軟件無線電的GNSS干擾盲識別系統(tǒng)
2019-06-06 08:30:56楊燕梅郎榮玲葉萬洋
導航定位學報 2019年2期
楊燕梅,郎榮玲,葉萬洋
(北京航空航天大學 電子信息工程學院,北京 100191)
0 引言
由于全球衛(wèi)星導航系統(tǒng)(global navigation satellite system, GNSS)處于復雜的無線環(huán)境中,經(jīng)常受到各種不同干擾信號的影響,這些干擾信號直接影響導航接收機的性能,甚至使其不能工作。因此在接收機中一般需要對接收的信號進行抗干擾,但是由于不同的干擾信號對導航信號的影響不同,所采用的抗干擾算法不同。比如在利用功率反演算法抗脈沖干擾時,由于協(xié)方差矩陣存在不穩(wěn)定性,會導致抗干擾算法失效。但是在抗窄帶干擾以及單頻干擾時,功率反演算法卻有很好的效果。而如果在抗干擾算法之前對干擾進行監(jiān)測,估計出干擾信號的類型和參數(shù),例如脈沖干擾的周期和占空比,則可以很好地利用功率反演算法進行抗干擾。因此為了保證衛(wèi)星導航系統(tǒng)的穩(wěn)定工作,對干擾信號調(diào)制類型進行識別及參數(shù)估計具有重要的意義。
根據(jù)經(jīng)驗和文獻資料調(diào)查發(fā)現(xiàn),針對GNSS的干擾的類型包括數(shù)字、模擬、掃頻和脈沖干擾等多種形式,因此GNSS干擾識別是一種缺乏先驗知識的數(shù)字調(diào)制方式、模擬調(diào)制方式及脈沖信號的混合識別。因此研究復雜環(huán)境下GNSS干擾盲識別技術是具有重要意義的。
目前無線通信信號的調(diào)制體制識別主要分為2大類:基于最大似然假設檢驗方法和基于特征提取的模式識別方法。
基于最大似然假設檢驗的方法的優(yōu)點在于,它理論上可以保證在貝葉斯最小誤判代價準則下得到最好的分類結(jié)果,但其局限性也很明顯,即需要有更多的先驗知識。在沒有先驗知識的條件下,它的復雜性和計算量較大,無法保證系統(tǒng)實時分類,工程應用性較差。
基于特征提取的模式識別方法主要包括2個步驟:特征提取和分類器的設計。特征提取的方法主要分為3大類:
1)基于時間域的特征提取。文獻[1]首次提出利用希爾伯特變換得到信號瞬時幅度、瞬時相位和瞬時頻率,利用瞬時幅度、瞬時相位和瞬時頻率的2階矩以及 2階中心距來對信號進行特征提取,實現(xiàn)了模擬幅度調(diào)制,單邊帶、雙邊帶幅度調(diào)制以及調(diào)頻信號的分類;文獻[2]實現(xiàn)了數(shù)字調(diào)制信號MASK、MPSK、MFSK的分類;文獻[3]同樣利用希爾伯特變換得到的信號的瞬時幅度、頻率和相位等信息,以人工神經(jīng)網(wǎng)絡作為分類器,實現(xiàn)數(shù)字調(diào)制信號(ASK/2FSK/4FSK/BPSK/ QPSK)和模擬調(diào)頻和調(diào)幅信號的識別。這種基于時間域的特征提取的方法實現(xiàn)簡單,在高信噪比下特征易于提取,且特征具有明顯的物理意義,但這種提取方法受噪聲影響較大。
2)基于統(tǒng)計域的特征提取。統(tǒng)計域的特征主要是利用高階累積量,主要包括3階累計量和4階累計量:文獻[4]實現(xiàn)了利用高階累積量完成數(shù)字調(diào)制信號(BPSK/QPSK/ 16QAM/32QAM)分類;文獻[5]利用高階累積量實現(xiàn)了 4ASK、8ASK、BPSK、QPSK、8PSK、16QAM、32QAM、256QAM的分類;但利用提取高階累積量,需要將接收到的信號下變頻到基帶信號,這就需要精確的估計載頻,通常載頻的估計會有一定的誤差,于是文獻[6]提出了改進的方法,無需下變頻,實現(xiàn)了BPSK、QPSK、OQPSK、4PAM、8PSK、8QAM、16QAM、32QAM的分類;文獻[7]將高階累積量與支持向量機相結(jié)合,在信噪比為4 dB時,識別的正確率可以達到98 %;文獻[8]除了實現(xiàn)4ASK、8ASK、BPSK、QPSK、8PSK、16QAM 的識別,還實現(xiàn)了 MFSK(2FSK、4FSK、8FSK)的識別。利用高階累積量的最大優(yōu)勢是對于加性的高斯白噪聲具有很好的抗干擾性能。
3)基于變換域的特征提取。基于循環(huán)譜的特征提取是變換域特征提取的一種主要方法,不同的調(diào)制信號類型的頻譜特征可能相同,但對于不同的調(diào)制信號類型循環(huán)譜都不同。文獻[9]中通過估計不同調(diào)制信號的循環(huán)譜,在循環(huán)譜域提取提取 6個特征參數(shù),實現(xiàn) AM、DSM、VSB、SSB、ASK、FSK、PSK、MSK、QPSK的調(diào)制識別;文獻[10]利用高階累積量與循環(huán)譜域的特征參數(shù)相結(jié)合,首先利用高階累積量將數(shù)字調(diào)制信號分為{BPSK,2ASK}、{QPSK}、{2FSK, 4FSK}、{MSK}和{16QAM,64QAM}5類。然后利用高階累積量以及循環(huán)譜對{OFDM}、{16QAM, 64QAM}、{2ASK,BPSK}及{2FSK,4FSK}進行識別;文獻[11]中通過估計不同調(diào)制信號的循環(huán)譜,并將神經(jīng)網(wǎng)絡作為分類器,實現(xiàn)了 BPSK/QPSK/ FSK/MSK的分類識別。基于循環(huán)譜特征提取的方法的優(yōu)勢是對于不同的調(diào)制信號類型會有不同的循環(huán)譜,區(qū)分度明顯,且抗加性高斯白噪聲的性能較好,但計算量較大,不適合在工程中做實時分類。
文獻[12-13]中對調(diào)制信號做連續(xù)小波變換,實現(xiàn)了BPSK、2FSK、QAM、MSK、ASK信號類型的分類;文獻[14]中同樣利用小波變換實現(xiàn)了BPSK、2FSK、QAM、MSK、ASK信號類型的分類;文獻[15]利用改進的尺度縮放優(yōu)化小波變換算法,實現(xiàn)了 2ASK、4ASK、8ASK、16QAM、64QAM、128QAM的分類。由于Haar連續(xù)小波變換技術可以實現(xiàn)碼元內(nèi)小波系數(shù)恒定不變,但不同的調(diào)制類型碼元內(nèi)的小波系數(shù)可能不同,并且小波系數(shù)在變換點處發(fā)生突變,利用這一特點來實現(xiàn)不同調(diào)制類型的分類,同時它對于噪聲也非常敏感,在低信噪下,識別率較差。
此外還有基于譜分析的特征提取:文獻[16]中利用信號譜、平方譜以及 4次方譜實現(xiàn)了 BPSK/QPSK/OQPSK/π/4QPSK/MSK/FSK/FM/CW 的分類識別,信噪比大于12 dB時總體識別率達到95 %。
分類的方法大致有2類:傳統(tǒng)的基于決策樹的分類器;基于人工智能的分類器。傳統(tǒng)的分類器每個特征都需要對應設置一個判決門限,而判決門限的選取對識別的正確率影響很大;其次每個判決節(jié)點只能使用一個特征判決,這就導致識別的正確率不僅與特征量使用的先后次序有關,而且完全取決于每個特征的單次正確判決率。而人工智能的方法對判決門限的選取是自適應的,而且它每次判決都需要使用全部的特征向量,這就使得系統(tǒng)的識別成功率大大提高。
GNSS所處電磁環(huán)境復雜,多種類型干擾并存,并且還鮮有能應用于導航系統(tǒng)的干擾監(jiān)測產(chǎn)品。軟件無線電具有高度的靈活性、通用性和功能模塊化等特點,同時也是一種新的無線電系統(tǒng)體系結(jié)構(gòu),以開放性、可擴展、結(jié)構(gòu)精簡的硬件為通用平臺。因此本文主要基于軟件無線電架構(gòu),搭建了GNSS干擾盲識別系統(tǒng)。本系統(tǒng)可識別多干擾并存環(huán)境下的干擾類型以及每種類型干擾的參數(shù)。
1 系統(tǒng)設計
GNSS盲識別系統(tǒng)的總體結(jié)構(gòu)如圖1所示。
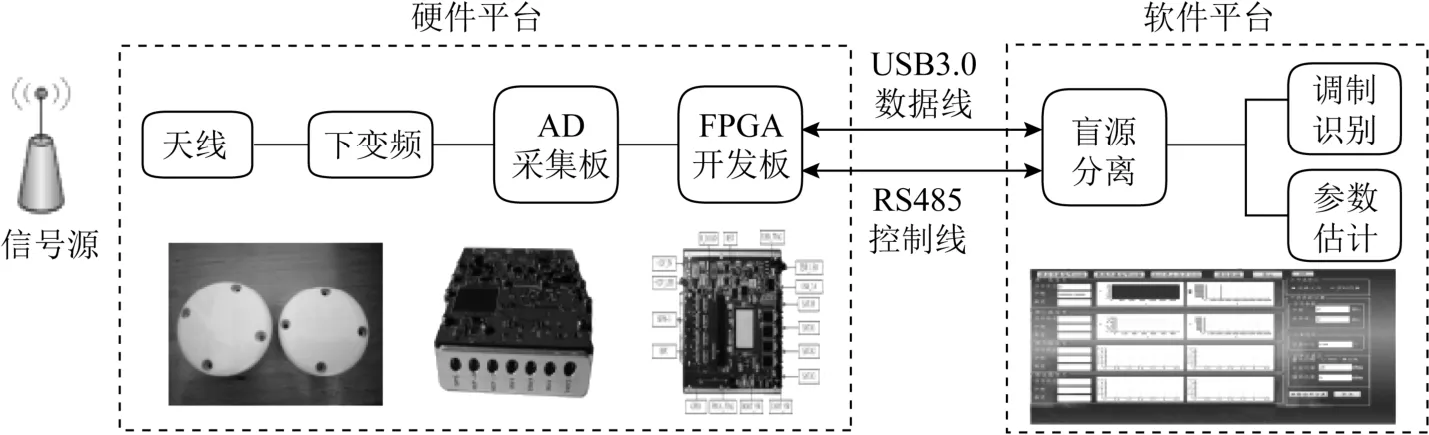
圖1 衛(wèi)星導航自適應干擾盲識別系統(tǒng)
硬件平臺由天線,下變頻器、AD采集板、USB3.0接口、RS485接口、FPGA芯片以及上位機組成。
硬件平臺完成信號采集并將采集的信號傳輸至上位機。在本系統(tǒng)中下變頻和 AD采用選用芯片AD9361完成,AD9361具有2個相互獨立的下變頻通道以及 12位模數(shù)轉(zhuǎn)換器(analog-to-digital converter,ADC)。系統(tǒng)中的FPGA采用Xilinx K7系列芯片。USB3.0作為數(shù)據(jù)總線用于傳輸數(shù)據(jù)、RS485作為控制總線傳送控制指令。
軟件部分在上位機上實現(xiàn),包括盲源分離、調(diào)制體制識別、調(diào)制參數(shù)識別3個功能。盲源分離模塊主要任務是將混疊的干擾信號進行分離,本系統(tǒng)中采用的是復數(shù)快速獨立分量分析法實現(xiàn)混合信號的盲分離。調(diào)制體制識別模塊的任務是識別分離后的每一路信號的調(diào)制功能。調(diào)制參數(shù)識別的任務是識別每種調(diào)制體制的中心頻點、帶寬、占空比等參數(shù)。本論文主要研究干擾信號調(diào)制體制識別以及參數(shù)識別技術。
2 干擾自適應盲識別方法
本論文基于特征參數(shù)的調(diào)制識別方法是利用二叉樹的分類方法把每個特征參數(shù)的值與預先設定的閾值進行比較,通過決策樹判決的方式實現(xiàn)多種調(diào)制方式的分類與識別,具體過程如圖2所示。
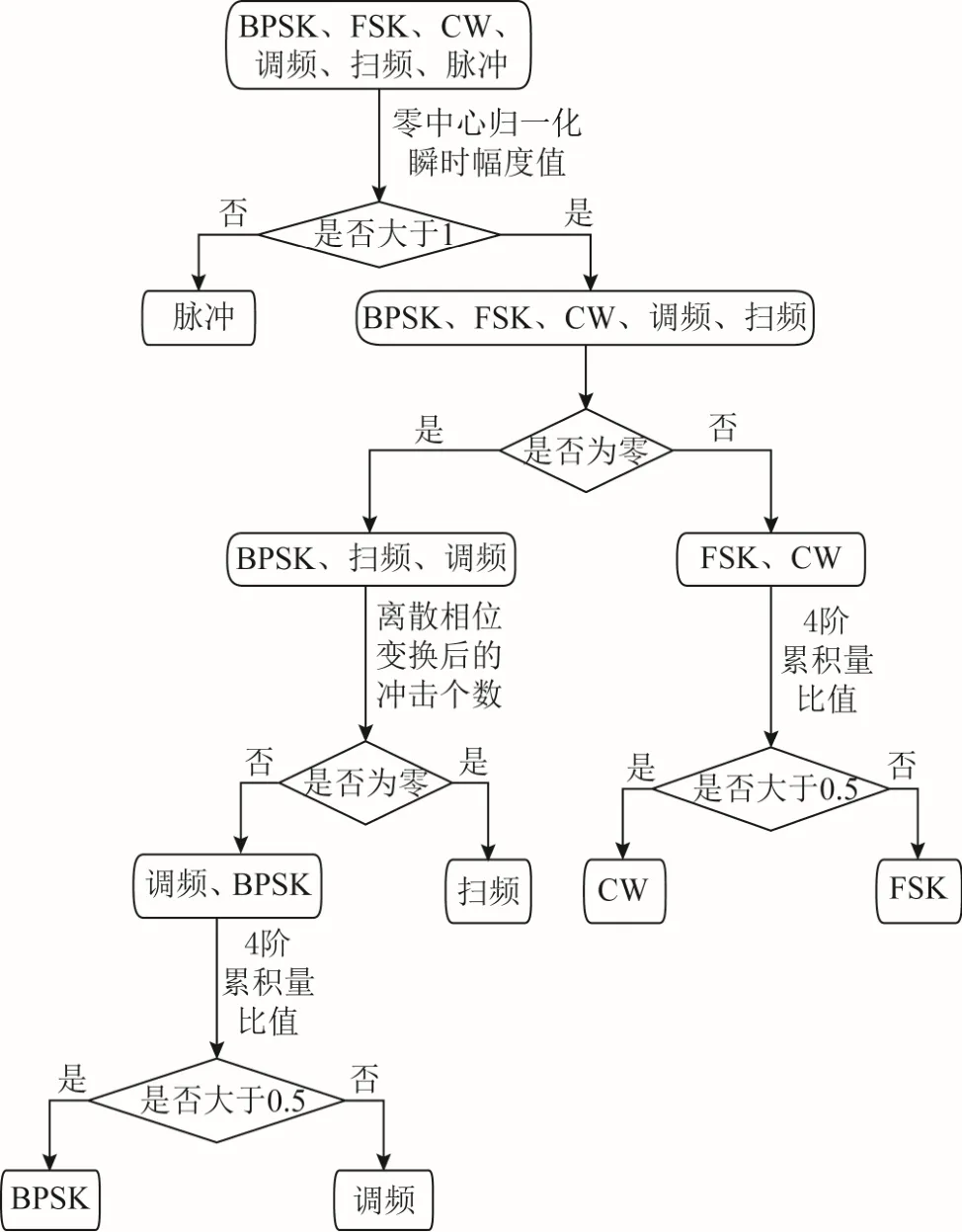
圖2 信號識別流程
2.1 干擾類型
本系統(tǒng)可以識別衛(wèi)星導航系統(tǒng)所面臨的主要干擾類型,包括單頻干擾、脈沖干擾、線性掃頻干擾、調(diào)頻干擾、BPSK及FSK干擾。
單頻干擾的數(shù)學模型為

式中:fc為信號的載頻;E為信號功率;t為時間。脈沖干擾(pulse)的數(shù)學模型為
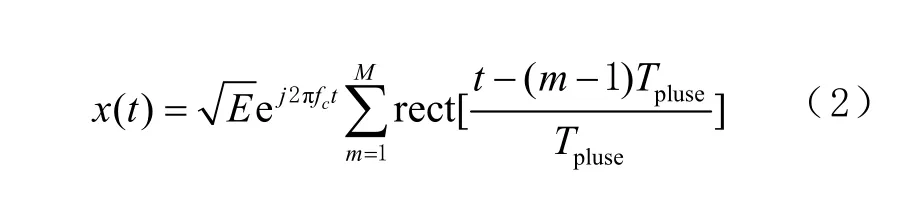
式中:M是信號的周期內(nèi)高電平個數(shù);Tpluse為脈沖周期;rect(t)為門函數(shù)。
掃頻干擾(sweep frequency,SW)的數(shù)學模型為

式中:Tsweep為掃頻周期;K為掃頻信號的頻率變化率。
BPSK干擾的數(shù)學模型為
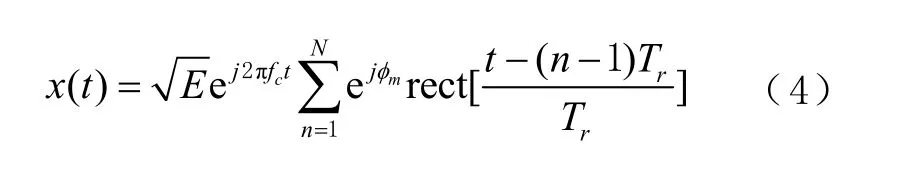
式中:Tr為碼元周期;m為進制數(shù),為0、π;N為碼元個數(shù)。
調(diào)頻干擾(frequency modulation, FM)的數(shù)學模型為

式中:fm為調(diào)制信號的頻率;mf為調(diào)制指數(shù)。
FSK干擾的數(shù)學模型為

式中Δf為信號的頻偏。
2.2 信號的特征提取
不同類型的調(diào)制信號,具有不同的特征,下面將詳細研究如何利用調(diào)制信號的不同特征對信號進行特征提取,本文利用了時域、頻域以及統(tǒng)計域的特征。
2.2.1 零中心歸一化瞬時幅度譜密度的最大值
在 2.1節(jié)描述的信號中只有脈沖信號的瞬時幅度是變化的,其他調(diào)制信號的瞬時幅值是恒定值,因此可以利用幅度信息來將脈沖信號與其他調(diào)制信號區(qū)分。
為了減少噪聲以及個別離群值的影響,須提高識別方法的穩(wěn)定性。首先,對瞬時幅度做零中心歸一化處理,再對處理后的信號做傅里葉變換。幅度恒定信號做零中心歸一化以后幅值在零附近波動,頻率遍布整個帶寬內(nèi),無明顯最值。脈沖信號的瞬時幅值隨著脈沖周期不斷的變化,其傅里葉變換后,在某個頻點處呈現(xiàn)出明顯的最值(如圖3所示)。因此可以利用

將脈沖信號識別出來。式(7)中:Ns為采樣點數(shù);為零中心歸一化瞬時幅度。零中心歸一化過程為
信號歸一化的表達式為
其中max(x)為信號的最大值。
信號的零中心化的表達式為

圖3 零中心歸一化瞬時幅度譜密度
2.2.2 沖擊個數(shù)1δ
不同的調(diào)制信號的功率譜計算公式為:
1)FSK
2)BPSK
3)CW

4)脈沖
式中:fs為采樣率;fT為脈沖頻率;l為占空比。
5)調(diào)頻

6)掃頻

式中K=B/Tsweep,B為帶寬。
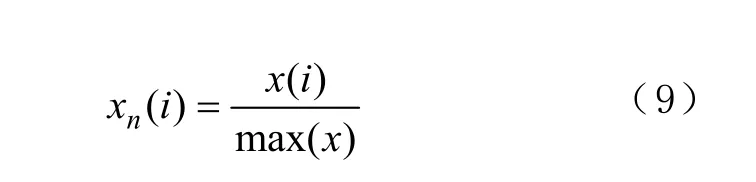
從圖4的功率譜可以看出,F(xiàn)SK、CW的功率譜都有沖擊函數(shù),而其他的調(diào)制類型的信號沒有,由此可以根據(jù)沖擊個數(shù)1δ將FSK、CW與其他類型的調(diào)制信號區(qū)分。
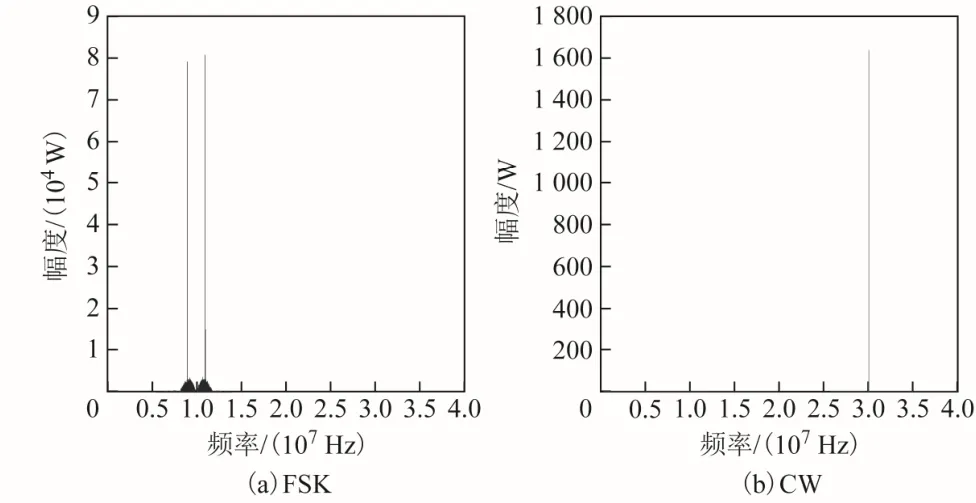

圖4 5種干擾信號的頻譜
2.2.3 沖擊個數(shù)δ2
由于線性調(diào)頻信號和單音余弦調(diào)頻信號頻率是不斷變化的,其在時域和頻域都沒有區(qū)分度,因此可以通過離散相位變換區(qū)分,離散相位變換定義為

式中:τ為時間延遲;x*(n)為x(n)的共軛。根據(jù)離散相位變換的定義,可以得出線性掃頻信號的離散相位變換后的表達式為

根據(jù)式(18)可以得出離散相位變換后的掃頻信號為一個單頻信號。
調(diào)頻信號的離散相位變換后的表達式為

根據(jù)式(19)可以得出離散相位變換后的調(diào)頻信號仍然為一個具有帶寬的信號,即BPSK為
根據(jù)式(20)可以得出離散相位變換后的BPSK信號為基帶的碼元信號。
對離散相位變換后的信號做傅里葉變換后,掃頻信號含有沖擊函數(shù),而BPSK和調(diào)頻信號沒有沖擊信號,由此可以將掃頻信號識別出來。
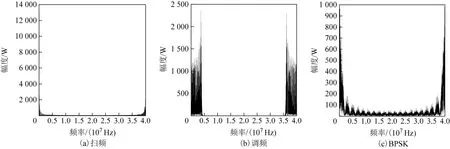
圖5 3種干擾信號離散相位變換后的頻譜
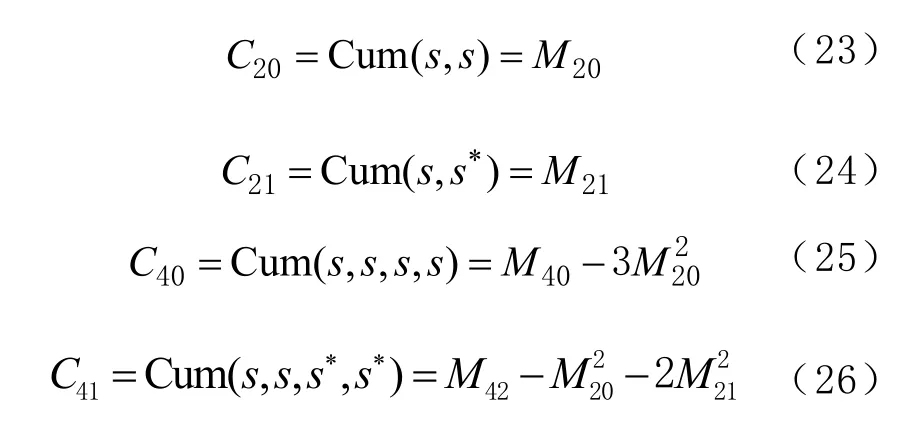
2.2.4 高階累積量
因此對于均值為零的平穩(wěn)復基帶隨機過程,2階和4階累積量的表達式分別為
根據(jù)高階累積量的定義可以知道,對于實信號它反映的是不同調(diào)制信號其隨機變量的概率密度的分布情況,對于復信號它反映的是不同調(diào)制類型信號的星座圖的分布情況。并且對于不同的調(diào)制信號類型的高階累積量可能相同,但是不同的高階累積量的調(diào)制信號類型肯定不同。因此可以利用高階累積量來進行信號調(diào)整類型的識別。利用上述公式計算不同調(diào)制信號的高階累積量(如表 1所示)。令根據(jù)表格可以將單載波干擾和FSK區(qū)分開、調(diào)頻干擾和BPSK干擾區(qū)分開。
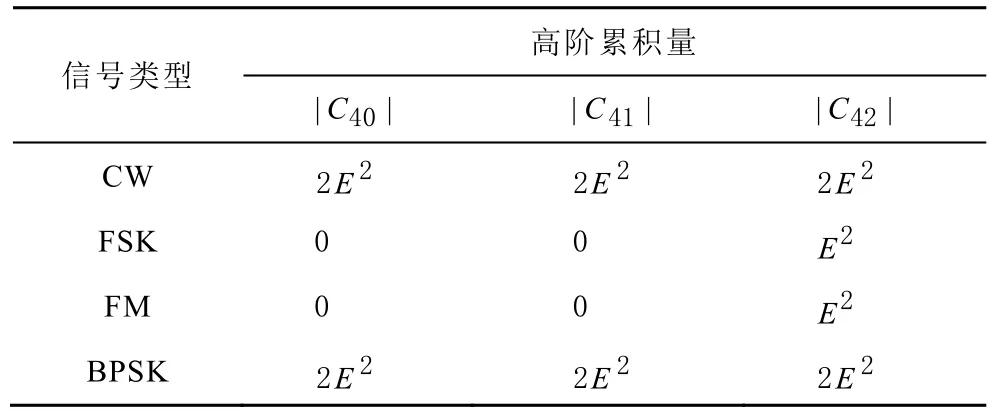
表1 高階累積理論值
2.3 參數(shù)估計
本文中主要估計干擾信號的載波和碼速率,并且估計了脈沖信號的周期和占空比。
2.3.1 載波估計
本文中利用頻域估計方法將信號變換到頻域,利用信號的對稱性估計信號的載頻。公式為
式中:X(k)為信號的傅里葉變換:N為傅里葉變換的點數(shù)。
2.3.2 碼速率估計
碼速率估計的精確與否直接關系到接收端定時序列的重構(gòu)以及基帶信號的正確抽判,因此它也是信號估計的一個重要參數(shù)。本論文中利用小波變換的方法估計數(shù)字調(diào)制信號BPSK和FSK的碼速率。具體步驟如下:
以Haar函數(shù)作為母函數(shù),對接收信號進行2次小波變換后,圖中可以看出BPSK和FSK只有在碼元變換的時刻有沖擊信號,而碼元周期內(nèi)為常數(shù)值,接著對小波系數(shù)進行傅里葉變換,這樣就根據(jù)頻譜的最大值與次大值之間的頻率間隔得到碼元信號的頻率(如圖6、圖7所示)。
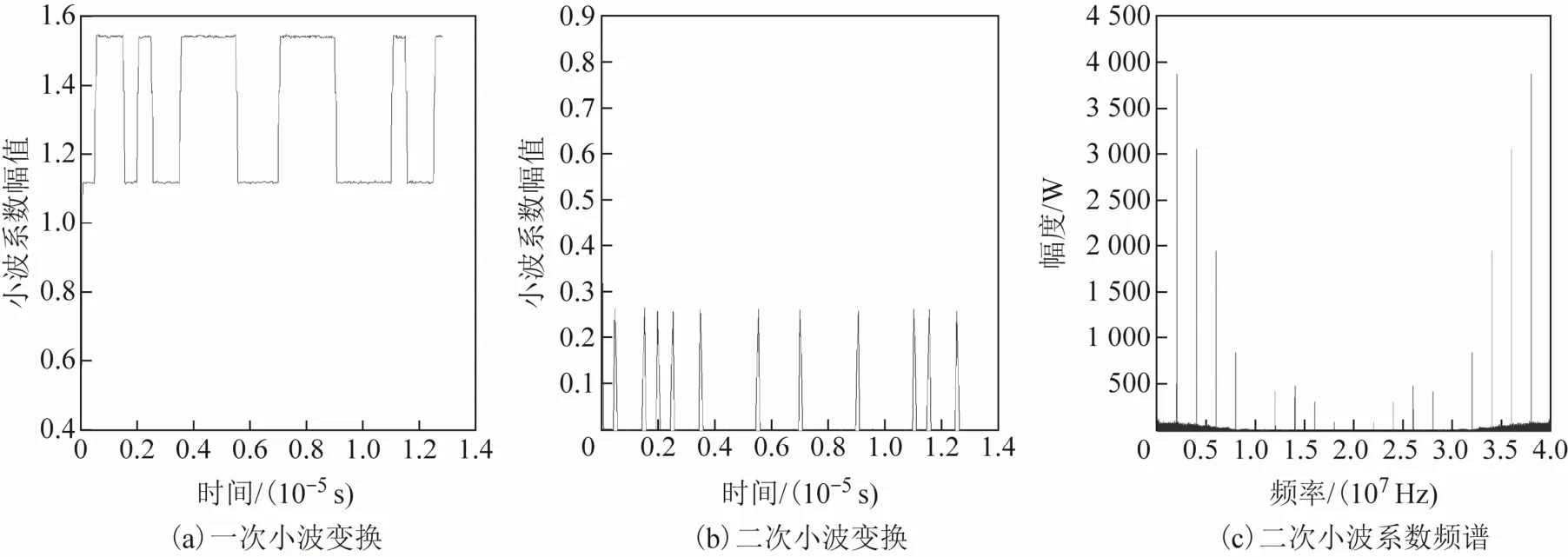
圖6 FSK的小波變換
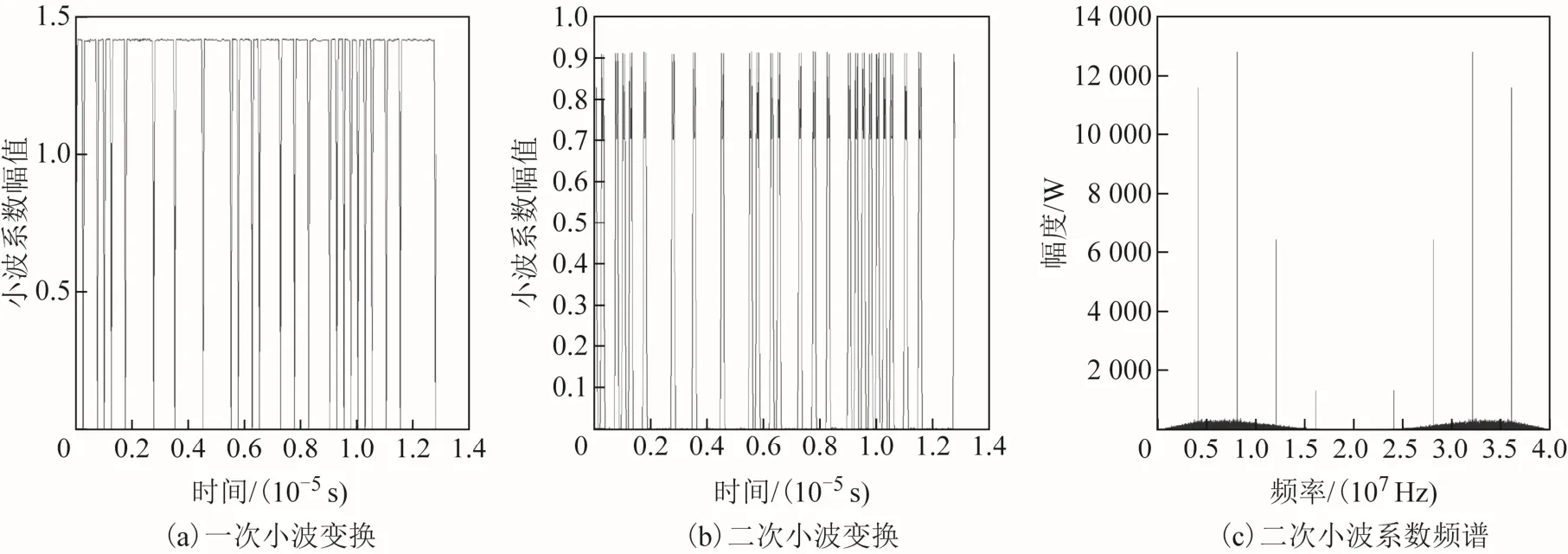
圖7 BPSK的小波變換
2.3.3 脈沖周期和占空比的估計
脈沖信號瞬時幅度如圖8所示。
1)估計信號的占空比。首先把信號下變頻到0、1電平的基帶信號,即對復信號求模值即可。其次,估計0、1電平的均值,求大于均值的點數(shù),再用大于均值的點數(shù)除以總的點數(shù),即占空比。
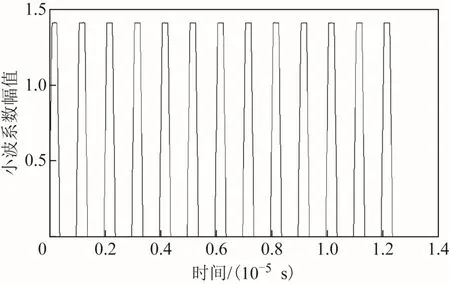
圖8 脈沖信號的瞬時幅度
2)估計信號的脈沖周期。估計信號的頻譜為
根據(jù)上式可以知道,頻譜的最大值和次大值的間隔為脈沖的頻率。
3 實驗與結(jié)果分析
典型的模式干擾盲識別系統(tǒng)主要由信號預處理、特征提取和分類判決3個部分組成,該過程的框圖如圖9所示。
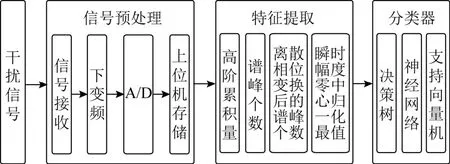
圖9 模式識別系統(tǒng)流程
3.1 仿真與結(jié)果實驗
1)實驗設置。為了驗證特征參數(shù)提取的有效性,實驗分別產(chǎn)生6種干擾信號,每種調(diào)制類型進行100次實驗,信噪比為20 dB,干擾信號調(diào)制參數(shù)如表2所示。

表2 6種仿真干擾信號參數(shù)設置
2)實驗結(jié)果與分析。根據(jù)以上的信號調(diào)制的參數(shù)設置估計出每個特征參數(shù),取 10次實驗的平均值。實驗結(jié)果表明在以上信號調(diào)制參數(shù)設置下,以上5個特征參數(shù)完全識別6種調(diào)制類型的信號。特征估計參數(shù)如表3所示。

表3 6種仿真干擾信號特征參數(shù)
3)根據(jù)參數(shù)估計所用到的方法,對脈沖信號的占空比以及脈沖周期、BPSK和FSK的碼速率以及載頻進行參數(shù)估計(如表4所示)
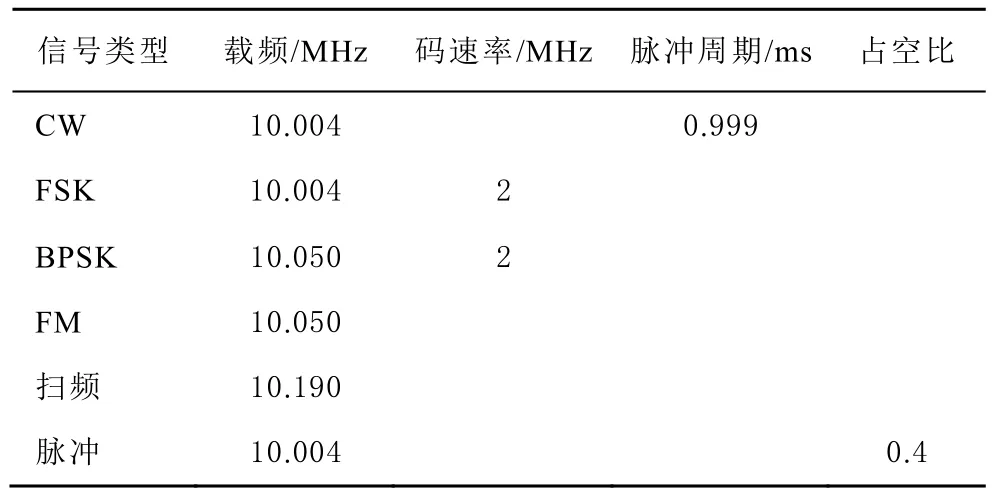
表4 3種干擾信號的參數(shù)估計
根據(jù)表格顯示的特征參數(shù)估計值與理論值相比較,這些特征參數(shù)可以對6種干擾信號進行分類。對干擾信號的調(diào)制參數(shù)的估計可以認為誤差都控制在1 %以內(nèi)。
3.2 實測實驗
為測試上述方法的實際應用效果,在實驗環(huán)境中進行了測試。實驗設置如圖10所示,實驗的信號參數(shù)設置如表5、表6所示,實測實驗結(jié)果表明4個特征參數(shù)可以有效對信號進行分類。表 5、表 6分別是接收的實際信號所設置的參數(shù)以及所提取的特征參數(shù)。
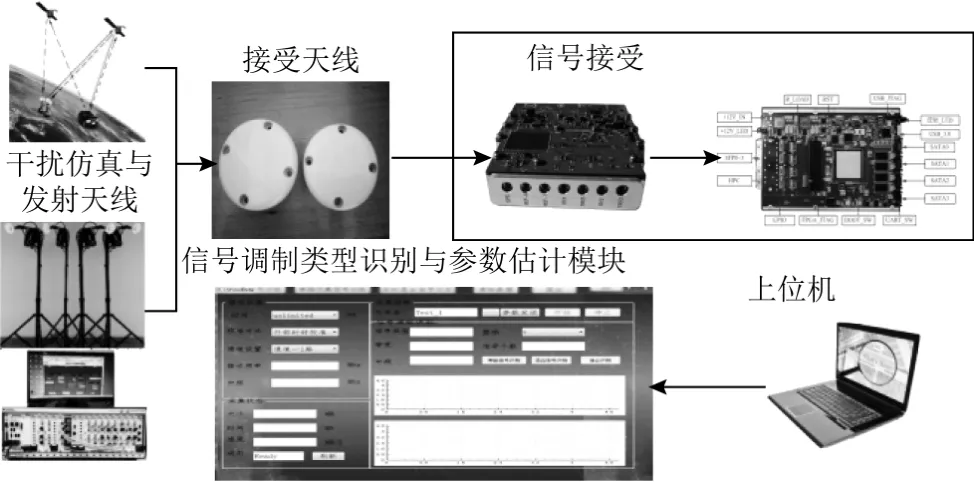
圖10 實驗硬件設置及軟件設置
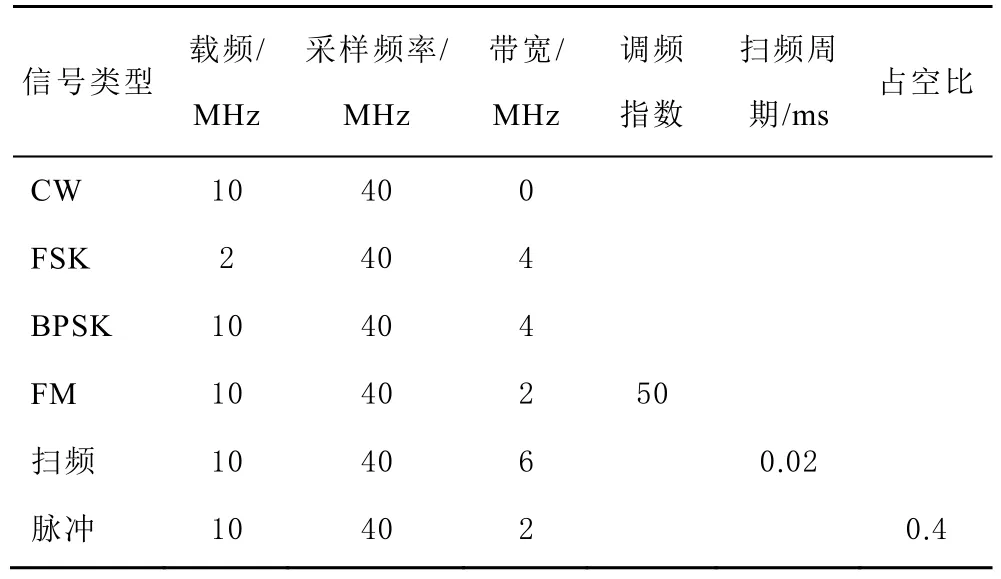
表5 6種實際接收干擾信號參數(shù)設置
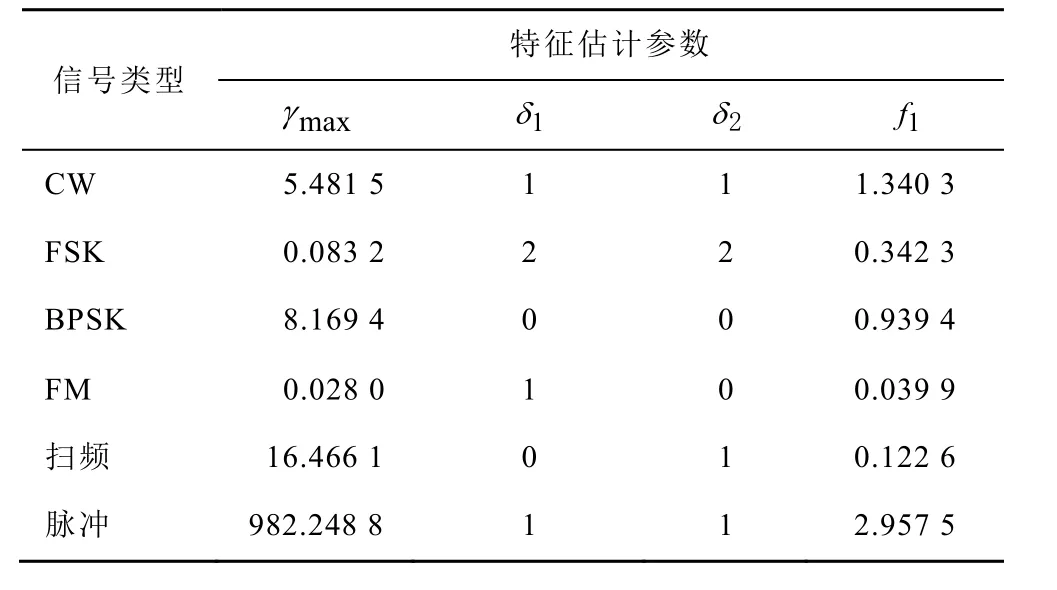
表6 6種信號的特征參數(shù)
4 結(jié)束語
由于導航干擾信號類型的多樣性,本論文在特征提取時也采用了多種方法,將高階累積量、譜分析以及離散相位變換相結(jié)合,得到5個特征參數(shù):4階累積量的比值、譜峰個數(shù)、離散相位變換后的譜峰個數(shù)、瞬時幅度零中心歸一化的最大值。實現(xiàn)6種導航干擾信號的分類。在仿真實驗中也證明了混合識別算法可以有效地識別數(shù)字調(diào)制信號與模擬調(diào)制信號的6種干擾信號;最后利用實驗室現(xiàn)有的信號采集設備進行驗證,具有較好的工程實用價值。
猜你喜歡
中等數(shù)學(2022年2期)2022-06-05 07:10:50
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
電子制作(2019年15期)2019-08-27 01:12:00
中學生數(shù)理化·七年級數(shù)學人教版(2019年4期)2019-05-20 10:06:32
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
中學生數(shù)理化·七年級數(shù)學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
中國生物醫(yī)學工程學報(2017年6期)2017-02-10 05:11:45
