基于遺傳算法的永磁同步電機自抗擾控制
2019-06-11 08:50:08
浙江工業大學學報 2019年4期
(浙江工業大學 機械工程學院,浙江 杭州 310014)
永磁同步電機(Permanent magnet synchronous-motor, PMSM)具有結構簡單、工作效率高等特點,在工業、交通、軍事和航空等重要領域得到廣泛應用[1]。但永磁同步電機存在強耦合、參數易變和非線性等特點[2],要考慮參數及負載變化對控制性能的影響。目前常用的控制策略如PID控制[3],它是以系統的偏差進行控制,控制簡單,易于實現,但是PID是采用線性方法,對于非線性系統來說,在抗擾動方面難以實現高精度的控制[4-5]。
電機運行過程中的負載、參數變化等因素[6]限制了經典PID控制方法的應用范圍。如果是固定擾動,可以通過前饋環節對擾動進行補償,但在實際應用中,擾動往往是變化的,不可測量的,對系統造成不可估計的影響,所以要對系統內外擾動進行觀測,以便系統根據得到的數據及時作出調整。自抗擾控制(ADRC)不依賴于被控對象準確的數學模型[7-9],系統內部及外部擾動由觀測器觀測出來并加以補償,所以對系統參數變化和外部擾動不敏感;同時,ADRC控制器還設置了跟蹤微分器和非線性狀態誤差反饋控制[10-14],實現無超調快速跟蹤。筆者在矢量控制與PID控制[9]的基礎上采用ADRC技術對永磁同步電機進行控制。該系統可實現位置、速度和擾動的觀測,用ADRC控制器代替矢量控制中的位置和速度控制器,電流環采用PI控制器。
1 問題描述
PMSM在兩相同步旋轉d—q坐標系下,采用id=0矢量控制策略[10-14],電機運動方程為
(1)
ADRC的二階控制對象為
(2)
式中:u為系統控制量;b為u的系數;f(x)為系統總擾動。
(3)
將PMSM數學模型轉化為
(4)
2 PMSM的ADRC位置控制器設計
ADRC由3 部分組成:安排過渡過程、擴張狀態觀測器和非線性組合[7],結構框圖如圖1所示。
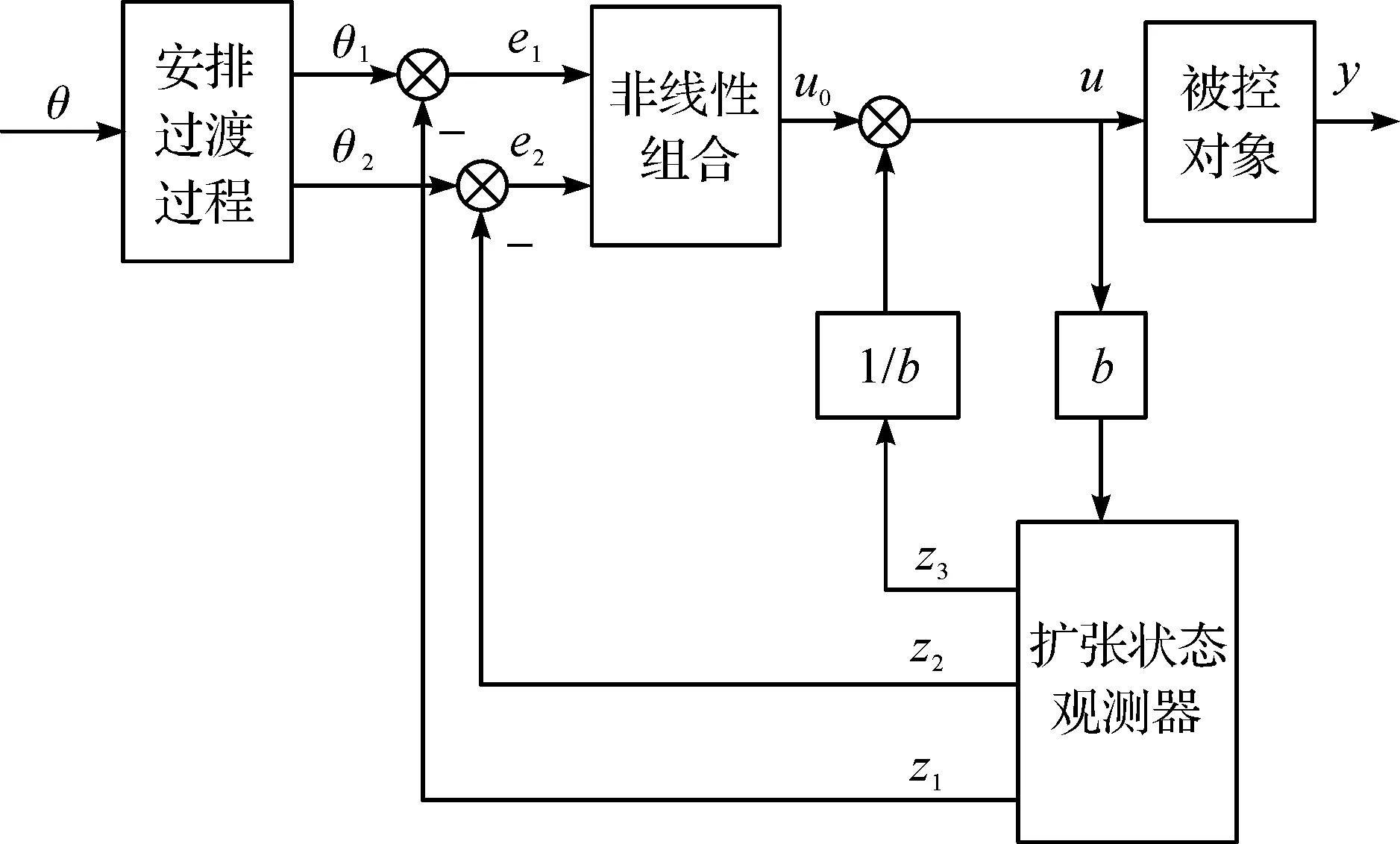
圖1 二階自抗擾控制器結構框圖Fig.1 Structure block diagram of two order auto disturbance rejection controller
在對系統狀態進行觀測之前,需要設計一個微分器來實現過渡,使系統可以無超調跟蹤,微分器采取近似微分的方法來實現。
跟蹤微分器(TD)形式為
(5)
式中:h為采樣周期;e0為位置跟蹤誤差;r為可調系數,r越大上升越快。fst函數為
(6)
其中
(7)

擴張狀態觀測器(ESO)[6]是整個自抗擾控制系統的關鍵部分,它能觀測系統狀態和擾動,實時反饋給系統進行補償,其表達式為
(8)
其中
式中:z1,z2,z3分別為位置θ,速度ω還有總擾動f的估計值。
補償后系統控制量為
(9)
為了克服系統擾動,提高系統魯棒性,自抗擾控制器的非線性組合采用基于模型的PI魯棒控制[15]。
由前面所述,永磁同步電機伺服系統描述為
(10)
位置跟蹤誤差為e1=θ-z1,速度跟蹤誤差為e2=ω-z2,定義誤差函數為e=e2+5e1,定義x=e+z2,則有
(11)
控制率設計為

(12)


(13)
其中
下面進行穩定性分析,取Lyapunov函數為
(14)
對V進行求導,并將式(13)代入,可得
(15)
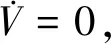
基于矢量控制[8]的PMSM自抗擾位置控制器系統框圖如圖2所示。
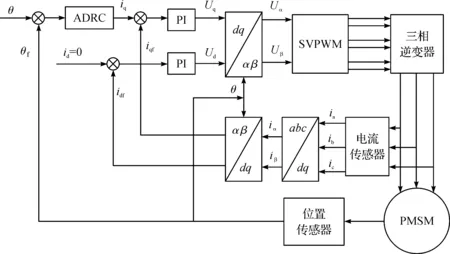
圖2 ADRC位置控制器系統框圖Fig.2 Block diagram of ADRC position controller system
3 基于遺傳算法的ADRC參數優化
上述ADRC控制器待優化的參數有ESO的β1,β2,β3,考慮系統整體穩定性的要求,觀測器的觀測值應該盡可能接近系統的實際狀態,所以,遺傳算法的目的是使觀測的位置和總體擾動誤差盡可能低。將遺傳算法適應度函數選擇為位置誤差及總和擾動誤差的平方根值,設計適應度函數為
(16)
式中:N為種群個體數,這里N=50;w1,w2為權重,w1=0.7,w2=0.3。
1) 參數編碼:將待優化的參數β1,β2,β3作為個體的3 個基因進行編碼[16]。隨機產生個體數為50的初始種群Ai(i=1,2,…,50),初始種群是參數假設解的集合,最優參數從這些初始種群出發,經過一系列遺傳算法優化求出。種群的搜索范圍為β1∈[0,200],β2∈[0,800],β3∈[0,1 800]。
2) 選擇:選擇的目的是將有用的遺傳信息保留下來,提高收斂速度。個體選擇采用最佳保留選擇,即將輪盤賭方法選擇的當前群體中使適應度函數小的群體[17],遺傳到下一代群體中。
3) 交叉和變異:交叉即按照概率Pc選擇2 個基因進行同位置的染色體互換;變異即按照概率pm對基因某些位進行取反[18-19],即0變1,1變0。交叉概率Pc和變異概率Pm的選擇按照自適應調整的方法進行,這樣可以避免固定的交叉變異概率值對環境的不適應,2 個值分別進行適應度調節,即
(17)
(18)
式中:fmax為適應度最大值;favg為每代適應度均值;f為兩個交叉個體中適應度最大值;f*為變異個體的適應度值。
4) 全局最優收斂:當遺傳代數達到設定值或者適應度值不再劇烈變化時,則算法結束,全局收斂,否則返回2)循環執行。最終得到優化后的參數值為β1=103.95,β2=398.57,β3=1 132.26。
遺傳算法流程圖及優化框圖分別如圖3,4所示。
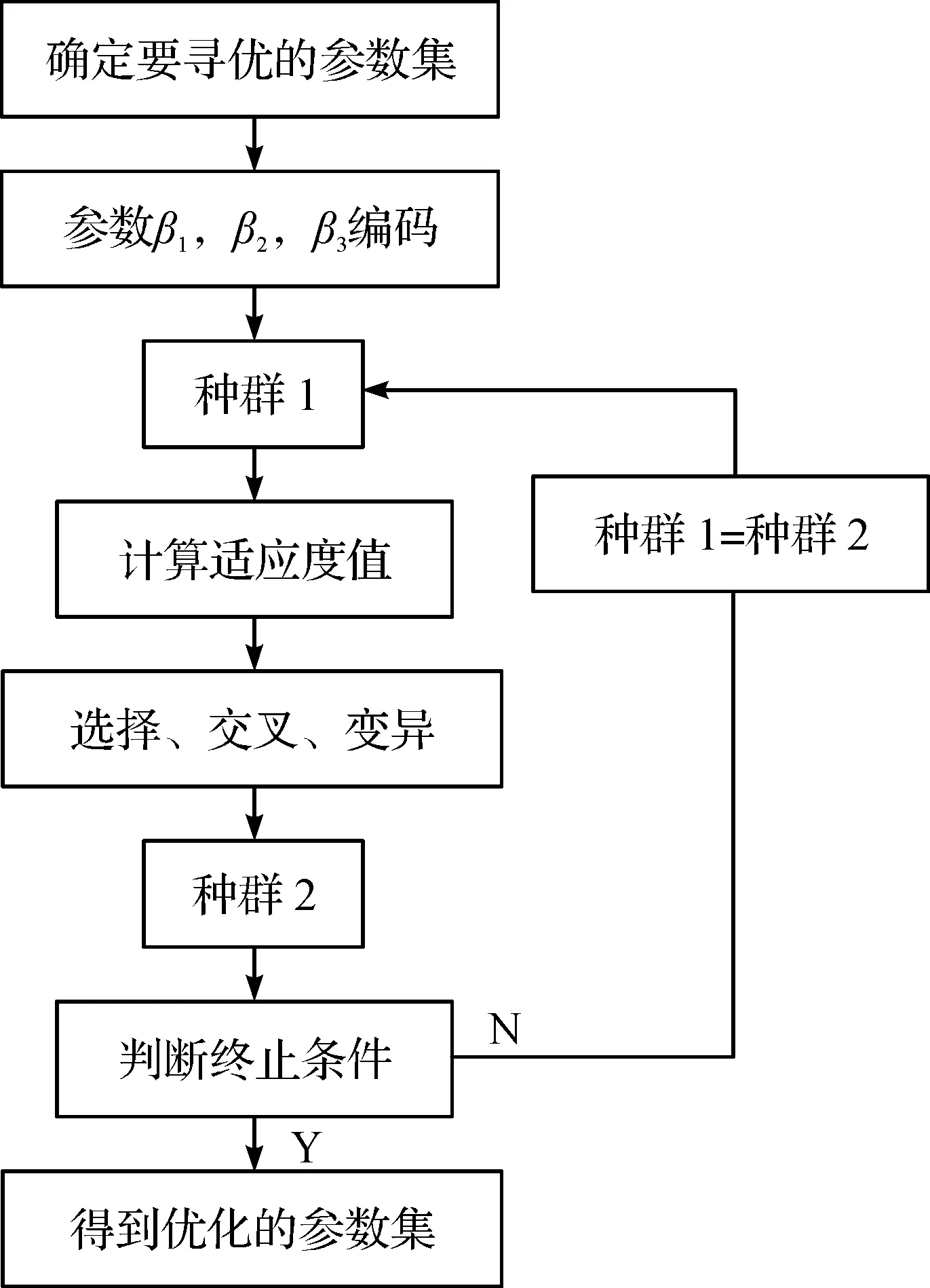
圖3 遺傳算法流程圖Fig.3 Flowchart of genetic algorithm
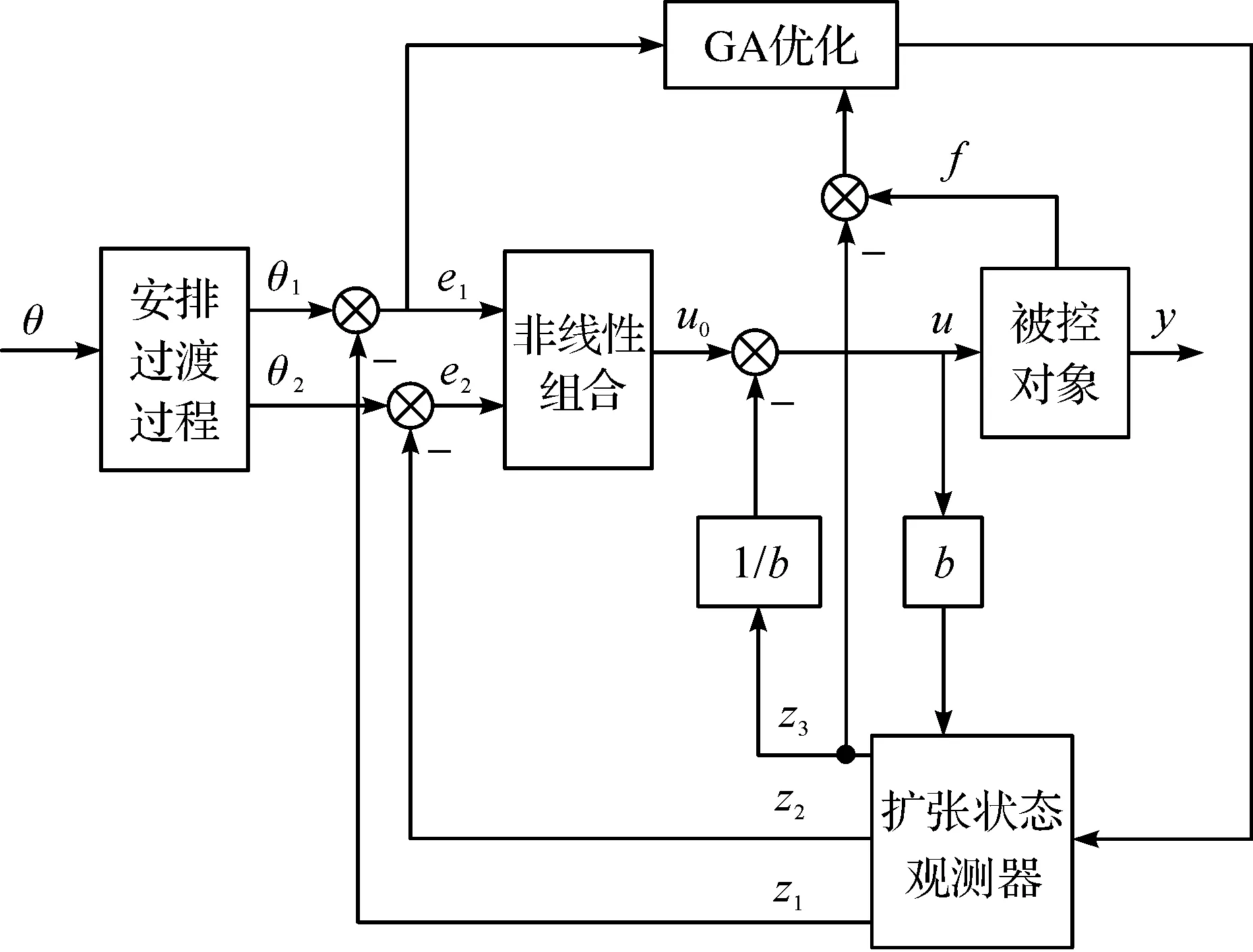
圖4 遺傳算法優化ADRC參數框圖Fig.4 Block diagram of optimizing parameter of ADRC by genetic algorithm
4 仿真及實驗分析
永磁同步電機的負載和參數隨環境不同而改變,因此仿真中要研究加負載和參數變化時系統的定位精度。在Matlab/Simulink中搭建仿真模型,采用位置環自抗擾控制器,仿真步長h=0.001 s。仿真中所用的PMSM參數如表1所示。
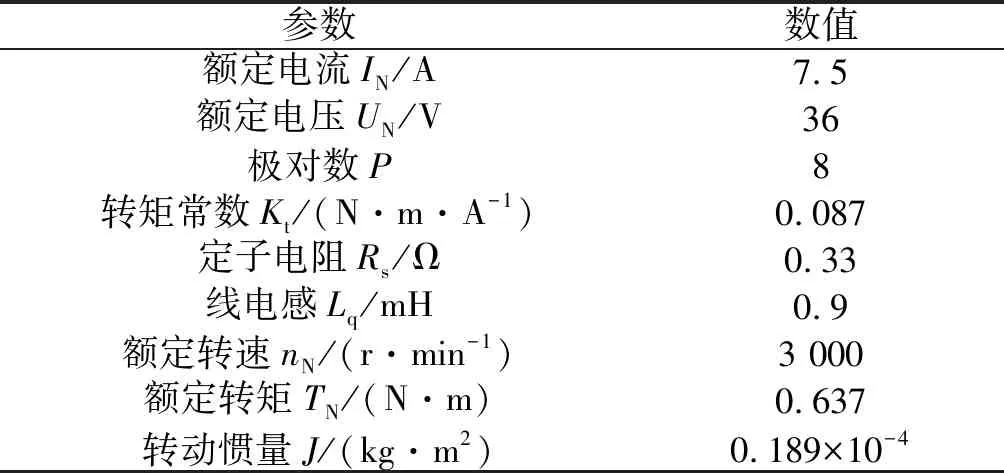
表1 電機參數表Table 1 Motor parameter
ADRC的部分參數采用遺傳算法進行優化,為了驗證優化后控制器的性能,仿真中其他條件相同,給定位置為5 °,10 °時,比較遺傳算法優化后的ADRC控制器與經驗整定參數的ADRC控制器的控制性能。對比圖如圖5所示。
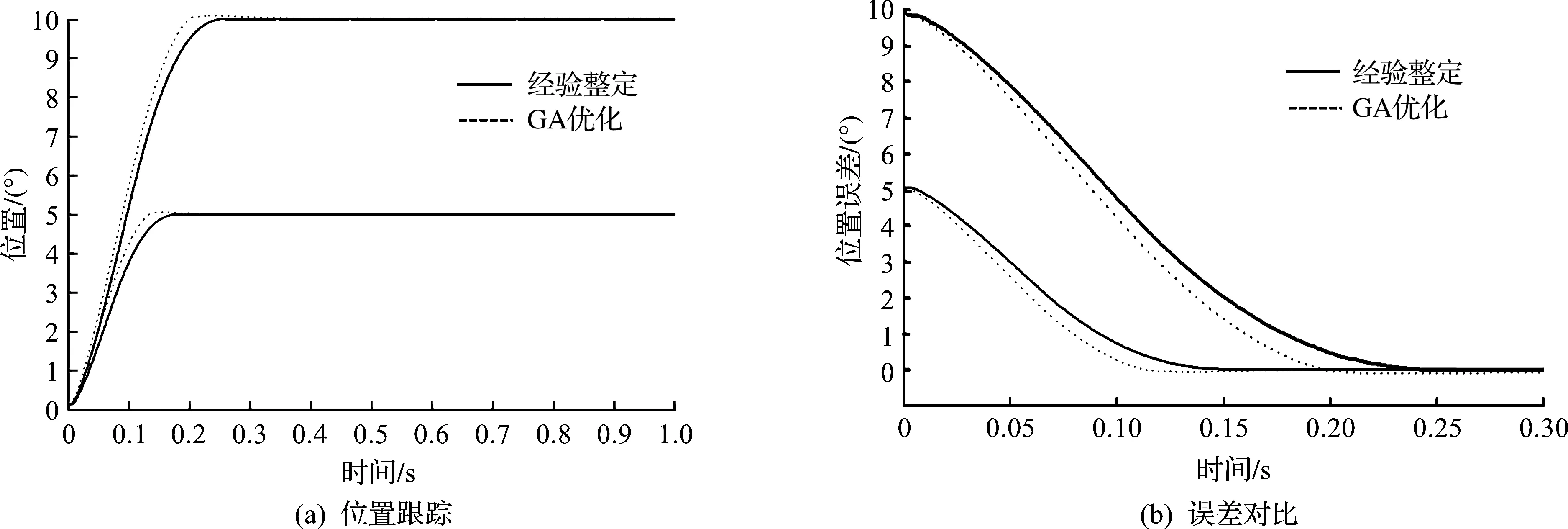
圖5 GA優化前后系統位置跟蹤Fig.5 System location tracking before and after GA optimization
由圖5可得:經過遺傳算法優化后的系統跟蹤速度明顯高于未優化的系統,跟蹤誤差低于后者,位置為10°,5°時調節時間比經驗整定參數的系統分別快0.04,0.03 s。下述關于ADRC位置控制器系統仿真均是優化后ADRC位置控制器。
系統參數轉動慣量的變化可能會對控制穩定性造成影響,為了驗證ADRC控制系統在參數變化環境下的跟蹤精度,給定信號相同時,比較轉動慣量為J,2J時系統的位置跟蹤情況,如圖6所示。
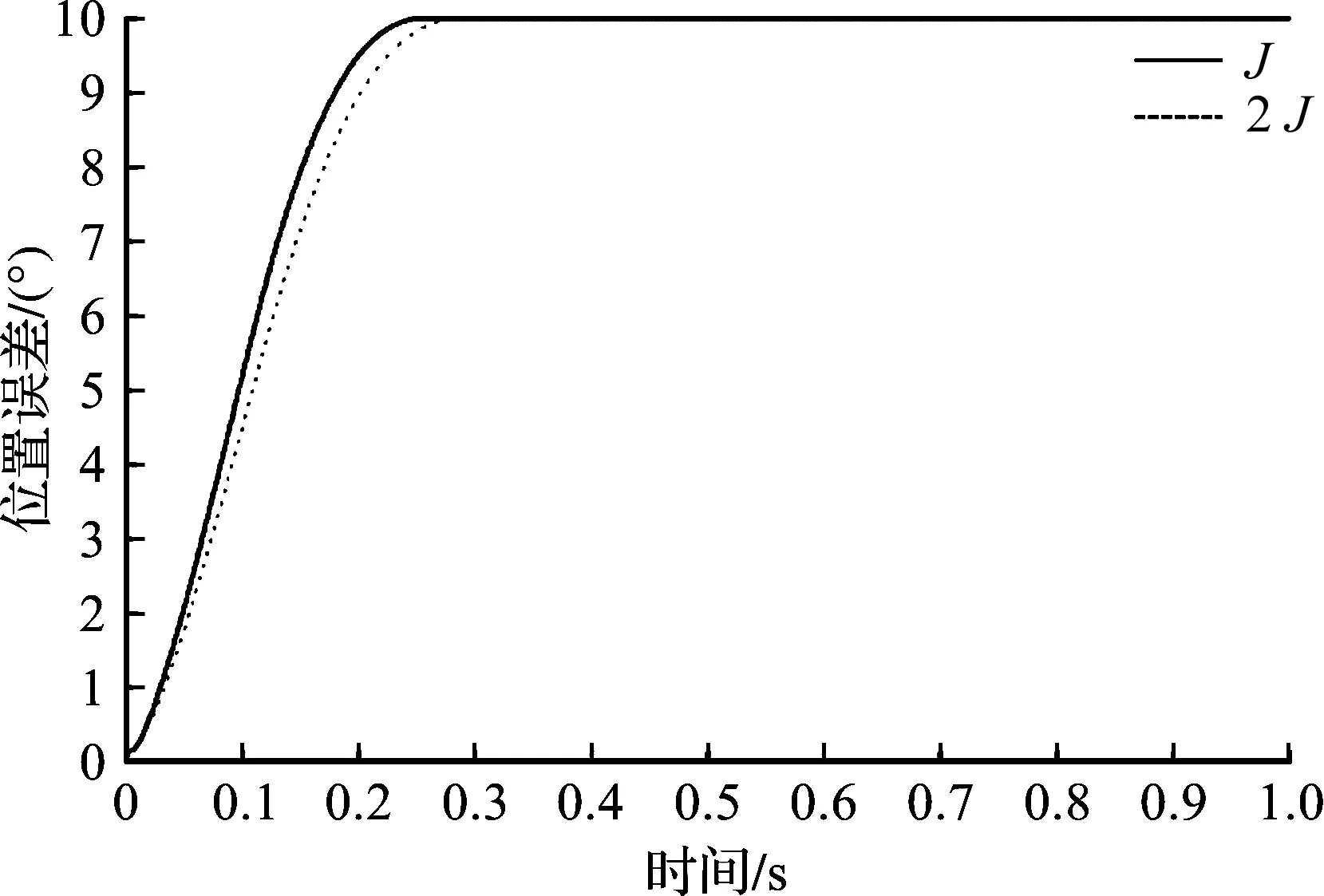
圖6 轉動慣量分別為J和2J系統位置跟蹤Fig.6 Position tracking when the moment of inertia are J and 2J
從圖6可得:當系統參數轉動慣量變為2J時,調節時間僅下降0.014 s,系統的位置跟蹤依然快速穩定,說明系統慣量變化不影響該控制器的性能。
為了驗證優化后的ADRC系統在加載后的抗干擾性,其他條件完全相同的情況下,仿真對比了階躍信號下PID和ADRC控制器在t=0.3 s加載0.2 N·m,t=0.5 s卸載,結果如圖7所示。

圖7 PID與ADRC控制系統抗干擾性能對比Fig.7 Comparison of anti-jamming performance between PID and ADRC
由圖7可得:PID控制與ADRC控制相比,到達穩定值的時間快了0.03 s,加載后的調節時間也稍快于ADRC控制,但是不論起動、加載還是卸載后的跟蹤曲線都有很大的超調,不能滿足跟蹤精度要求高的系統。而ADRC控制系統不僅跟蹤快速,且沒有超調。
上述仿真驗證的是輸入信號為常值時控制系統跟隨性,圖8反映輸入為正弦變化的信號時系統的連續跟隨情況,在t=3 s時加入一個0.2 sint的擾動,觀察ADRC和PID控制系統的性能,圖9是實際擾動與觀測擾動曲線。
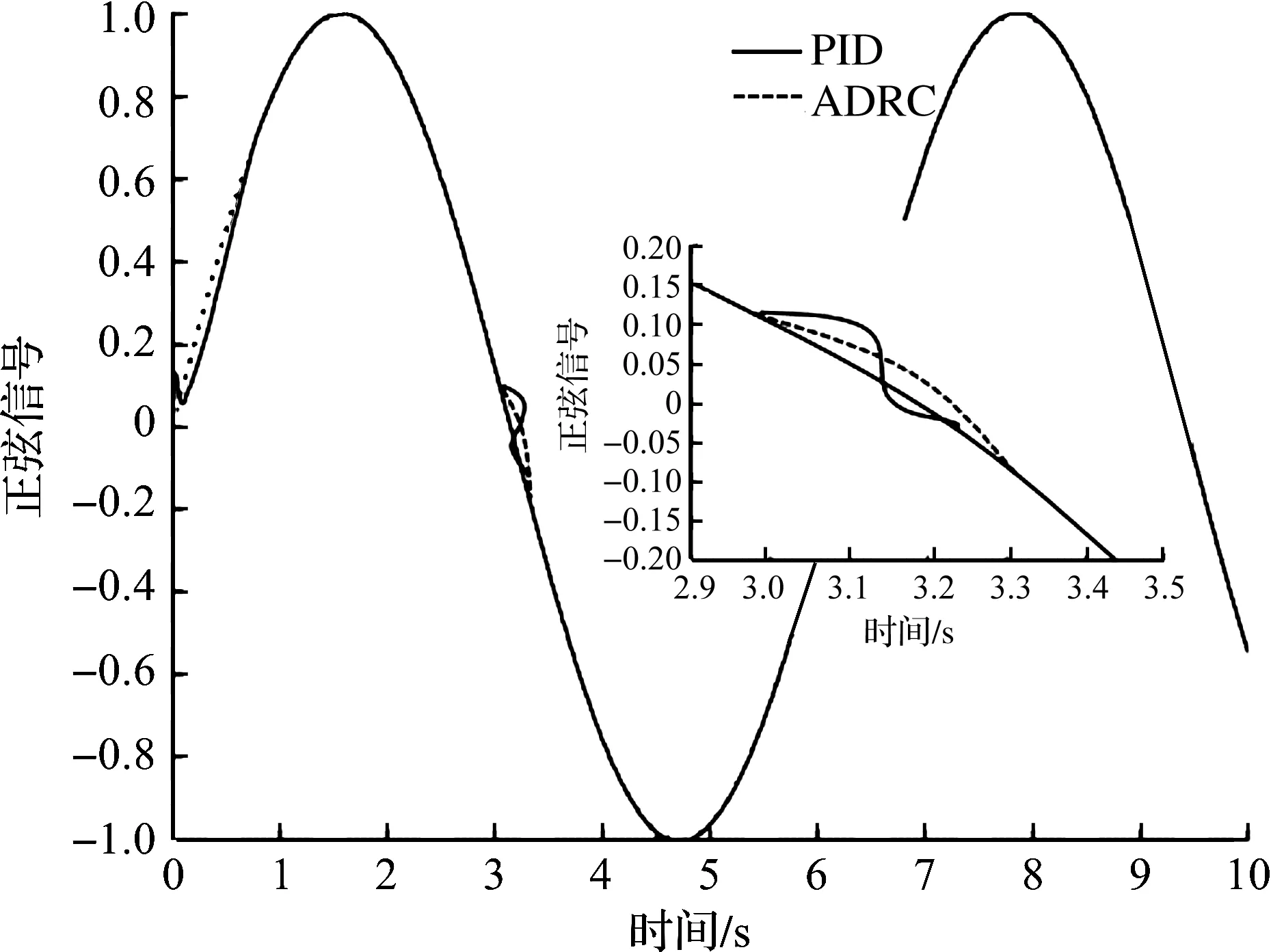
圖8 正弦信號下PID與ADRC控制系統抗干擾性能對比Fig.8 Comparison of anti-interference performance between PID and ADRC control system under sinusoidal signal
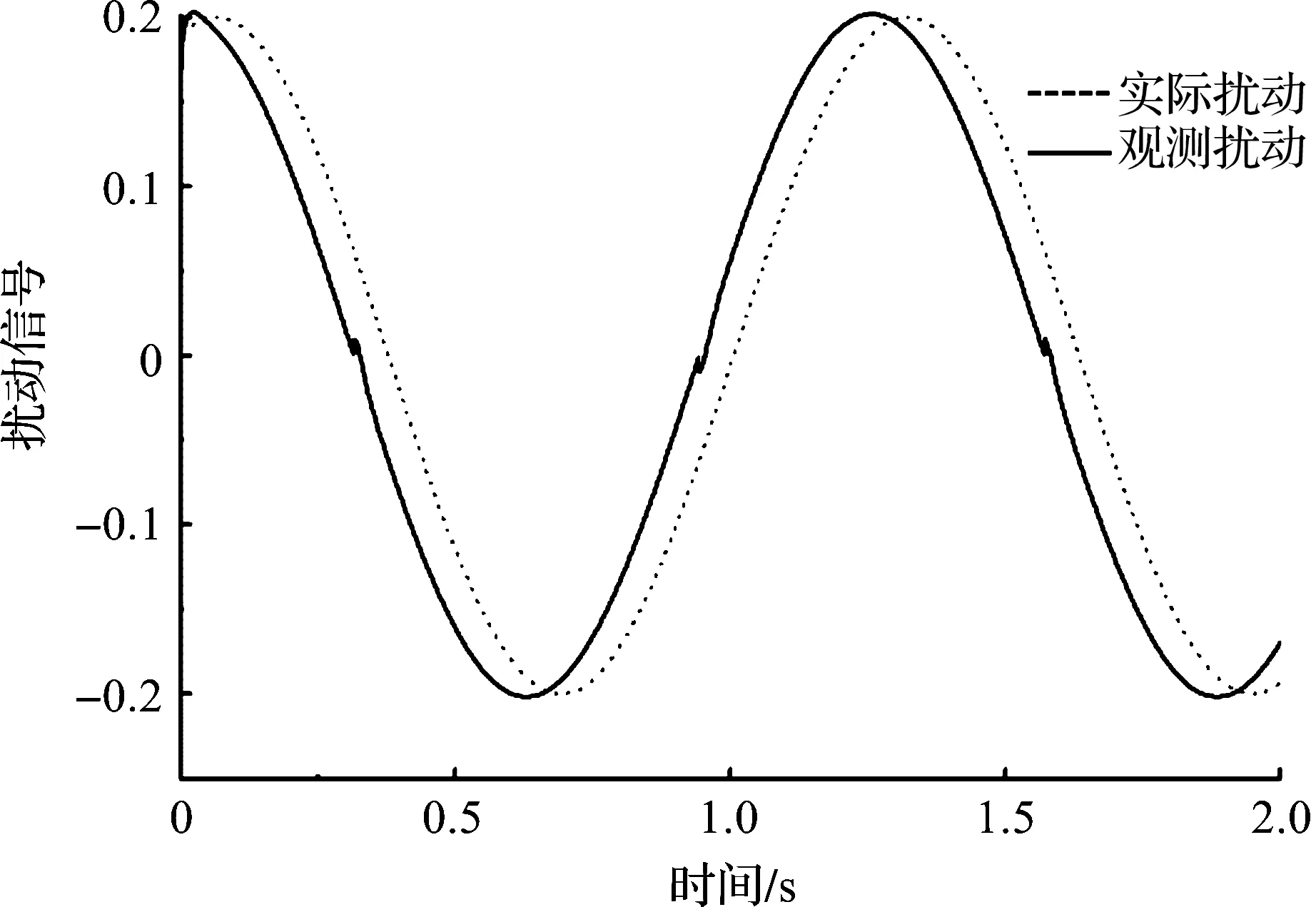
圖9 實際擾動與觀測擾動Fig.9 Actual disturbance and observation disturbance
從圖8可得:正弦信號下,起動時PID控制的穩定性低于ADRC控制,加入干擾信號后,兩者均能迅速恢復穩定跟蹤,但ADRC的跟蹤曲線比較平滑,抗干擾能力強,而PID控制的跟蹤曲線波動較大。
伺服電機控制的目標是實現電機無超調和快速響應,為了更有力驗證ADRC控制系統在負載擾動下的轉速和位置響應性能,搭建測試平臺結構如圖10所示,PMSM參數與仿真所用電機參數一致,以意法半導體公司的微控制器STM32F407ZGT6作為系統的主芯片,三相逆變器產生六路PWM波形驅動電機轉動,采用分辨率為2 048 ppr的增量式光電編碼器實現轉子位置檢測,使用測功機加載需要的負載擾動,并測出實驗所需的相關數據。系統采用id=0矢量控制,位置環和速度環采用ADRC控制器一體化控制,電流環采用PI控制器。
實驗分別作了2 個驗證:給定轉子位置為60°,360°,在t=1.5 s施加0.2 N·m的負載,分別得出PID和ADRC控制系統位置響應曲線;給定轉速為500,1 000 r/min,在t=1.5 s施加0.2 N·m的負載,得出PID和ADRC控制系統速度響應曲線。對于實驗中的數據取關鍵點進行曲線分析,如圖11,12所示。
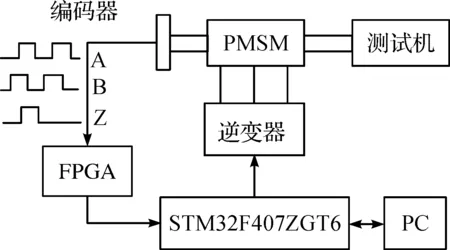
圖10 測試平臺結構圖Fig.10 Structure diagram of Test platform
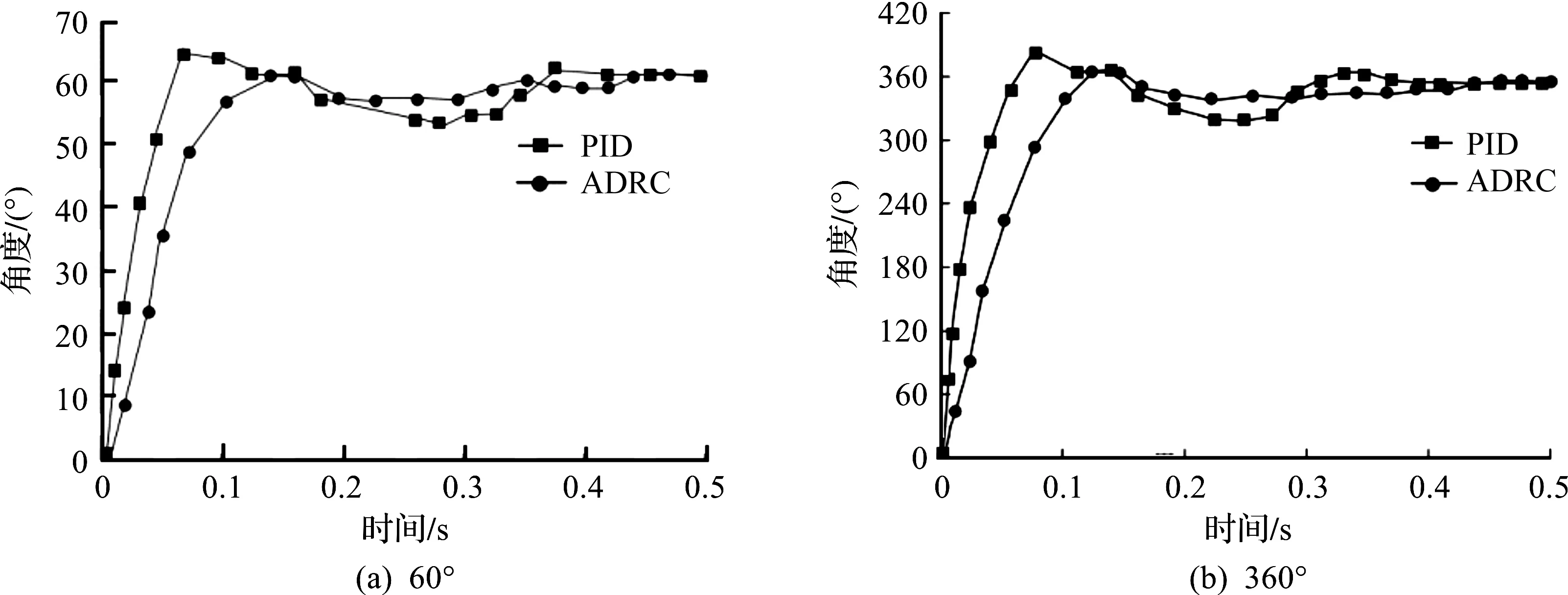
圖11 位置響應曲線Fig.11 Response curve of position
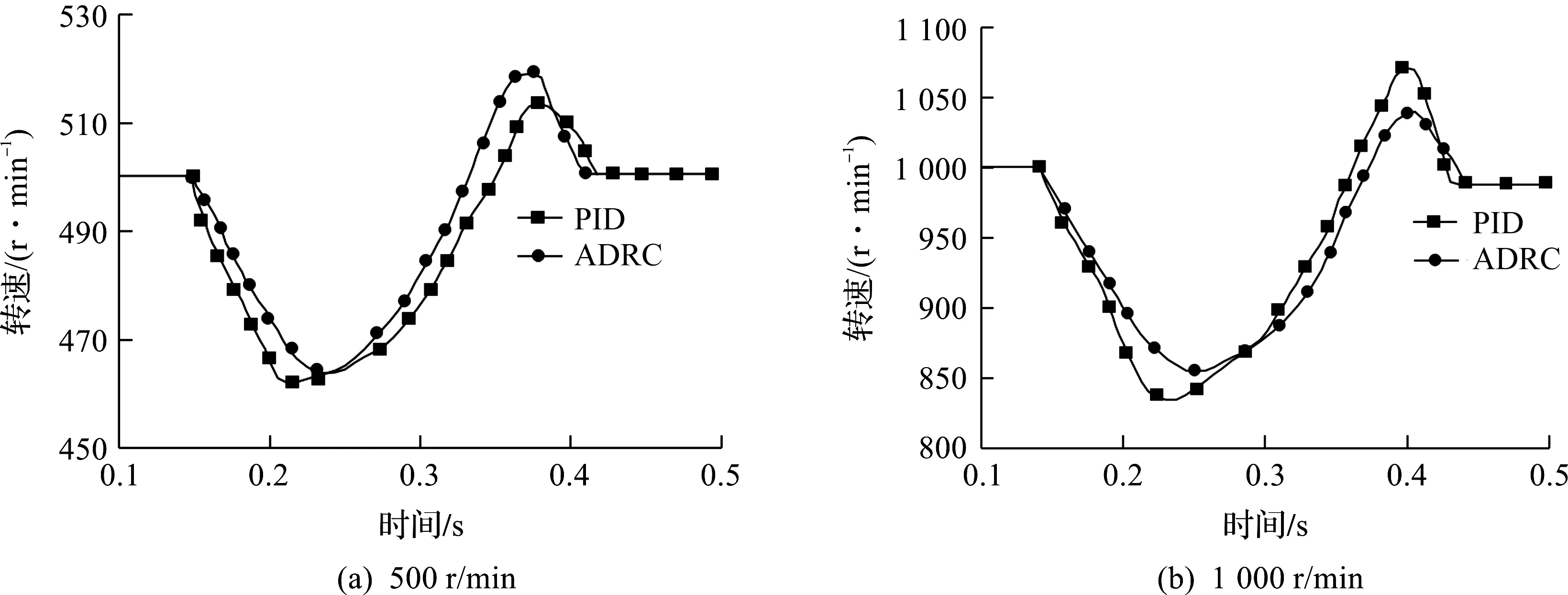
圖12 速度響應曲線Fig.12 Response curve of speed
由圖11可得:PID與ADRC均能實現快速響應,給定位置為60°時,PID控制和ADRC控制系統分別在0.419,0.426 s恢復穩定值;位置為360°時,PID和ADRC控制系統分別在0.423,0.431 s恢復穩定,但是PID控制存在很大的超調,曲線上下浮動大,ADRC控制系統比較穩定。
系統速度響應曲線如圖12所示,在加入負載擾動后,PID與ADRC均能快速穩定,給定速度為500 r/min時,PID和ADRC控制系統分別在0.396,0.401 s恢復穩定;給定速度為1 000 r/min時分別在0.417,0.421 s到達給定值。而PID控制曲線波動比ADRC控制曲線波動大,證明ADRC控制系統控制精度更高,這和仿真結果是一致的。
5 結 論
在PMSM控制系統中,將矢量控制與自抗擾控制原理相結合,設計了永磁同步電機ADRC位置控制器,并用遺傳算法解決了自抗擾控制器部分參數靠經驗整定的不足。通過仿真對變參數和加負載擾動情況下的系統穩定性進行分析,仿真表明:優化后的ADRC控制系統動靜態性能良好,抗干擾能力強、魯棒性高,可實現無超調快速響應,控制精度高,實驗分析結果進一步說明ADRC抗負載擾動能力強,穩定性高。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
