吊桿式起重機二維擺動的防擺控制研究
2019-06-25 12:09:38賈鵬霄李鑫偉
噪聲與振動控制 2019年3期
關鍵詞:設計
賈鵬霄,周 越,李鑫偉
(北京林業大學 理學院,北京100083)
高速大噸位的吊桿式起重機目前已經廣泛地應用于建筑業和港口運輸業[1]。吊桿式起重機通過在臂架末端懸掛負載可以實現起重和吊裝等功能。吊桿式起重機的運動主要包括臂架的俯仰運動和轉臺的回轉運動[2]。但是當轉臺進行回轉運動時,由于向心力的作用,一維的回轉運動往往會產生二維的負載擺動,這種擺動不僅降低起重機的作業效率,而且有可能與周圍的貨物或者操作人員發生碰撞,造成嚴重的安全事故。為了防止事故的發生,對起重機操作人員的操作水平提出了很高的要求,并且也增加了操作人員的工作負擔[3]。為了降低操作人員的工作負擔,目前已經有很多學者針對負載的防擺控制展開研究,提出了很多控制方案,包括最優控制[4],滑模控制[5],自適應控制[6],輸入整形控制[7],以及基于Lyapunov穩定性的非線性控制[8]等。
在已往的研究中,為了對負載的二維擺動進行抑制,需要同時控制臂架的俯仰運動和轉臺的回轉運動才能夠實現防擺的目的。這樣一方面增加了控制器的復雜程度,另一方面由于臂架俯仰運動需要克服負載重力,所以起重機要消耗更多的能量,增加了成本。考慮到這種擺動是由于一維的回轉運動引起的,所以研究只通過控制轉臺的回轉運動就能實現轉臺的定位和防擺的控制器就顯得非常重要。
目前國外已經有一些學者針對通過轉臺回轉運動來抑制負載擺動這種方案展開了研究。文獻[9]提出了一種開環控制方法,通過對轉臺回轉運動的軌跡進行規劃來實現負載的擺動抑制。但是當外界有其他干擾時,這種開環控制系統的控制效果就會變差。為此,本文設計了一種僅需控制回轉運動就能實現定位和防擺的非線性控制器,并且通過Lyapunov 穩定性理論對控制器的穩定性進行了證明。仿真實驗驗證了所設計控制器的有效性。
1 吊桿式起重機系統建模
吊桿式起重機的結構如圖1所示。負載通過繩索懸掛在臂架的頂端,臂架在液壓缸的作用下可以實現在豎直平面的俯仰運動,轉臺在液壓馬達的作用下可以實現在水平面的回轉運動。

圖1 吊桿式起重機
負載在空間的擺動可以用臂架平面內擺角θ1和平面外擺角θ2來描述。對于實際的起重機吊擺系統,其結構非常復雜,除了自身非線性的元件外,還會受到外界的各種干擾,包括各種摩擦、空氣阻力等的影響。為了方便對系統的動力學特性進行分析,進而對防擺控制進行研究,對實際的起重機系統進行如下的抽象簡化處理。
(1)把繩索懸掛的負載簡化為質點,假設吊繩剛度足夠大,且忽略其質量;
(2)假設負載擺動角度θ1和θ2都是可測的,并且其角速度有界;
(3)忽略系統內各機構間的摩擦和外部干擾。
根據上述簡化假設,可以將起重機抽象為如圖2所示的簡化模型。
假設負載的質量為mload,臂架長為LB,繩長為l。為了方便分析,假設臂架平面與沿起重機轉臺軸線水平X軸的夾角為回轉角α,臂架與豎直Z軸的夾角用β來表示。
只考慮臂架的回轉運動時,利用拉格朗日法可得到吊桿式起重機的動力學模型如下式所示
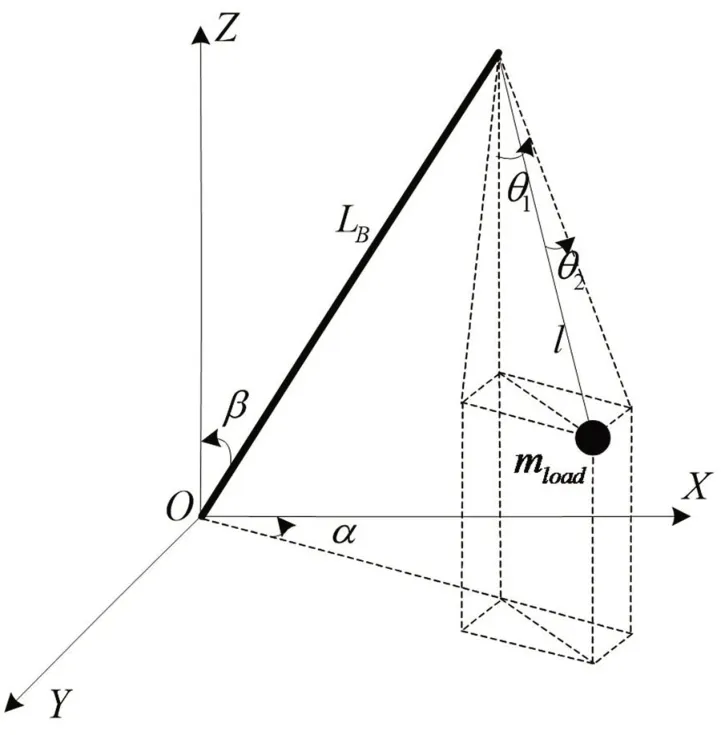
圖2 吊桿式起重機模型
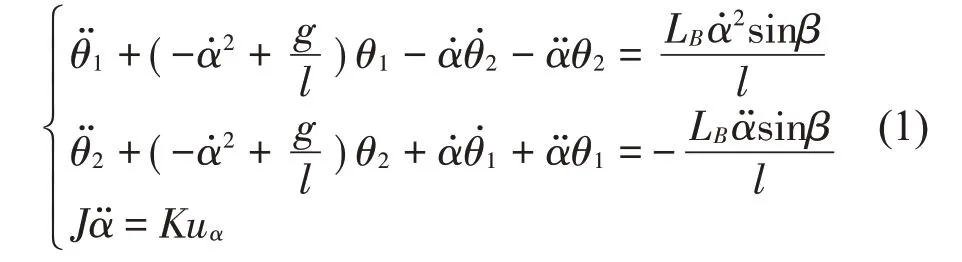
其中:uα是回轉運動的控制輸入,K是增益,J是回轉運動的轉動慣量,假定J是恒定的,并且忽略回轉運動過程中的摩擦力等外部干擾。為了進行防擺控制器的設計,假定負載擺角θi和擺角速度都很小,(i=1,2),于是在式(1)中,有因此,式(1)可進一步簡化為

2 控制器的設計和穩定性分析
在對控制器進行設計時,考慮兩個問題[10],一個是控制器必須使轉臺能夠盡快到達參考軌跡r指定的期望位置,即定位問題;另一個是轉臺轉動過程中和結束后應使負載的擺動盡可能的小,即防擺問題。假設轉臺運動的參考軌跡r的1階導數和2階導數存在且連續。為了對控制器進行設計,考慮如下的Lyapunov函數

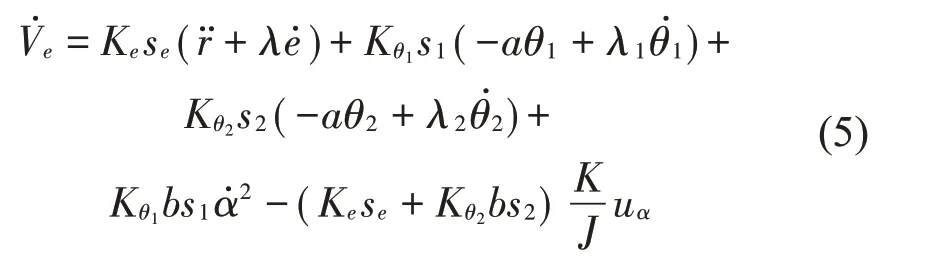
結合式(2)和式(3),提出如下的控制律

其中:p=Kese+Kθ2bs2,和K2是正常數,ε是一個很小的常數。
當 |p| ≥ε時,式(6)代入式(5)中,經過整理后可得

假定≠0,如果K2>1,則是負定的。
如果 |p| <ε,式(6)代入(5)中,經過簡單整理后可以得到

并且可以得到

其中:η1=2K1·min(Ke,Kθ2b2)
根據進行防擺控制研究的假設條件,θi和,i=1,2 有界,并且 |p| <ε,所以η2是有界的。通過調整控制律的參數,就可以實現理想的控制效果。
3 仿真分析
為了驗證所提控制方法的有效性,進行如下的仿真實驗。控制器的參數和模型參數如表1所示。
為了驗證所提控制器防擺控制的性能,采用普
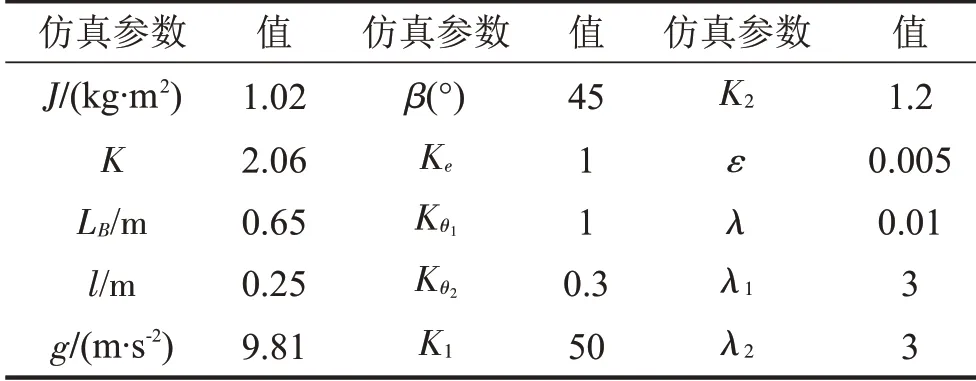
表1 仿真參數
通的PD控制器進行對比研究。
PD控制器的結構如下

其中:e=r-α。Kp=50,Kv=10;
考慮參考軌跡為五次多項式

采用PD 控制器的控制結果如圖3所示,在圖a中實線為參考軌跡,虛線為轉臺回轉角α,可以看到α可以很好地跟蹤上參考軌跡。圖b 為負載在臂架平面內的擺角θ1,由圖可以看到當轉臺轉角α轉到45°后,擺角θ1存在等幅振蕩;圖c為負載在臂架平面外的擺角θ2,由圖可見θ2也存在等幅振蕩。因此采用傳統的PD 控制器,轉臺回轉角α作為反饋,只能實現參考軌跡的跟蹤,并不能實現有效的擺動抑制。
采用本文設計控制器的控制結果如圖4所示。
在圖4(a)中實線為參考軌跡,虛線為轉臺回轉角α,可以看到α也可以很好地跟蹤上參考軌跡。圖4(b)為負載在臂架平面內的擺角θ1,由圖可見,轉臺轉角α到達45°后,θ1角基本為0;圖4(c)為負載在臂架平面外的擺角θ2,由圖可見,轉臺轉角α到達45°后θ2也基本為0;由此可見,采用本文所設計的控制器都作為反饋,既可以實現跟蹤參考軌跡的目的,也可以實現負載防擺的目的。
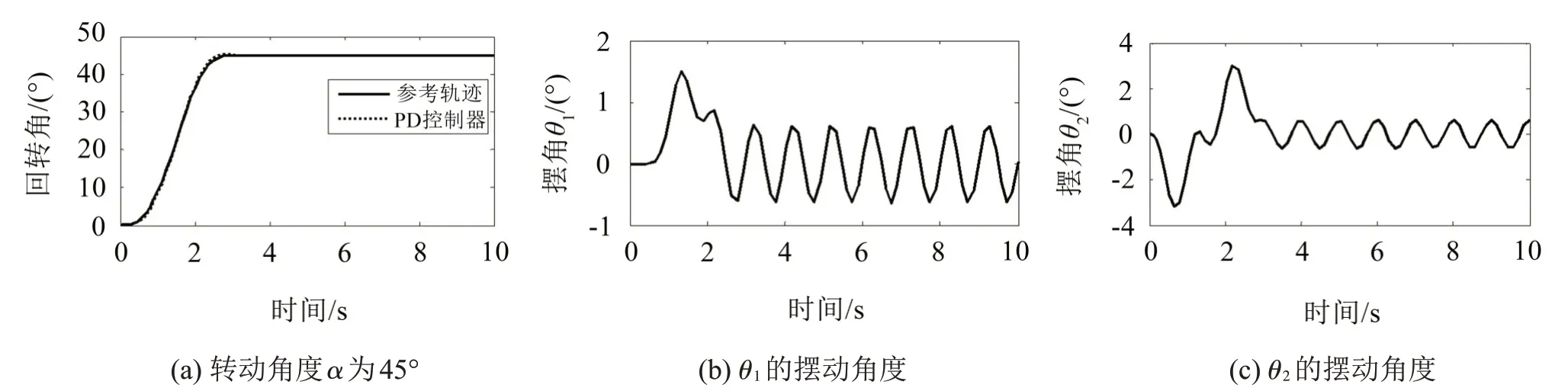
圖3 采用PD控制器
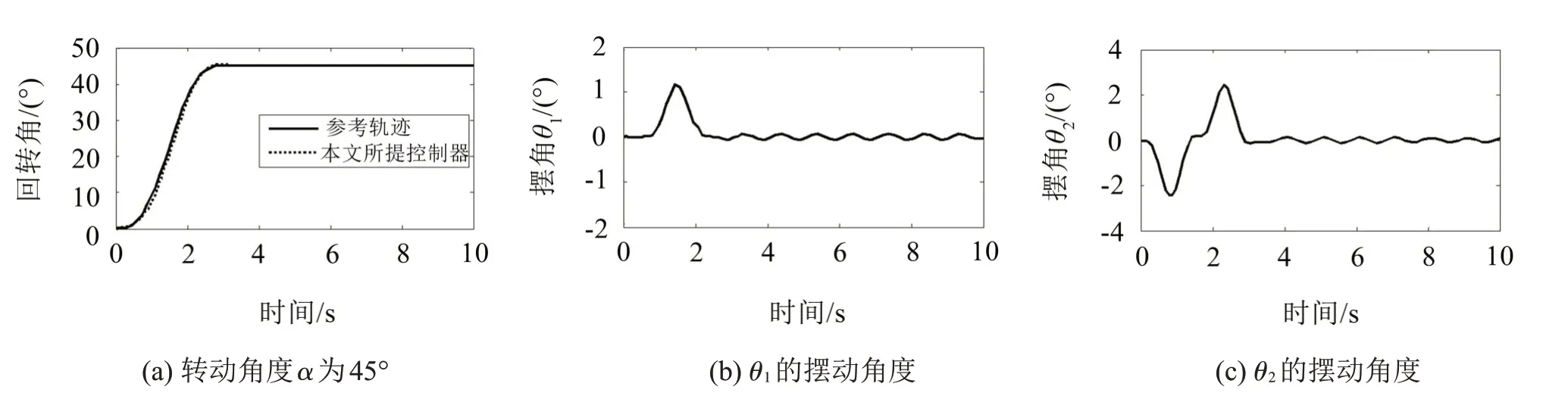
圖4 采用設計的控制器(α=45°)
4 結語
吊桿式起重機在進行回轉運動時會使懸掛的負載產生二維擺動;為了對二維擺動繼續抑制,本文提出了一種僅需考慮回轉運動就能實現定位和防擺的控制方法。首先采用拉格朗日法對吊桿式起重機進行建模得到了其動力學模型;然后基于這個模型,采用Lyapunov穩定性理論設計了一種非線性控制器;最后通過仿真研究驗證了本文所提方法的有效性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04