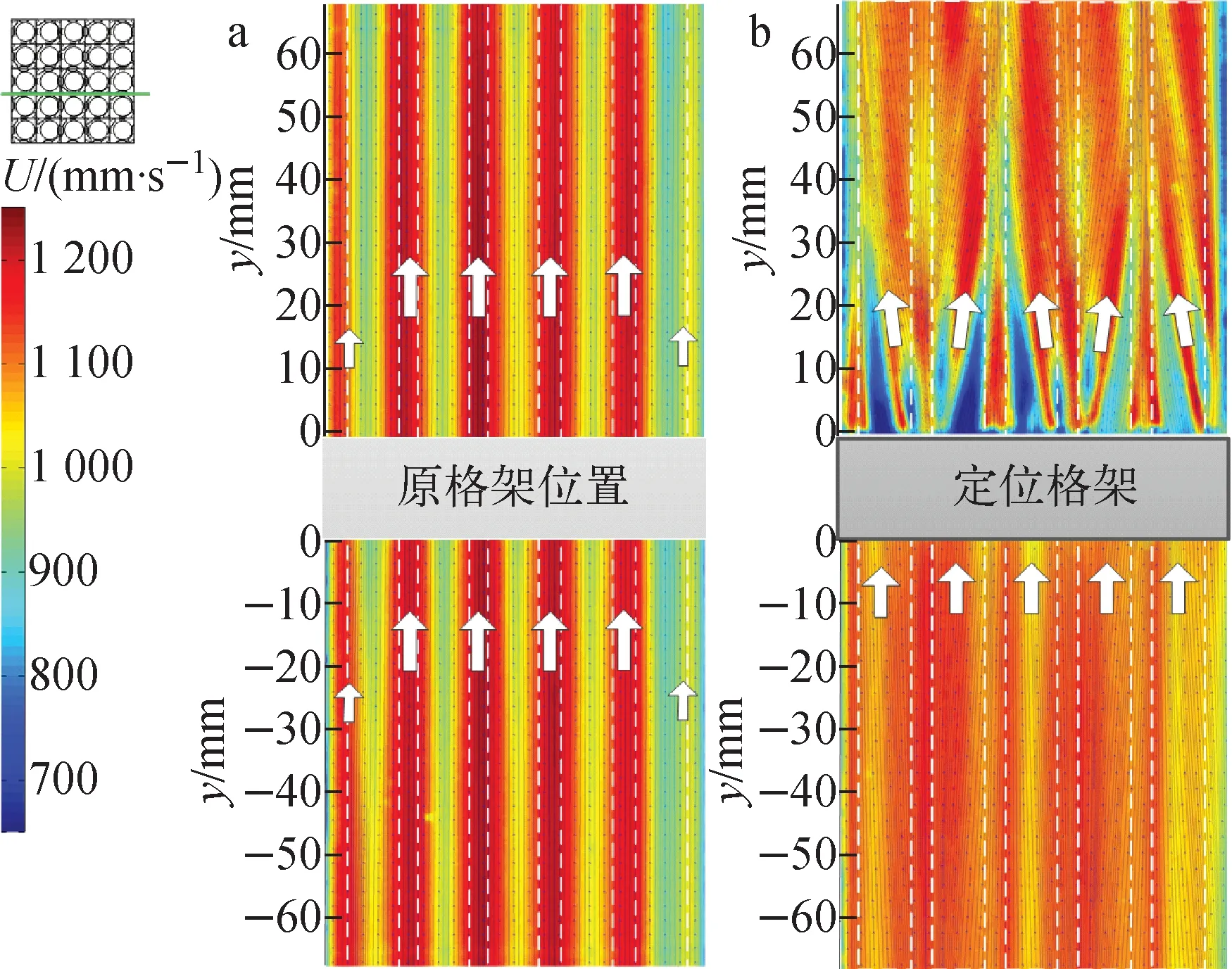
圖5 棒束通道的流場分布Fig.5 Distribution of flow field in rod bundle
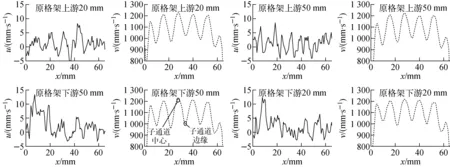
圖6 不帶定位格架棒束通道內(nèi)速度分布Fig.6 Velocity distribution in rod bundle without spacer grid
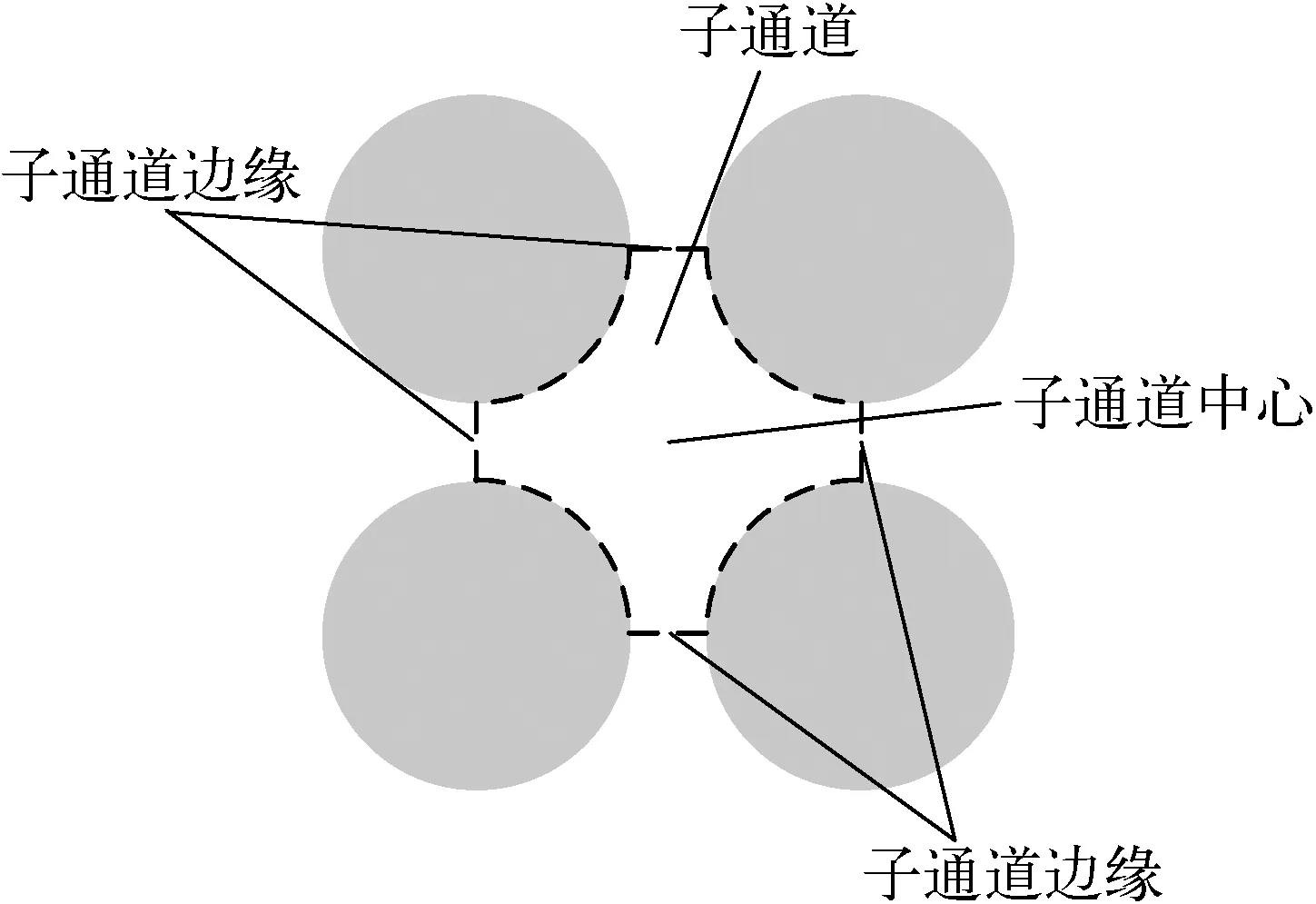
圖7 子通道幾何結(jié)構(gòu)Fig.7 Geometry of sub-channel
棒束通道內(nèi)平均流速為1 000 mm/s(Re=10 400)時,對應(yīng)圖6中子通道邊緣和子通道中心處的速度相差約180 mm/s,為主流速度的18%;棒束通道內(nèi)平均流速為500 mm/s(Re=5 200)時,子通道中心和邊緣的速度相差約80 mm/s,為主流速度的16%;棒束通道內(nèi)平均流速為150 mm/s(Re=1 700)時,子通道中心和邊緣的速度相差約50 mm/s,為主流速度的30%。導(dǎo)致上述現(xiàn)象的主要原因是子通道內(nèi)流體運動主要受慣性力和壁面黏滯力共同作用,慣性力和黏滯力分別對流體運動的貢獻程度是導(dǎo)致子通道中心和邊緣速度分布不均的直接原因。低流速時,黏滯力對流體作用明顯,對壁面附近流體的阻礙作用明顯,導(dǎo)致子通道內(nèi)速度分布差異明顯;高流速時,黏滯力相比慣性力對流體的貢獻弱,黏滯力對流體的阻礙作用被削弱,因此子通道內(nèi)速度差異相對較小。
從圖5b可發(fā)現(xiàn),定位格架上游流場直觀展示出流速分布相對均勻,子通道之間的速度梯度較小,流體之間的攪混能力較弱;定位格架下游流場直觀展示了定位格架對下游流場的攪混性能,上游均勻流體經(jīng)過定位格架后局部流體運動方向發(fā)生明顯的變化,且相鄰子通道之間的速度梯度明顯增大。流體的運動方向發(fā)生變化,主要是因為定位格架上的攪混翼改變了流體運動方向,導(dǎo)致平行于攪混翼方向的流速相比于其他位置較高。
截面A定位格架上下游速度分布示于圖8。可發(fā)現(xiàn),定位格架上游兩個位置橫向速度分布差異較小,即在定位格架上游附近橫向速度衰減較慢;同樣上游兩個位置軸向速度分布差異也較小,且水平方向上軸向速度波動幅值較小,因此說明定位格架上游的流體之間攪混較弱,速度分布相對較均勻。經(jīng)過定位格架后橫向速度明顯增大,定位格架下游20 mm處的橫向位置上縱向速度波動明顯增大,說明在定位格架攪混作用下流體之間的動量攪混更加明顯;流體向下游運動時橫向速度幅值衰減明顯,軸向速度在水平方向的波動也減小。相比光棒子通道內(nèi)的速度分布,除定位格架出口附近由于流道面積變化導(dǎo)致流速分布不均外,定位格架下游黏滯作用對子通道內(nèi)速度分布的影響較小,子通道內(nèi)速度差異基本控制在10%以內(nèi)。
圖9為截面B定位格架上下游的速度分布,整體分布趨勢與截面A內(nèi)的速度分布基本相同,但在細節(jié)位置上的分布還存在一定的差異,主要是因為兩個截面的攪混翼等阻力件的布置方式出現(xiàn)差異,進而導(dǎo)致不同位置的速度分布差異。
3.3 流速影響
為分析定位格架在不同流速下對流體的攪混作用,開展了棒束通道內(nèi)流速(U)為500 mm/s(Re=5 200)和1 000 mm/s(Re=10 400)條件下定位格架下游流場的測量,并分別提取橫向速度與軸向速度的絕對平均值,此時棒束通道流場處于非層流條件下,無量綱化橫縱速度為u/U、v/U,如圖10所示。在兩種流速下棒束通道內(nèi)無量綱橫向速度沿程分布趨勢基本無明顯變化,在格架下游0~30 mm橫向速度增加,到峰值后逐漸減小;然而1 000 mm/s流速工況下無量綱橫向速度明顯大于500 mm/s條件下無量綱橫向速度,說明高流速能促進橫向速度的產(chǎn)生,促進幅值約為0.02。通過圖10發(fā)現(xiàn),無量綱軸向速度與無量綱橫向速度幅值分布相反,1 000 mm/s流速條件下定位格架下游無量綱軸向速度較500 mm/s流速條件下小0.02,主要是因為定位格架對流體的阻力作用隨流速的增加更加明顯。
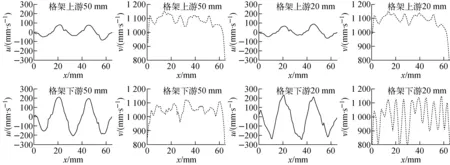
圖8 截面A定位格架上下游速度分布Fig.8 Velocity distribution upstream and downstream spacer grid in plane A
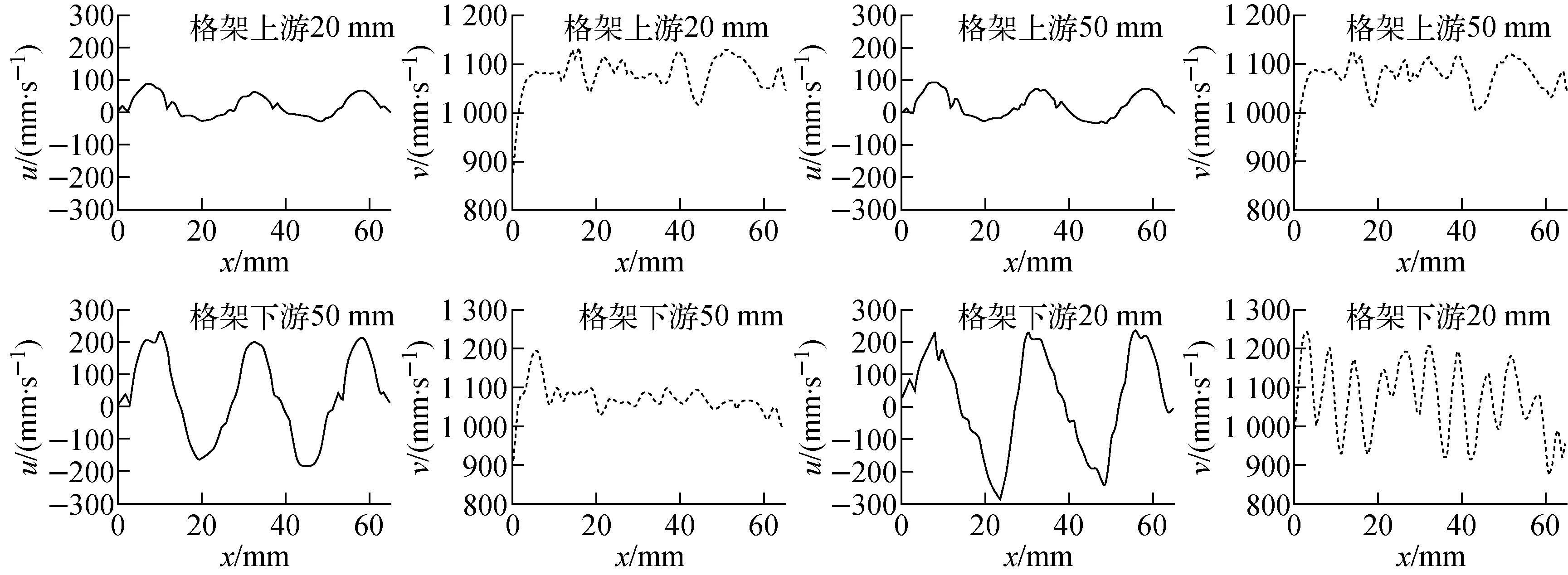
圖9 截面B定位格架上下游速度分布Fig.9 Velocity distribution upstream and downstream spacer grid in plane B
3.4 湍流統(tǒng)計
為直觀展示定位格架下游流場的湍流特性,采用橫向、軸向速度均方根(RMS)來評價定位格架下游的速度波動特點,計算公式如下:
(5)
(6)
其中:URMS(x,y)為橫向速度均方根;VRMS(x,y)為軸向速度均方根;ui(x,y)、vi(x,y)為某一時刻某一位置內(nèi)的速度;U(x,y)、V(x,y)為該位置一段時間平均速度。
圖11為測量平面A和B的速度均方根分布云圖。可看出,定位格架下游附近橫向、軸向速度均方根較大,表明定位格架導(dǎo)致流體速度波動增大;軸向速度均方根較橫向速度均方根大,主要是因為定位格架對軸向速度阻礙作用明顯,流體經(jīng)過定位格架,流道面積發(fā)生明顯變化,局部位置會出現(xiàn)射流現(xiàn)象,導(dǎo)致下游軸向速度的波動較大。
圖12為不同格架間距(210、240、260 mm)下定位格架下游橫向速度和軸向速度均方根的沿程分布。由圖12可知,不同間距條件下定位格架對下游流場的影響不明顯,橫向速度的波動經(jīng)過定位格架后迅速衰減,到下游約150 mm處趨于平緩;軸向速度波動變化規(guī)律基本相同,經(jīng)過定位格架后波動明顯衰減,直到約40 mm后,才趨于平緩。
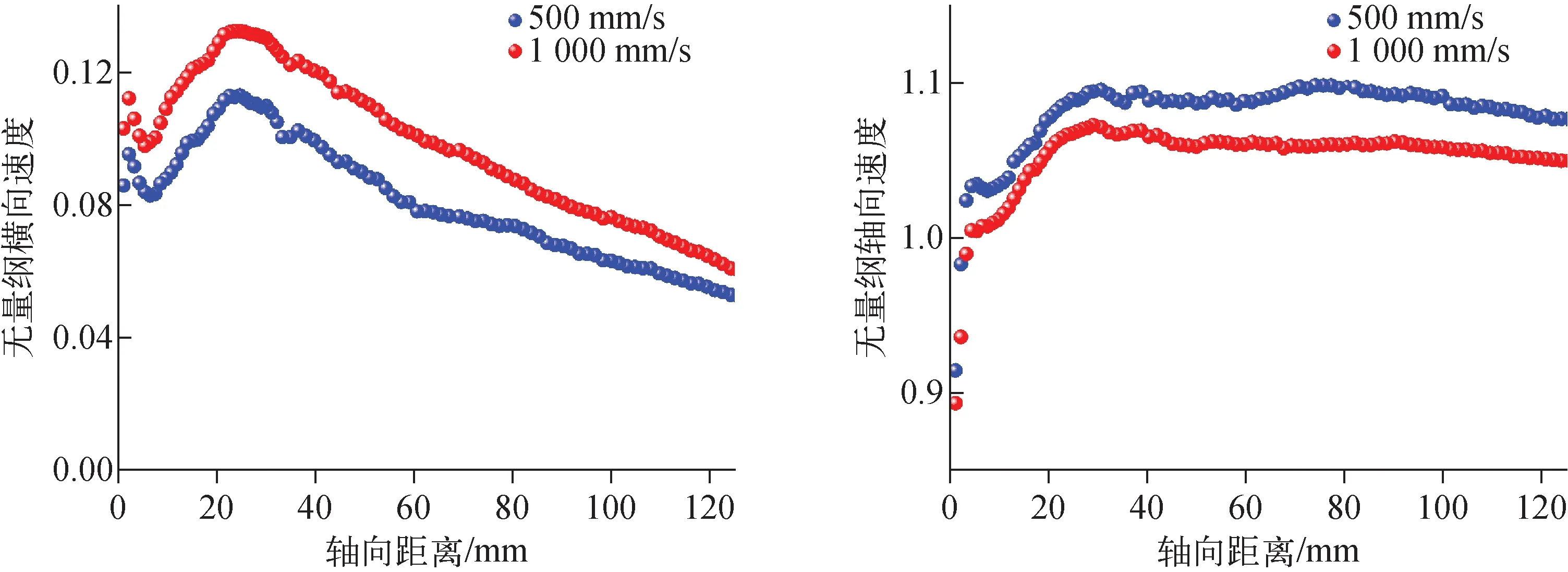
圖10 不同流速下橫向、軸向速度沿程變化Fig.10 Streamwise development of lateral velocity and longitudinal velocity under different main flows
圖11 定位格架下游速度均方根分布Fig.11 RMS distribution of velocity downstream spacer grid
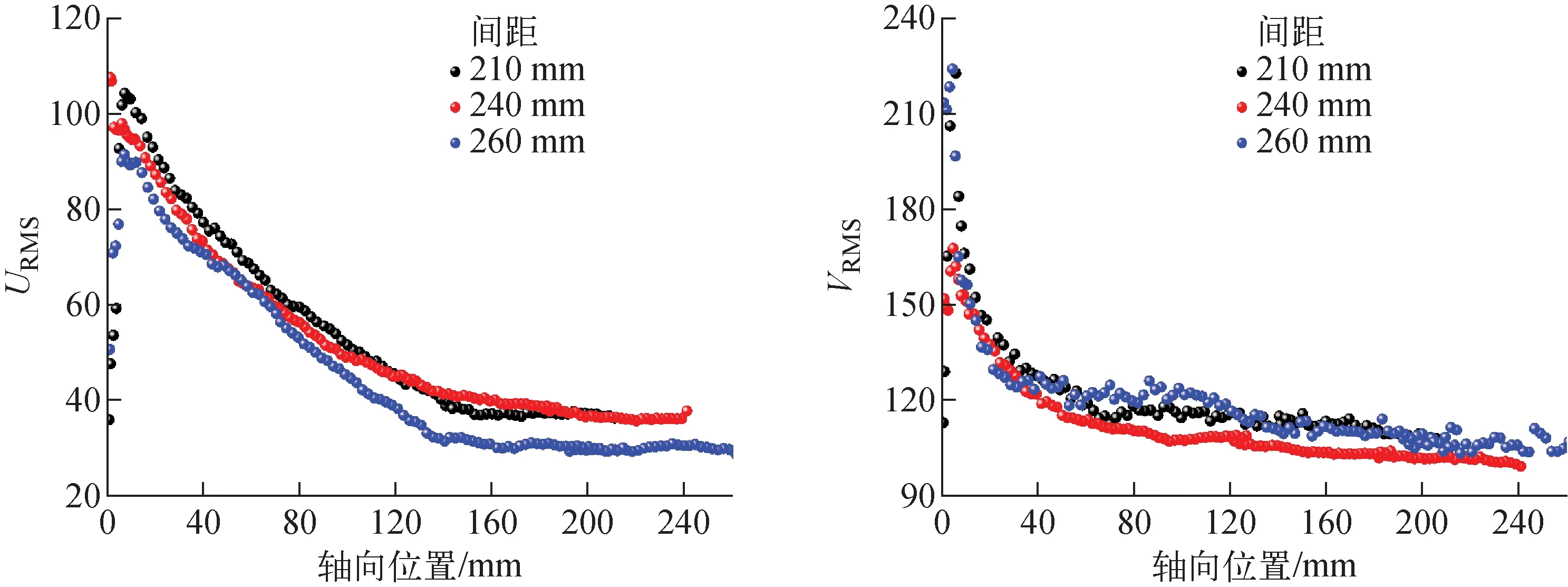
圖12 橫向、軸向速度均方根變化Fig.12 RMS distribution of lateral velocity and longitudinal velocity
4 結(jié)論
應(yīng)用PIV技術(shù)在常溫常壓條件下實現(xiàn)了棒束通道復(fù)雜流場信息測量,測量結(jié)果直觀展現(xiàn)了棒束通道定位格架對流場的攪混性能。對比分析了有無格架棒束通道內(nèi)流場在常溫常壓下的分布特征,定量分析了定位格架在低參數(shù)下對棒束通道流場攪混的貢獻程度。
1) 光棒子通道內(nèi)子通道邊緣與中心的速度差異在層流與湍流條件下表現(xiàn)出明顯的區(qū)別;定位格架攪混特性改變了棒束通道內(nèi)速度分布特征,減小了子通道內(nèi)速度幅值上的差異。
2) 高流速下定位格架對橫向流速起促進作用,對軸向速度的阻礙作用明顯增加;反之,低流速條件下定位格架不利于橫向速度產(chǎn)生,對軸向速度的抑制作用相比高流速較弱。
3) 軸向速度波動較橫向速度波動明顯,且橫向速度在定位格架下游150 mm處衰減趨于平緩,軸向速度在定位格架下游40 mm以后衰減趨于平緩。
