履帶式拖拉機運動控制系統設計與試驗
2019-05-24 09:48:28宋裕民梁健明邱緒云李愛娟趙林亭
農機化研究 2019年7期
宋裕民,梁健明,邱緒云,李愛娟,趙林亭
(1.山東省農業機械科學研究院,濟南 250100;2.山東交通學院 汽車工程學院,濟南 250357)
0 引言
我國耕地面積廣闊,但種植效率與發達國家相比還處于一個較低的水平,且農業機械化程度不高,種植需要消耗大量的人力。隨著城鎮化進程的推進,農業人口的不斷流失,傳統種植模式的低效性問題越來越突出,因此亟待提升我國農業機械化程度,發展自動化和智能化的農業設備。拖拉機自動化技術可使燃油消耗下降、尾氣排放量減少,對能源、環境都有積極的作用[1-2]。目前,我國農機主要以人工操作為主,隨著對作業強度、精度和效率方面要求的不斷提高,人工操作已經難以滿足生產要求。因此,高精度自主導航、機械視覺導航和物聯網等相關技術的發展,使得無人駕駛拖拉機成為可能[3]。
拖拉機運動控制的相關技術研究廣受關注,趙建東等基于東方紅-250輪式拖拉機提出電控轉向系統設計方案[4];韓科立等對拖拉機定速巡航系統進行了相關研究[5];楊柳等設計了一輪式拖拉機通用自動駕駛系統,可實現轉型和油門調節功能[6]。
本文針對履帶式拖拉機運動控制問題,提出在傳統柴油發動機驅動拖拉機底盤上搭載電子油門控制裝置和電控液壓轉向裝置的設計方案。該系統可在遠距離接收運動指令,且按照指令安全可靠平穩地完成固定角度轉向、加減速、定速及停車等操作,且能實時反饋拖拉機的狀態信號。
1 系統總體設計及組成部分
該系統搭載在一小型柴油發動機驅動履帶式拖拉機上,包括信號處理器、拖拉機運動控制器、無線通信模塊、電子油門裝置、電控液壓轉向裝置、發動機轉速傳感器和六軸運動傳感器等,如圖1所示。工作時,433MHz無線模塊接收調試遙控器或上位機發出的運動軌跡指令,信號處理器結合無線模塊信號和其他傳感器信號,對拖拉機運動控制器下達具體的操作指令,拖拉機運動控制器控制電子油門控制裝置和電控液壓轉向裝置協同完成運動軌跡指令;2.4GHz無線模塊實時向上位機反饋拖拉機運動狀態。
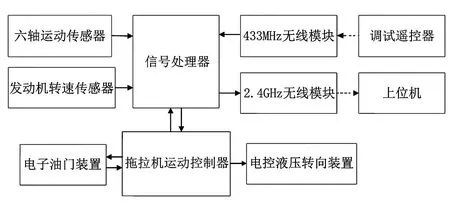
圖1 系統結構圖Fig.1 System structure diagram
1.1 電子油門裝置
電子油門裝置由拖拉機運動控制器控制,實現調節發動機油門開度的功能,由油門控制電機、直滑電位器、鋼絲、工字輪和導線吊環等組成,如圖2所示。工作原理:通過油門控制電機的轉動,帶動纏繞在工字輪上鋼絲收放,從而使發動機上油門拉桿上下運動,實現發動機油門開度的調節。油門調節電機動力輸出軸用聯軸器連接著兩個工字輪,一個為收線輪,另外一個為放線輪。兩個工字輪上的鋼絲纏繞方向相反,鋼絲正向纏繞著前端工字輪,油門拉桿固定在鋼絲上,隨著鋼絲拉動而上下運動,鋼絲經過導環后再回到后端工字輪。油門控制電機正向轉動時,前端工字輪收線,后端工字輪放線,將油門拉桿往下拉;反之,油門拉桿被往上拉。直滑電位器實時測量油門拉桿的位置,并將信號返回給拖拉機運動控制器,實現閉環控制。
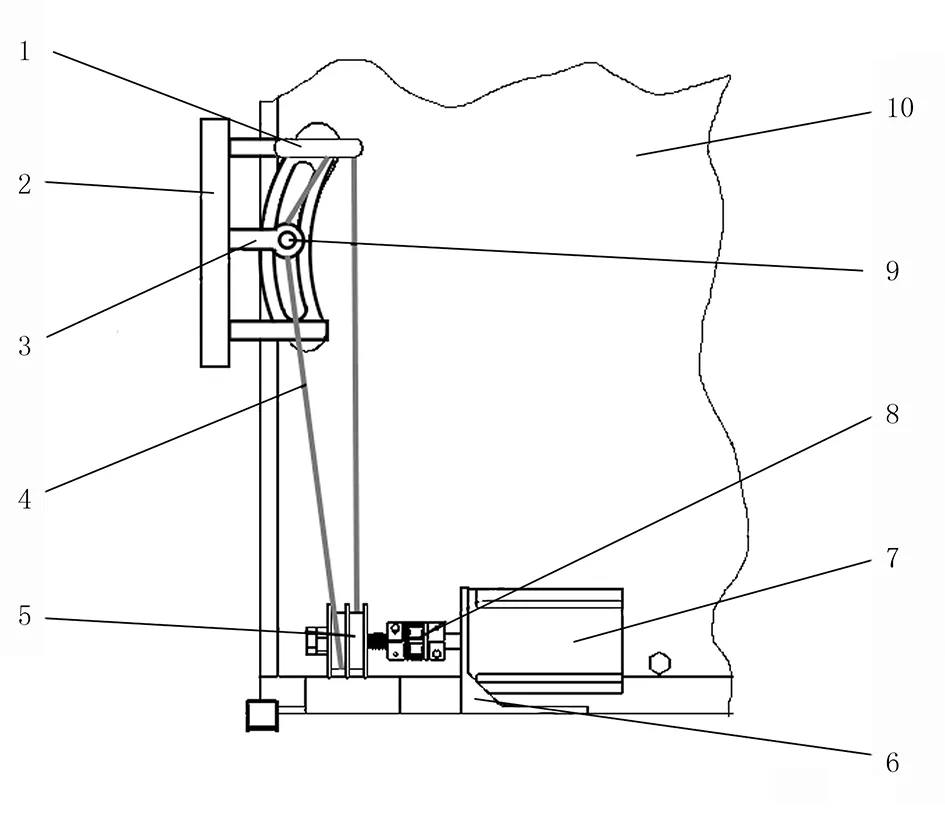
1.導線吊環 2.直滑電位器 3.直滑電位器推桿 4.鋼絲 5.工字輪 6.電機支架 7.油門控制電機 8.聯軸器 9.油門拉桿 10.發動機圖2 電子油門裝置結構簡圖Fig.2 Structure diagram of electronic throttle device
油門控制電機需要克服油門拉桿的復位力、鋼絲運動過程受到的摩擦阻力和外部的干擾力等。經測試,油門拉桿從上止點到下止點運動過程中,所需要最大拉力不超過100N。電子油門控制電機需要準確轉動鋼絲,控制鋼絲的收放使油門拉桿上下移動,為實現預期效果,且考慮電機體積、功耗和成本等因數,選用了一款57步進電機。電機型號為57HS22,額定電流為3A,最大輸出轉矩2.3N·m,配套的電機驅動型號為TB6600,可在9~42V的直流電源下工作,具有過流、過壓、欠壓及短路等保護功能。
鋼絲拉動油門拉桿運動,需要克服油門拉桿的復位力、油門拉桿與軌道的摩擦阻力和鋼絲與導線吊環的摩擦阻力。由于總的合力不大,但考慮到工作環境復雜和使用壽命等因數,鋼絲不宜太細,最終選用粗1.2mm的鋼絲。
直滑電位器用于測量油門拉桿的運動位置,油門拉桿從上止點運動到下止點的運動行程約85mm。ALPS直滑電位器測量范圍為100mm,阻值為10kΩ,符合測量要求。該直滑電位器上有3個引腳,分別為VCC、GND和測量信號引腳。拖拉機運動控制器給直滑電位器供電后對測量信號引腳做A/D采集即可測得油門拉桿位置。該直滑電位器滑桿運動位移與其阻值并非線性關系,使用前需重新標定。
工字輪槽部直徑40mm,要將油門拉桿從上止點拉到下止點,工字輪需轉約0.68圈,即244°。
1.2 電控液壓轉向裝置
電控液壓轉向裝置由液壓泵、泄流閥、3個電磁換向閥和兩個柱塞缸組成,如圖3所示。該液壓系統中液壓泵由發動機通過皮帶輪帶動工作。電磁換向閥的通斷由拖拉機運動控制器通過繼電器電路控制。柱塞缸安裝在拖拉機變速器上,通過向拖拉機變速器轉向搖臂施加作用力,替代手動控制轉向搖臂完成拖拉機轉向。
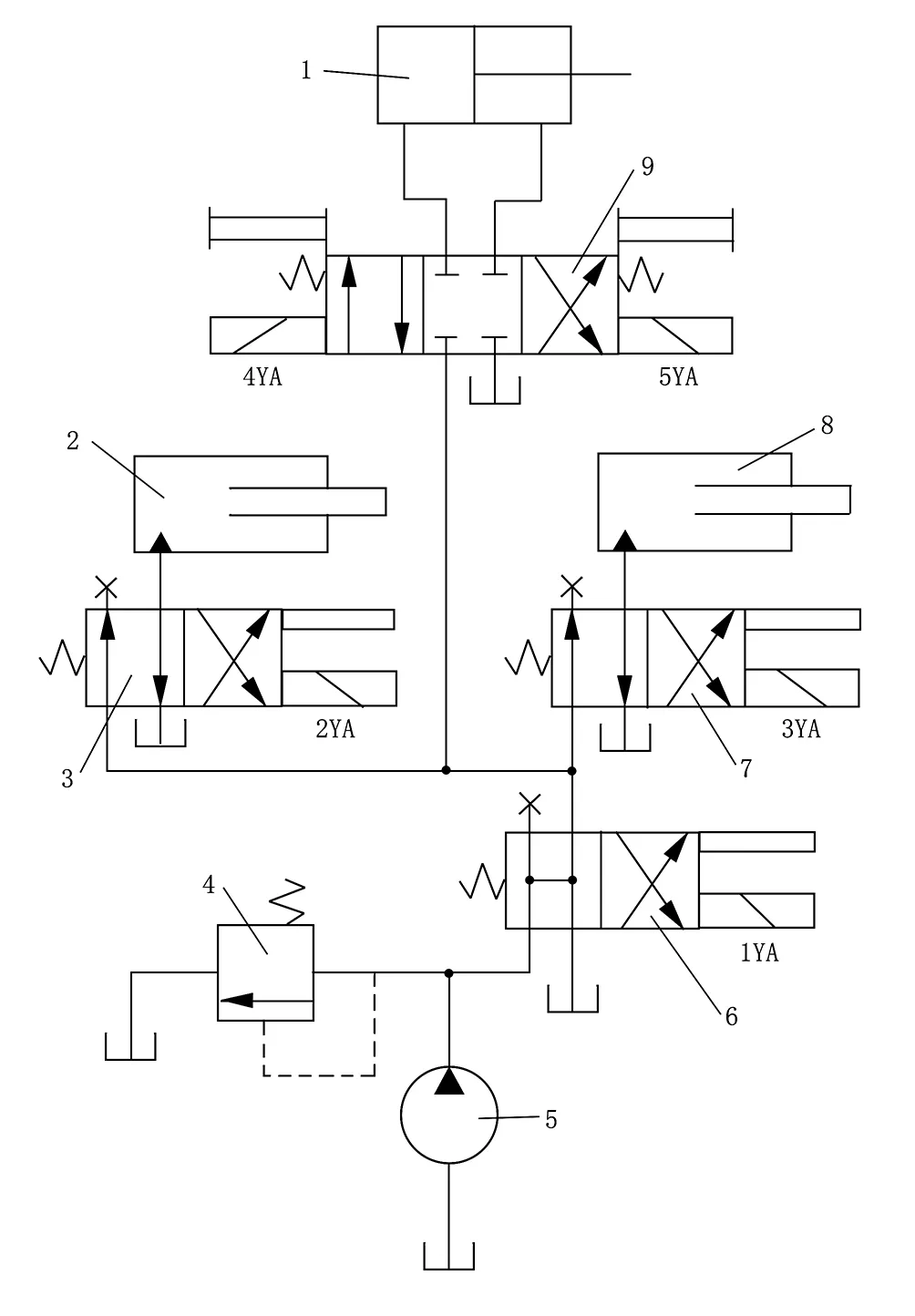
1.農具控制液壓缸 2.左轉柱塞缸 3.左轉電磁換向閥 4.泄流閥 5.液壓泵 6.總控電磁換向閥 7.右轉電磁換向閥 8.右轉柱塞缸 9.農具控制電磁換向閥圖3 液壓控制系統原理圖Fig.3 Schematic diagram of hydraulic control system
具體工作原理如下:
1)左轉。拖拉機運動控制器驅動1YA和2YA,液壓泵供油液通過電磁換向閥6和電磁換向閥3向柱塞缸2供油,柱塞缸將拖拉機變速器上左轉搖臂頂起,拖拉機右履帶動力切斷,拖拉機開始左轉;拖拉機運動控制器切斷1YA和2YA電源,液壓泵對柱塞缸2的供油被切斷,柱塞缸在左轉搖臂的復位力作用下復位,拖拉機右履帶動力恢復,拖拉機恢復直線行駛。
2)右轉。拖拉機運動控制器控制1YA和3YA的電源通斷,從而控制柱塞缸供8的工作狀態,實現左履帶的動力切斷與恢復。
3)停車。拖拉機運動控制器驅動1YA、2YA和3YA,液壓泵供油液同時為柱塞缸2、柱塞缸8供油,拖拉機變速器上左轉搖臂和右轉搖臂同時被頂起,左右履帶動力同時被切斷,拖拉機停車。
在整車液壓系統中還包括了對農具升降控制部分。農具的升降是通過電磁換向閥9和液壓缸4實現的。電磁換向閥9是一個三位四通閥,拖拉機運動控制器可通過控制4YA和5YA的通斷實現農具的升降和任意高度停止。
1.3 拖拉機運動控制器
拖拉機運動控制器接收信號處理器指令,控制電子油門裝置和電控液壓轉向裝置,完成拖拉機的加減速、左右轉向和停車運動。電子油門裝置的主要被控對象是油門控制電機,油門控制電機由步進電機驅動器TB6600驅動。電控液壓轉向裝置的被控對象是電磁換向閥,電磁換向閥的控制通過繼電器電路實現。
拖拉機運動控制器基于STM32F103RCT6設計,該芯片最高72MHz工作頻率,擁有48KB SRAM、256KB FLASH、2個基本定時器、4個通用定時器、2個高級定時器、2個DMA控制器、3個12位ADC,以及51個通用IO口,可在-40~+105℃的溫度范圍下工作。其具有資源豐富、功耗低和性價比高等特點。
如圖4所示:步進電機驅動TB6600分別接收拖拉機運動控制器的電機工作頻率信號、電機轉動方向信號和電機使能信號,通過這3個信號分別可以控制電機的轉動速度、轉動方向和轉停狀態。電機工作頻率信號通過使能通用定時器產生,修改定時器的溢出時間實現對電機轉動速度的修改。向TB6600輸入高電平電機轉動方向信號,電機順時針轉動;反之,電機逆時針轉動。油門拉桿的位置定位通過安裝在油門拉桿軌道旁邊的直滑電位器完成。標定好的直滑電位器推桿位移與電阻變化為線性關系,直滑電位器兩端供3.3V電壓,對測量引腳做AD采集獲得穩定可靠的油門拉桿位置信號。拖拉機運動控制器根據該信號來判斷油門控制電機的轉停和正反轉。為保證油門控制電機高精度工作,對油門拉桿位置信號的AD采集精度要高并且轉換速度要足夠快。STM32F103RCT6主控芯片中集成了3個12位的ADC,最大的轉換速度為1MHz,滿足設計要求。
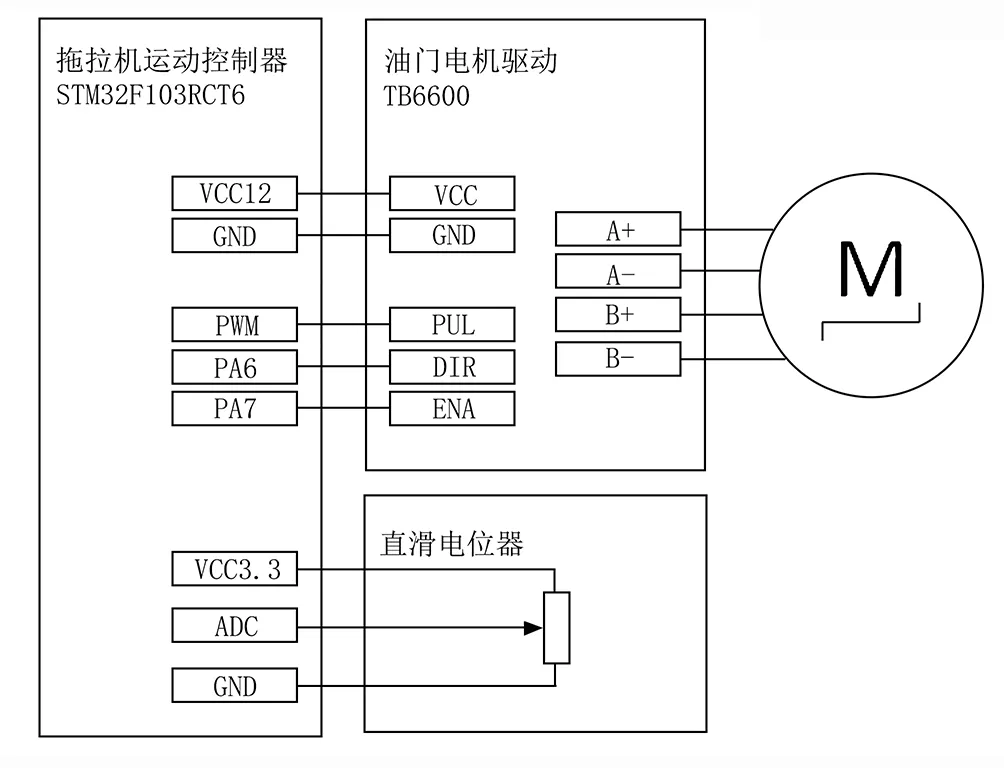
圖4 油門控制電機電路圖Fig.4 Throttle control motor circuit
電控液壓轉向裝置的控制,通過繼電器電路來完成。拖拉機運動控制器上集成了12個繼電器。其中,5個用于控制拖拉機液壓系統中的4個電磁換向閥,實現拖拉機的轉向、啟停和農具升降;另外的7個預留于其他功能的擴展。電磁換向閥3的型號為DSG-01-2B3B-D12-N1-50,電磁換向閥4和電磁換向閥5的型號為DSG-01-2B2-D12-N1-50、電磁換向閥8的型號為DSG-01-3C2-D12-N1-50。4個電磁換向閥都是直流12V電壓驅動,允許電壓變化范圍10.8~13.2V,適合使用拖拉機上的電源系統供電;因保持電流為2.45A,拖拉機運動控制器上的繼電器電路需提供足夠的電流來維持電磁換向閥工作。
繼電器電路主要由主控芯片STM32F103RCT6、光耦芯片TLP281-4、達林頓三極管陣列芯片MC1413和繼電器SRD-12VDC-SL-C組成,如圖5所示。該電路由主控芯片上的通用IO口觸發,信號通過TLP-281-4的光耦隔離后,觸發MC1413將繼電器線圈一端拉低,繼電器線圈產生磁場,將連接電磁換向閥的公共端與常閉端分離,連接12V電源的常開端接合,電磁換向閥通電。
1.4 信號處理系統
信號處理系統包括信號處理器、無線模塊和傳感器。信號處理器接收傳感器和無線模塊信號,向拖拉機運動控制器下達控制指令和向上位機返回拖拉機狀態信號。信號處理器主要負責信號的接收和發送,考慮到程序調試的簡便性和硬件升級頻繁等因數,所以將信號處理獨立于拖拉機運動控制器之外。
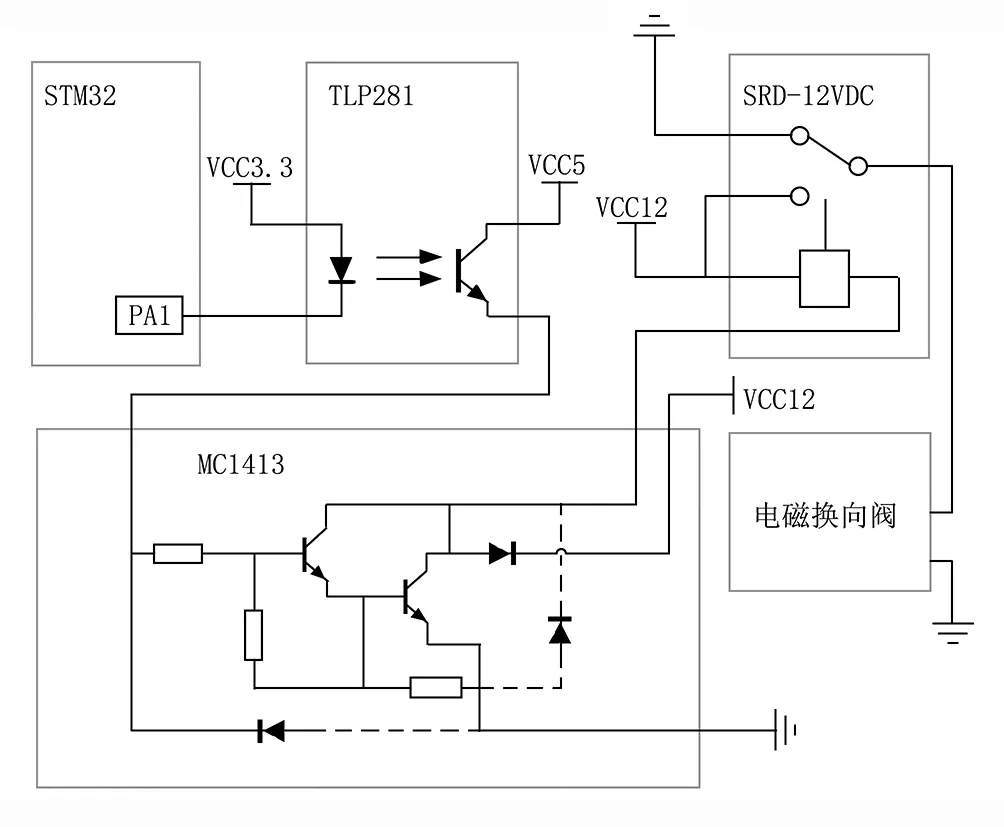
圖5 繼電器控制電路圖Fig.5 Relay control circuit diagram
該信號處理器基于STM32F103RCT6芯片設計,需要處理六軸運動傳感器對拖拉機實時轉向角度的測量和發動機轉速的測量。六軸運動傳感器型號為ATK-MPU6050。該傳感器采用InvenSense公司的MPU6050芯片作為核心,芯片內部整合了3軸陀螺儀和3軸加速度傳感器,并可利用自帶的數字運動處理器硬件加速引擎,通過主IIC接口向主控芯片輸出姿態解算后的數據。其陀螺儀最大測量范圍為±2 000°/s,最大分辨率為131LSB/(°)·s-1。加速度傳感器最大測量范圍為±16g,最大分辨率為16 384LSB/g,通信速率為400kHz。考慮到車身震動對測量的影響,六軸運動傳感器安裝在車架中部位置。發動機轉速傳感器型號為E18-D80NK,為光電型傳感器,安裝在發動機飛輪旁的車架上。該傳感器通過檢測一定時間內發動機飛輪上的孔洞經過次數來計算發動機轉速,響應時間小于2ms,發動機最高轉速為2 200r/min,傳感器能夠滿足測量要求。
連接信號處理器的兩個無線模塊,分別是AS32-TTL-100和AS69-T20。其中,AS32-TTL-100無線模塊采用SX1278芯片100mW的工業級無線數傳模塊,其編碼效率高,糾錯能力強;工作頻率為410~441MHz,采用TTL電平輸出。該模塊為半雙工通信模塊,用于接收調試遙控器發出無線信號。AS69-T20模塊工作頻率為2.4GHz,最大波特率為115 200,可不限包長連續全雙工傳輸,用于向上位機高速發送大量的拖拉機實時狀態數據,拖拉機運動控制器如圖6所示。
信號處理器和拖拉機運動控制器間使用USART進行高速通信,信號處理器向拖拉機運動控制器下達運動指令,拖拉機運動處理器向信號處理器返回運動指令執行情況;信號處理器接收無線模塊的外部控制信號,命令拖拉機運動控制器配合六軸運動傳感器和發動機轉速傳感器完成精確的轉向運動。

圖6 拖拉機運動控制器Fig.6 Tractor motion controller
2 試驗設計與結果
2.1 電子油門響應特性測試
拖拉機平臺上搭載常柴L24-2柴油發動機,標定功率為17kW,標定轉速為2 200r/min。其中,油門拉桿行程約為85mm。本試驗通過對比油門拉桿實際位置和命令的期望位置來反映電子油門的響應特性。其中,油門拉桿實際位置用電子油門控制裝置中的直滑電位器進行測量,并使用ACS712電流傳感器對油門控制電機的工作電流進行實時監測;信號處理器將采集的直滑電位器信號、電流傳感器信號和接收到的期望命令信號通過AS69-T20無線通信模塊發送到上位機。在發動機沒有啟動的情況下,以上止點為原點,油門拉桿向下運動油門增大為正方向。信號處理器向拖拉機運動控制器發送的期望信號是先從油門拉桿的上止點階躍到離原點80mm接近下止點位置,經過一段時間后從階躍回上止點,如圖7所示。
由圖7可知:拖拉機運動控制器在2.57s接收到油門增大到80mm位置的控制指令,經過0.13s后油門拉桿開始被油門控制電機往下拉;從接收到命令到油門拉桿第一次經過80mm的目標位置的時間為0.88s,峰值時間0.93s,超調量3.1%,調節時間0.96s,控制效果較好,油門拉桿最快運動速度達90.1mm/s;在8.07s接收到油門拉桿復位到上止點命令,用時0.88s到達1.5mm位置后向不斷向上止點位置靠攏,短時間內沒有完全復位。電流傳感器的測量結果顯示:油門控制電機穩定電流為0.76A,轉動時,電流在2.5A上下波動,電流峰值接近3A,油門控制電機沒有出現過載情況。
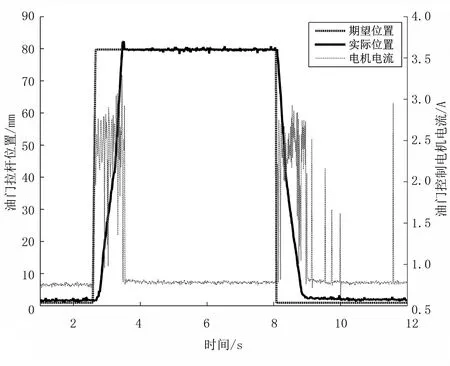
圖7 電子油門響應特性測試結果Fig.7 The result of electronic throttle response characteristic test
為測量發動機轉速在電子油門控制下實際效果,通過發動機轉速傳感器測量在2.55mm/s和76.5mm/s的速度下將油門拉桿從8.5mm的發動機最低穩定轉速位置增加到80mm位置的發動機空載轉速響應特性,如圖8所示。
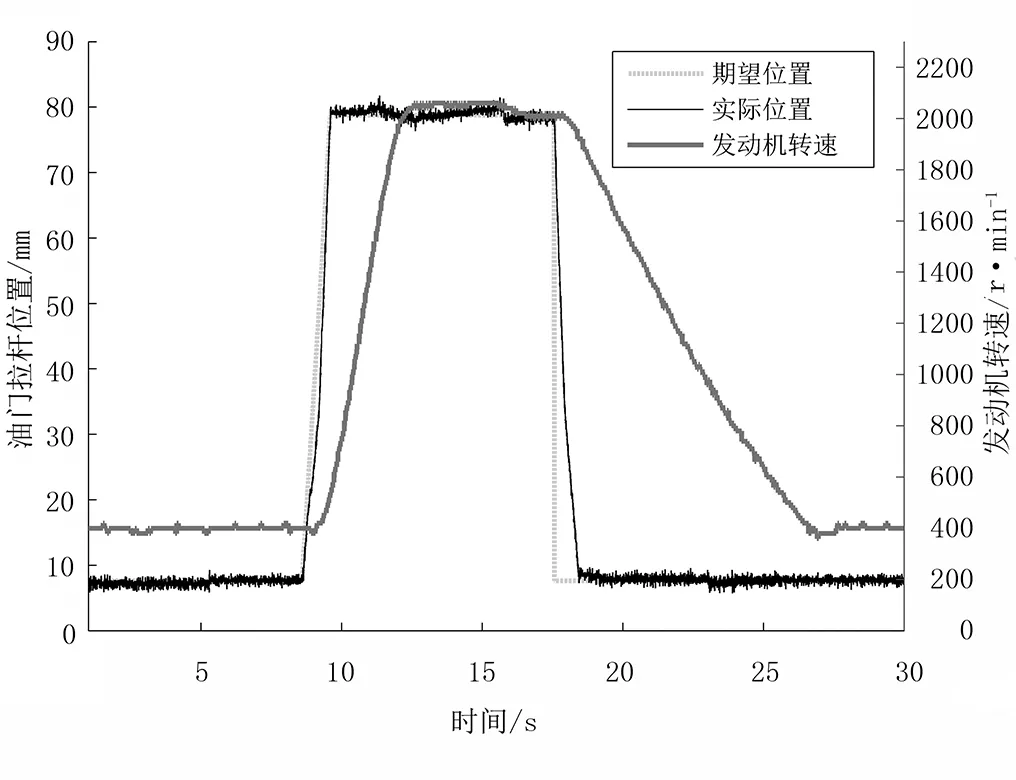
圖8 76.5mm/s油門拉桿增速發動機轉速響應特性測試結果Fig.8 Test results of engine speed response characteristics at 76.5mm/s throttle Rod growth
由圖8可知:拖拉機運動控制器在8.6s接收到以76.5mm/s增大的斜坡型油門位置信號,發動機轉速在9.1s時開始明顯增大,最終穩定在2 020r/min,用時3.6s;在17.5s拖拉機運動控制器接收到油門拉桿復位信號,發動機轉速在18.1s開始下降,經過9.1s穩定在400r/min。在以2.55mm/s增大的斜波型油門位置信號測試結果如圖9所示。隨著油門拉桿的勻速增大,發動機轉速初期增速較快,后期增速較緩慢。圖7與圖8對比發現:發動機啟動情況下的測試結果中油門拉桿實際位置在穩定狀態下有約2mm的波動,明顯比在發動機熄火測試結果大。據分析,該波動現象由發動機的震動和發電機供電的紋波電壓造成。
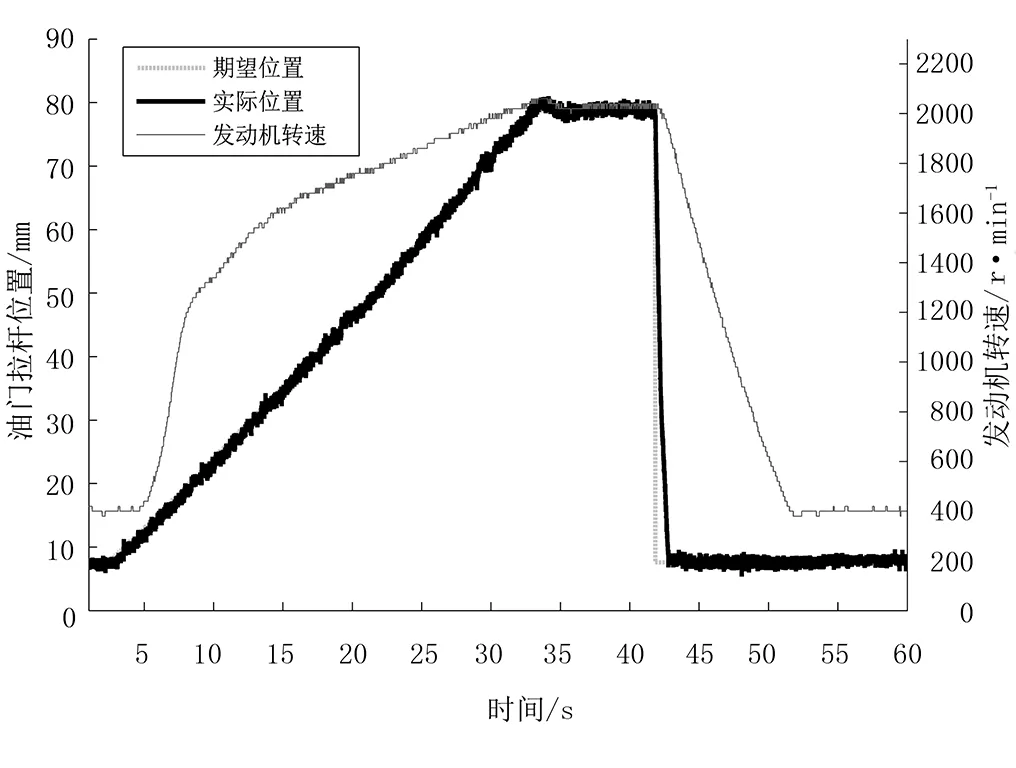
圖9 2.55mm/s油門拉桿增速發動機轉速響應特性測試結果Fig.9 Test results of engine speed response characteristics at 2.55mm/s throttle Rod growth
測試結果表明:電子油門裝置對油門拉桿的控制響應速度快,控制精確,油門控制電機沒有過載情況;發動機轉速響應速度較慢,電子油門裝置要對發動機轉速實現精確控制還需要優化控制算法;電子油門裝置需要改進抗震性能和提高電源的濾波效果。
2.2 電控液壓轉向裝置響應特性測試
拖拉機的轉向方式為切邊轉向,單邊履帶接地面積長700mm、寬150mm,兩邊履帶中心距790mm。拖拉機在平整的混凝土路面上,發動機以最低穩定轉速行駛,當車速穩定后,進行360°轉圈。對拖拉機轉圈留在地面上的轉向痕跡多次測量。得到該拖拉機底盤最小轉彎半徑為926mm,如表1所示。
表1 轉向半徑測試結果
Table 1 Test result of turn radius
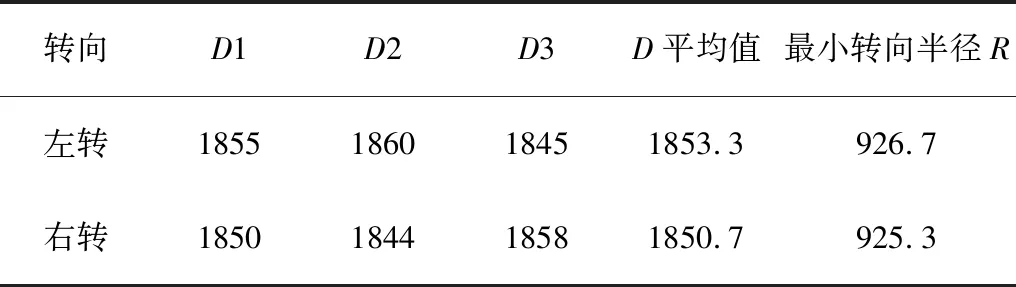
mm
電控液壓轉向裝置響應特性測試過程,拖拉機在平整的混凝土路面上,發動機穩定在一定轉速時,信號處理器向拖拉機運動控制器發送一個特定轉向角度的轉向指令;信號處理器向上位機返回發動機轉速信號,六軸運動傳感器對實時轉向角度的測量信號和拖拉機運動控制器對轉向指令的執行狀態信號。
圖10為發動機轉速約1 600r/min情況下,調試遙控器發出持續1.34s轉向指令的測試結果。拖拉機控制器接收到轉向指令約0.15s后開始轉向,當停止發送轉向指令后約0.3s拖拉機轉向運動停止,恢復直線行駛。對多組不同發動機轉速下進行轉向測試結果表明:當轉向指令停止發送后,電控液壓轉向系統的停止轉向滯后時間穩定在0.32s。
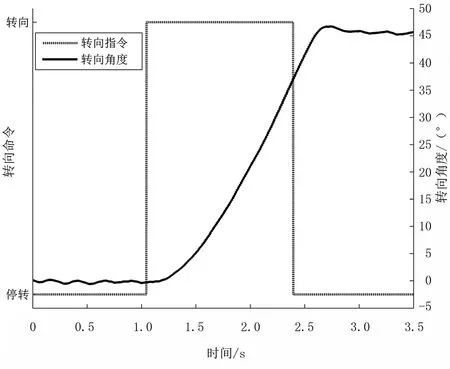
圖 10 電控液壓轉向裝置響應特性測試結果Fig.10 Test results of response characteristics of Electro-hydraulic steering device
根據電控液壓轉向系統的停止轉向滯后時間和實時轉向角速度設計提前停止發送轉向命令的固定角度轉向算法,并進行60°轉向試驗和90°轉向試驗。
固定角度轉向測試都是在發動機轉速約2 000r/min,水平混凝土路面下進行;60°轉向試驗轉向角度穩定在57°,90°轉向試驗轉向角度穩定在91°。經多組測試數據分析,轉向誤差為±3°,如圖11所示。
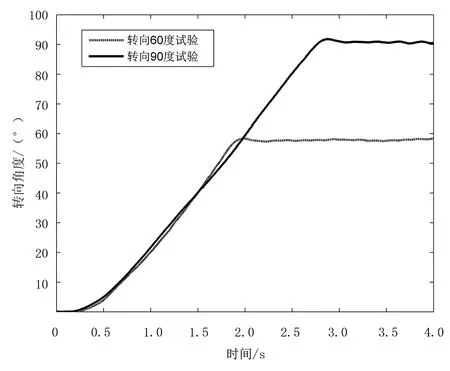
圖11 固定角度轉向測試結果Fig.11 Test results of fixed angle steering
2.3 無線模塊信號穩定性測試
該測試由發射機和接收機共同完成,考慮到在拖拉機控制系統中,無線模塊只需要進行單向傳輸,所以在測試設計中,由發射機在1s內發送100個8字節帶公差為1的等差數列信息數據;接收機通過分析前后接收到的兩個數據之間的差值來判斷中間丟失或損壞的數據個數。
在測試中,AS69-T20與信號處理器通信波特率為115 200,發射功率20dBm,工作頻率為2.405GHz。AS69-T20外接TX2G4-JKA-020傳輸天線,該天線長195mm、直徑12mm,增益6dBi,功率容量5W,駐波比小于1.5。AS32-TTL-100測試頻率為441MHz,與信號處理器通信波特率為9 600,空中速率為19.2kbps,發射功率20dBm。AS32-TTL-100選用TX433A-XP100天線,該天線長180mm,增益3dBi,駐波比小于1.5。2.4GHz和433MHz無線模塊信號穩定性測試結果如圖12和圖13所示。
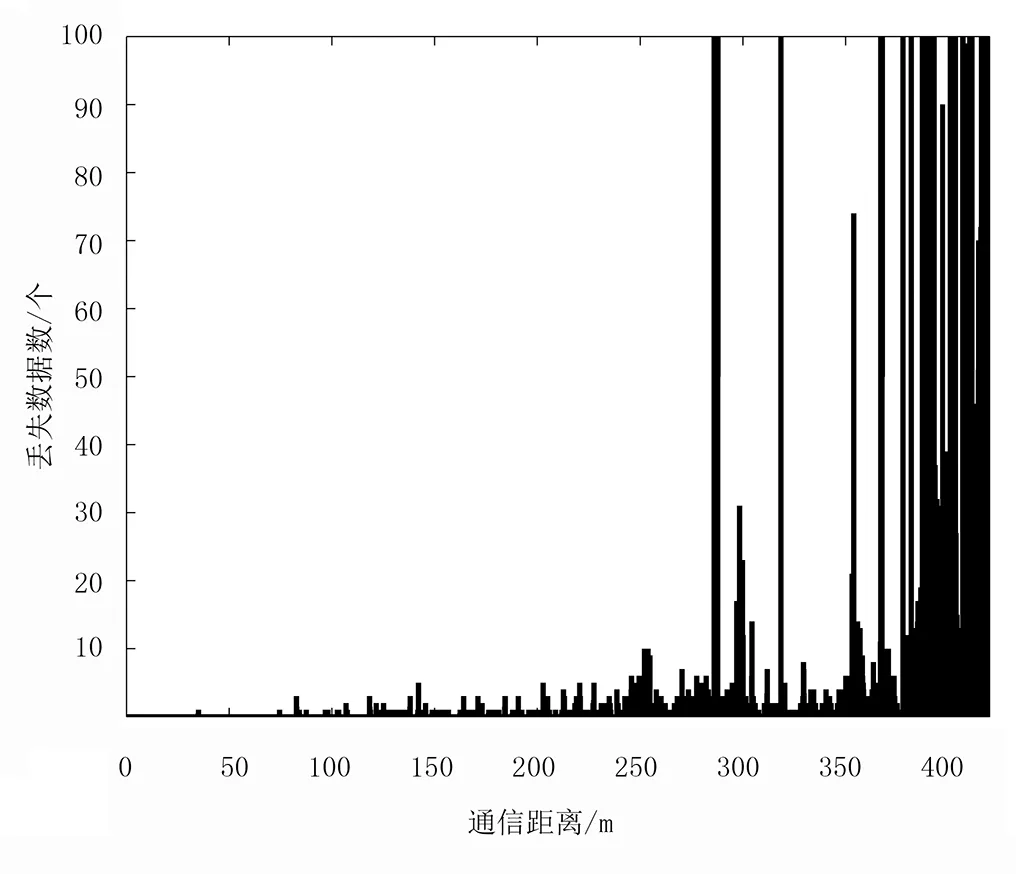
圖12 2.4GHz無線模塊信號穩定性測試結果Fig.12 Signal stability test results of 2.4GHz wireless module
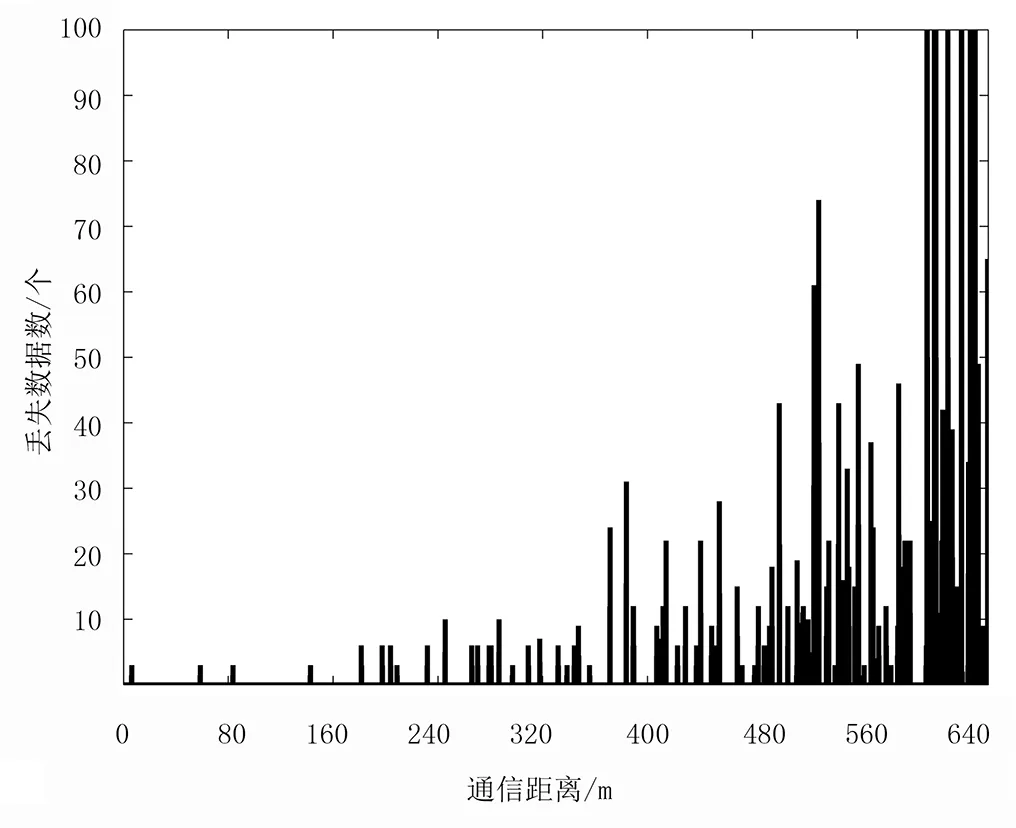
圖13 433MHz無線模塊信號穩定性測試結果Fig.13 Signal stability test results of 433MHz wireless module
測試場地空曠,沒有阻擋的障礙物,測試高度均為1.2m,環境溫度約為5℃;每2m為一個測量點,發射機在每個測試點發送100個數據;接收機接收到數據,將分析結果上傳到上位機。
由圖12和圖13可知:AS69-T20在200m的通信距離內,每秒數據丟失數小于10個,傳輸效果較好;當通訊距離大于250m時,數據丟失情況嚴重;大于400m時,接收機幾乎接收不到數據。AS32-TTL-100在350m的通信距離內丟失數據個數只有少數測試點超過10個,通信距離大于600m時,數據丟失情況嚴重。
3 結論
1)研制了一種基于柴油發動機驅動履帶式拖拉機的運動控制系統,可接收調試遙控器或上位機指令,通過電子油門裝置和電控液壓轉向裝置可實現拖拉機的加減速和轉向功能,配合發動機轉速傳感器和六軸運動傳感器可進行固定角度轉向,并將拖拉機狀態信號實時上傳到上位機。
2)試驗表明:電子油門控制裝置對油門拉桿位置的控制精度高和響應速度快,電控液壓轉向裝置有0.32s的停止轉向滯后,通過控制算法配合六軸運動傳感器的角速度信號可減少滯后對轉向角度產生的誤差。固定角度轉向偏差可控制在±3°,無線調試遙控器控制距離350m,向上位機狀態數據上傳的有效距離200m,可在200m內對拖拉機進行運動控制并實時監測拖拉機運動狀態。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17