自適應模糊PID倉儲溫度控制系統的仿真
2019-06-18 13:35:56舒大松伍子祺
唐山師范學院學報 2019年3期
舒大松,伍子祺
?
自適應模糊PID倉儲溫度控制系統的仿真
舒大松1,伍子祺2
(1. 湖南廣播電視大學 機電工程系,湖南 長沙 410007;2. 武漢市第十一中學,湖北 武漢 430030)
倉儲室內溫度系統具有非線性、時滯性、大慣性、多變量耦合性的特征,采用傳統控制方法效果不太理想。將自適應模糊PID控制策略應用到物流倉儲溫度控制系統,并通過Matlab/Simulink平臺建立仿真模型,仿真試驗結果表明,自適應模糊PID溫度控制系統顯示出優良的性能。
自適應模糊控制;PID;倉儲溫度
1 倉儲溫度控制系統方案設計
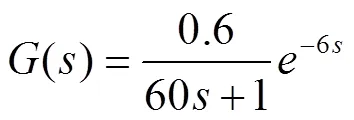
針對不同地區、不同季節、不同食品類別、不同保鮮要求,儲藏室的溫度需要動態調整并且精確控制。倉儲溫度系統具有明顯的非線性特征,同時溫度傳感器測量并傳輸數據時存在延時性特征、物流倉儲室內溫度控制系統近似于一階慣性純滯后模型,傳遞函數如式(1)所示。


2 自適應模糊PID溫度控制器設計
PID是經典的閉環控制方式之一,將被控對象偏差的比例、微分、積分進行線性組合得到控制量。PID控制系統的結構框圖如圖1所示。

圖1 PID控制系統結構
控制系統數學模型如式(2)所示。

式中,p表示比例系數、i表示積分系數、d表示微分系數[1]。比例系數p主要影響系統響應速度和穩定性[2]。如果p值設置過大,系統的響應過程中會出現嚴重的超調,甚至振蕩,系統的穩定性變差。如果p值設置過小,調節精度下降,響應時間太長,控制精度下降。積分系數i作用在于降低系統的穩態誤差。如果i值設置太大,控制系統會出現大幅度的超調,振蕩頻率加快,將大幅削弱系統的穩定性。微分系數d主要影響系統的動態特性,對系統穩態誤差、響應速度、超調量有綜合的作用。d值設置過大,會限制i、p值的調節效果,大幅削弱系統的抗干擾能力。
因此,p、i、d值對系統的穩定性、響應速度、超調量、精度等方面具有較大的影響。為實現精確高效的控制效果,PID控制系統的這三個參數需要協調修正,但缺少嚴格的公式可以依據,需要根據經驗進行模糊調整。模糊控制器就是為了實現這一功能。
模糊控制器的一般結構主要由模糊化[3]、知識庫、模糊推理、清晰化等四部分組成。
[10]technology is getting better=>advances in technology(選自 Halliday&Matthiessen 2004/2008:656-657)
模糊化是將輸入的精確量轉換為模糊量[4],然后進行尺度變換,使其落入到模糊集的范圍內,從而用相應的模糊集合數表示,如(3)式所示。

知識庫主要由反映控制專家經驗知識的規則庫與反映應用領域的數據庫組成。數據庫包含了具體應用領域中的知識和要控制的目標,由語言變量隸屬度函數、變換因子以及模糊空間的量化等級組成。規則庫主要是用模糊量表示的模糊規則。
模糊推理是模擬人類模糊思維的方式,通過模糊邏輯中蘊含的關系及推理規則編輯模糊語句實現。
清晰化也稱為反模糊化,是對模糊控制量的反模糊化處理,將模糊量變換為模糊集合中論域范圍內的模擬量,再通過尺度變化將清晰量變換成實際被控對象能夠接受的輸入量。
利用模糊控制理論的優勢[5],設計自適應模糊PID控制器,具體結構如圖2所示。

圖2 模糊自適應PID控制器





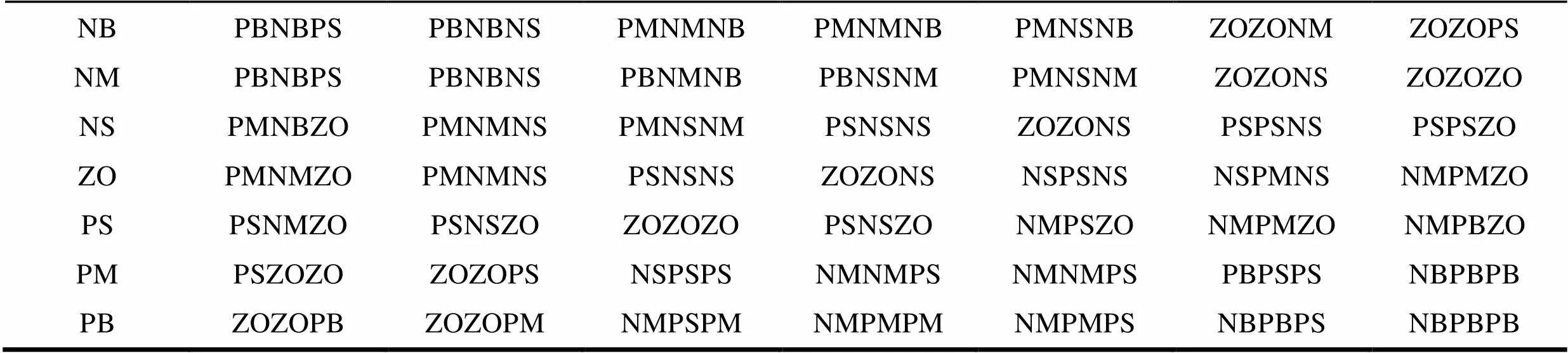
表1 三參數模糊控制器的控制規則
(續表1)
NBPBNBPSPBNBNSPMNMNBPMNMNBPMNSNBZOZONMZOZOPS NMPBNBPSPBNBNSPBNMNBPBNSNMPMNSNMZOZONSZOZOZO NSPMNBZOPMNMNSPMNSNMPSNSNSZOZONSPSPSNSPSPSZO ZOPMNMZOPMNMNSPSNSNSZOZONSNSPSNSNSPMNSNMPMZO PSPSNMZOPSNSZOZOZOZOPSNSZONMPSZONMPMZONMPBZO PMPSZOZOZOZOPSNSPSPSNMNMPSNMNMPSPBPSPSNBPBPB PBZOZOPBZOZOPMNMPSPMNMPMPMNMPMPSNBPBPSNBPBPB
3 仿真實驗分析
在MATLAB編程窗口中輸入“fuzzy”,按下enter鍵,啟動MATLAB模糊控制工具箱,通過菜單欄edit中“Add Variable”設置模糊控制器的輸入輸出。
={-7,-6,…,0,…,6,7}
分別對應模糊語言控制的七種狀態,輸入量相應劃分為正大(PB)、正中(PM)、正小(PS)、零(ZO)、負小(NS)、負中(NM)、負大(NB)7個量化等級。對X論域采用分辨率極強的三角形分布隸屬函數對輸入數據進行擬合。

L1:If E is NB and EC is NB thenp is PB andi is NB andd is PS
L2:If E is NB and EC is NM thenp is PB andi is NB andd is NS
L48:If E is PB and EC is PM thenp is NB andi is PB andd is PS
L49:If E is PB and EC is PB thenp is NB andi is PB andd is PB
在模糊控制工具箱中,由菜單欄“view”中的“rules”輸入模糊控制規則,由“surface”獲得模糊控制器的輸出特性視圖,進而觀察輸入量和輸出量在全范圍內連續變化所對應的關系,如圖4、圖5、圖6所示。

圖4 Kp模糊控制器輸出特性

圖5 Ki模糊控制器輸出特性

圖6 Kd模糊控制器輸出特性
將模糊控制程序通過模糊控制工具箱“file”菜單中的“import”輸出到“workplace”工作空間,與simulink中的模糊邏輯模塊建立連接。選取階躍信號來模擬溫度信號進行仿真實驗,結果如圖7所示。

圖7 自適應模糊PID控制器與PID控制器
自適應模糊PID控制與PID控制的響應速度相當,而在超調量、穩態誤差、精度方面,自適應模糊PID控制明顯優于PID控制。
4 結論
模糊自適應PID控制器的原理實際上仍屬于PID控制,通過借助控制經驗自動修正PID控制系統參數,提高PID控制性能。仿真實驗結果表明,模糊自適應PID倉儲溫度控制器具有優良的控制效果。
[1] 付瑞玲,樂麗琴.基于MATLAB/Simulink的PID參數整定[J].工業控制計算機,2013,26(8):75-76.
[2] 王慶蘭,石學文,張同對.臨界比例度法整定PID控制器參數[J].唐山師范學院學報,2016,38(5):58-60.
[3] 馬軍爽,郭耀華,王維.模糊-PID雙模控制器在水位控制中的應用[J].唐山師范學院學報,2007,29(5):104- 106.
[4] 曾光奇.模糊控制理論與工程應用[M].武漢:華中科技大學出版社,2012:66-68.
[5] 李岳林,謝安平,龔宏義,等.基于MATLAB的轎車電動天窗防夾系統建模與仿真[J].公路與汽運,2014,(6):4-8.
[6] 趙麗,朱學軍,白雪萍,等.杏鮑菇栽培環境濕度建模與控制器設計及仿真[J].中國農機化學報,2016,37(6):79- 83.
[7] 文生平,趙國平,蔡康雄.一種變論域模糊控制自適應算法[J].控制理論與應用,2009,26(3):265-268.
[8] 潘玉成,林高飛,陳小利,等.基于模糊專家控制的茶葉炒制溫度控制系統[J].食品與機械,2016,32(11):79-84.
Simulation of Adaptive Fuzzy PID Storage Temperature Control System
SHU Da-song1, WU Zi-qi2
(1. Department of Mechanical and Electrical Engineering, Hunan Radio and Television University, Changsha 410007, China; 2. Wuhan No. 11 Middle School, Wuhan 430030, China)
The indoor temperature system of storage has the characteristics of nonlinearity, time lag, large inertia and multivariable coupling. The traditional control method is not ideal. In this paper, an adaptive fuzzy PID control strategy is proposed, which is applied to the logistics storage temperature control system. The simulation model is established by Matlab/Simulink platform. The simulation results show that the adaptive fuzzy PID temperature control system has excellent performance.
adaptive fuzzy control; PID; storage temperature
TP399
A
1009-9115(2019)03-0072-04
10.3969/j.issn.1009-9115.2019.03.020
湖南省教育廳科研資助項目(14C0780)
2018-09-18
2019-01-06
舒大松(1962-),男,湖南長沙人,教授,研究方向為人工智能與自動化控制。
(責任編輯、校對:田敬軍)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45