基于領(lǐng)導(dǎo)跟隨一致性理論的隊形保持策略*
2019-06-13 10:57:00胡朝暉王驍飛
火力與指揮控制 2019年5期
關(guān)鍵詞:一致性結(jié)構(gòu)
胡朝暉,李 聰,王 勇,周 歡,王驍飛
(1.西京學(xué)院機(jī)械工程學(xué)院,西安 710123;2.空軍工程大學(xué)航空工程學(xué)院,西安 710038)
0 引言
多無人機(jī)編隊作戰(zhàn)可提高無人機(jī)的突防能力、電子對抗能力、對目標(biāo)搜索能力和識別能力,以及攻擊效能等,提高任務(wù)完成的整體效率,必將成為未來空戰(zhàn)的主要形式之一[1]。隊形保持,即多無人機(jī)協(xié)同執(zhí)行作戰(zhàn)過程中因特定任務(wù)需求或減少油耗等原因,需在飛行過程中保持特定的編隊隊形。現(xiàn)階段比較常用的隊形保持控制策略主要有:長機(jī)-僚機(jī)法,基于行為法、虛擬結(jié)構(gòu)法以及人工勢場法等[2]。根據(jù)文獻(xiàn)[3]的思路可知,若將一致性控制協(xié)議中的狀態(tài)值分別賦予不同含義的物理量,則可將上述常用的隊形保持控制策略統(tǒng)一于一致性理論的框架之內(nèi)。
現(xiàn)階段關(guān)于一致性理論的研究成果頗豐,但大多數(shù)文獻(xiàn)所提出的一致性控制協(xié)議因限制條件的引入,而阻礙了理論成果在工程實踐過程中的推廣和應(yīng)用。文獻(xiàn)[4]以簡化的智能體模型為基礎(chǔ),提出了二階時延一致性控制協(xié)議,然而實際作戰(zhàn)中無人機(jī)的行為不僅受到編隊內(nèi)其他無人機(jī)的影響,而且也受到其固有的非線性動力學(xué)特性的影響,本文則引入了描述無人機(jī)非線性動力學(xué)特性的方程,以構(gòu)造二階非線性模型,并以此為基礎(chǔ)對一致性控制協(xié)議進(jìn)行設(shè)計和討論;文獻(xiàn)[5]以固定的通信拓?fù)浣Y(jié)構(gòu)描述智能體之間的通信情況,而未深入研究實際環(huán)境中必然存在的通信延遲,以及通信拓?fù)浣Y(jié)構(gòu)變化等情況。多無人機(jī)協(xié)同作戰(zhàn)過程中,編隊內(nèi)無人機(jī)因為任務(wù)需求、通信鏈路故障或障礙物等因素的影響,通信拓?fù)浣Y(jié)構(gòu)必然會隨時間而發(fā)生變化,為了解決這種問題,本文對切換拓?fù)浣Y(jié)構(gòu)下的一致性控制協(xié)議進(jìn)行了討論研究。領(lǐng)航跟隨結(jié)構(gòu)是生物系統(tǒng)中常見的節(jié)能機(jī)制,并且其能夠加強(qiáng)群體的通信和導(dǎo)向[6],在描述編隊問題時,常將一致性控制協(xié)議和領(lǐng)航跟隨結(jié)構(gòu)相結(jié)合,編隊作戰(zhàn)中只需對有限的領(lǐng)航者施加影響,便可實現(xiàn)整個編隊達(dá)到預(yù)期狀態(tài)。領(lǐng)航者為一特殊個體,其運動獨立于編隊內(nèi)其他無人機(jī),而其他無人機(jī)則盡量跟隨其狀態(tài),此種問題稱為領(lǐng)導(dǎo)跟隨一致性問題。領(lǐng)導(dǎo)跟隨一致性問題研究中主要分為:具有真實領(lǐng)導(dǎo)者的一致性問題和具有虛擬領(lǐng)導(dǎo)者的一致性問題。相比于編隊內(nèi)存在的真實領(lǐng)導(dǎo)者,虛擬領(lǐng)航者的引入,不僅可降低和減少任務(wù)分配的難度和工作量,產(chǎn)生較高的控制精度,而且在多無人機(jī)協(xié)同作戰(zhàn)中可防止因打掉關(guān)鍵節(jié)點——編隊中的真實領(lǐng)航者而導(dǎo)致整個編隊作戰(zhàn)失敗的情況,因此,采用虛擬領(lǐng)航者的領(lǐng)導(dǎo)跟隨一致性控制協(xié)議更加符合實戰(zhàn)需求。
本文以領(lǐng)導(dǎo)跟隨一致性理論為頂層控制策略,以無人機(jī)編隊保持為應(yīng)用對象,在分布式結(jié)構(gòu)指導(dǎo)下,形成一個完整的多無人機(jī)編隊隊形保持的體系結(jié)構(gòu)。為了推動一致性控制協(xié)議在工程實踐中的應(yīng)用,針對隊形保持問題,提出了二階非線性切換拓?fù)浣Y(jié)構(gòu)下的領(lǐng)導(dǎo)跟隨一致性控制協(xié)議,并利用構(gòu)造的利亞普諾夫函數(shù)和線性矩陣不等式,給出了判據(jù)及相應(yīng)的穩(wěn)定性證明。仿真結(jié)果驗證了理論分析的正確性以及隊形保持控制協(xié)議的有效性。
1 預(yù)備知識
1.1 圖論
多無人機(jī)編隊中無人機(jī)之間的通信情況可以采用權(quán)重有向圖進(jìn)行描述。令為一權(quán)重有向圖,其中為有向圖頂點的集合;為有向圖的邊,表明第i架無人機(jī)接收來自第j架無人機(jī)的信息;為鄰接矩陣,且對于所有的,。定義為與第i架無人機(jī)相鄰的所有無人機(jī)的集合。
1.2 引理
本部分引入后文需要使用的引理。
引理1[7]
令α∈R,A,B,C,D 為具有相同維度的矩陣,則Kronecker積具有以下性質(zhì):

引理2[8]
定義線性矩陣不等式(linear matrix inequality)為
2 多無人機(jī)編隊分布式控制系統(tǒng)結(jié)構(gòu)
多無人機(jī)編隊飛行過程中為了保持一定的幾何隊形,無人機(jī)之間必然存在信息的交互。現(xiàn)階段多無人機(jī)編隊中的信息交互方式主要有集中式、分布式和分散式3種,各有利弊[9]。多無人機(jī)在飛行過程可能會遇到任務(wù)變更、無人機(jī)故障,以及部分成員被敵方擊落等突發(fā)情況,從而需要一種擴(kuò)充性和容錯性較好,可將以上突發(fā)情況帶來的影響限制在局部范圍內(nèi)的一種信息交互方式,分布式信息交互方式因構(gòu)造簡單可靠,信息量小而較易避免信息沖突,以及結(jié)構(gòu)在工程上便于實現(xiàn)和維護(hù)的特性而成為首選。
分布式控制信息交互是指編隊中的每架無人機(jī)需將自身的位置、速度和姿態(tài)等信息與其相鄰的無人機(jī)進(jìn)行交互。結(jié)合后文設(shè)計的一致性控制協(xié)議提出多無人機(jī)分布式控制系統(tǒng)結(jié)構(gòu)如下頁圖1所示。
由圖1可知,編隊內(nèi)無人機(jī)將自身狀態(tài)信息傳遞給一致性管理器,一致性管理器則借助一致性控制協(xié)議,產(chǎn)生使多無人機(jī)編隊保持預(yù)期幾何編隊隊形的各個無人機(jī)每時每刻需要達(dá)到的物理量的參考值。

圖1 多無人機(jī)分布式控制系統(tǒng)結(jié)構(gòu)示意圖
3 隊形保持一致性控制協(xié)議的設(shè)計與分析
3.1 問題描述
考慮包含N架無人機(jī)的編隊,第i架無人機(jī)的二階非線性動力學(xué)方程為:

多無人機(jī)編隊中虛擬領(lǐng)航者的動力學(xué)方程可描述為:
對于編隊中處于任意初始狀態(tài)的無人機(jī),如果滿足式(3),則稱多無人機(jī)保持了期望的幾何編隊隊形。

其中,x*為隊形向量,表示第i架無人機(jī)為了實現(xiàn)預(yù)期編隊隊形,而需和虛擬領(lǐng)導(dǎo)者之間保持的相對間隔距離。當(dāng)x*=0時即為普通的一致性控制協(xié)議。
為了獲得后期推導(dǎo)的方便,引入假設(shè)如下:

3.2 切換拓?fù)浣Y(jié)構(gòu)下的領(lǐng)導(dǎo)跟隨一致性控制協(xié)議
為了實現(xiàn)多無人機(jī)編隊隊形保持,提出應(yīng)用于編隊保持過程中的領(lǐng)導(dǎo)跟隨一致性控制協(xié)議如下:
將式(5)代入式(1)可得閉環(huán)系統(tǒng)為



利用Kronecker積可將式(7)寫成矩陣的形式:
定理1:在式(4)成立的前提下,當(dāng)滿足如下條件時,多無人機(jī)編隊系統(tǒng)式(1)可實現(xiàn)預(yù)期的編隊隊形:
證明:式(9)和式(10)以及引理 2可得

針對式(8)選取利亞普諾夫函數(shù)為:

由式(12)可得,利亞普諾夫函數(shù)式(13)滿足V(t)≥0,而且當(dāng)且僅當(dāng)時 V(t)=0。
對 V(t)結(jié)合式(8)求導(dǎo)可得式(14),如下所示:

另外根據(jù)假設(shè)式(4)可以得到:
由式(14)和式(15)可以得到

4 仿真
4.1 仿真環(huán)境設(shè)置
設(shè)置編隊內(nèi)4架無人機(jī)的二維初始位置、二維初始速度和無人機(jī)性能指標(biāo),分別如下頁表1和表2所示。
假設(shè)4架無人機(jī)在執(zhí)行任務(wù)期間可能出現(xiàn)的通信拓?fù)浣Y(jié)構(gòu)如圖2所示。通信拓?fù)鋱D每隔1 s切換到下一個拓?fù)鋱D,切換順序為。權(quán)重矩陣設(shè)置如下:

表1 UAV初始狀態(tài)
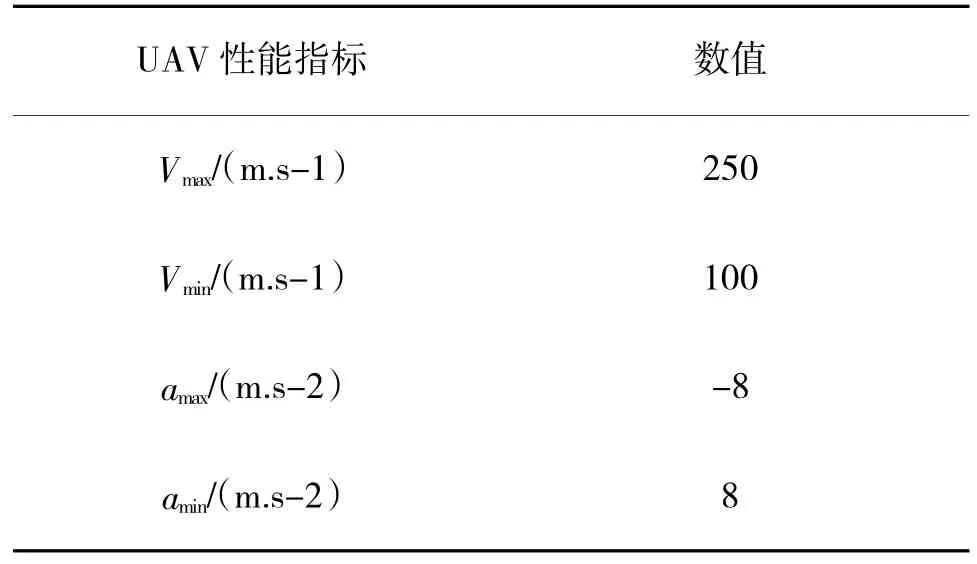
表2 UAV性能指標(biāo)


圖2 通信拓?fù)鋱D
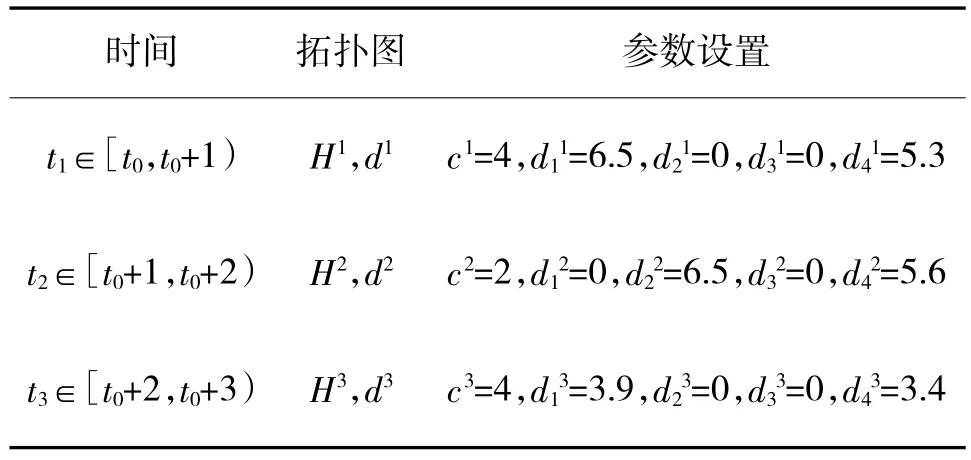
表3 不同階段仿真參數(shù)設(shè)置
4.2 仿真結(jié)果
利用式(5)所示的編隊保持一致性控制協(xié)議,引導(dǎo)4架具有動力學(xué)方程式(1)的無人機(jī)從初始狀態(tài)出發(fā)至最后形成矩形隊形。基于4.1節(jié)設(shè)置的仿真環(huán)境,最終可得4架無人機(jī)的位置和速度的變換曲線如圖3所示。
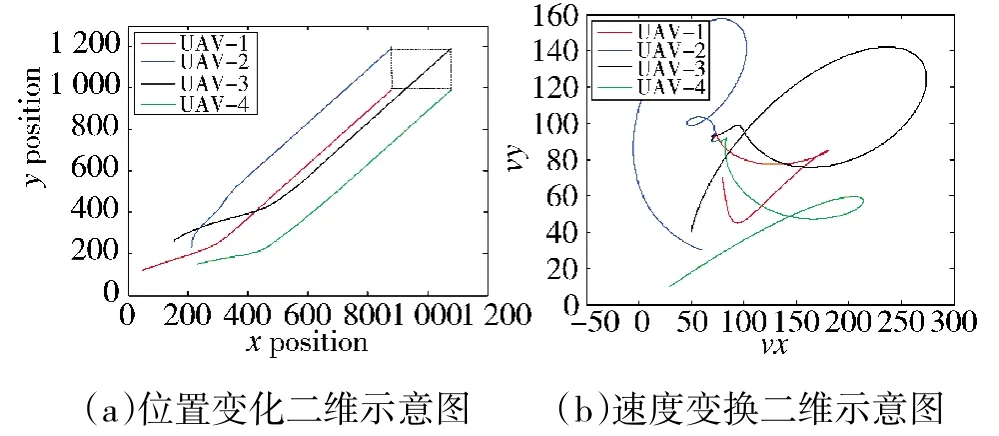
圖3 多無人機(jī)位置和速度變化示意圖
由圖3分析可知,在控制協(xié)議式(5)的作用下,4架無人機(jī)從各自的初始位置以初始速度出發(fā)經(jīng)過一段時間后,可最終收斂至虛擬領(lǐng)航者指定的二維參考速度(70,90),即 Vx=70,Vy=90,并以隊形向量決定的矩形幾何構(gòu)型編隊飛行。
5 結(jié)論
為了解決多無人機(jī)以特定幾何構(gòu)型編隊飛行的問題,本文以二階非線性模型為研究對象,提出了切換拓?fù)湎碌念I(lǐng)導(dǎo)跟隨一致性控制協(xié)議以實現(xiàn)編隊隊形保持,并給出了相應(yīng)判據(jù)和證明。仿真結(jié)果驗證了本文所提控制協(xié)議的正確性和有效性。后期主要對編隊飛行過程中存在的時延問題進(jìn)行研究,以進(jìn)一步推進(jìn)其在工程實踐中的應(yīng)用。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學(xué)問題(2021年4期)2021-11-05 07:02:34
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國公共安全(2017年11期)2017-02-06 05:28:08
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
燕山大學(xué)學(xué)報(2015年4期)2015-12-25 02:19:49