電液伺服型并聯(lián)式加注機(jī)器人運(yùn)動軌跡跟蹤控制
2019-06-05 02:54:30于存貴姚建勇
宇航學(xué)報 2019年5期
關(guān)鍵詞:設(shè)計
趙 純,于存貴,何 慶,徐 強(qiáng),姚建勇
(1.南京理工大學(xué)機(jī)械工程學(xué)院,南京 210094;2.上海宇航系統(tǒng)工程研究所,上海 201109)
0 引 言
運(yùn)載火箭燃料加注的自動化是實現(xiàn)火箭安全發(fā)射的重要保障,高性能自動加注機(jī)器人技術(shù)在國內(nèi)外都得到了廣泛的關(guān)注。目前,比較有代表性的是俄羅斯的“架棲”技術(shù)和美國的“箭棲”技術(shù)[1]。“架棲”技術(shù)能實現(xiàn)連接器的自動對接和脫落,但是其加注活門僅能安裝在箭體尾部,環(huán)境適應(yīng)性較差。“箭棲”技術(shù)通過人工方式實現(xiàn)加注裝置的對接,并通過火箭的升力實現(xiàn)強(qiáng)行脫落。該種方式結(jié)構(gòu)簡單,但是其缺少主動對接功能。目前國內(nèi)也取得了一些進(jìn)展,最新成果是由黃小妮等[2]提出的一種以電驅(qū)SCARA機(jī)械臂為依托的“箭架兩棲”加注技術(shù),其能實現(xiàn)加注連接器的自動對接脫落。然而由于電驅(qū)機(jī)械臂的固有特性,其無論是承載力還是響應(yīng)速度均未達(dá)到理想狀態(tài)。考慮到電液伺服型并聯(lián)式加注機(jī)器人具有剛度大、精度高、自重載荷比小和響應(yīng)速度快等優(yōu)點,其已成為新一代自動加注技術(shù)的理想選項[3]。
然而,由于并聯(lián)機(jī)器人本質(zhì)上是一個時變、多變量和強(qiáng)耦合的非線性系統(tǒng),其高性能控制器設(shè)計仍是一個難點。目前關(guān)于多關(guān)節(jié)機(jī)器人的控制方法主要可分為兩類:集中控制策略和分散控制策略。集中控制策略是指一類基于系統(tǒng)動力學(xué)模型進(jìn)行算法設(shè)計的控制方法。文獻(xiàn)[4]針對氣動并聯(lián)平臺提出了一種自適應(yīng)魯棒控制器,其通過自適應(yīng)方法實現(xiàn)了對動力學(xué)模型中緩變不確定的在線估計。文獻(xiàn)[5-7]針對空間機(jī)器人/機(jī)械臂,提出了一類神經(jīng)網(wǎng)絡(luò)控制方法。其通過神經(jīng)網(wǎng)絡(luò)在線估計和補(bǔ)償系統(tǒng)動力學(xué)模型中的不確定,并通過魯棒控制器抑制動力學(xué)擾動觀測誤差。然而,雖然集中控制策略在仿真或?qū)嶒炇噎h(huán)境下取得了良好的軌跡跟蹤性能,但是其對于系統(tǒng)精確模型的依賴性,以及復(fù)雜的模型解算,使得該類方法在實際場合中的應(yīng)用開展并不明朗。
為了簡化控制器設(shè)計,分散控制策略將多關(guān)節(jié)機(jī)器人分解為一組受外部干擾的多軸系統(tǒng),進(jìn)而將控制器設(shè)計任務(wù)簡化為針對各關(guān)節(jié)設(shè)計高性能控制器。該方法的關(guān)鍵在于如何有效處理關(guān)節(jié)間的強(qiáng)耦合動力學(xué)干擾。文獻(xiàn)[8-9]分別使用神經(jīng)網(wǎng)絡(luò)和模糊邏輯控制器來逼近關(guān)節(jié)中的強(qiáng)外部擾動,但是其復(fù)雜的在線計算未從本質(zhì)上簡化控制器設(shè)計。為了高效地處理各關(guān)節(jié)所受耦合外部干擾,干擾觀測器(Disturbance observer,DOB)和擴(kuò)張狀態(tài)觀測器(Extended state observer,ESO)在分散控制中得到了廣泛應(yīng)用。文獻(xiàn)[10]提出了一種基于DOB的自適應(yīng)魯棒分散控制策略,并將其應(yīng)用到一種二自由度平面并聯(lián)機(jī)器人的研究中,但是其未考慮驅(qū)動器的動態(tài)特性。文獻(xiàn)[11]針對液壓驅(qū)動Stewart平臺提出了一種分散級聯(lián)控制方案,其通過設(shè)計DOB實現(xiàn)了對關(guān)節(jié)中外干擾的在線估計,但是其假定外干擾的變化率近似于零,這在實際應(yīng)用場合中具有較大的局限性。文獻(xiàn)[12]針對一種Stewart平臺,提出了一種基于關(guān)節(jié)PD控制器和ESO干擾觀測器的并聯(lián)機(jī)器人分散控制策略,但是其并未對系統(tǒng)的穩(wěn)定性進(jìn)行理論證明。杜艷麗等[13]將ESO與動態(tài)面反演技術(shù)結(jié)合,研究了一種可重構(gòu)模塊機(jī)器人的反演分散控制,其克服了反演控制中控制器微分膨脹的問題。其它類似的多關(guān)節(jié)機(jī)器人分散控制策略可參考文獻(xiàn)[14-15]。
在實際加注任務(wù)中,執(zhí)行機(jī)構(gòu)需同時承載柔順對接機(jī)構(gòu)、加注管路和液體燃料的質(zhì)量,故而難以獲得其精確的數(shù)學(xué)模型;另外,對接誤差也將使得箭體對加注機(jī)器人施加一個外部干擾力。因此,考慮到控制器的工程可實現(xiàn)性,無需系統(tǒng)完整動力學(xué)模型的執(zhí)行機(jī)構(gòu)分散控制策略顯然更適合于實際的加注任務(wù)。
但是,現(xiàn)有分散控制策略中,無論DOB型或ESO型觀測器都只能實現(xiàn)對關(guān)節(jié)擾動誤差的有界估計,同時控制器均只實現(xiàn)了對關(guān)節(jié)中匹配不確定的有效估計和補(bǔ)償,而對引入驅(qū)動器后產(chǎn)生的關(guān)節(jié)不匹配不確定性問題,現(xiàn)有成果均未加以考慮。為了解決擾動觀測器的快速收斂問題,文獻(xiàn)[16]提出了一種有限時間收斂干擾觀測器(FTDO)。目前FTDO技術(shù)已經(jīng)得到了較為廣泛的研究和應(yīng)用。文獻(xiàn)[17]基于FTDO研究了一類二階系統(tǒng)的有限時間跟蹤控制問題。文獻(xiàn)[18]通過融合自適應(yīng)魯棒控制和FTDO觀測器研究了單軸液壓驅(qū)動器的軌跡跟蹤控制問題,但是其對驅(qū)動器的匹配不確定只通過自適應(yīng)的方法加以估計,該種方法對于匹配不確定中可能存在快速時變干擾并不適用。文獻(xiàn)[19]結(jié)合滑模控制方法和FTDO技術(shù)針對一類機(jī)器人的有限時間控制方法進(jìn)行了研究,但是該控制器基于機(jī)器人動力學(xué)模型展開,且未考慮驅(qū)動器的動態(tài)特性。
基于以上分析,本文針對并聯(lián)式加注機(jī)器人的空間軌跡跟蹤控制問題,基于分散控制的思想,通過融合有限時間干擾觀測器(FTDO)和魯棒控制方法,提出了一種系統(tǒng)全局有限時間收斂的加注機(jī)器人動力學(xué)解耦反步魯棒控制策略。首先通過結(jié)合位置反解模型和軌跡生成技術(shù),實現(xiàn)了系統(tǒng)基于工作空間和關(guān)節(jié)空間的期望軌跡映射;其次,將執(zhí)行機(jī)構(gòu)進(jìn)行關(guān)節(jié)分散化處理,并通過在各關(guān)節(jié)中引入兩個FTDO,實現(xiàn)了對關(guān)節(jié)中匹配與不匹配不確定的有限時間估計和補(bǔ)償;同時,基于系統(tǒng)的動力學(xué)解耦模型,通過設(shè)計反步魯棒控制器從理論上保證了系統(tǒng)的穩(wěn)定性,并通過Lyapunov方法證明了系統(tǒng)跟蹤誤差的有限時間收斂。最后通過試驗驗證了本文控制器的有效性。
1 系統(tǒng)建模與問題描述
1.1 系統(tǒng)總體布局
對于受風(fēng)載作用的火箭箭體,其運(yùn)動主要體現(xiàn)在三個平動自由度,而在三個轉(zhuǎn)動自由度上的運(yùn)動量較小(不大于±0.5°)[1]。針對此特點,自動加注機(jī)器人可采用三平動并聯(lián)執(zhí)行機(jī)構(gòu)串聯(lián)六自由度柔順對接機(jī)構(gòu)的混聯(lián)結(jié)構(gòu)方案,其總體結(jié)構(gòu)如圖1所示。兩者的具體功能可以劃分為:
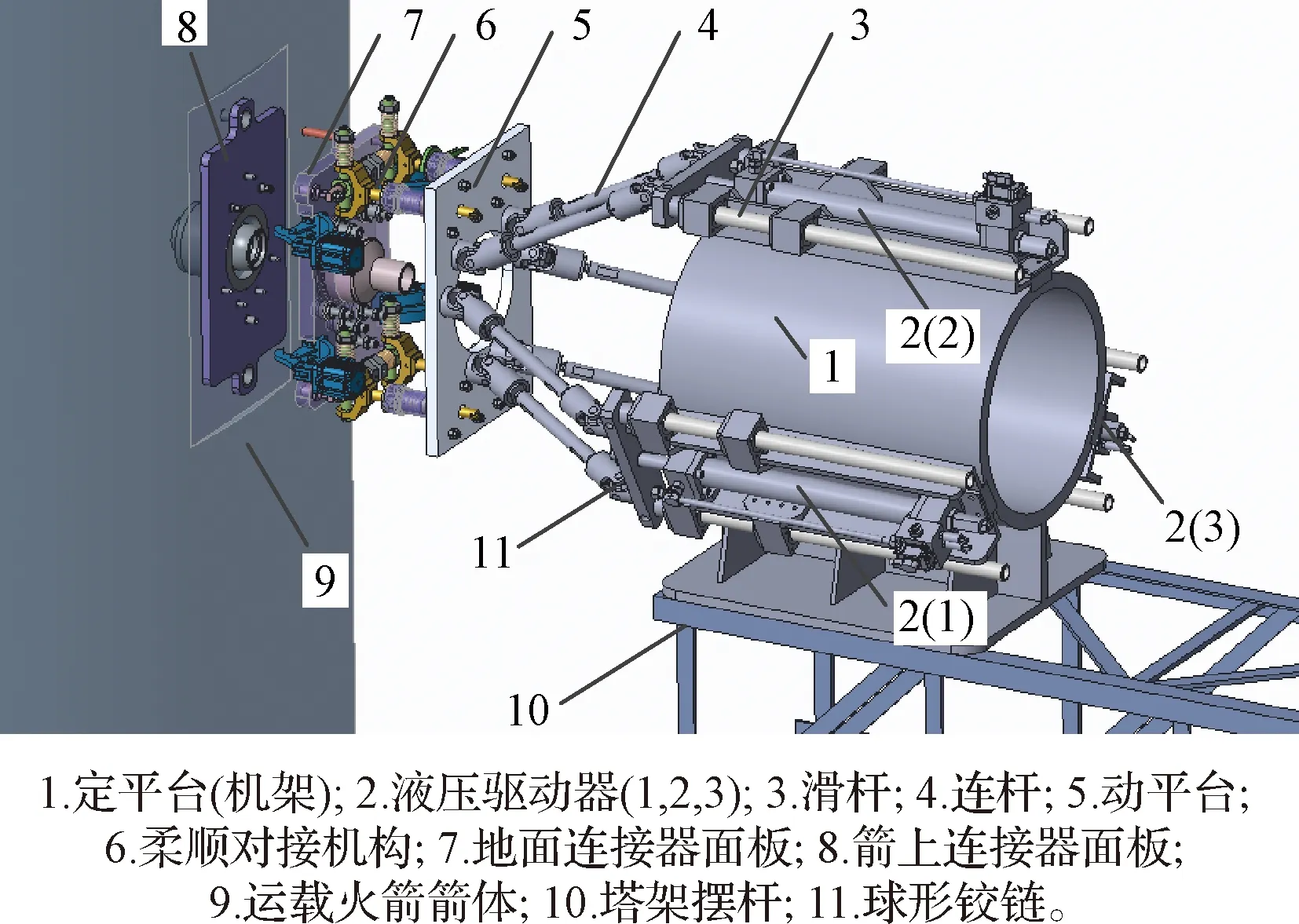
圖1 運(yùn)載火箭并聯(lián)式加注機(jī)器人整體示意圖Fig.1 Schematic diagram of hydraulic parallel filling robot for launch vehicle
1)執(zhí)行機(jī)構(gòu)采用電液伺服型3-PSS并聯(lián)機(jī)器人,其功能是實現(xiàn)柔順對接機(jī)構(gòu)與箭體在空間三個平動自由度上的對接、隨動和脫落。關(guān)于3-PSS機(jī)構(gòu)的具體結(jié)構(gòu)原理可參考文獻(xiàn)[20]。
2)柔順對接機(jī)構(gòu)采用彈簧支鏈4-CCC型的結(jié)構(gòu)方案,其主要功能是起到執(zhí)行機(jī)構(gòu)動平臺與地面連接器面板在空間六自由度上的柔順連接作用。關(guān)于柔順對接機(jī)構(gòu)的具體結(jié)構(gòu)原理可以參考文獻(xiàn)[1]。
1.2 3-PSS機(jī)構(gòu)位置反解建模
參考文獻(xiàn)[20],可建立如圖2所示的執(zhí)行機(jī)構(gòu)簡化模型。定義r=[x,y,z]T為動平臺中心點O′在Oxyz中的位置矢量,則執(zhí)行機(jī)構(gòu)的位置反解模型為
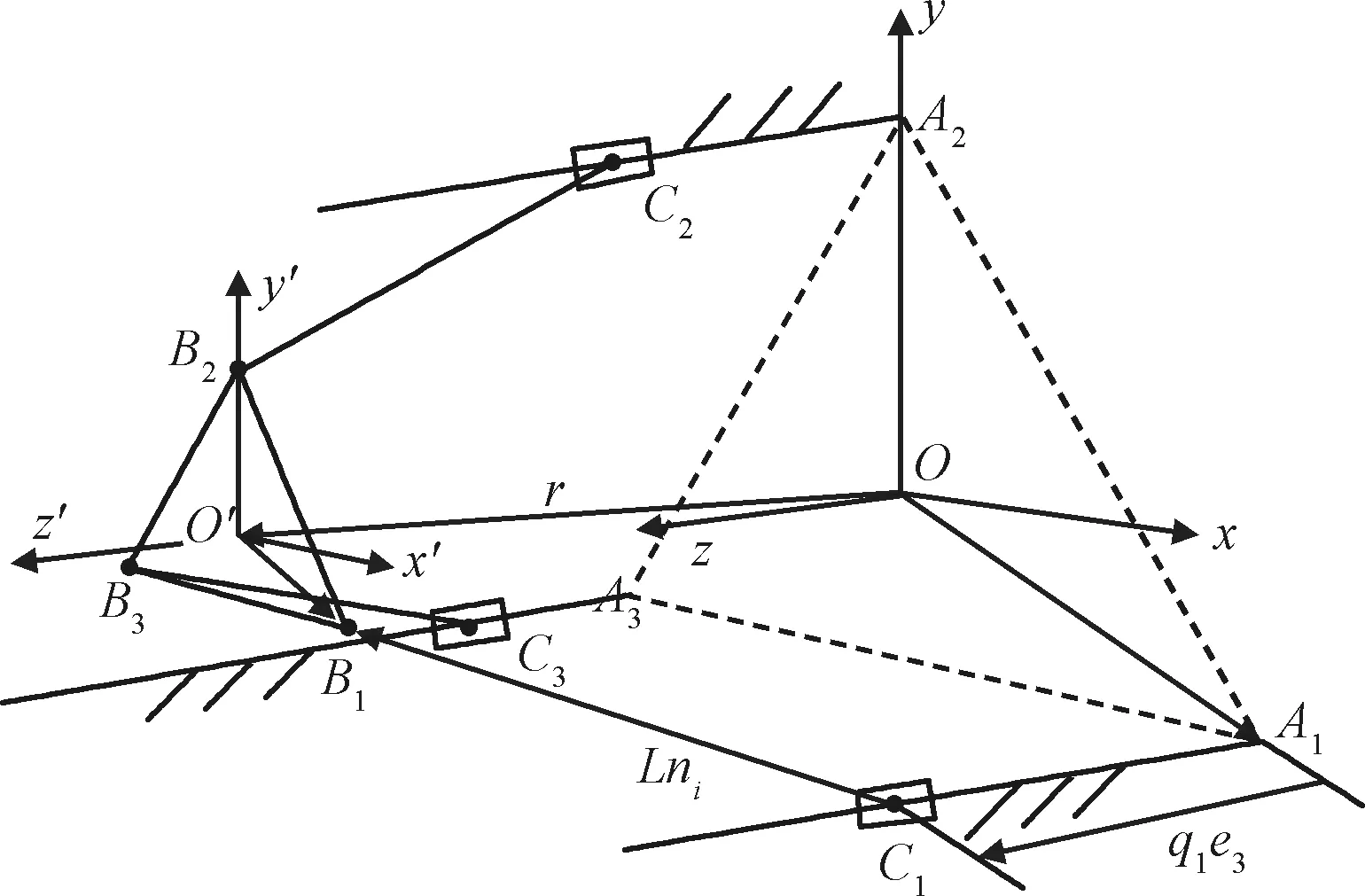
圖2 3-PSS機(jī)構(gòu)簡化示意圖Fig.2 Schematic diagram of 3-PSS mechanism
(1)
式中:e3=[0,0,1]T,lAi和lBi分別是Ai和Bi在坐標(biāo)系Oxyz和O′x′y′z′中的位置矢量,qi為液壓桿的伸縮量,L為連桿桿長。
1.3 并聯(lián)機(jī)構(gòu)動力學(xué)模型及其關(guān)節(jié)分散化
對于3-PSS并聯(lián)機(jī)構(gòu),其基于關(guān)節(jié)空間的動力學(xué)方程可以描述為下述形式

(2)
式中:τ為液壓缸的驅(qū)動力向量;q為三液壓缸的位移矢量;M,C,G分別為慣性矩陣,離心和哥氏力矩陣和重力項;D=DS+DN為系統(tǒng)的建模誤差項(DS為外部干擾力,DN為執(zhí)行機(jī)構(gòu)其它建模誤差項)。
針對動力學(xué)模型(2),其有如下性質(zhì)[10]:
性質(zhì)1.矩陣M為對稱正定矩陣,同時存在常數(shù)μmax>μmin>0,cH>0,cG>0,使得下面各式成立
(3)
式中:I為三階單位矩陣。
假設(shè)受風(fēng)載作用的箭體在笛卡爾空間的運(yùn)動為rd=[xd,yd,zd,ψxd,ψyd,ψzd]T。考慮到箭體的擺動是有界且連續(xù)的,因此有如下性質(zhì):
定義r=φ1(q)=[x,y,z]T和Δr=rd-r分別為執(zhí)行機(jī)構(gòu)在工作空間的軌跡輸出和軌跡跟蹤誤差。因此,執(zhí)行機(jī)構(gòu)動平臺所受外部干擾力可以定義為
F=K(rd,q)Δr
(4)
式中:K(rd,q)∈R3×6為柔順機(jī)構(gòu)的等效剛度系數(shù)。
由此可得關(guān)節(jié)空間的等效外部干擾力為[7]
DS(t)=(J(q))-1KΔr=φ2(K,rd,q)
(5)
式中:J(q)為并聯(lián)機(jī)器人的雅克比矩陣。
將式(2)分解為一組受外部擾動關(guān)節(jié)子系統(tǒng)的集合,可得各關(guān)節(jié)輸出力的動力學(xué)平衡方程為
(6)

1.4 液壓驅(qū)動器建模
關(guān)節(jié)液壓驅(qū)動器的結(jié)構(gòu)如圖3所示。
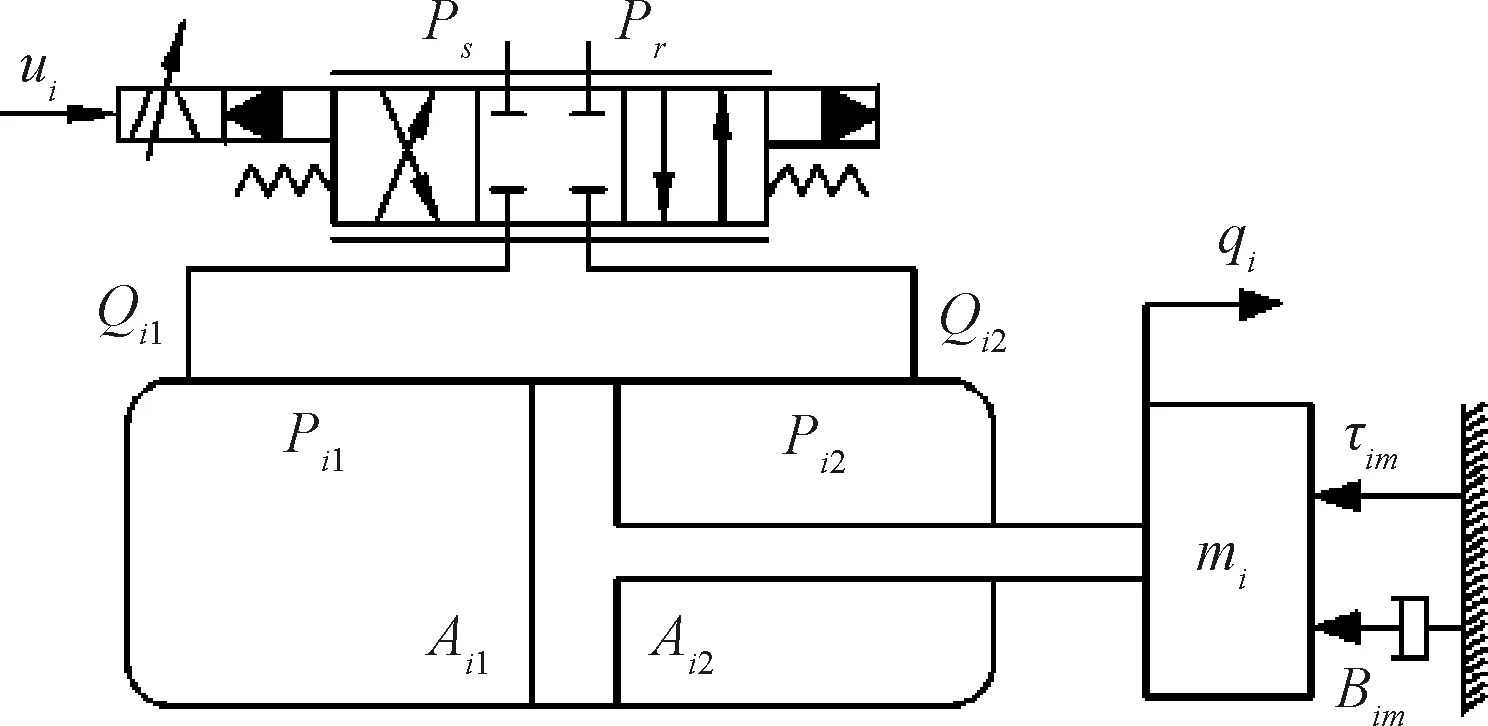
圖3 液壓驅(qū)動器示意圖Fig.3 Schematic diagram of hydraulic actuator
液壓驅(qū)動器的動態(tài)平衡方程可以描述為[21]
(7)
式中:Pi1和Pi2是液壓缸兩腔壓力,Ai1和Ai2為兩腔的有效作用面積,Bim為液壓缸的理想摩擦系數(shù),dim為驅(qū)動器中除了外干擾之外的其它未建模干擾。
忽略液壓缸的外泄漏,則液壓缸兩腔的壓力動態(tài)可以建模為[21]
(8)
式中:Vi1=Vi01+Ai1qi,Vi2=Vi02-Ai2qi分別表示液壓缸兩腔的有效容積,其中Vi01和Vi02分別為兩腔的初始容積;βe為油液彈性模量;Cit為內(nèi)泄漏系數(shù);Qi1和Qi2分別為液壓缸的兩腔流量;PiL=Pi1-Pi2為液壓缸兩腔壓差;pid1和pid2分別為液壓缸兩腔的壓力動態(tài)建模誤差。其中Qi1和Qi2可分別定義為[21]
(9)
式中:ku為伺服閥總的流量增益,Ps為油源壓力,Pr為回油壓力,函數(shù)s(v)有如下定義
(10)

(11)
式中:
本文控制器的設(shè)計目標(biāo)為:對于給定的工作空間期望軌跡rd,通過式(1)可得到系統(tǒng)關(guān)節(jié)空間的期望軌跡qd,進(jìn)而設(shè)計有界的控制輸入u,使得關(guān)節(jié)軌跡輸出q盡可能地跟蹤qd。
為便于后續(xù)控制器設(shè)計,首先有如下假設(shè):
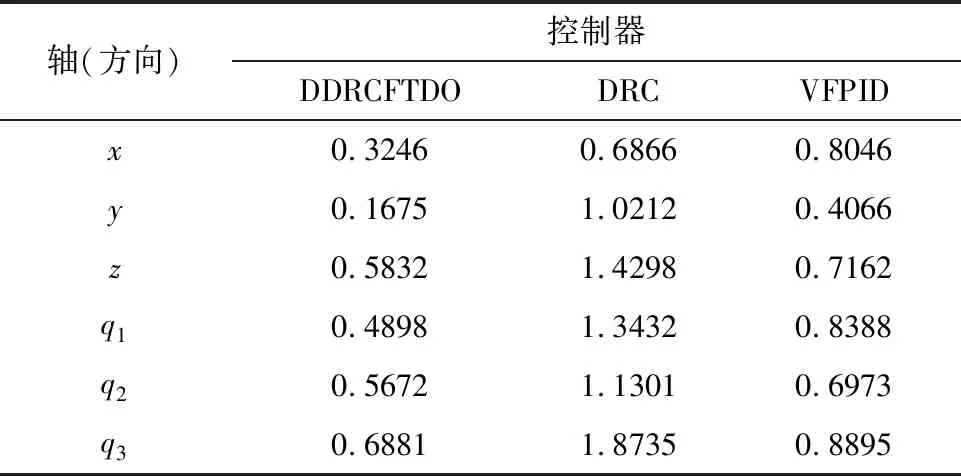
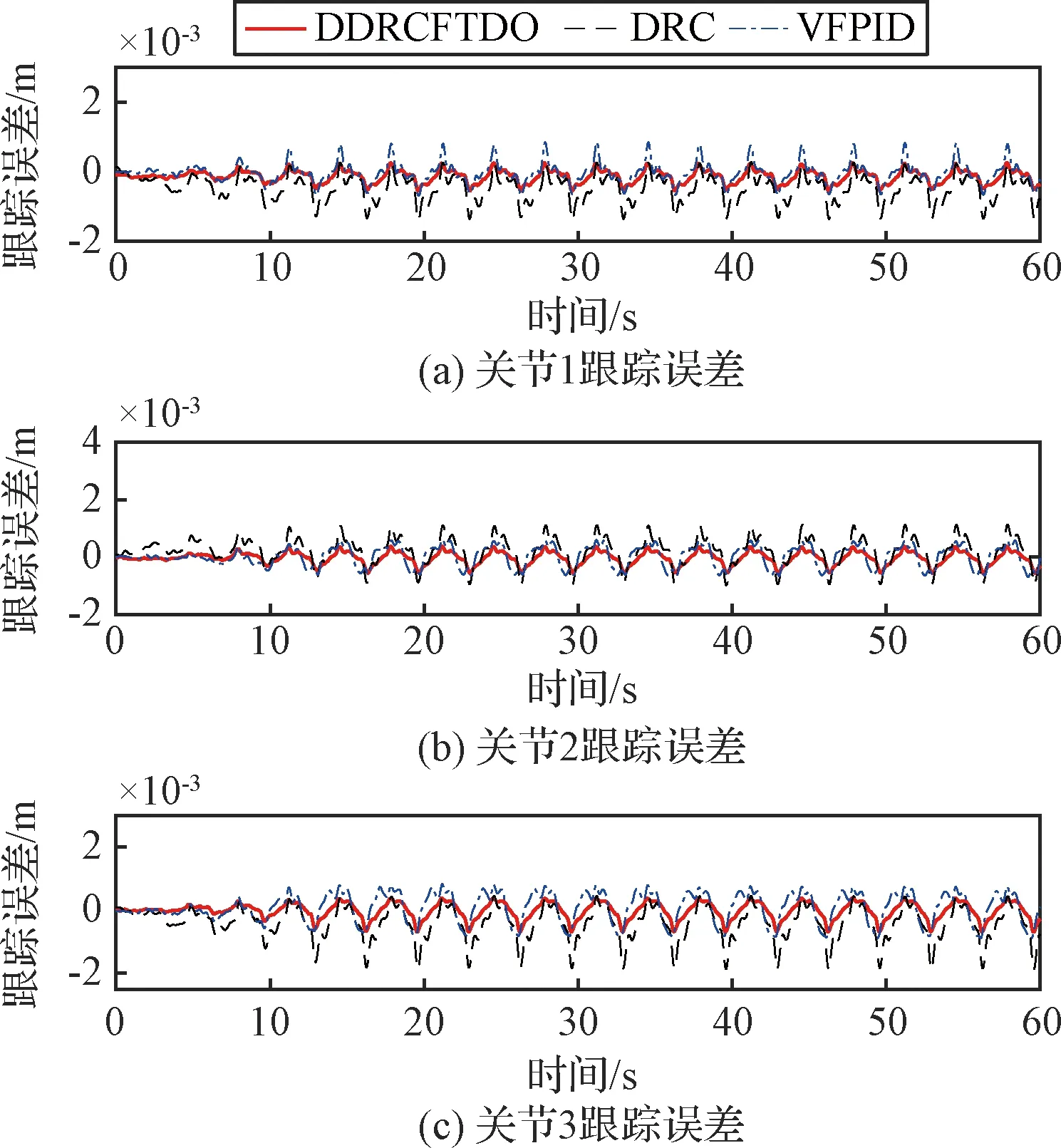
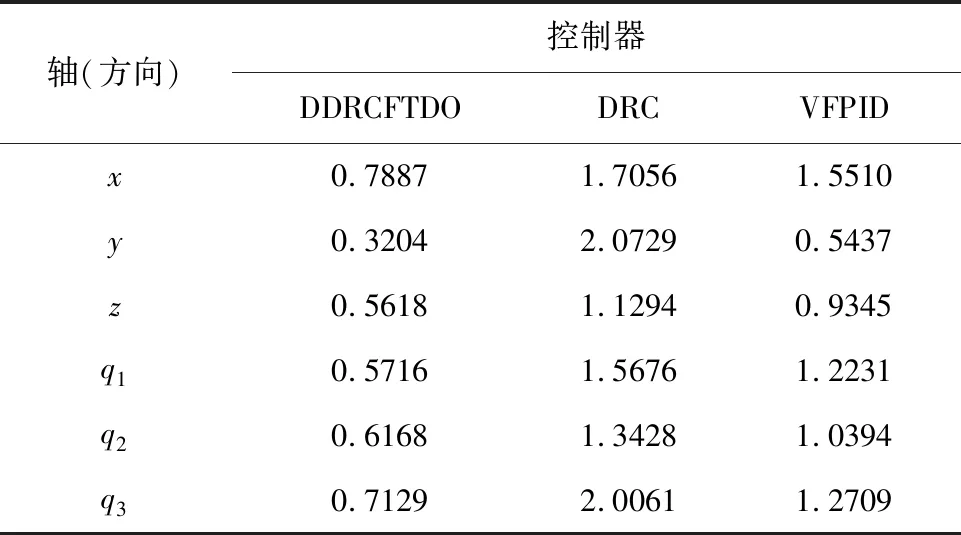
假設(shè)1.液壓系統(tǒng)在一般工況下工作,即各液壓缸的兩腔油壓滿足0 假設(shè)2.關(guān)節(jié)中的不匹配不確定性DiN(·)和dim(·)有界,且其二階可導(dǎo)且有界。同時,關(guān)節(jié)的匹配不確定di3(t)有界,且其一階導(dǎo)數(shù)存在且有界。 結(jié)合式(5)、式(6)和假設(shè)2可知,存在有界常數(shù)L2ip和L3iq使得下式成立 (12) 式中:p∈N0:2,q∈N0:1。 (13) 式中:κ1,κ2,κ3為濾波器設(shè)計常數(shù)。 基于性質(zhì)1可知,存在非負(fù)常數(shù)β1,β2和β3,使得下述不等式成立 (14) 因此,基于式(5)、式(6)、式(14)和假設(shè)2,可知存在非負(fù)常數(shù)λi1,λi2和λi3,使得下式成立 (15) 參考文獻(xiàn)[16],可針對關(guān)節(jié)不匹配不確定di2(t)設(shè)計如下形式的有限時間干擾觀測器 (16) (17) (18) (19) 至此,基于式(16),可得執(zhí)行機(jī)構(gòu)基于關(guān)節(jié)空間的動力學(xué)解耦模型為 (20) 步驟1:基于式(20),定義如下的誤差變量 (21) 由式(20)和(21)可得 (22) 為x3設(shè)計一個虛擬控制函數(shù)α2,其形式如下 (23) 式中:α2a是系統(tǒng)的名義模型補(bǔ)償項,α2s為魯棒控制項,k2s1為正定對角矩陣。 定義z3=x3-α2,同時將式(23)代入式(22),可得 (24) 設(shè)計α2s2滿足如下的鎮(zhèn)定條件: (25) 式中:ε2>0為可任意小的設(shè)計參數(shù)。 (26) 步驟2:對z3兩端進(jìn)行求導(dǎo),可得 (27) (28) 針對di3(t)可設(shè)計如下形式的擾動觀測器 (29) (30) (31) (32) 結(jié)合式(27)和(29),控制律u可以設(shè)計為: (33) (34) 設(shè)計us2滿足如下的鎮(zhèn)定條件 (35) 式中:ε3>0為可任意小的設(shè)計參數(shù)。 (36) 定理1.選擇合適的控制反饋增益矩陣k1,k2s1和k3s1,使得如下矩陣Λ為正定陣 (37) 式中:Λ2=diag(-1/2,-1/2,-1/2)。同時,選用控制器(33),則可以得到如下結(jié)論: (1)閉環(huán)系統(tǒng)中所有信號均有界,且如下定義的Lyapunov函數(shù) (38) 滿足下述不等式 V≤e-μtV(0)+(η/μ)(1-e-μt) (39) 式中:η=ε2+ε3,μ=2λmin(Λ)min{1,1/λmax(M)},λmin(·)和λmax(·)分別表示矩陣的最小和最大特征值。 證.首先證明結(jié)論(1)。對式(38)兩端進(jìn)行微分,并考慮到式(21)、式(22)和式(27),整理可得 (40) 注意到式(25)和式(35),因此有 (41) 根據(jù)對比原理[22]可得 V≤e-μtV(0)+(η/μ)(1-e-μt) (42) (43) 圖4 并聯(lián)式加注機(jī)器人驗證平臺Fig.4 Experimental platform of parallel filling robot 另外,液壓驅(qū)動器采用行程為400 mm的單出桿液壓缸(活塞桿直徑28 mm,液壓缸內(nèi)徑40 mm)。同時,各驅(qū)動器包含一個型號為Atos DLHZO-TEB-SN-NP-040-L71的比例伺服閥,其額定流量為40 L/min;一個型號為MTS R系列高精度磁致伸縮位移傳感器,其精度為±25 μm;兩個型號為MEAS M5200-C00002-250 BG的壓力傳感器,其精度為0.1 MPa。 實時控制系統(tǒng)采用基于Matlab/xPC技術(shù)的方案,關(guān)于該技術(shù)的具體工作原理可參考文獻(xiàn)[11]。反饋信號的AD采集和控制信號的DA輸出均采用同一塊NI PCI-6229板卡。控制系統(tǒng)的采樣時間為1 ms。 為了更好地驗證本文所設(shè)計控制器的有效性,選取以下3種控制策略進(jìn)行試驗對比分析: 2)關(guān)節(jié)直接魯棒控制器(Direct robust controller,DRC)。DRC控制器中不包含關(guān)節(jié)擾動補(bǔ)償項,但其它控制器參數(shù)與DDRCFTDO相同,即k1=[850,850,850],k2=[530,530,530],k3=[320,320,320]。 3)速度前饋PID控制器(Velocity feed-forward PID,VFPID)。控制器參數(shù)設(shè)計為:kip=1400,kii=350,kid=0,速度前饋增益為kiv=12 Vs/m。 3.2.1工況一 首先校核執(zhí)行機(jī)構(gòu)對于箭體搖擺運(yùn)動的隨動跟蹤性能。考慮到在液體燃料加注過程中,箭體因燃料重力作用造成的豎直下沉運(yùn)動極其緩慢(不大于15 mm/h),假設(shè)箭體受側(cè)風(fēng)作用,其運(yùn)動規(guī)律如下 (44) 不同控制器在工作空間和關(guān)節(jié)空間的軌跡跟蹤誤差情況分別如圖5~6所示。在最后兩個運(yùn)動跟蹤周期中,不同控制器在各軸(方向)上的最大跟蹤誤差如表1所示。 表1 各軸(方向)最大跟蹤誤差Table 1 Maximum tracking error of each axis (direction) 由試驗結(jié)果可知,DDRCFTDO控制器無論在關(guān)節(jié)空間還是工作空間均取得了最優(yōu)的軌跡跟蹤控制精度。這是由于在DDRCFTDO控制器中,F(xiàn)TDO的引入使得控制器實現(xiàn)了對關(guān)節(jié)中匹配和不匹配不確定的精確估計和補(bǔ)償,進(jìn)而有效地減小了關(guān)節(jié)擾動(特別是外部擾動)對關(guān)節(jié)控制性能的影響。另外,相對DDRCFTDO,DRC控制器在關(guān)節(jié)空間各軸上的跟蹤精度均較差。分析其原因,主要是因為在隨動過程中,DRC控制器缺少對關(guān)節(jié)強(qiáng)外部擾動的有效補(bǔ)償處理,同時控制器的反饋增益較小,故而影響到了各關(guān)節(jié)的隨動精度。另外,結(jié)合圖6和表1中的指標(biāo)數(shù)據(jù)可知,在關(guān)節(jié)空間內(nèi),VFPID控制器的性能指標(biāo)均優(yōu)于DRC控制器,這是由于VFPID控制器通過速度前饋獲得了部分系統(tǒng)動力學(xué)補(bǔ)償,同時高增益反饋有效地抑制了關(guān)節(jié)跟蹤誤差。值得注意的是,在x軸向,DRC指標(biāo)好于VFPID,這也充分說明了并聯(lián)機(jī)器人關(guān)節(jié)空間和工作空間軌跡映射的強(qiáng)非線性。 為了驗證FTDO的觀測精度,本文將FTDO的擾動觀測值與關(guān)節(jié)擾動名義值進(jìn)行對比分析(名義值可通過ADAMS對給定運(yùn)動仿真分析獲得),對比結(jié)果如圖7所示。很明顯,F(xiàn)TDO擾動觀測結(jié)果與關(guān)節(jié)名義擾動走向大體一致,但是兩者之間也存在一定的偏差。這是由于關(guān)節(jié)不匹配不確定中不僅含有外部時變干擾,同時還存在一定的系統(tǒng)建模誤差(如摩擦建模誤差和其它未建模動態(tài)等)。因此,可以認(rèn)為FTDO在實際工況中,對關(guān)節(jié)中的不匹配不確定具有良好的觀測性能。同時,圖8顯示了FTDO對于關(guān)節(jié)匹配不確定的觀測情況,可見其處于合理范圍之內(nèi)。 圖5 工作空間軌跡跟蹤誤差Fig.5 Trajectory tracking errors in work space 圖6 關(guān)節(jié)空間軌跡跟蹤誤差Fig.6 Trajectory tracking errors in joint space 圖10 關(guān)節(jié)空間軌跡跟蹤誤差Fig.10 Trajectory tracking errors in joint space 3.2.2工況二 為了更一般地驗證控制器的性能,給定如下空間三維期望軌跡進(jìn)行控制器跟蹤性能校核 (45) 同時考慮到在實際任務(wù)中,液體燃料流量的變化將造成執(zhí)行機(jī)構(gòu)負(fù)載的改變,為了驗證系統(tǒng)在不同載荷下的性能,對系統(tǒng)進(jìn)行負(fù)載配重20 kg。 不同控制器在工作空間和關(guān)節(jié)空間的軌跡跟蹤誤差情況分別如圖9~10所示。在最后兩個運(yùn)動跟蹤周期中,不同控制器在各軸(方向)上的最大跟蹤誤差如表2所示。 由圖9~10和表2可知,DDRCFTDO控制器在關(guān)節(jié)空間和工作空間仍然取得最好的軌跡跟蹤性能。由于FTDO良好的觀測性能,期望軌跡和負(fù)載變化對關(guān)節(jié)的跟蹤控制性能影響并不明顯。而DRC和VFPID由于缺少有效的關(guān)節(jié)擾動補(bǔ)償,其關(guān)節(jié)跟蹤精度均有一定程度的惡化,這也進(jìn)一步體現(xiàn)了本文所設(shè)計控制器的有效性。 表2 各軸(方向)最大跟蹤誤差Table 2 Maximum tracking error of each axis (direction) 本文針對某電液伺服型并聯(lián)式加注機(jī)器人的空間軌跡跟蹤控制問題,提出了一種基于關(guān)節(jié)有限時間擾動觀測器的執(zhí)行機(jī)構(gòu)動力學(xué)解耦反步魯棒控制策略。試驗研究表明,本文所設(shè)計控制器具有良好的軌跡跟蹤精度和較強(qiáng)的關(guān)節(jié)抗干擾能力。控制器在不同工況下,均能夠保證執(zhí)行機(jī)構(gòu)空間軌跡跟蹤精度不大于1 mm,其遠(yuǎn)小于柔順機(jī)構(gòu)的空間可補(bǔ)償范圍。因此,本文所設(shè)計控制器能夠滿足在實際加注任務(wù)中對加注機(jī)器人軌跡跟蹤性能的要求。 另外,該控制器無需系統(tǒng)完整的動力學(xué)模型信息,結(jié)構(gòu)簡單可靠,在其它機(jī)器人相關(guān)的控制研究中同樣具有良好的工程應(yīng)用前景。2 控制器設(shè)計
2.1 關(guān)節(jié)期望軌跡生成
2.2 關(guān)節(jié)空間有限時間動力學(xué)解耦

2.3 關(guān)節(jié)空間反步魯棒控制器設(shè)計









2.4 主要結(jié)果




3 試驗分析
3.1 試驗建立


3.2 試驗對比



4 結(jié) 論
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04