信息物理系統(tǒng)狀態(tài)估計的攻擊策略研究
2019-06-13 03:12:04王志文
自動化與儀表 2019年5期
李 唯,王志文
(1.蘭州理工大學 電氣工程與信息工程學院, 蘭州730050;2.甘肅省工業(yè)過程先進控制重點實驗室, 蘭州730050;3.蘭州理工大學 電氣與控制工程國家級實驗教學示范中心,蘭州730050)
信息物理系統(tǒng)CPS 是將計算技術(shù)、通信技術(shù)和控制技術(shù)即3C(computer,communication,control)技術(shù)深度融合到物理系統(tǒng)中,依賴計算對物理環(huán)境進行感知和控制,實現(xiàn)信息空間與物理世界的無縫結(jié)合的新一代工程系統(tǒng)[1]。CPS 與人們的生活和社會的發(fā)展有著緊密的聯(lián)系, 被廣泛應用于諸多領(lǐng)域,如交通運輸業(yè)[2]、環(huán)境監(jiān)測系統(tǒng)、醫(yī)療保健[3]等。然而,許多惡意攻擊者都將注意力轉(zhuǎn)移到了如何破壞CPS安全之上,使得系統(tǒng)安全成為CPS 面向?qū)嶋H應用的關(guān)鍵性問題,其破壞程度之大、危險系數(shù)之高常常是CPS 的設(shè)計者和管理者所始料未及的。例如,在2016年以色列電力供應系統(tǒng)遭受了重大攻擊,迫使電力供應系統(tǒng)中大量計算機離線運行[4]。
由于CPS 的安全對國民經(jīng)濟發(fā)展和人民生活的重要性,各國學者開展了針對CPS 安全相關(guān)的科學理論研究和實踐,如何保障CPS 安全已經(jīng)成為業(yè)界的前沿課題。
1 信息物理系統(tǒng)的研究現(xiàn)狀
根據(jù)已有的研究工作,CPS 遭受的攻擊可以歸類為兩大類:拒絕服務DoS(denial of service)攻擊[5]和欺騙攻擊[6]。DoS 攻擊的典型攻擊方式是干擾系統(tǒng)元件之間的通信,進而降低系統(tǒng)的性能。文獻[7]提出的事件驅(qū)動控制策略解決了控制系統(tǒng)中存在能量受限的周期性DoS 攻擊;文獻[8]針對DoS 攻擊對電力信息物理系統(tǒng)的影響,利用分布式控制架構(gòu)設(shè)計傳感器的思想,提出了網(wǎng)絡控制系統(tǒng)脆弱節(jié)點的檢驗方法和控制策略,保證系統(tǒng)能夠安全穩(wěn)定運行。
欺騙攻擊主要通過在不被發(fā)現(xiàn)的情況下修改傳輸?shù)臄?shù)據(jù)包,使系統(tǒng)失去穩(wěn)定性。若數(shù)據(jù)被惡意代理修改,那么統(tǒng)計特征就會改變,因此基于殘差的虛χ2假數(shù)據(jù)檢測器被廣泛應用于檢測這種系統(tǒng)的異常行為[9-10]。然而,攻擊者往往通過精心設(shè)計攻擊策略以避開虛假數(shù)據(jù)檢測器。例如,文獻[11]提出了欺騙攻擊成功地繞過系統(tǒng)的監(jiān)測,但并沒有通過狀態(tài)估計的條件;利用所提出的條件不僅可以評估給定的CPS 的脆弱程度,而且開發(fā)了可以抵抗欺騙攻擊的安全系統(tǒng)設(shè)計方法。文獻[12]分析了遭受虛假數(shù)據(jù)注入攻擊的后果以及能夠達到的估計誤差。在此基礎(chǔ)上,文獻[13]針對系統(tǒng)狀態(tài)估計提出一種基于數(shù)據(jù)驅(qū)動的攻擊策略。
基于這些研究的啟發(fā),在此所考慮的系統(tǒng)架構(gòu)如圖1所示。在每個時刻K,智能傳感器處理本地原始數(shù)據(jù)并將其本地更新值發(fā)送到網(wǎng)關(guān),而且僅允許網(wǎng)關(guān)在特定的時間段與遠程估計器通信。定義T∈N為網(wǎng)關(guān)和遠程估計器之間的通信時間段。每次通信以來收集的所有數(shù)據(jù)包zτ+1到zτ+T(τ=αT,α∈N)均通過無線網(wǎng)絡發(fā)送。惡意攻擊者可以攔截并擾亂數(shù)據(jù)序列,在遠程一端基于虛假數(shù)據(jù)檢測器來監(jiān)視系統(tǒng)是否有潛在的受攻擊行為。
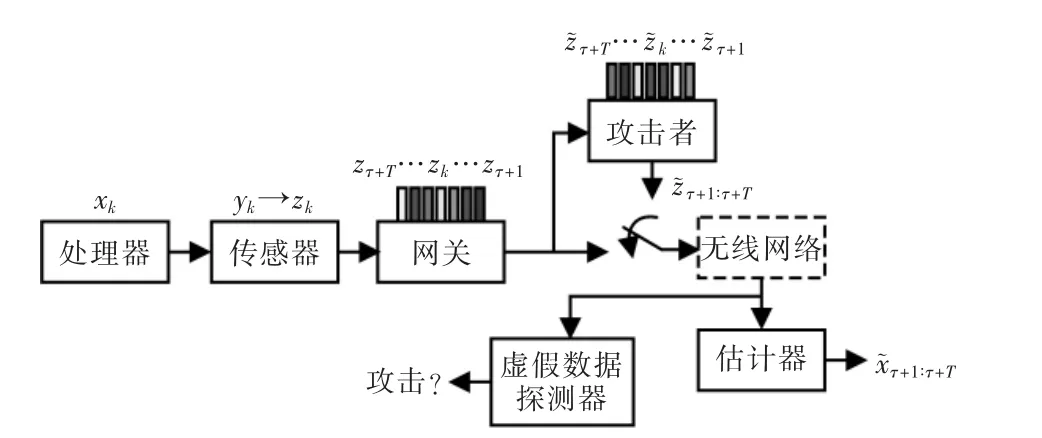
圖1 系統(tǒng)架構(gòu)Fig.1 System architecture
文中,N 和R 為正整數(shù)和實數(shù)的集合;Rn為n維歐幾里得空間;和分別為半正定矩陣、正定矩陣,當X∈時記X≥0(或X>0 當且僅當X∈);N(μ,Σ)為平均值μ 和協(xié)方差矩陣Σ 的高斯分布;′和tr(·)為矩陣的轉(zhuǎn)置和矩陣的跡;zi,j為set{zi,zi+1,…,zj},i,j∈T。
2 問題的描述
2.1 模型建立
考慮離散線性時不變LTI(linear time invariant)過程為

式中:k∈N 為時間指數(shù);xk∈Rn為過程狀態(tài)向量;yk∈Rm為 傳感 器測量 矢量;wk∈Rn和vk∈Rn分 別為具有協(xié)方差Q≥0 和R>0 的零均值高斯白噪聲。初始狀態(tài)x0是具有協(xié)方差矩陣Σ0≥0 的零均值高斯分布, 并且對于所有的k≥0 完,wk和vk全獨立。(A,C)是可觀的,(A,Q)是可控的。
在每個k 時刻,假設(shè)傳感器首先基于過程測量值執(zhí)行本地估計, 然后將更新值發(fā)送到遠程估計器。分別定義和為傳感器一側(cè)狀態(tài)xk的先驗、后驗最小均方估計誤差;和作為相應的誤差協(xié)方差,它們可以通過卡爾曼濾波器計算得到:
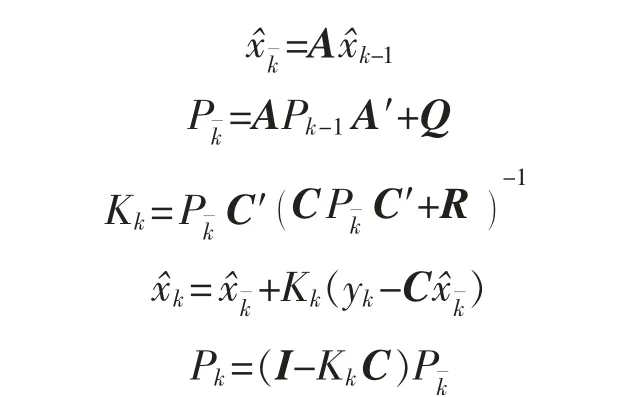
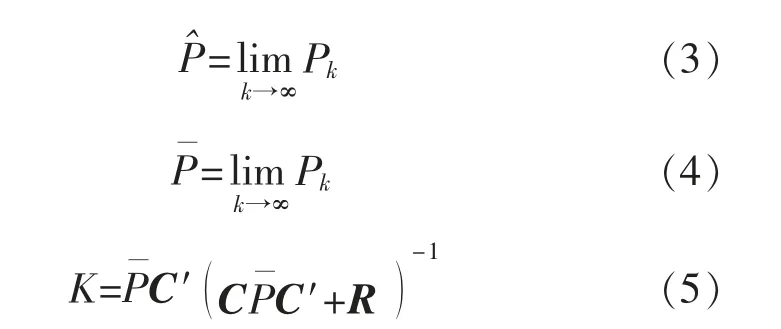
當時間趨于無窮時,卡爾曼濾波器的增益和誤差協(xié)方差,從任何初始條件開始以指數(shù)函數(shù)的方式快速收斂到穩(wěn)態(tài)值。
定義zk為k 時刻發(fā)送的更新值,即
它具有以下屬性:
2)對于?i≠j,zi和zj完全獨立。
傳感器發(fā)送的更新值是zk,而不是測量值yk或者本地狀態(tài)值。更新值zk的穩(wěn)態(tài)高斯分布有助于直接檢測異常數(shù)據(jù)。
2.2 數(shù)據(jù)包重新排序攻擊策略
根據(jù)TCP/IP 協(xié)議, 每個數(shù)據(jù)包的唯一序列號(SYN)使遠程估計器能夠區(qū)分接收數(shù)據(jù)的順序。文中提出一種新穎的數(shù)據(jù)包重新排序攻擊策略,惡意攻擊者可以使用該策略:
1)攔截所有的傳輸數(shù)據(jù)包;
2)修改TCP 標頭中的序列號。
假設(shè)網(wǎng)關(guān)接收的所有的數(shù)據(jù)包都在傳輸期間發(fā)送出去。因此,自上一次通信以來,T 時刻更新值在網(wǎng)關(guān)中被緩沖。惡意攻擊者通過劫持網(wǎng)關(guān),能夠隨意改變這些T 時刻的更新值,進而改變遠程估計器使用的更新值順序,因此,估計器使用(錯誤的)更新值zl(k)而不是zk,其中l(wèi):N→N 為定義當前時刻k 的重新排序的函數(shù)。分別定義和為遠程估計器狀態(tài)xk的先驗、和后驗最小均方估計誤差;和分別為其相應的誤差協(xié)方差。
提出的數(shù)據(jù)包重新排序攻擊策略,由于修改后創(chuàng)新值的分布仍遵循相同的高斯分布N(0,σ),所以可以繞過χ2虛假數(shù)據(jù)檢測器。
3 數(shù)據(jù)包重新排序攻擊下的性能分析
考慮到提出的數(shù)據(jù)包重新排序攻擊下的LIT 過程(1)和方程(2),在遠程估計器狀態(tài)估計更新為

式中:K 為固定增益,由式(5)給出;zl(k)為遠程估計器在時刻k 使用改變后的更新值函數(shù)。
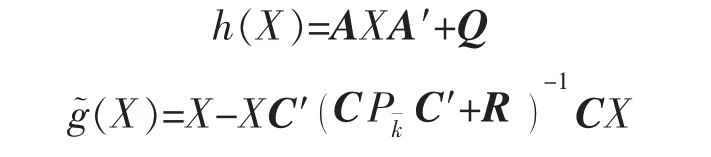
定理1在數(shù)據(jù)包重新排序攻擊下, 遠程估計器的誤差協(xié)方差的迭代遵循遞歸為

其中

而且
4 最佳攻擊策略
基于上述攻擊策略和估計誤差協(xié)方差的演變,使用終端估計誤差協(xié)方差作為目標函數(shù)來衡量系統(tǒng)性能,即
提出數(shù)據(jù)包重新排序攻擊策略并分析潛在的攻擊后果。為了得到系統(tǒng)因遭受攻擊入侵而引起的潛在后果,首先給出如下引理:
引理在時間段[τ+1,τ+T]內(nèi)(其中τ=αT,α∈N),任意改變2 個更新值序列,對于k1,k2,l(k1)和l(kk)∈[1,T],如果改變zl(k2)和zl(k1),滿足以下任意一個條件,就將會導致更大的終端估計誤差協(xié)方差:
1)A>0,k2>k1,l(k2)>l(k1);
2)?i,j,k+t∈[1,T],k+t>k,j>i,k2>k1,l(k2)>l(k1);tr[(A2T-k-j-A2T-k-t-j)(Aj-i-I)Δ]≥0
定理2在[τ+1,τ+T](其中τ=αT,α∈N)時間間隙內(nèi),已終端估計誤差協(xié)方差作為目標函數(shù),若滿足:
1)A>0;
2)?i,j,p,q∈[1,T],p>q,j>i,tr[(A2T-k-j-A2T-k-t-j)(Aj-i-I)Δ]≥0
則可以使得終端估計誤差協(xié)方差最大化,更新值序列按時間倒序就是最優(yōu)攻擊策略。
5 仿真驗證
考慮一個穩(wěn)定的過程, 系統(tǒng)參數(shù)A=0.8,C=2,Q=1.5,R=1.2。其仿真結(jié)果如圖2所示。
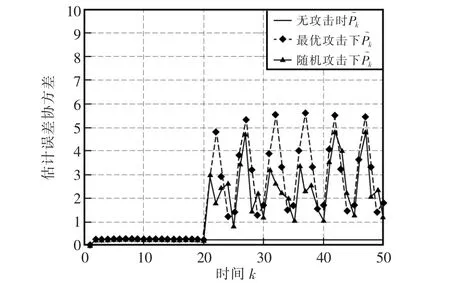
圖2 穩(wěn)定過程仿真Fig.2 Stabilization process simulation
假設(shè)傳感器能夠在每隔5 個時間間隙和遠程估計器進行一次通信, 即T=5。在時間區(qū)間[0,20]內(nèi),系統(tǒng)進入穩(wěn)態(tài)。在k=21 時,惡意攻擊者將啟動重新排序攻擊。最優(yōu)攻擊策略就是將更新值按時間反向順序重新排列,對應于圖2中的“最優(yōu)攻擊下”;“隨機攻擊下”表示攻擊者隨機切換數(shù)據(jù)序列。“無攻擊時”則表示未用攻擊的估計誤差協(xié)方差;在這種情況下,最優(yōu)重新排序攻擊下每個通訊周期的終端估計誤差協(xié)方差最大;當過程進入穩(wěn)定時,誤差協(xié)方差收斂。
參數(shù)為A=1.05,C=2,Q=1,R=1 的不穩(wěn)定過程在最優(yōu)重新排序攻擊、隨機攻擊下,遠程估計器的誤差協(xié)方差如圖3所示。由圖可見,在每個通訊周期內(nèi),最優(yōu)攻擊策略將使得終端估計誤差協(xié)方差最大化。值得注意的是,在這種情況下,與穩(wěn)定過程不同的是,誤差協(xié)方差隨著時間趨于無窮而發(fā)散。
6 結(jié)語
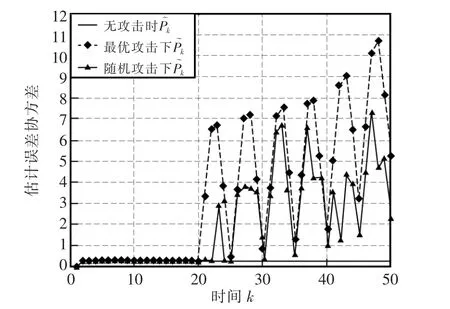
圖3 過程不穩(wěn)定的仿真Fig.3 Simulation of process instability
CPS 被稱為下一代智能系統(tǒng),將進一步改變?nèi)伺c物理世界的交互方式,實現(xiàn)人、計算、物理資源的高效協(xié)調(diào)與緊密結(jié)合。針對CPS 的狀態(tài)估計場景,文中提出了一種新穎的數(shù)據(jù)重新排序的攻擊策略,可以成功地繞過χ2虛假數(shù)據(jù)檢測器,進而降低系統(tǒng)的估計性能;給出了遠程估計誤差協(xié)方差在攻擊下的演化過程,并分析了系統(tǒng)性能的下降。為能夠更好的體現(xiàn)所提出攻擊策略的效果,以終端估計誤差協(xié)方差作為性能指標,證明了按時間反向順序排列創(chuàng)新序列是最佳的攻擊策略,使得終端估計誤差協(xié)方差最大化。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·七年級數(shù)學人教版(2022年11期)2022-02-14 07:14:12
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科普童話·學霸日記(2020年1期)2020-05-08 16:45:11
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小天使·一年級語數(shù)英綜合(2019年2期)2019-01-10 11:57:30
兒童繪本(2018年5期)2018-04-12 16:45:32
數(shù)學大世界(2018年1期)2018-04-12 05:39:14
