基于倉(cāng)儲(chǔ)物流環(huán)境的無(wú)人叉車室內(nèi)定位系統(tǒng)研究
2019-05-16 01:04:34厲庭華楊慶華屠曉偉
自動(dòng)化儀表 2019年2期
厲庭華,楊慶華,屠曉偉,任 彬
(上海大學(xué)機(jī)電工程與自動(dòng)化學(xué)院,上海 200444)
0 引言
在倉(cāng)儲(chǔ)物流配送中,由于貨物的數(shù)量與種類繁多,工人們花費(fèi)大量時(shí)間在倉(cāng)庫(kù)中取貨,并需要使用叉車協(xié)助搬運(yùn)[1-2]。為提高工作效率并節(jié)約人力成本,自主移動(dòng)機(jī)器人與無(wú)人叉車已被引入倉(cāng)儲(chǔ)空間,代替人工搬運(yùn)貨物[3]。
為建立系統(tǒng)、科學(xué)的倉(cāng)儲(chǔ)物流管理體系,需要對(duì)自主移動(dòng)機(jī)器人與無(wú)人叉車進(jìn)行實(shí)時(shí)、準(zhǔn)確的室內(nèi)定位。現(xiàn)有方法主要有全球定位系統(tǒng)(global positioning system,GPS)、航跡推算定位、聲波網(wǎng)絡(luò)定位與無(wú)線射頻識(shí)別(radio frequency identification,RFID)等[4],分別使用了GPS技術(shù)、慣性導(dǎo)航技術(shù)、超聲技術(shù)與無(wú)線傳感器技術(shù)。但以上方法都存在一些不足,如GPS的布局范圍小、慣性傳感器隨時(shí)間累積誤差大、超聲受環(huán)境影響大、無(wú)線射頻成本高等[5-7]。
為了在節(jié)約人力資源的同時(shí)提高物流配送效率,無(wú)人叉車在倉(cāng)儲(chǔ)物流中起著關(guān)鍵性作用。實(shí)時(shí)掌握無(wú)人叉車在室內(nèi)的位置信息,可有效提高控制精度與配送準(zhǔn)確度。
本文主要提出了一種基于線性電荷耦合器件(charge coupled device,CCD)圖像傳感器的室內(nèi)定位方法。將三軸向CCD傳感器與飛行時(shí)間(time of flight,TOF)深度相機(jī)固定裝配在無(wú)人叉車上,在室內(nèi)正上方天花板均勻布局光點(diǎn)并隨機(jī)點(diǎn)亮,通過(guò)檢測(cè)光線在三軸向CCD組件上的投影偏移;經(jīng)過(guò)物象空間坐標(biāo)系轉(zhuǎn)換,可解算出叉車在大地全局坐標(biāo)系下的坐標(biāo)值。這樣就實(shí)現(xiàn)了對(duì)叉車的實(shí)時(shí)室內(nèi)定位,提高了叉車在倉(cāng)儲(chǔ)物流環(huán)境下的工作效率。
1 坐標(biāo)系變換
1971年,Abdel-Aziz等提出了直接線性變換方法(direct linear transform,DLT),通過(guò)計(jì)算11個(gè)內(nèi)外方位元素來(lái)對(duì)CCD成像組件進(jìn)行校準(zhǔn)[8]。1992年,Gazzani提出了只需解算7個(gè)系數(shù)的方法[8]。吳劍等在此基礎(chǔ)上重建了多組一維成像單元的標(biāo)志點(diǎn)三維坐標(biāo)[9]。駱文博與王東紅等分別在2002年和2006年對(duì)DLT方法中的成像進(jìn)行了成像誤差校正[10-12]。
本文設(shè)計(jì)的光學(xué)三維投影成像模型由兩個(gè)互相垂直的一維線陣CCD組件與TOF相機(jī)固定鏈接,相互垂直構(gòu)成XYZ三個(gè)軸向。CCD組件用于測(cè)量水平面軸向上的偏移量,TOF相機(jī)用于測(cè)量豎直方向上CCD組件平面距離天花板平面的距離。若要實(shí)現(xiàn)叉車的室內(nèi)定位,則需將柱面透鏡、線性CCD與TOF等成像組件裝載在叉車上,并將天花板平面內(nèi)點(diǎn)光源在成像組件上形成的交點(diǎn)成像位置視為叉車的坐標(biāo)點(diǎn)。
CCD光學(xué)三維投影成像模型如圖1所示。

圖1 光學(xué)三維投影成像模型

TOF相機(jī)在大地坐標(biāo)系X下的測(cè)距示意圖如圖2所示。

圖2 TOF相機(jī)測(cè)距示意圖
在與叉車固連的光學(xué)組件中,線性CCD傳感器與柱面透鏡共同組成了水平面,而TOF相機(jī)測(cè)距則為豎直方向。因此,由于室內(nèi)環(huán)境的豎直高度固定,當(dāng)叉車水平地面移動(dòng)時(shí),TOF深度相機(jī)可直接測(cè)得其在大地坐標(biāo)系豎直X軸上的坐標(biāo)值為:
(1)

本文主要以點(diǎn)光源A在線性CCD組件y軸方向上的光學(xué)成像為例。以柱形透鏡的中心點(diǎn)為原點(diǎn)O′,垂直向上方向?yàn)閄′軸,指向線性CCD方向?yàn)閆′軸,與X′Y′平面垂直的方向?yàn)閅′軸。同時(shí),在線陣CCD上建立一維像坐標(biāo)系①,以線陣CCD中點(diǎn)O1為原點(diǎn),與Y′軸平行但方向相反的y軸。點(diǎn)光源A在經(jīng)過(guò)光面鏡投影后形成的平行直線與線陣CCD交于點(diǎn)y1,透鏡光軸與線陣CCD交于點(diǎn)y0,距離約為焦距f。點(diǎn)y0與y1之間的距離Δy就是點(diǎn)光源A投影在線陣CCD的y軸方向上的偏移量。
1.1 從大地坐標(biāo)系到柱面鏡坐標(biāo)系的坐標(biāo)系變換
記點(diǎn)光源A在大地坐標(biāo)系下的坐標(biāo)為(X,Y,Z),若要將三維大地坐標(biāo)系轉(zhuǎn)換到三維柱面鏡坐標(biāo)系,只需進(jìn)行一次坐標(biāo)系的旋轉(zhuǎn)和平移。在旋轉(zhuǎn)矩陣R′和平移矩陣T′的輔助下,可得到點(diǎn)光源A在三維柱面鏡坐標(biāo)系①下的坐標(biāo)(X′,Y′,Z′):

(2)
1.2 從大地坐標(biāo)系到像點(diǎn)坐標(biāo)系的坐標(biāo)系變換
由于像點(diǎn)坐標(biāo)系是一維矩陣,所以無(wú)法通過(guò)坐標(biāo)系之間的旋轉(zhuǎn)與平移直接得到,而需要進(jìn)行間接轉(zhuǎn)換。設(shè)鏡頭沒(méi)有畸變,f為鏡片焦距,根據(jù)針孔成像原理可得到理想的成像模型,投影關(guān)系為:
(3)
(4)

1.3 L系數(shù)、R矩陣、T矩陣計(jì)算

(5)

(6)
在此基礎(chǔ)上求解出各個(gè)L系數(shù)的值,并可得到y(tǒng)軸方向上的偏移量:
(7)
(8)
(9)

由此,已解算出從大地坐標(biāo)系轉(zhuǎn)換到三維柱面鏡坐標(biāo)系①時(shí),旋轉(zhuǎn)矩陣R′的9個(gè)旋轉(zhuǎn)系數(shù)和平移矩陣T′的3個(gè)分量。若已知其中某一坐標(biāo)系的坐標(biāo)值,就可在兩個(gè)坐標(biāo)系之間進(jìn)行轉(zhuǎn)換。
1.4 叉車的大地坐標(biāo)系計(jì)算
由于TOF相機(jī)可直接測(cè)出叉車在大地坐標(biāo)系X軸向上的坐標(biāo),不需要在該方向進(jìn)行坐標(biāo)變換和解算,因此在本節(jié)中只考慮大地水平面Y和Z軸方向上的變換。已知從大地坐標(biāo)系到三維柱面鏡坐標(biāo)系①的轉(zhuǎn)換關(guān)系,利用矩陣求逆,可以反推出從柱面鏡坐標(biāo)系①到大地坐標(biāo)系的計(jì)算方程,具體表達(dá)式如下:
(10)
當(dāng)空間內(nèi)三坐標(biāo)系之間的關(guān)系確定時(shí),本文將一個(gè)光點(diǎn)在CCD上的成像位置視為叉車的坐標(biāo)點(diǎn)。只要測(cè)出叉車上CCD組件的偏移量Δx和Δy,便可得到輔助坐標(biāo)系o4x4y4z4上像點(diǎn)的坐標(biāo)值(0,Δy,Δx)(按照x4、y4、z4軸順序)。又由于柱面鏡與CCD組件為固定鏈接,可直接推算出像點(diǎn)在三維柱面鏡坐標(biāo)系①下的坐標(biāo)值(0,-Δy,f+Δx)(按照X′、Y′、Z′軸順序)。再將該坐標(biāo)值代入式(10),進(jìn)行柱面鏡坐標(biāo)系與大地坐標(biāo)系之間的變換,加上TOF測(cè)得的大地X軸坐標(biāo),所得即為叉車在大地坐標(biāo)系下的準(zhǔn)確位置。
2 仿真試驗(yàn)
在室內(nèi)天花板上取7個(gè)隨機(jī)點(diǎn)光源,利用三坐標(biāo)激光跟蹤儀測(cè)得它們的坐標(biāo)值。其中,天花板高度為3 m,所以它們?cè)趚軸向上的坐標(biāo)值為3 000 mm。同時(shí),給定對(duì)應(yīng)的7個(gè)像點(diǎn)的三軸向坐標(biāo)值,設(shè)定柱面鏡的定焦距為50 mm。在Matlab運(yùn)行本文的算法進(jìn)行仿真試驗(yàn)。
7個(gè)點(diǎn)光源(A點(diǎn))在大地坐標(biāo)系和其投影在三個(gè)一維像坐標(biāo)系O2x、O1y、O3z下的坐標(biāo)值如表1所示。
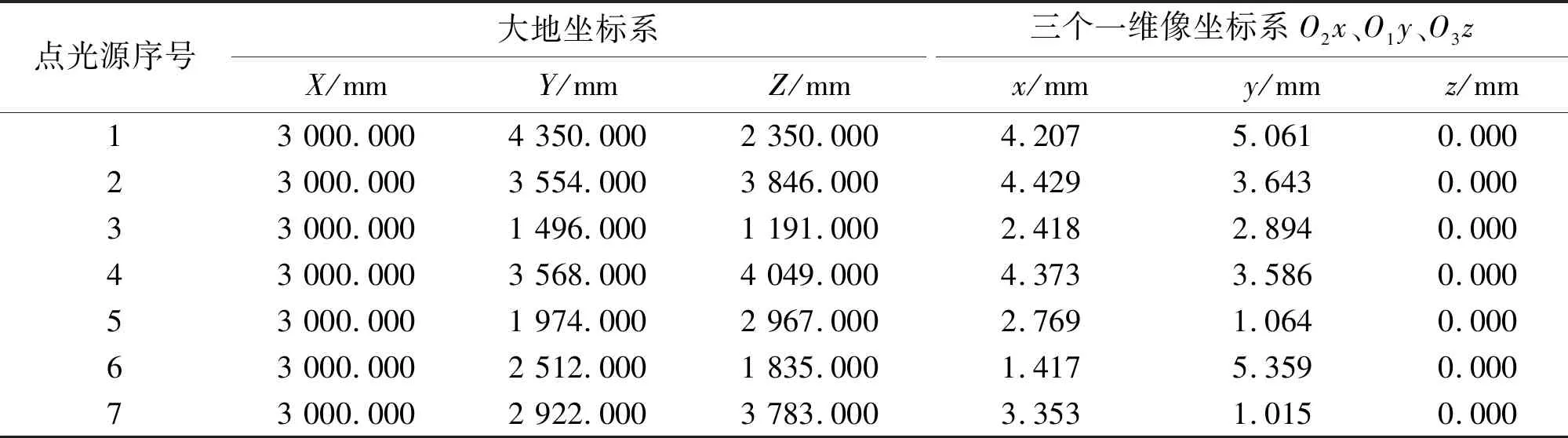
表1 點(diǎn)光源在不同坐標(biāo)系下的坐標(biāo)值
像點(diǎn)在不同坐標(biāo)系下的位置分布如圖3所示。
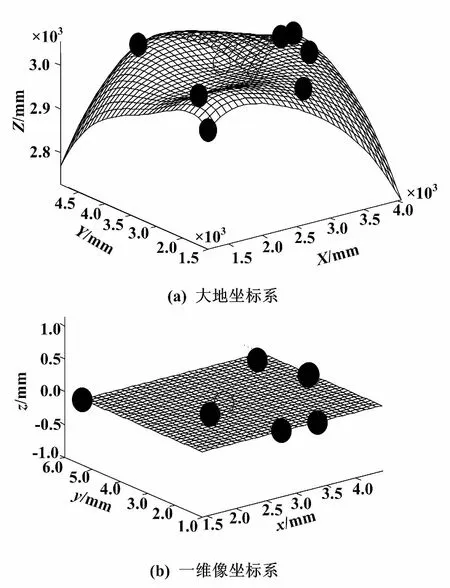
圖3 像點(diǎn)在不同坐標(biāo)系下的位置分布
圖3(a)和圖3(b)分別展示了7個(gè)預(yù)先點(diǎn)光源(黑色實(shí)點(diǎn))和1個(gè)測(cè)試光點(diǎn)(白色空心點(diǎn))在大地坐標(biāo)系及其投影在CCD組件所在的三個(gè)一維像坐標(biāo)系下的位置分布。

利用L′系數(shù),可解算出光軸線與像坐標(biāo)系x軸與y軸的交點(diǎn)位置y0=484.993 mm。同時(shí),也可解算出坐標(biāo)系轉(zhuǎn)換中的旋轉(zhuǎn)矩陣R′和平移矩陣T′,分別為:
(11)

(12)
最終可得出從三維柱面鏡坐標(biāo)系①轉(zhuǎn)換回大地坐標(biāo)系的變換關(guān)系為:

(13)
將像點(diǎn)在柱面鏡坐標(biāo)系下的坐標(biāo)代入式(13),即可得出最終7組叉車在大地坐標(biāo)系XYZ下的位置,以及其在三維柱面鏡坐標(biāo)系①O′X′Y′Z′下的坐標(biāo)。叉車像點(diǎn)在不同坐標(biāo)系下的坐標(biāo)值如表2所示。

表2 叉車像點(diǎn)在不同坐標(biāo)系下的坐標(biāo)值
在建立與解算7組成像模型的基礎(chǔ)上,空間內(nèi)三個(gè)坐標(biāo)系的關(guān)系已確定。隨機(jī)取天花板平面內(nèi)一測(cè)試光點(diǎn)B,它在大地坐標(biāo)系下的坐標(biāo)為(3000.000,2736.000,3239.000),在三軸向CCD組件上的投影坐標(biāo)為(0,-3.273,52.826) (按照X′軸、Y′軸、Z′軸順序)。代入式(22)后可解算出其在大地坐標(biāo)系下的位置為(1000.000,2947.173,5707.520),即為此時(shí)叉車在大地坐標(biāo)系下的位置。像點(diǎn)在大地坐標(biāo)系下的位置分布如圖4所示。

圖4 像點(diǎn)在大地坐標(biāo)系下的位置分布
圖4中,8組像點(diǎn)在大地坐標(biāo)系下的三維分布。其中,黑色實(shí)心球代表7組事先測(cè)定的點(diǎn)光源在叉車CCD組件上的投影點(diǎn),空心球代表測(cè)試光點(diǎn)B的投影成像點(diǎn)。
3 結(jié)束語(yǔ)
綜上所述,對(duì)本文所提出的方法進(jìn)行仿真,驗(yàn)證了方法的可行性和準(zhǔn)確性。當(dāng)室內(nèi)固定點(diǎn)光源發(fā)光,利用事先采集好的至少7組大地坐標(biāo)值和像點(diǎn)坐標(biāo)值,在光學(xué)成像基礎(chǔ)上,快速、準(zhǔn)確地計(jì)算出像點(diǎn)坐標(biāo)系與大地坐標(biāo)系之間的變換方程(包括旋轉(zhuǎn)矩陣和平移矩陣的各個(gè)分量)。此時(shí),只要隨機(jī)點(diǎn)亮室內(nèi)天花板上某一點(diǎn)光源,測(cè)得光點(diǎn)在三軸向CCD組件上的投影偏移,即可推算出叉車像點(diǎn)在大地坐標(biāo)系下的準(zhǔn)確位置。在倉(cāng)儲(chǔ)物流環(huán)境中,有效、實(shí)時(shí)地定位無(wú)人叉車在室內(nèi)的精準(zhǔn)位置,將有助于提高物流配送與控制效率,對(duì)物流產(chǎn)業(yè)有極大的促進(jìn)作用。