基于深度學習的耕地變化檢測技術
2019-06-25 09:54:04楚博策王士成陳金勇
無線電工程 2019年7期
高 峰,楚博策,帥 通,王士成,陳金勇
(中國電子科技集團公司 航天信息應用技術重點實驗室,河北 石家莊 050081)
0 引言
耕地是農業的基礎,伴隨著信息化時代的到來,應用空間信息化技術進行耕地信息的快速獲取與檢測己成為時代發展的必然。尤其是近年來,隨著我國改革開放的深入,準確地掌握區域范圍內耕地分布和變化情況,不僅是技術發展的需要,更是開展農業發展宏觀管理的必需。
石家莊是華北平原地帶經濟發達地區的城市,現代農業發達,是華北地區主要農產品供應基地。耕地是農業生產發展的基礎,是社會穩定的前提條件。但由于石家莊耕地區域覆蓋面大、分布廣,針對該區域的耕地資源調查較為耗時耗力,除此之外,針對國家出臺的“退耕還林”“嚴厲查處違法占地”等政策的落實情況也急需實現核查驗證。因此,在耕地形勢日益嚴峻的大形勢下,有效利用遙感檢測技術明確現有可利用耕地面積與變化情況[1-2]顯得尤為重要。
遙感影像耕地提取目前在各監管部門主要采用人工目視解譯的方法[3-4],隨著衛星載荷與數據量的逐步增加,特別是面對高頻率、大范圍耕地區域對比,傳統人工標定的方法難以支撐爆發式增長的任務與需求,因此,研究如何采用人工智能的方法實現遙感影像智能化處理是一項具有深遠意義的工作。
隨著人工智能的不斷發展,深度學習[5]已經在語音識別、圖像識別和信息檢索等領域取得了成功,這些應用也證明了深度學習是一種行之有效的自動化分類識別工具。這一類模擬大腦學習過程的方法相比傳統人工設定特征內容的方法具有更好的特征抽象性和魯棒性。然而,目前將深度學習應用于遙感地物變化檢測的研究工作相對較少。本文采用一種基于深度學習語義分割的遙感影像耕地提取方法,將應用于語義分割任務的深度學習模型——全卷積深度網絡,進行遙感影像的耕地提取,實現了分割與分類過程的一體化,通過對比多時相影像分類結果實現耕地資源的變換檢測。實驗表明,設計的深度學習方法在耕地變化檢測中具有較好的應用效果。
1 遙感耕地變化檢測技術處理流程
本文設計的基于深度學習的耕地變化檢測流程如圖 1所示。

圖1 耕地變化檢測流程
采用深度學習的方法首先要對遙感影像進行地物標注,隨后采用全卷積網絡對影像進行網絡訓練,其中包括卷積特征提取和反卷積映射,通過從下到上的上采樣計算得出原始圖像中每個像素所屬類別的概率,最后通過標注影像和網絡輸出影像對比計算損失函數實現網絡模型訓練。在進行變化檢測時,首先需要對同一區域多時間點的2幅影像進行切塊,對切塊影像采用之前訓練得到的模型進行耕地區域分類[6],通過影像配準[7-8]實現分類結果精確對準,隨后采用差值法[9]直接得到耕地變化結果。由于全卷積網絡為像素級分割網絡,因此變化對比結果會出現較多像素碎片,本文采用腐蝕、膨脹等形態方法[10]進行后處理得到最終變化檢測結果。
2 全卷積深度學習網絡
傳統的耕地提取方法[11]大多采用分割+分類的2階段模式,分類結果不單取決于分類模型的精度,還受制于分割結果的準確性。全卷積神經網絡(FCN)[12]可以做到對圖像進行像素級的分類,實現端到端的原始影像至分類結果的直接生成,解決了語義級別的圖像分割(Semantic Segmentation)問題,因此較為適合應用于耕地提取任務當中。
傳統CNN分類網絡通常會在最后連接幾層全連接層,它將原來二維的矩陣(圖片)壓扁成一維的,丟失了空間信息,最后訓練輸出一個標量(也就是分類標簽)。而耕地提取任務不但要知道圖像中包含的地物類別,還需要分割出不同地物所處的位置。本文采用的FCN,相比于其他CNN,不同的是去掉了原始CNN最后的全連接層,采用反卷積層對最后一個卷積層的特征映射進行上采樣,使它恢復到輸入圖像相同的尺寸,最后逐個像素計算softmax分類的損失,相當于每一個像素對應一個訓練樣本。因此可以對每個像素都產生一個預測,保留了原始輸入圖像中的空間信息。具體網絡結構如圖2所示。
將全卷積后的結果直接上采樣,得到的結果是很粗糙的。由于高分辨率遙感圖像具有非常細節的信息,底層低分辨率語義特征直接進行圖像分類,將會產生明顯的誤差,所以FCN將不同池化層的結果進行上采樣后,與下采樣后的結合形成優化輸出后,進行上采樣得到最終分類結果[13]。

圖2 FCN網絡結構
3 耕地變化檢測方法
本文采用SITF-RANSAC[14]方法實現不同時間拍攝的同區域影像精配準,由于耕地分類結果為二值圖形式,可以直接對2幅分類結果圖進行求差操作,得到耕地變化初始結果,通過對其進行形態變換后處理得到最終變化檢測結果[15]。圖3(a)和圖3(b)中為輸入的2幅不同時間的影像,分別進行耕地提取得到圖3(c)和圖3(d)兩幅二值影像,對其求差得到粗糙的變換檢測結果,隨后通過形態學后處理得到圖3(f),可以看出后處理能有效地減少神經網絡帶來的像素級斑點誤差。

圖3 耕地變化檢測效果
4 實驗與分析
4.1 實驗數據集制作
本文中涉及的訓練和測試數據為實際地區的RGB可見光影像,影像獲取主要從Google Earth等軟件中進行截取,將該區域的寬幅影像裁切為512×512的標準影像塊并自行標注,總共包括500余幅影像塊,其中訓練集與測試集比為5∶2,影像空間分辨率為10 m。該區域地物類型主要包括耕地與城鎮區域。
4.2 網絡參數設置
本文實驗中設置學習速率的初始值為0.000 1,隨著訓練誤差的變化趨勢動態調整學習速率。由于全卷積網絡內存占用率較高,實驗中將樣本集設置為小樣本集batch_size為10個樣本進行分批訓練。由于本次實驗為二分類,隨著迭代次數增加準確率逐漸上升同時容易產生過擬合,實際應用中應酌情控制迭代次數,本次實驗準確率與迭代次數關系如圖4所示。

圖4 耕地提取準確率與迭代次數關系
由圖4可以看出,在訓練集中,隨著迭代次數增加,準確率不斷升高,而測試集中,當迭代次數超過20 000次后準確率下降,表明此時模型已過擬合,因此實驗選取20 000次迭代得到最終模型。
4.3 實驗結果與分析
實驗中對100余幅512×512影像作為測試樣本進行測試。實驗結果如表 1所示,可以看出耕地提取結果可達到98%以上,相比傳統方法85%左右的精度來說提升10%。除此之外,據統計,人工目視判讀的平均精度為95%,本文方法已經在一定程度上優于人工判讀結果。變化檢測結果約95%,已達到實際應用的標準。
表1 不同網絡輸入分類效果對比表
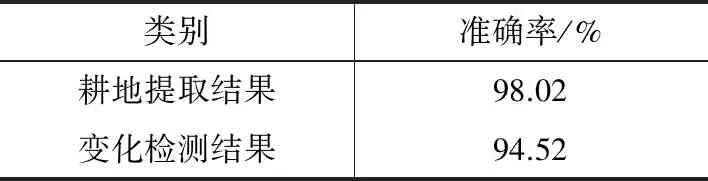
類別準確率/%耕地提取結果98.02變化檢測結果94.52
本文軟件的實現采用Tensorflow架構和Python腳本語言,硬件配置GPU采用NVIDIA Quadro P5000,內存為48 GB。基于該硬件配置本文算法運行速率可達到0.2 s/幅(512×512尺度影像),10 000×10 000影像的處理時間約為30 s左右,相比于傳統人工方法接近6 h/景的處理時長,本技術在時效性上具有較大提升。
5 結束語
本文將全卷積深度神經網絡與耕地范圍提取任務相結合,實現目前機器學習方法中最優提取結果,隨后通過配準、取差和后處理等方法提取不同時段變化區域,實現耕地范圍的自動化變化檢測。此方法無論在準確率還是在計算速率方面均具有較大優勢,由此可見采用全卷積深度學習的變換檢測方法逐步取代人工目視判讀將成為今后的發展趨勢。
深度學習在遙感影像變化檢測領域具有較大潛力,但是作為一種新興的技術,仍有很多工作需要研究,下一步,將研究除了耕地之外不同地物特性與不同深度學習網絡結構之間的關系進而實現更高精度更多類別的耕地提取。除此之外,本文變化對比所采用的差值方法較為粗糙,后續將根據不同業務對象研究不同的對比方式進而提高變化檢測精度。
猜你喜歡
中國化肥信息(2022年8期)2022-12-05 20:01:27
今日農業(2022年13期)2022-11-10 01:05:49
北京測繪(2021年12期)2022-01-22 03:33:36
今日農業(2021年14期)2021-11-25 23:57:29
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
