反應堆壓力容器六軸機器人檢測系統的研究
2019-06-24 12:28:14魏文斌汪千強
制造業自動化 2019年2期
魏文斌,汪千強
(1.山東核電有限公司,山東 265116;2.江西工程學院,江西 338029)
0 引言
反應堆壓力容器和壓力容器頂蓋是核電站的重要部件,是作為防止回路放射性物質泄漏的屏障之一,承受著回路冷卻劑的高溫、高壓和高放射性的作用,壓力容器的密封面上通常會存留一些粉塵和劃痕,會影響壓力容器的密封性能,在核電站役前和在役期間均需要進行必要的無損檢驗。由于工況的特殊性,人員無法進入壓力容器內部或頂蓋下方進行檢查,同時出于無損檢測重復性及穩定性的需要,針對壓力容器及頂蓋的檢查,設計了一種在末端攜帶檢測探頭的六軸機械手,對反應堆壓力容器和壓力容器頂蓋進行周期性自動檢查。
該機械手具有六個自由度,分別是沿壓力容器圓周方向的運動、軸向運動以及各個關節的旋轉運動。設計為長度可伸展以適應不同直徑的容器檢測。
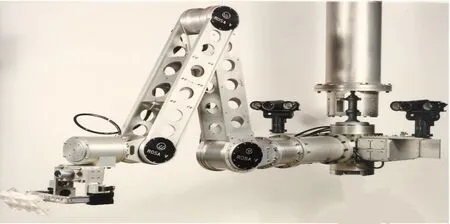
圖1 機械手示意圖
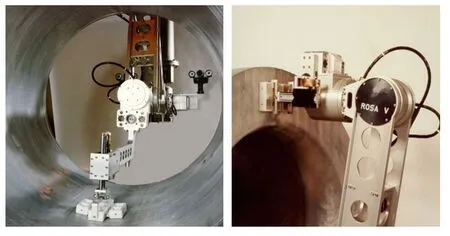
圖2 機械手末端攜帶不同類型掃查器檢測不同區域的狀態圖
1 機器人控制系統的設計
自主化控制系統主要用于六軸機械手的運動控制,以滿足反應堆壓力容器及頂蓋的檢測需要。該系統分為三大模塊:上位機系統、下位機系統、軟硬件平臺接口系統[1~3]。
軟件運行構架如圖3所示,上位機系統主要根據鍵盤鼠標的輸入,指定機械手要達到的位置,通過運動學分析模塊把各個關節的控制信號傳給機械手控制器,以此來控制機械手運動,同時通過仿真模擬模塊直接輸入機械各軸的位姿來模擬機械手的運動狀態。六軸機械手在指定空間范圍內的連續動作以實現各種掃查功能,上位機用戶界面提供實時狀態反饋和機械手三維姿態;下位機系統通過采集傳感器信號,傳輸給上位機系統,經數據處理后得到輸出信號,由驅動電機帶動整個機械手。接口系統將機械手各個電機的位姿信息提供給運動控制模塊和仿真模塊,仿真模塊處理信息后將機械手的三維位姿情況顯示在人機交互界面[4~6]。
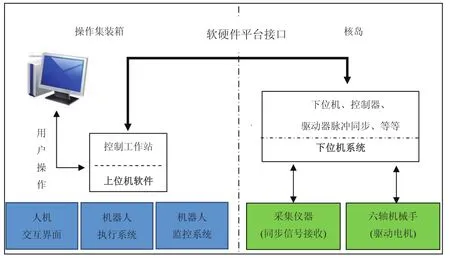
圖3 控制系統構成示意圖
1.1 機器人上位機系統設計
如圖4所示,上位機系統框架分為三個部分:機器人執行與仿真環境生成子系統、機器人執行業務邏輯子系統和基于ROBCAD的人機交互界面子系統。一般ROBCAD采用HP UX 10.10操作系統,軟件控制平臺為ROBCAD7.1,系統運行界面是通過定制過的ROBCAD的用戶界面。但本系統中上位機軟件控制部分是基于ROBCAD平臺集成的,將現有的應用移植到Windows環境中,復制現有的各種業務邏輯,并建立和下位機的通訊,對現有的設備控制進行集成[7]。

圖4 上位機系統框架圖
1.1.1 機器人執行與仿真環境生成子系統
1)設備幾何模型系統
包括核電設備和機器人幾何模型,導入為ROBCAD接受的格式IGES,STEP格式。建立幾何模型轉換器,用來轉換通用的幾何模型,設置模型的質量屬性、關節、材質等特征。
2)軌跡點生成系統
利用ROBCAD環境,在ROSE API環境下根據路徑規劃算法動態生成機器人需要執行的軌跡點。其中路徑規劃(path planning)算法是通過ROBCAD找到無干涉,并能完成任務的路徑點。生成一系列運動連續的參考點,以發送到控制器驅動機器人運動。即通過路徑規劃找到一系列要經過的路徑點,這些點只是空間中的一些位置,或者關節角度,通過ROBCAD軌跡規劃確定怎么走,走多快,它需要賦予這條路徑以時間信息。本項目對于路徑規劃,采用RRT、PRM以及他們的各種改進算法。軌跡規劃采用ROBCAD的S型規劃等優化算法,保證時間最優,能量最小等方法規劃求解。
表1 機器人執行業務邏輯子系統
1.1.2 人機交互界面子系統
ROBCAD軟件在Unix環境下開發的,盡管有windows版本,ROBCAD系統仍然是Unix的Motif界面,在Exceed虛擬機上運行。基于用戶接口語言ROBULL,采用OSF-Motif標準。
對ROBUIL提供的界面對象以及回調函數工具箱,用戶通過界面對象可以設計自定義的應用程序。
1.2 軟硬件接口平臺設計
如圖5所示,機器人執行命令接口分為4部分:
1)控制指令集定義與生成:采用標準機器人語言來定義,以滿足擴展,包括運動、信號處理、流程控制、數學運算、邏輯運算、文件管理、數據編輯等指令;
2)通信協議:采用標準TCP/IP接口來實現;
3)控制指令生成:根據軌跡路徑、機器人運動學對軌跡進行離散,生成控制指令集;
4)生成的指令校驗:根據設置的校驗碼進行指令校驗,以防功能性故障。
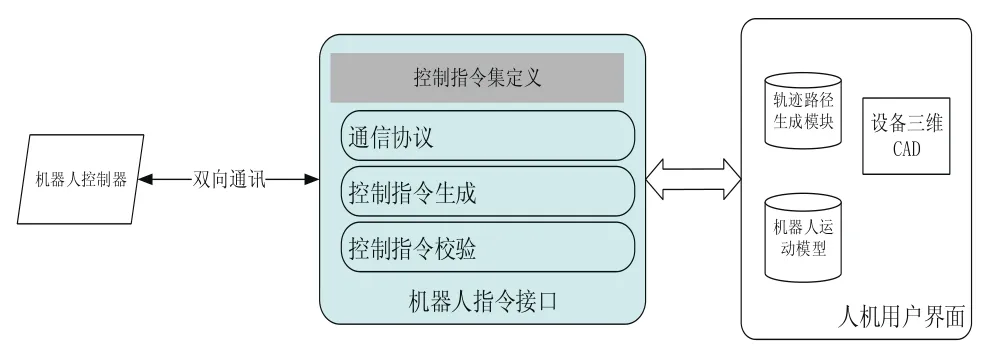
圖5 機器人執行命令接口
如圖6所示,機器人檢測監控接口分為4部分:
1)控制原始目標定義:對待檢測目標進行空間建模,轉換到實際坐標系進行融合。并繪制目標預計軌跡和控制精度;
2)通信協議:標準TCP/IP協議;
3)機器人位姿讀取同步器:基于固定幀,實現定間隔對機器人裝置的各種位姿信號進行同步掃描,滿足實時可控數據同步;
4)狀態比對:根據讀取的信息,通過ROBCAD中建立的仿真模型實時復演比對,實現誤差顯示,可以完成實時精度補償。
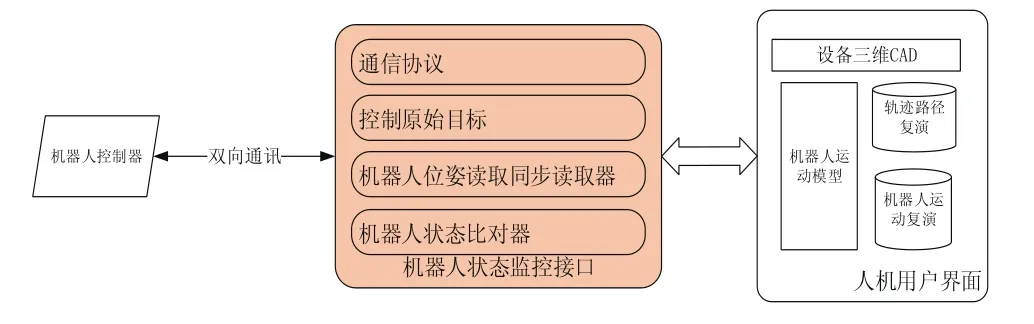
圖6 機器人檢測監控接口
2 六軸機器人笛卡爾路徑規劃
為實現對六軸機器人的運動控制系統的監測,實現機器人的運動軌跡按預設軌跡動作,需要對機器人進行末端直線和圓弧路徑規劃[8,9]。為保證檢測質量,機器人的末端除了沿軌跡線運動外,還需確保檢測頭始終垂直于當前點的法線方向。為此需要對機器人進行六自由度路徑規劃,確保機器人的位置和姿態滿足任務需求。
2.1 位置規劃
2.1.1 直線路徑規劃
為保證機械臂末端運動的平滑性,機械臂末端按圖7所示的梯形速度曲線運動。

圖7 梯形速度曲線
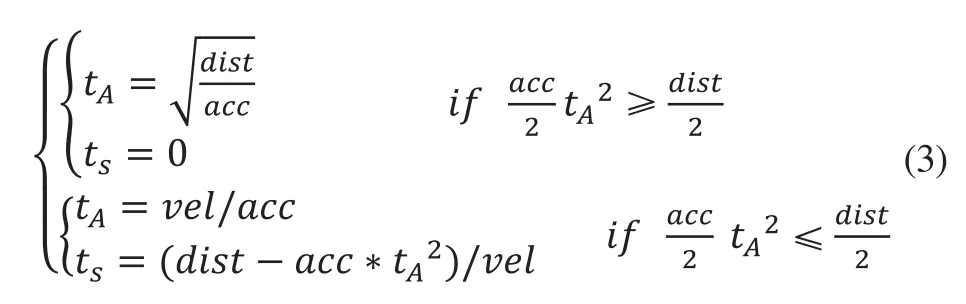
1)確定加速時間tA:

式中,vel是預定的末端速度,acc是預定的末端加速度。
2)求插補直線長度:
如果起始點和終止點分別用Ps和Pf表示,則兩點間的距離為:

(1)修訂速度軌跡曲線:
(2)確定每次運動的步長
采用定時插補,插補周期為T,則插補次數為:

根據圖6中的梯形速度曲線,可以計算出第k次插補時走過的位移:
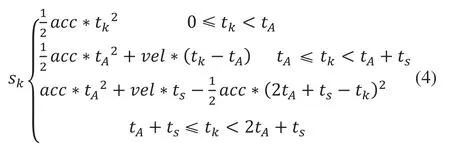
則下一步的位置為:

2.1.2 圓弧路徑規劃
給定圓弧起始點Ps、終止點Pf以及與Ps和Pf不共線的路經點Pm,可以確定空間上的一條圓弧。以圓弧的圓心為原點,圓心指向起始點Pf為X軸,圓弧所在平面的法線為Z軸建立坐標系O*-X*Y*Z*,如圖8所示。
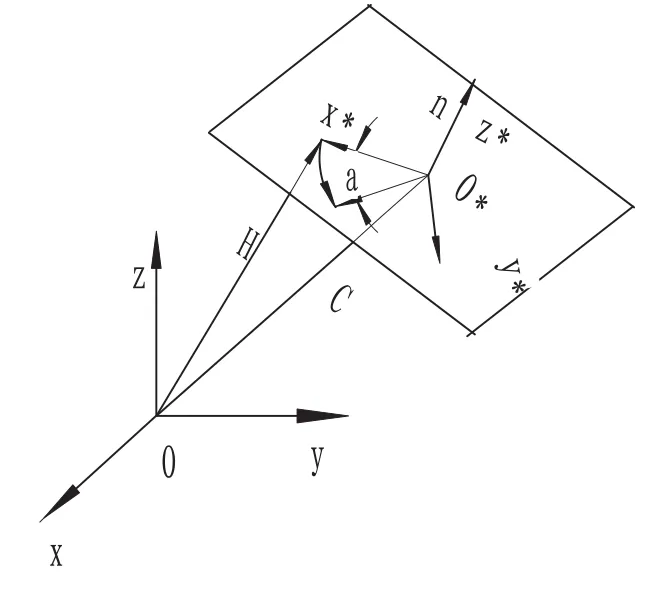
圖8 圓弧路徑規劃
將Ps、Pf和Pm轉換到坐標系O*-X*Y*Z*中,得到平面上的點Ps*、Pf*和Pm*,求出此時的圓心角,如圖9所示。
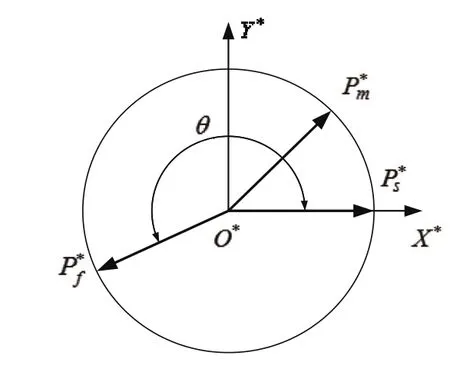
圖9 平面上的圓弧
則圓心角θ為:
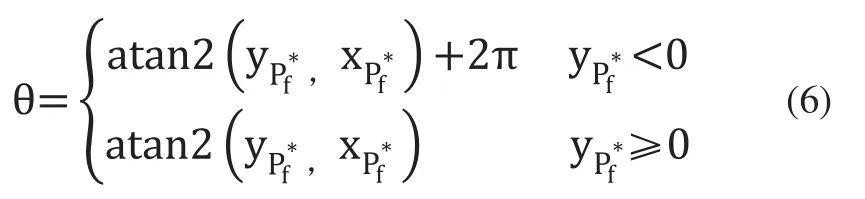
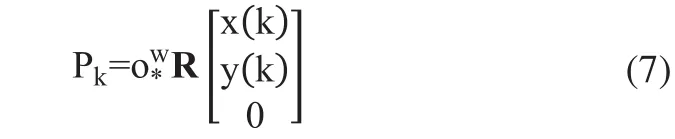
圓心角θ按圖7中的梯形速度曲線變化,根據上面式(6)計算第k次插補時的圓心角,進而可得到坐標系O*-X*Y*Z*中機器人末端的坐標。將此坐標轉換到世界坐標系中,得到機械臂末端在世界坐標系中的坐標:
2.2 姿態規劃
采用單位四元數來表征機器人末端姿態并進行姿態的規劃。單位四元數的形式為,其中:

由式(9)可以很方便地求出轉動角度和轉軸方向,然后就可以根據上面式(1)進行插補計算。
3 系統應用
系統已經在山東海陽核電站的“核電站反應容器機器人檢測”的項目上得到了應用。系統最大掃描速度為120mm/S,機械手末端可以驅動15KG的端部效應器,負載為16kg,絕對位置重復精度為±0.95mm,累計位置精度±5.5mm,可以根據法規及實際檢查需要,通過相應參數選擇和設定實現壓力容器各檢查部位的掃查路徑生成,并可實現掃查路徑的單步、連續、中斷續檢等過程控制。核電站的應用,充分通過實踐驗證了該系統的可靠性及實用性。

圖10 反應容器內機械手模型

圖11 系統掃描軌跡生成
4 結束語
本文綜合考慮核電站反應堆壓力容器檢測機器人在機械部分、電氣控制和探測儀器等諸多因素,設計實現了反應堆壓力容器六軸機器人檢測控制系統。該檢測控制系統的基本功能、可靠性、安全性和技術指標已滿足核電站工程應用現場的實際檢測要求,提高了反應堆壓力容器無損檢測的重復性以及穩定性,達到了良好的效果,由此可見,該系統可以進一步的適應于各種特殊的核環境,有較大的普適性跟推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
