基于FPGA的飛行機器人的研究與方案設計
2019-06-11 09:53:56李世文謝志能
電子技術與軟件工程 2019年7期
文/李世文 謝志能
隨著通信技術的不斷飛速發展,飛行機器人的各項性能和指標都得到了很大程度的改進。國內外對飛行機器人的研究也是越來越熱,在這方面的投資力度也非常大。目前來說飛行機器人無論是在民用上還是軍事上的應用也是越來越廣。
當前飛行機器人在飛行距離近、控制不方便,通信范圍小,很難能實現遠距離的控制和視頻傳輸方面,同時怎么去降低飛行機器人的功耗,怎么去提高飛行機器人的智能識別效果等都是當前需要解決的難題。結合實際情況,我們在設計方案的時候,采用現階段的4G通信網絡、近距離Wi-Fi通信等方面進行數據和圖像方面的傳輸。在目標檢測是識別方面,我們采用FPGA來對目標進行檢測是識別,這樣可以保證識別的效率,降低功耗。
1 總體方案設計
總的來說,本文的目標是實現一個具有自動對目標進行檢測和識別的飛行機器人控制系統,并且進一步提高整個系統的智能識別能力和圖像傳輸的速率。
具體系統方案設計如圖1所示,整個系統由飛行器、控制端和上位主機所構成,其中主機與控制的可以通過USB進行通信,可以通過主機顯示飛機的飛行狀況,同時對飛行器進行相關的參數設置。飛行器主要是由FPGA、無線傳輸、電機控制、攝像頭等所構成。控制端主要用來對飛行器進行控制,它主要包括4G等無線傳輸模塊、控制系統、顯示單元。
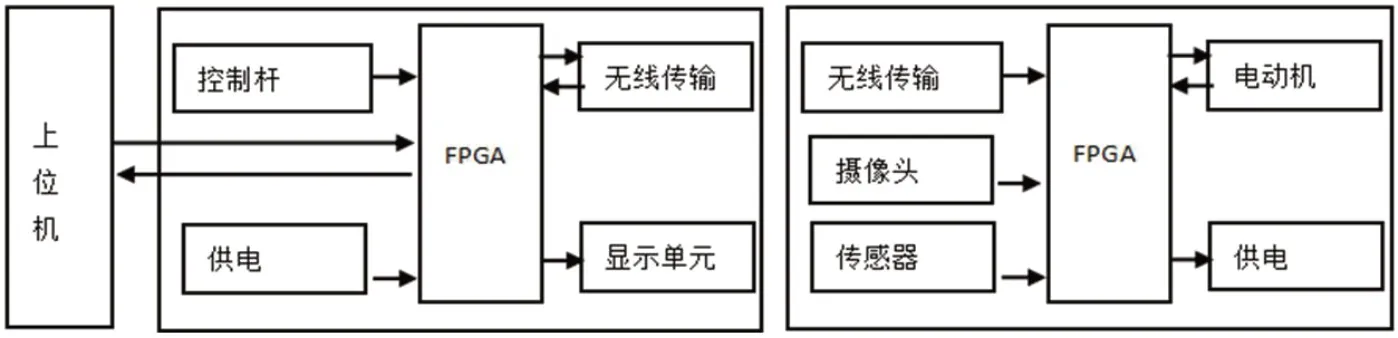
圖1:飛行機器人的設計方案
2 飛行機器人的飛機部分的整體原理圖
飛行機器人設計主要包括圖像處理、傳輸和去飛行姿態控制系統,同時對相應目標進行相應的檢測和識別。飛行機器人的姿態控制系統的設計目標是保證在飛行的時候能夠保持機身穩定,而視頻圖像的采集與圖像的傳輸,是可以在4G通信網絡、射頻傳輸兩種機制中切換和接力,當飛行機器人距離遠,范圍較大的時候可以由4G網絡進行圖像的傳輸,因為4G網絡經過這么多年基站的建設,網絡覆蓋非常廣,所以對飛行機器人而言采用該傳輸模式是一種比較好的選擇。在飛機控制和圖像算法處理中,考慮到FPGA的優越性能,我們采用FPGA來實現數據圖像的處理和相應的控制。在飛行機器人的自動檢測和目標跟蹤方面,目標跟蹤和檢測可以采用幀差法和數學形態技術來實現,進一步提高系統的目標識別率。
具體來說飛行機器人系統的飛機部分的整體原理圖如圖 2所示。其中飛機部分包括:攝像頭、飛機加速度器、角速度計、氣壓傳感器、數字羅盤、存儲單元、電動機、4G模塊和Wi-Fi模塊等部分。
飛控系統主要有FPGA了控制實現,相應傳感器把數據傳給FPGA后,FPGA可以通過控制電機進行對當前姿態進行相應的調整,與此同時FPGA把相應的參數發送給控制端的顯示器進行顯示,同時通過 USB 連接的上位機可以顯示飛機的姿態變化。同樣通過上位機設置飛行機器人的相應的參數。視頻采集與傳輸系統硬件設計,這里的視頻采集與傳輸系統硬件設計也是采用FPGA的來進行的。該攝像機可以通過無線或者是4G網絡將采集到的圖像信息實時發送到手機客戶端和PC 客戶端。所以FPGA需要完成圖像實時采集、壓縮編碼、圖像處理和存儲等功能。
3 姿態控制系統與圖像處理算法
姿態控制是系統的關鍵,系統上電后,由FPGA對相應的外設進行初始化,初始化后飛機就可以接收控制器發出的控制信息了,如果飛機收到對應的控制信息就由FPGA去控制電機而實現飛機的相關飛行動作,比如說是翻轉、偏航、垂直下降與上升。
視頻采集流程是這樣的,首先系統啟動后,由FPGA對攝像頭進行初始化,通過I2C對攝像頭進行初始化配置,配置好之后圖像數據首先保存在FPGA中的WFIFO存儲器中,然后通過控制把WFIFO中的數據保存到DDR存儲器中,然后FPGA通過RFIFO把熟從DDR存儲器中讀取出來,進行圖像處理,圖像處理包括幀差法運動目標檢測和跟蹤。
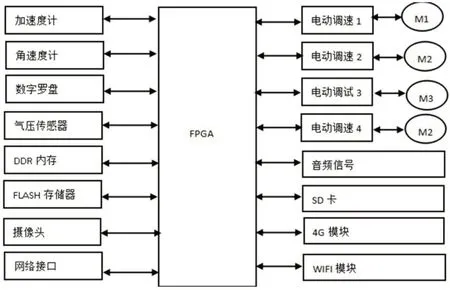
圖2:飛行機器人的飛機部分原理圖
4 結束語
飛行機器人的設計是一個綜合性很強的課題,一般主要包括研究和軟件設計,現階段飛行機器人的性能指標主要包括續航能力,目標的定位和跟蹤、和圖像的采集和識別能力,飛行路徑的規劃、圖像數據的傳輸能力等相關技術。針對這種本文提出了一種基于FPGA的飛行機器人的設計方案,由于FPGA的實時性好、運算速度快、可擴展性強,所以在整個系統的設計中利用其來完成相關的圖像處理,可以節約系統延時,降低功耗的作用,所以該方案具有較大的應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
