MEMS偏航角速度傳感器在旋轉導彈穩定回路中的應用
2019-06-12 09:31:00于家福邢朝洋朱政強
導航與控制 2019年2期
關鍵詞:信號
于家福,邢朝洋,朱政強,孫 鵬
(1.海軍裝備部駐北京地區第七軍事代表室,北京100039;2.北京航天控制儀器研究所,北京100039)
0 引言
偏航角速度傳感器主要被用于旋轉導彈單通道控制系統的穩定回路(阻尼回路),以增加導彈的等效阻尼系數,輸出與彈體偏航軸角速度成比例的正弦波信號。當導彈接近目標時,彈體抖動加大,若無角速度傳感器構成的阻尼回路,將導致脫靶量增加。阻尼回路的關鍵在于偏航角速度傳感器[1-4]。
目前,旋轉導彈穩定回路采用液浮陀螺或無驅動偏航角速度傳感器[5-7]。其中,無驅動偏航角速度傳感器是一種依靠彈體自旋轉而獲得轉子(質量)角動量(H)的陀螺。從陀螺的原理可知,陀螺力矩=H×Ω=J×ω×Ω。由于彈體自旋轉,滾動軸旋轉角速率ω是不斷變化的,因而導致陀螺力矩隨彈體自旋而產生波動,進而致使偏航角速度的幅值發生波動,正交耦合誤差加大,相位也隨之產生波動。
為了滿足武器系統結構簡單、質量小、成本低的發展趨勢,旋轉導彈穩定回路對MEMS偏航角速度傳感器提出了明確需求。
1 偏航角速度傳感器的工作原理
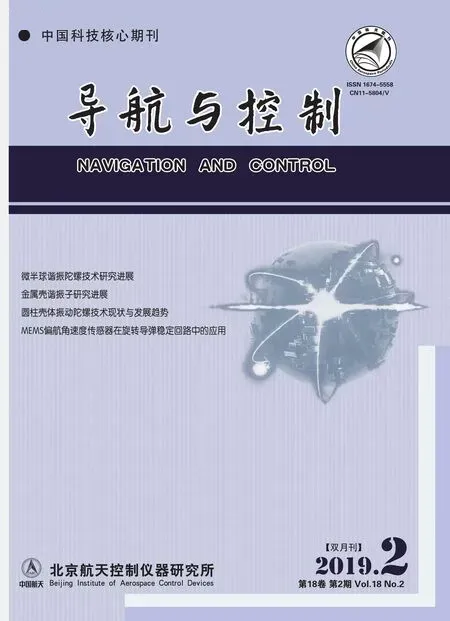
如圖1和圖2所示,穩定回路中的偏航角速度傳感器用于測量導彈繞彈體坐標系的橫向角速度,并將其作為反饋信號輸入到系統中,以改善導彈的阻尼特性。
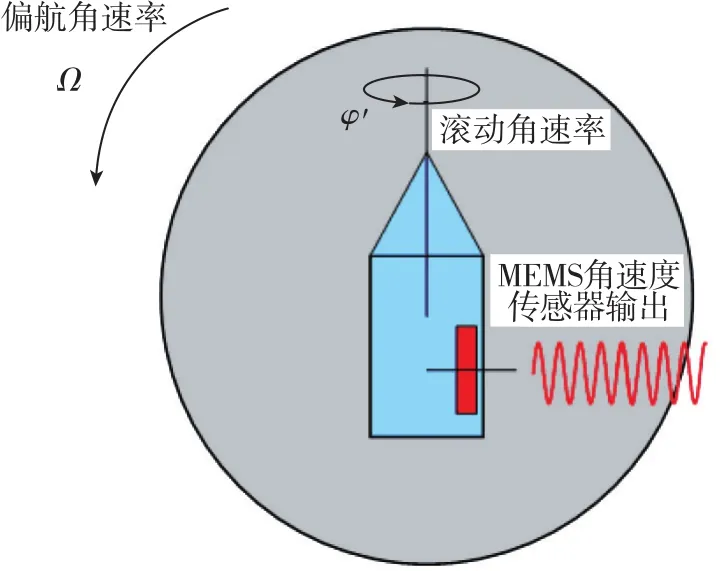
圖1 MEMS偏航角速度傳感器的工作原理示意圖Fig.1 Working principle of MEMS yaw rate sensor
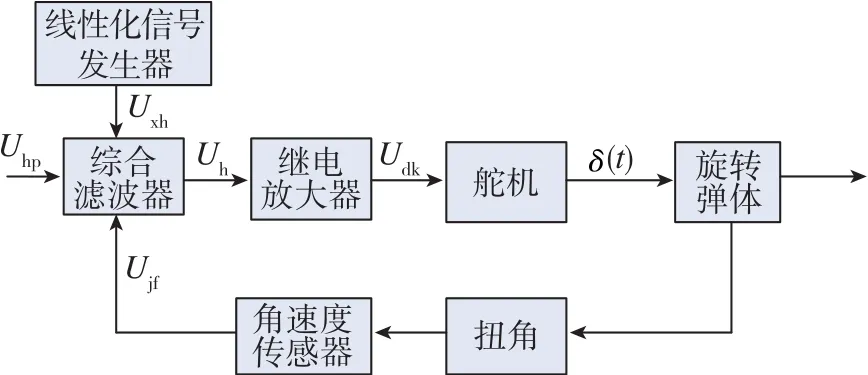
圖2 穩定回路的結構框圖Fig.2 Diagram of the stabilization loop
旋轉導彈單通道控制系統有自身的特點,控制信息要求以幅值、相位、頻率來進行描述。輸入信號頻率與導彈自旋頻率需嚴格一致,信號在傳遞過程中不允許產生相位畸變。因此,對穩定回路中角速度傳感器的輸出要求如圖3所示。
當彈體滾動軸方向以˙φ的角速度旋轉,偏航軸方向又有角速度Ω輸入時,偏航角速度傳感器將感受到周期性變化的哥氏力,其輸出可表示為

式中,Vout為角速度傳感器輸出,單位為V;K0為角速度傳感器零位,單位為V;K1為角速度傳感器的比例系數, 單位為 V/[(°)/s];Ω為偏航軸向輸入角速度,單位為(°)/s;˙φ為滾動軸向彈旋頻率,單位為Hz;φ為角速度傳感器輸出初始相位,單位為rad。
圖3 MEMS偏航角速度傳感器的期望輸出Fig.3 Expected output of MEMS yaw rate sensor
2 偏航角速度傳感器的設計
2.1 偏航角速度傳感器的總體設計方案
MEMS偏航角速度傳感器用于敏感彈體偏航/俯仰軸向的角速度信號,在設計時采用了敏感軸向在平面內的振動輪式結構MEMS陀螺的方案,如圖4所示。
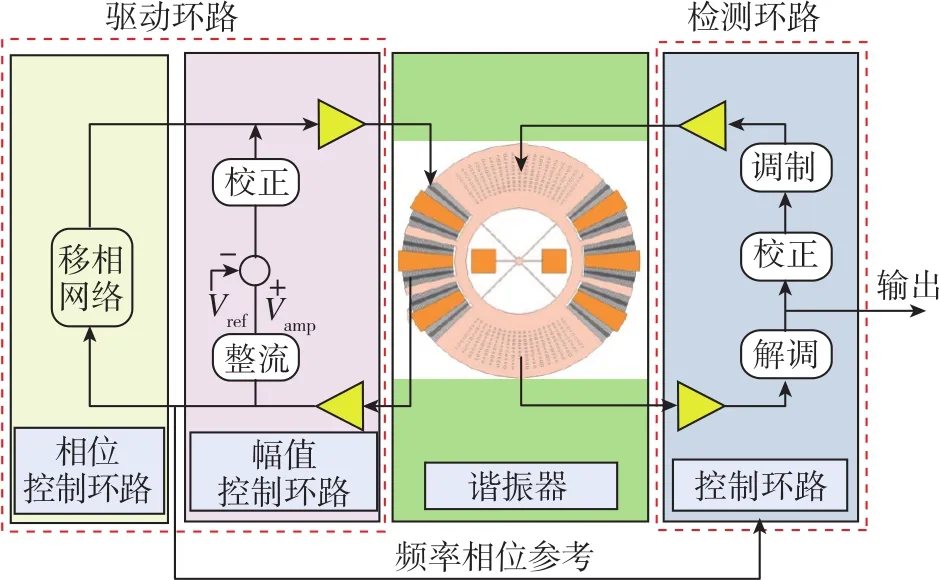
圖4 MEMS偏航角速度傳感器總體方案Fig.4 Whole technical scheme of MEMS yaw rate sensor
MEMS陀螺的驅動環路采用了幅值閉環和相位閉環的雙閉環控制回路設計,檢測環路采用了開環檢測的方案,簡化了MEMS陀螺檢測環路的電路設計。
檢測環路還包括了幅值調節、相位調節等環節,以實現在滾動軸高速旋轉條件下的偏航軸向角速度測量。
2.2 偏航角速度傳感器的數學模型
建立偏航角速度傳感器的數學模型,采用頻域分析法進行分析,分析結果如圖5所示。可以看出,在6Hz~13Hz小范圍內,幅值和相位特性工作在平坦段,滿足使用要求。
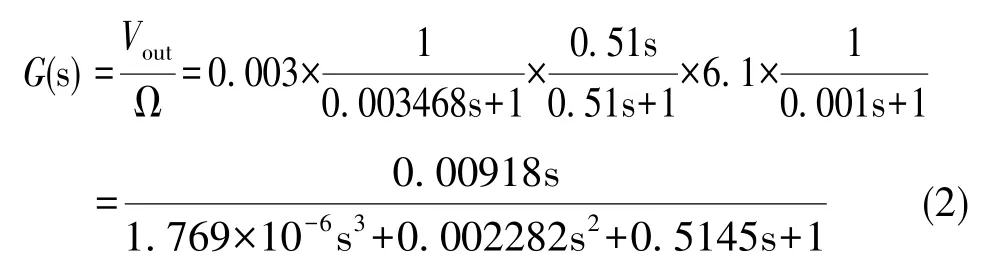
其中,Vout為偏航角速度傳感器輸出,單位為V;Ω為輸入角速率, 單位為(°)/s。
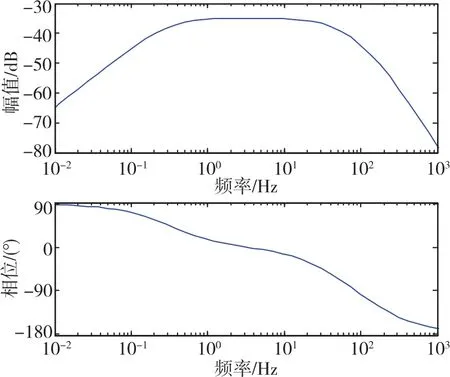
圖5 MEMS偏航角速度傳感器的頻率特性曲線Fig.5 Frequency characteristic curve of MEMS yaw rate sensor
2.3 偏航角速度傳感器的測試數據
將MEMS偏航角速度傳感器安裝在雙軸轉臺上進行性能測試。在試驗時,滾動軸方向設定3600(°)/s(10Hz)的角速率, 偏航軸方向分別設定30(°)/s、 60(°)/s、 90(°)/s、 120(°)/s、 180(°)/s, 記錄下MEMS偏航角速度傳感器的輸出,如圖6所示。
在試驗時,滾動軸方向分別設定為2160(°)/s、2520(°)/s、 2880 (°)/s、 3240 (°)/s、 3600 (°)/s、3960(°)/s、 4320(°)/s、 4680(°)/s(6Hz~13Hz)的角速率,偏航軸方向設定50(°)/s,記錄下MEMS角速度傳感器的輸出幅值和相位隨彈旋頻率的變化,如圖7和圖8所示。
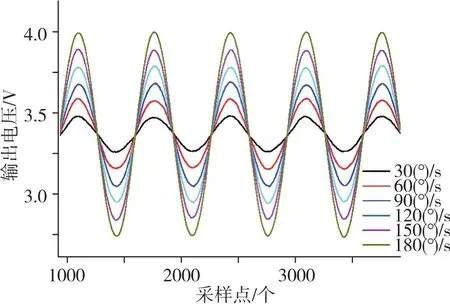
圖6 MEMS偏航角速度傳感器雙軸轉臺性能測試Fig.6 Performance test of MEMS yaw rate sensor on two-axis rate turn table
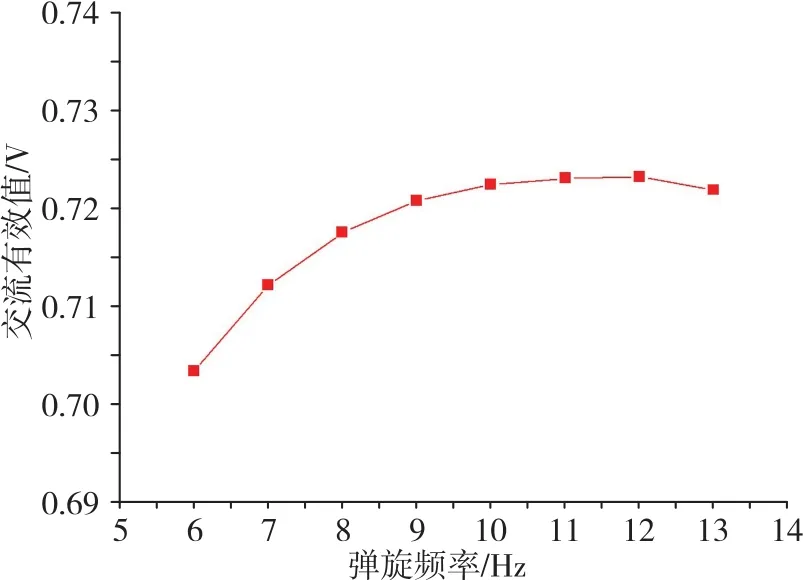
圖7 MEMS偏航角速度傳感器的輸出幅值隨彈旋頻率的變化Fig.7 Variety of output amplitude of MEMS yaw rate sensor along with rolling rate
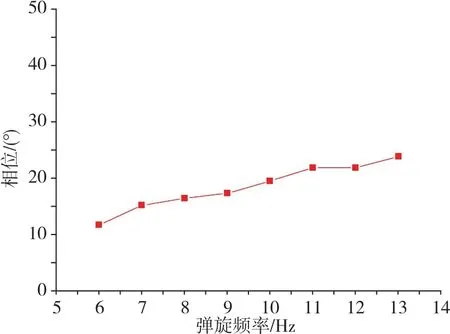
圖8 MEMS偏航角速度傳感器的相位滯后隨彈旋頻率的變化Fig.8 Variety of phase delay of MEMS yaw rate sensor along with rolling rate
3 MEMS偏航角速度傳感器的應用研究
3.1 正交耦合誤差分析
MEMS偏航角速度傳感器用于彈體偏航(俯仰)軸向角速率的測量,非敏感軸向隨彈體以較高的滾動角速率高速旋轉。由于MEMS偏航角速度傳感器的安裝誤差,在實際工作中,滾動軸方向的大角速率將會被耦合到MEMS偏航角速度傳感器的敏感軸方向,即出現滾動軸向與偏航軸向或俯仰軸向間的正交耦合誤差,如圖9所示。
這樣的日子大約持續了一周左右,李小樹才打來一個電話,我接通電話的時候,話筒里滿是“沙沙沙”的噪音,他的聲音就夾雜在其中時斷時續地傳來。我隱隱約約聽到他在電話里說自己已經到達柳江古鎮了。我剛“哦”了一聲,就看到一輛大紅色的藍博基尼跑車正緩緩地駛進李小樹旁邊的那幢小洋樓。我站在陽臺上一邊漫不經心地聽著李小樹的電話,一邊瞇著眼睛打量著從小轎車里下來的那女人。
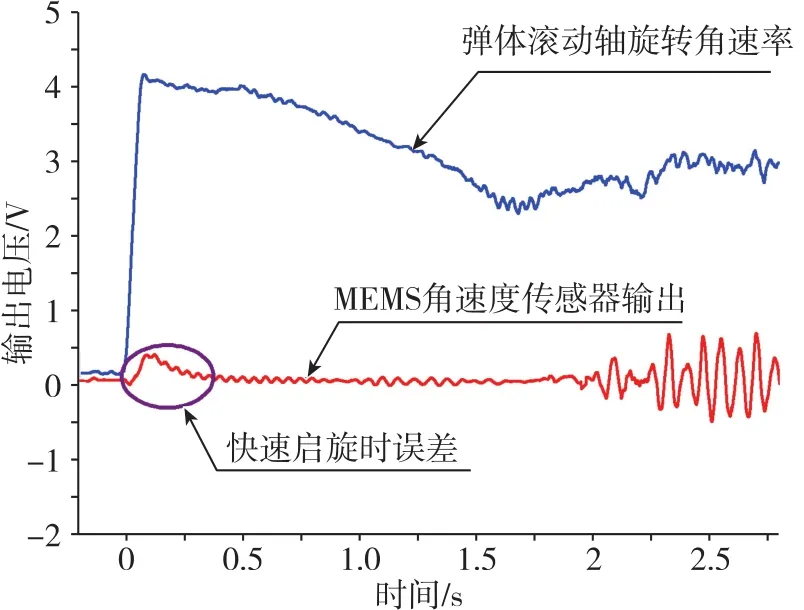
圖9 MEMS偏航角速度傳感器的正交耦合誤差Fig.9 Orthogonal coupling error of MEMS yaw rate sensor
從角速度傳感器的工作機理出發,通過大量試驗驗證,獲得的解決措施如下:
1)采用專用焊接設備和工裝,保證MEMS陀螺與電路板的裝配精度,以及電路板與殼體的裝配精度;
2)在電路設計中采取措施抑制正交耦合誤差。
3.2 力學環境適應性設計
MEMS偏航角速度傳感器安裝在駕駛儀電路中,在飛行過程中面臨著發射沖擊、發動機點火沖擊、飛行振動等復雜的力學環境。旋轉導彈穩定回路中的冷氣乒乓舵機始終以35Hz左右的頻率工作,其直接作用在MEMS偏航角速度傳感器安裝位置處,所面臨的力學環境更加惡劣。彈體坐標系及舵面位置關系如圖10所示。
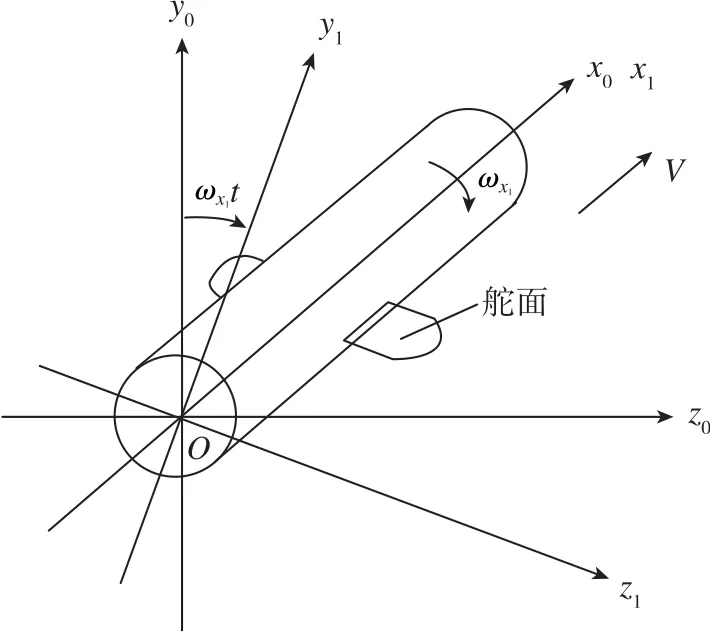
圖10 彈體坐標系及舵面Fig.10 Missile reference frame and the rudder surface
為了提高MEMS偏航角速度傳感器的測量精度,滿足任務使用要求,在設計時應考慮以下幾點:
1)提高MEMS偏航角速度傳感器敏感結構的結構剛度,減小外部力學環境引入的干擾誤差;
2)避免MEMS偏航角速度傳感器的敏感軸向與舵機轉動方向一致,減少舵機轉動引入的角振動被輸入到MEMS偏航角速度傳感器;
3)優化MEMS偏航角速度傳感器信號,調整電路設計,減小儀表振動環境下的輸出噪聲;
通過設計改進,以及針對性的環境試驗考核驗證,MEMS偏航角速度傳感器的力學環境適應性明顯提高,在舵偏打力學環境條件下波形畸變被控制在了5%以內。改進前后MEMS偏航角速度傳感器在舵偏打條件下的輸出對比如圖11所示。
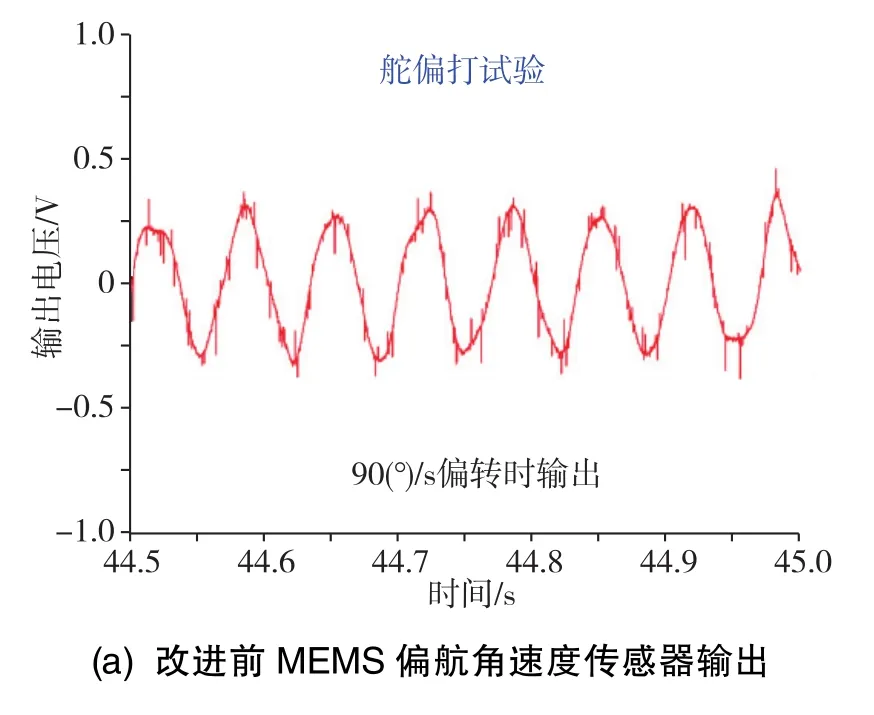
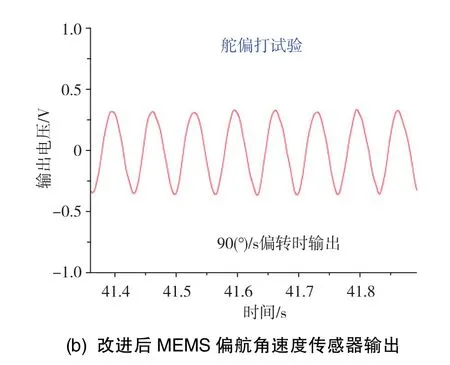
圖11 MEMS偏航角速度傳感器改進前后的輸出對比圖Fig.11 Outputs of MEMS yaw rate sensor before and after improvement
3.3 正弦性畸變分析
MEMS偏航角速度傳感器輸出的正弦波信號是否畸變對于控制系統而言至關重要,本文提出了一種電壓波形正弦性畸變率(Voltage Harmonic Distortion,VHD)方法,對MEMS偏航角速度傳感器輸出的正弦信號進行了分析[8]。
輸出波形和正弦波形的偏差程度用VHD表示
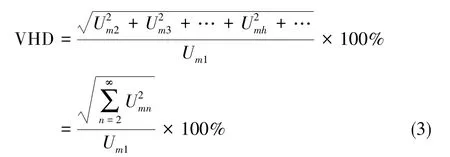
其中,Um1為有用信號,Um2~Umn為其他高次諧波。
對諧波進行快速 Fourier變換(FFT)或離散Fourier變換(DFT)。為提高性能指標測量準確度和系統抗干擾能力,采用基于諧波分析和周期跟蹤技術的方法測量 VHD[9]。
設u(t)為被測電壓信號,經過信號調理電路處理后,最高諧波次數為L,展開為Fourier級數
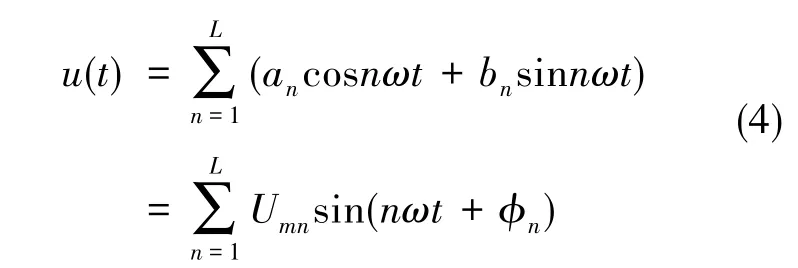
式中,Umn為u(t)的n次諧波的幅值,φn為u(t)的n次諧波的初相位,ω=2π/T為u(t)的周期。
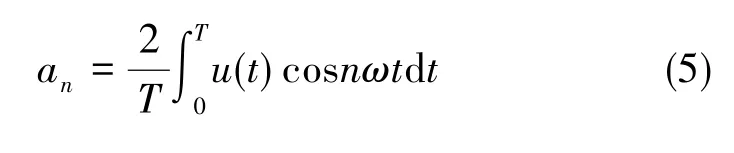

式中,n=1, 2, 3, …,L。
設一個基波周期內采樣N次,采樣頻率為fs。采用DFT算法,對式(5)和式(6)離散化,可以得到n次諧波的實部和虛部,分別為
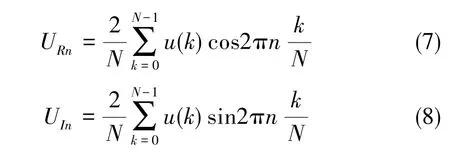
采用式(7)和式(8),可以求出基波和各次諧波的實部和虛部,這樣可以計算其相應的電壓幅值,并按式(3)求出 VHD。
4 某型號高速旋轉彈飛行試驗驗證
在某高速旋轉彈任務牽引下,MEMS偏航角速度傳感器參加了飛行試驗。圖12為某型號飛行試驗中MEMS偏航角速度傳感器的遙測輸出。可以看出,MEMS角速度輸出與彈旋頻率同頻率的正弦波信號,達到了設計預期。
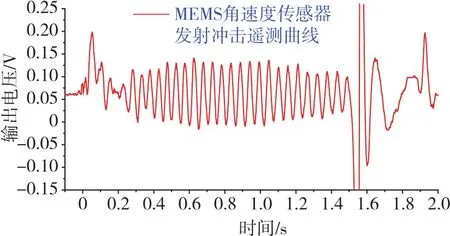
圖12 MEMS偏航角速度傳感器的遙測輸出Fig.12 Output of MEMS yaw rate sensor
5 結論
針對旋轉導彈穩定回路對MEMS偏航角速度傳感器的需求,本文提出了一種全新的MEMS偏航角速度傳感器技術方案,實現了穩定回路的閉環控制。通過MEMS偏航角速度傳感器的方案設計,以及地面環境適應性考核,提高了MEMS偏航角速度傳感器的測量精度,使其能夠滿足旋轉導彈偏航角速度的測量要求。如何進一步抑制MEMS偏航角速度傳感器的輸出信號噪聲,是下一步工作的重點。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06