速度信息缺失的平動點軌道交會預設性能控制
2019-06-05 03:31:10鄭丹丹羅建軍殷澤陽袁建平
宇航學報 2019年5期
關鍵詞:方法
鄭丹丹,羅建軍,殷澤陽,袁建平
(1.西北工業大學航天學院,西安 710072;2.航天飛行動力技術重點實驗室,西安 710072)
0 引 言
近年來,隨著平動點動力學性質研究的不斷深入,平動點軌道展現出巨大的應用前景[1-2]。世界各國已經發射和正在構想多個平動點觀測平臺和載人空間站,例如ISEE-3[3]、Wind、SOHO、ACE、MAP、Genesis[4-6]。這些大型航天器的費用高昂,如果發生故障就直接廢棄則代價過大,因此需要在軌進行交會對接、維護等操作;更為重要的是,由于平動點軌道非常不穩定,在平動點軌道的不穩定流形方向稍加擾動,處于平動點軌道的高速旋轉故障航天器便會在較短時間內偏離軌道,到達地球附近并高速進入大氣層,將嚴重威脅近地空間航天器的安全。因此,研究平動點軌道航天器的交會對接,對于平動點軌道附近航天器的攔截、修復、營救是至關重要的,并且平動點空間飛行器維護系統的成功,將帶動深空航天器的重復使用,降低航天成本。
由于平動點軌道重要的應用前景,一些學者對平動點軌道的交會問題進行了研究。Jones[7]對圓型限制性三體問題(CRTBP)中的末段交會問題進行了研究。所提出的制導律實際上是一種兩沖量轉移策略,僅適用于小幅值的Halo軌道和較近距離交會問題。Marinescu等[8-9]研究了燃料最優小推力交會問題,但交會目標是平動點本身,且僅研究了二維情形。Volle[10]采用變脈沖策略研究了Halo軌道間的交會軌跡規劃問題,并在擾動情況下考慮了交會時間和參數之間的影響。Yuri[11]利用擬脈沖集方法實現了地月L2Halo軌道的交會。這些平動點軌道交會采用的方法是開環最優控制方法,也沒有充分考慮導航誤差、其他行星的引力、測量誤差、推力約束等因素。由于平動點軌道自身的不穩定性,在交會過程中有必要考慮這些因素對平動點軌道交會的影響。Lian等[12]利用滑模控制理論研究了地月平動點軌道的交會問題;Peng等[13]利用最優線性反饋控制方法研究了平動點之間的小推力交會問題。通過與開環最優控制方法的仿真結果進行對比,證明了閉環反饋控制在平動點軌道交會中的潛在優勢。上述工作均是在相對運動全狀態已知的情況下開展的。
國際深空互操作標準草案C-2018組合草案文件[14]指出深空航天器交會出現的突發性狀況包括光學敏感器出現故障。因此如果測量敏感器出現故障不能提供速度測量信息,如何實現平動點軌道航天器的安全精確交會是值得深入研究的問題。傳統方法一般采用數字差分來近似地估計相對位置的導數,從而得到相對速度狀態,但是平動點軌道相對運動存在擾動和測量噪聲,而差分方法具有放大噪聲的特性,難以正確地估計出高精度的相對速度狀態。針對近地軌道缺乏相對速度信息的交會問題,He等[15]采用了有限時間收斂的狀態觀測器對相對速度信息進行觀測,并設計控制律實現了近地軌道航天器的自主交會。但是這種微分器,噪聲存在于每一層微分方程中,且不能被充分抑制。而平動點軌道航天器對相對速度狀態的精度要求比較高。Wang等[16]提出一種三階積分鏈微分器(TICD),該微分器不僅能夠高精度地估計原系統的未知狀態,而且在對不確定項進行逼近的同時還能抑制噪聲。本文擬采用TICD對平動點周期軌道相對運動的速度狀態進行估計。
低復雜度預設性能控制(LPPC)[17]方法是近年來發展起來的一種現代控制方法,從提高系統性能的角度進行控制器設計,可確保跟蹤誤差收斂到一個預設的任意小區域內,同時使收斂速度和超調量都滿足預設的條件。該控制方法可以針對模型具有強不確定性的情形,且控制器的設計僅依賴系統的狀態反饋,不需要進行大量的迭代計算。國內外學者采用該方法對軌跡和姿態跟蹤控制問題進行了探索和研究,均取得了良好的效果。Karayiannidis等[18]采用預設性能控制方法研究了機器人關節的位置跟蹤問題,文獻[19-20]利用LPPC方法研究了高超聲速飛行器參考軌跡跟蹤問題,殷澤陽等[21]利用LPPC方法研究了非合作航天器的視線跟蹤問題。傳統的LPPC方法設計穩態變量的約束條件時,需要事先知道初始誤差的符號,因此當改變初始值誤差時,一旦初始誤差的符號發生改變,就需要改變控制參數,實際操作過程繁瑣。
考慮到平動點軌道相對運動動力學的強非線性和強不確定性等特點,以及相對速度難以精確測量或傳感器故障造成相對速度測量信息缺失的工況,本文結合TICD和LPPC方法,研究無需相對速度測量信息的平動點軌道航天器交會的自主控制問題。①給出CRTBP的動力學模型和平動點附近的相對運動方程,并將其轉化成與控制方法相匹配的形式;②利用TICD估計相對運動速度;③根據初始誤差的不確定性提出,一種新的預設性能函數,取消了初始誤差符號要求已知的限制;④設計輸入狀態反饋控制器,并利用李雅普諾夫函數證明其穩定性;⑤通過仿真驗證本文所提方法的有效性和魯棒性。
1 動力學模型和約束條件
平動點周期軌道相對運動模型是航天器交會控制的基礎,而應用LPPC方法求取控制力需要具有直接反饋形式的模型。本節建立圓型限制性三體問題的平動點周期軌道相對運動模型,并將其轉化成非線性仿射直接反饋形式。
1.1 平動點軌道相對動力學模型


(1)
其中:
(2)
式中:Ωx、Ωy、Ωz分別表示勢函數Ω對x、y、z的偏導;Ω為航天器與兩主天體P1、P2的距離;r1、r2的表達式分別為:
(3)

(4)
式中:g=-I3×3;f=[F1F2F3]T;具體表達形式為:
(5)

(6)
設aper=[aΔxaΔyaΔz]T∈R3為時變擾動加速度,包含直接、間接引力以及外部干擾等,uC=[uCxuCyuCz]T∈R3為控制輸入。本文假設擾動加速度aper是有界未知的,這種假設是合理的:地月系統受太陽引力和太陽光壓的量級大約在10-7和10-9[22],即擾動加速度滿足不等式
|di|≤Di,i=Δx,Δy,Δz
(7)
1.2 約束條件和參數
本文考慮如下的約束條件:
1)未知擾動的形式。本文考慮的是深空平動點軌道附近的相對運動問題,空間中的外部擾動一般呈現周期性變化,因此可以表示成周期函數的形式[23]
aper=[a1sin(ω1t),a2cos(ω2t),
a3(sin(ω3t)+cos(ω4t))]T
(8)
式中:a1、a2、a3和ω1、ω2、ω3分別是x、y、z方向的擾動幅值及擾動頻率。
2)相對導航不確定性。兩航天器相對運動過程中需要不斷獲取相對運動狀態,而光學敏感器測量出的相對信息本身存在一定的誤差。這種誤差直接影響所需控制量的精度。假設相對導航誤差滿足均值為零的標準正態分布,則帶有導航不確定性的追蹤航天器的狀態可以表示為[23]
(9)

3)推力器故障。由于航天器特殊的運行環境和復雜的結構,推力器很容易出現失效的情況,直接表現形式就是控制加速度的變化,控制加速度的不確定性可以建模為[24]
uC=lCuC+δuC
(10)
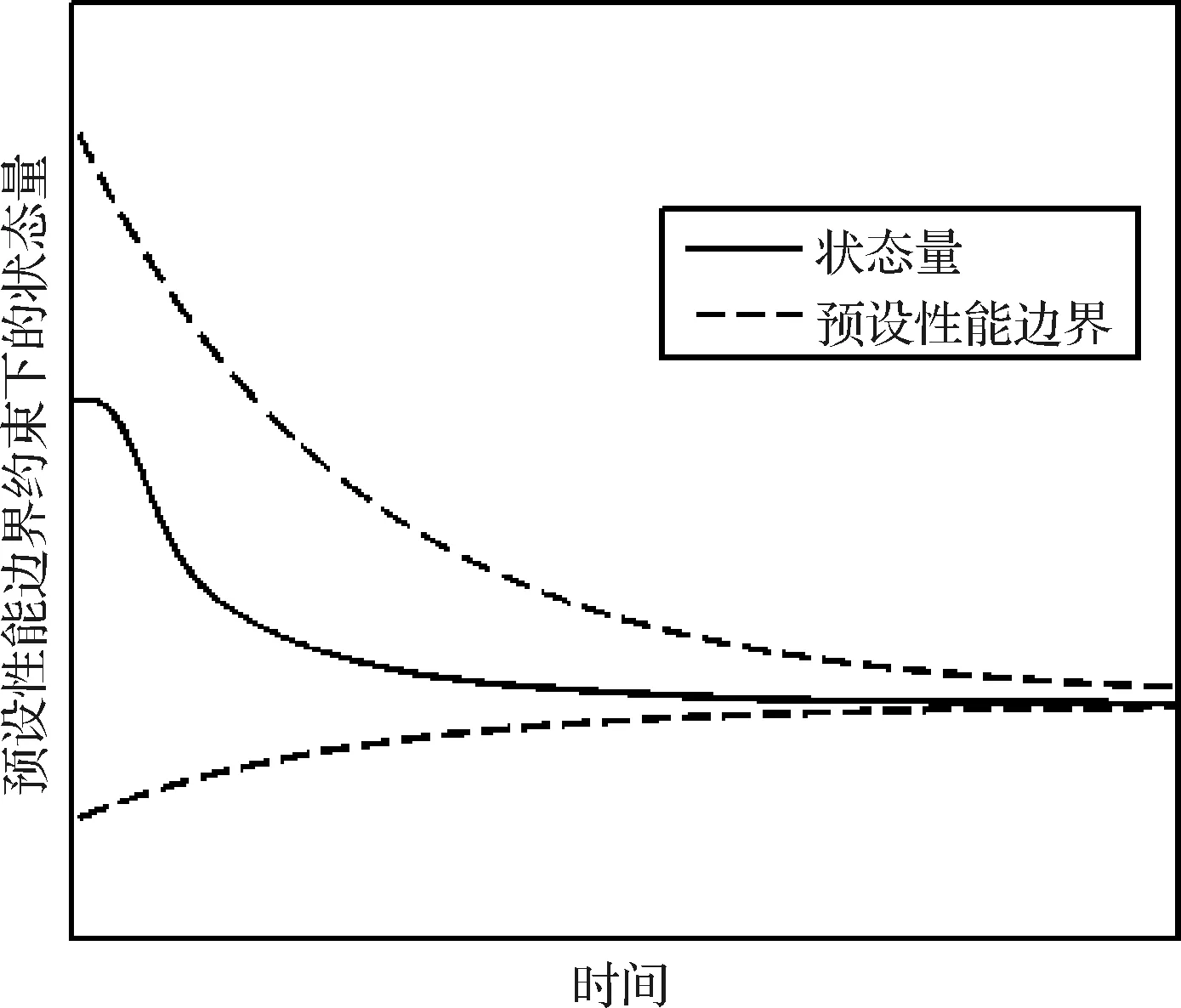
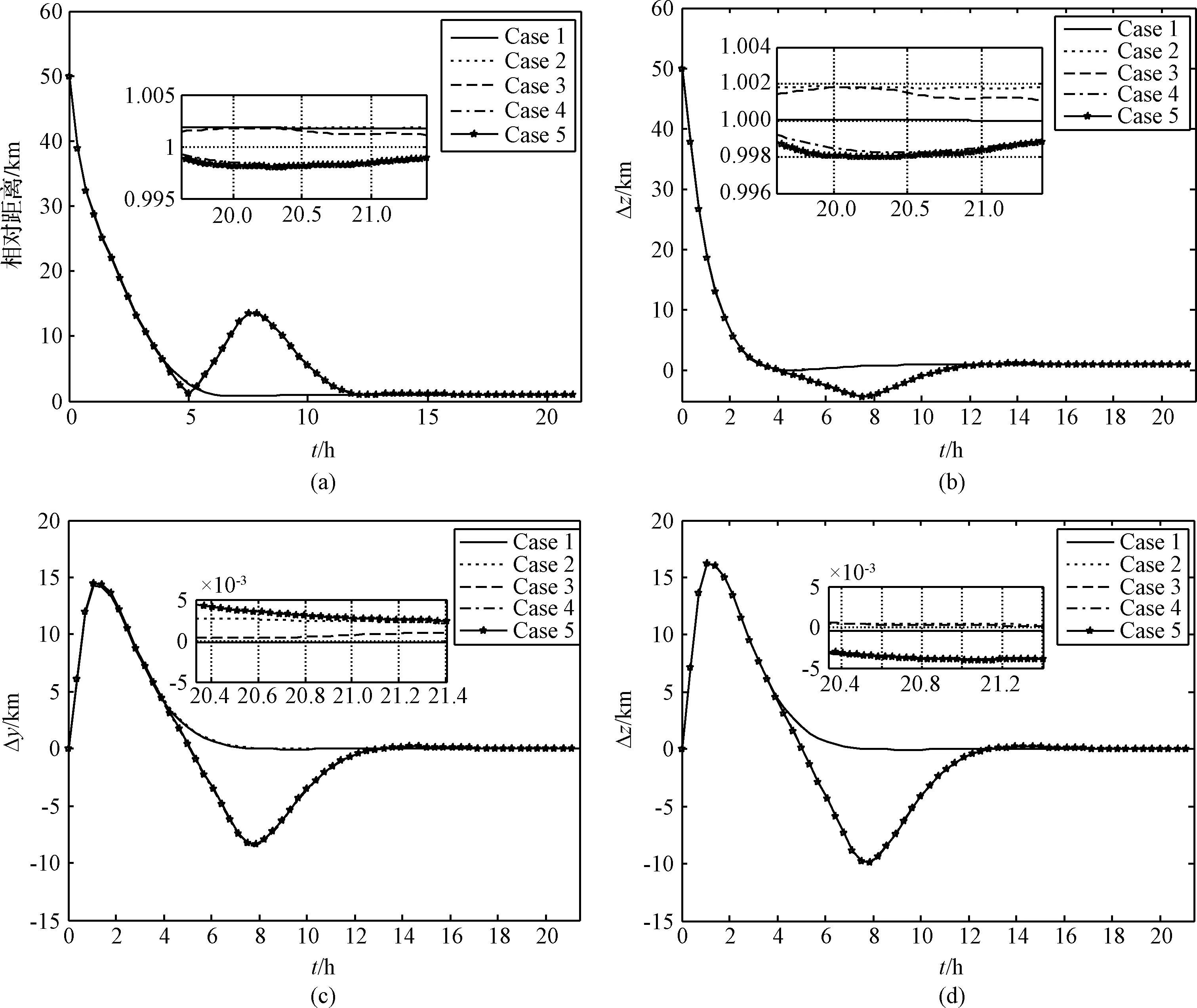
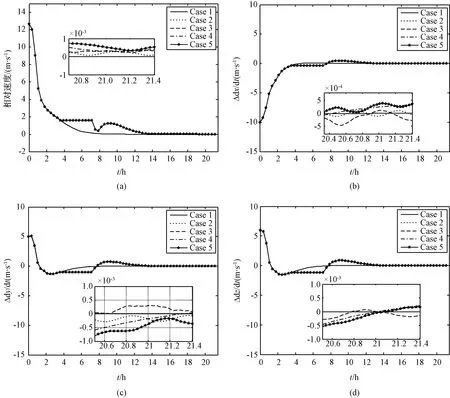
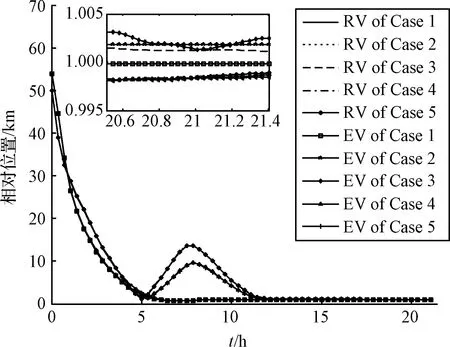
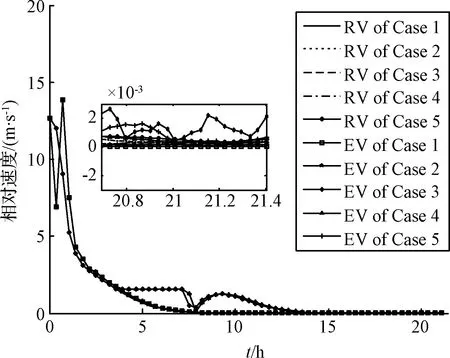
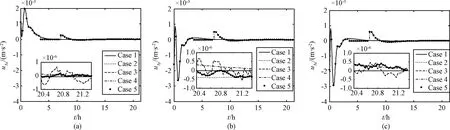
式中:lC=[lC1,lC2,lC3]T表示乘性故障,lCi=1,lCi=0,0 當考慮式(8)至(10)的不確定性時,平動點軌道交會軌跡跟蹤控制對控制方法的魯棒性要求比較高。 本節首先給出相對速度信息的估計方法,然后基于TICD估計出的相對速度信息和提出了新的預設性能函數設計航天器自主交會的控制器,在給出控制器設計之前,先給出分析控制器穩定所需的引理。 本文利用TICD來估計兩個航天器的相對速度。相對運動方程式(4)的TICD的形式為 (11) (12) 即使存在模型不確定、噪聲及外界擾動,TICD仍能有效地估計航天器的相對速度和相對加速度[16],由于高精度的要求,τ取的越小越好,但是過小的τ會使得由式(11)所得到的相對速度很容易會出現很大的超調。如果將由式(11)得到的相對速度用于系統的反饋控制,由于強烈的震蕩,會使整個閉環系統發散。因此本文設計如下變攝動參數 (13) 式中:m,1、2為大于零的常數;tmax為最大變化時刻。這樣能夠保證當0≤t≤tmax時,攝動參數τ的值比較大,從而使得相對運動方程的積分鏈微分器在初始階段由于攝動參數比較大,峰值現象可以得到抑制。隨著時間的推移,經過初始階段,τ值變得比較小,從而達到最小值,滿足相對運動狀態的高精度估計要求。 本文中相對導航的誤差滿足正態分布函數,因此初始誤差的正負號未知,而低復雜度預設性能控制方法要求已知初始誤差的符號。為避免頻繁調參,本文提出一種新的無需初始誤差的預設性能函數。 圖1所示的預設性能函數具有兩個性質:1)單調遞減的正函數;2)當時間趨于無窮時,函數趨于一個任意小的正數。定義如下所示的函數α(t):R+→R+ 圖1 預設性能示意圖Fig.1 Illustration of prescribed performance (14) 式中:α0、β、ω5>0為預設性能函數的需要設計的參數;ω5是足夠小的數;α∞>0為預設性能函數的終值,能夠保證狀態量Λ最終收斂于穩定域中。 ΓΛ={Λ∈R:|Λ|<α∞} (15) 顯然式(14)滿足預設性能函數的兩條性質,因此可以作為預設性能函數。 針對跟蹤誤差,利用式(14)定義的預設性能函數,可得不等式約束 -δLα(t)<Λ(t)<δUα(t) (16) 式中:0≤δL,δU≤1是為防止狀態量超調而定義的常量,由式(14)看出當ω1→0時α(0)→+∞。 -δLα(0)<Λ(0)<δUα(0) (17) 因此無論初始誤差正負都能保證式(17)成立。從而當預設性能函數具有式(14)的形式時,放寬了對初始誤差已知的限制。 定義廣義狀態誤差量為 (18) (19) 令δL=[δL1,δL2,δL3]T,δU=[δU1,δU2,δU3]T,由于預設性能函數α(t)=[α1(t),α2(t),α3(t)]T是正函數,式(19)也可寫成如下形式 (20) ψi()=ln((i+δLi)/(δUi-i))/2 (21) 令 (22) ψ=[ψ1,ψ2,ψ3]T存在逆映射η(?)=ψ-1(?(t)),其表達形式為 (23) 則轉化后狀態量的導數如下 λR-1(f-g(d+a))- (24) 式中:χ=diag(α1(t),α2(t),α3(t)),R=diag(r1,r2,r3),其分量ri(i=1,2,3)為ri(?i,t)=αi(t)/(?ηi(?i)/??i)。 針對平動點相對軌道方程式(4),設計預設性能控制器 u=-sgn(G)ζR-1Q?/(1-?TQ?) (25) 式中:ζ為可調正常量;Q=diag(Q1,Q2,Q3),其參數應滿足下述不等式 (26) 由于g=-I3×3,因此矩陣G=(gT+g)/2為負單位矩陣,因此控制器式(25)可以重新寫為 u=ζR-1Q?/(1-?TQ?) (27) 下面證明系統的穩定性。 在非空區域[0,tm]內選取如下李雅普諾夫函數 V?=(1/4)(?TQ?)2 (28) 對式(28)的兩邊求關于時間的導數,得 (29) 將式(24)代入到式(29),得到 (d+a)TgT+uTgT)λR-1Q? (30) 而由范數的性質、預設性能函數的定義、平動點相對運動方程以及約束條件可知存在正常數κ1、κ2、κ3、κ4、κ5使得以下不等式成立 (31) 則 (κ1+κ2+κ3+κ4)κ5:κ (32) 將式(25)代入式(30),并結合不等式(32)和g為負單位陣可得 (1-?TQ?))=(?TQ?)(κ-ζλQ(R-1)2 ?TQ?/(1-?TQ?))=φ(κ-ζλQ(R-1)2 φ(κ+ρm)((κ/(κ+ρm)-φ)/(1-φ)) (33) 考慮到0<φ/(φ+ρm)<1,因此可以得到 (34) 因此φ(t)在[0,tm]內始終滿足不等式0<φ(t)<φm=max(φ(0),κ/(κ+ρm))<1。 進一步可以得到 (35) 結合式(22)以及其單調遞增的逆映射ψi可知 即對任意的t∈[0,+∞),李雅普諾夫函數V?=(1/4)(?TQ?)2≤0成立。 以平動點軌道逼近段的交會任務為例對本文所提方法的有效性及魯棒性進行驗證。本文所有仿真利用Matlab R2014a軟件,計算機為Windows 7系統,配置Intel(R)Core (TM)2 Duo CPU E7500處理器,主頻2.93 GHz,內存2.00 GB,32位操作系統,求解器采用的是固定積分步長的4階Runge-Kutta方法。值得注意的是仿真過程中,所有的初始條件必須進行無量綱化(具體方法見1.1節)。仿真參數對應的是無量綱化后的動力學模型。 幅值較小的地-月Halo軌道在深空探測任務中是一個非常重要的中轉站[25],本文取振幅Az=10000 km的地-月L1Halo軌道為目標航天器所在軌道,其質量參數μ=0.01215。假設追蹤航天器和目標航天器的初始相對位置和速度狀態分別為[50;0;0] km和[-10;5;6] m/s,最終期望的兩航天器相對位置和速度狀態為[1;0;0] km及[0;0;0] m/s。外部擾動參數設計為a1=a2=10-7,a3=0,即外部擾動的幅值選取的是太陽引力和太陽光壓的最大值,ω1=ω2=π/900。兩航天器相對位置導航精度如表1所示[26]。失效推力器所提供的控制加速度的形式如式(36)所示。積分鏈微分器的設計參數為c1=1;c1=2;c1=3;m=2000;1=0.05;2=8000。控制器設計參數如表2所示。 表1 兩航天器相對導航誤差Table 1 Relative navigation error of two spacecraft (36) 表2 預設性能函數和控制器參數Table 2 Parameters of prescribed performance 由第2部分的穩定性證明可知,本文所提出的交會控制方法對不確定性和外部干擾具有魯棒性。下文通過5種工況進行數值仿真驗證,工況一(Case 1):假設擾動為零,也不存在導航和制導誤差,這是一種理想狀態,用來驗證本文所提方法的有效性;工況二(Case 2):只考慮擾動;工況三(Case 3):只考慮導航誤差;工況四(Case 4):制導不確定性;工況五(Case 5)同時考慮導航誤差、擾動以及制導不確定性。后4種工況用來驗證本文方法的魯棒性。 圖2和圖3分別為兩個航天器在三階積分鏈微分器-預設性能控制器下的相對位置和相對速度的變化曲線,從圖中可以看出,相對位置和相對速度可以分別收斂到期望交會狀態的5×10-3km和10-3m/s 鄰域內。即表明,可以實現追蹤航天器與目標航天器的近程交會任務。相對于理想狀態,當推力器存在故障時,系統狀態收斂速度比較慢,而擾動和相對導航誤差對其收斂速度幾乎沒有影響。不論哪種不確定性,交會狀態的末端誤差的量級都為10-3。 圖4和圖5是5種情況由TICD得到的相對位置和相對速度的估計值。從圖中可以看出,即使存在各種不確定性,觀測系統的狀態仍能以很快的速度高精度地收斂到實際系統的狀態,相對速度狀態估計值的精度達到10-3m/s,并且由圖4可知TICD具有抑制干擾和噪聲性能。(注:RV(Real Value)表示實際值;EV(Estimate Value)表示估計值) 圖2 相對位置狀態變化示意圖Fig.2 Relative position response 圖6是五種情況追蹤航天器所需的控制加速度,在收斂初始階段,控制加速度會出現一些波動,但波動峰值非常小,都小于3×10-3m/s2,隨著控制加速度收斂,對于理想情況(Case 1),控制加速度光滑趨于平穩,對于兩航天器相對運動中存在不確定性的情況,其加速度會出現輕微的震蕩,但是量級非常小,為10-6m/s2。 300次蒙特-卡洛打靶得到的交會位置和速度誤差如表3所示。可以看出,擾動誤差對末端相對位置誤差影響較大,對末端相對速度誤差影響較小,當存在相對導航誤差和推力器故障時,相比理想情況相對狀態誤差都顯著增加。 圖3 相對速度狀態變化示意圖Fig.3 Relative velocity response 圖4 兩航天器相對位置估計圖Fig.4 Relative distance estimations 圖5 兩航天器相對速度估計圖Fig.5 Relative velocity estimations 本文針對平動點軌道兩航天器交會過程中相對速度測量敏感器發生故障的問題進行了研究。基于三階積分鏈微分器設計了僅需相對位置狀態的預設性能控制器,并通過理論分析證明了平動點軌道兩航天器的相對位置狀態和相對速度狀態都能在預設性能函數的邊界內收斂。最后利用所設計的魯棒控制器對帶有擾動、相對導航誤差以及推力器存在故障的情況進行了仿真分析。仿真結果表明,利用TICD可以精確地估計相對速度狀態,所提控制方法能夠保證系統狀態滿足實際的預設性能。即使在交會過程中存在各種不確定性,仍然可以實現追蹤航天器與目標航天器的安全精確交會,從而驗證了本文所提方法具有很強的魯棒性和高精度的特性。 圖6 控制加速度變化圖Fig.6 Control accelerations2 基于TICD和LPPC的交會控制策略
2.1 三階積分鏈微分器
2.2 預設性能函數的設計
2.3 廣義狀態量及其轉化函數


2.4 控制器設計




3 數學仿真與結果分析
3.1 仿真初始條件與參數設置

3.2 仿真結果與分析
4 結 論
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56