
自動駕駛汽車橫向模糊控制器設計
2019-07-01 08:57:52邵毅明陳亞偉
重慶交通大學學報(自然科學版) 2019年7期
邵毅明,陳亞偉
(1. 重慶交通大學 交通運輸學院,重慶 400074; 2. 重慶交通大學 機電與車輛工程學院,重慶 400074)
隨著智能技術發展,自動駕駛汽車已經成為汽車行業發展的新方向。運動控制是自動駕駛汽車研究領域的核心問題之一,其中橫向控制則是運動控制的一個重要方面。橫向控制可使車輛沿期望軌跡行駛,并在行駛過程中,保持車輛的穩定性和舒適性,它是實現車輛自動駕駛的基礎。由于車輛在行駛過程中具有高度非線性動態特性及隨機出現的外界干擾,故如何根據車輛實際情況設計出合理可靠的控制系統具有深遠意義[1-3]。
筆者基于車輛動力學模型,充分考慮實際交通場景中的車輛狀況,通過測試及總結熟練駕駛員操作經驗,設計了車輛橫向控制方案,并且利用模糊控制理論設計了橫向模糊控制器。
1 建立車輛動力學模型
車輛是一個復雜的非線性系統。在建立車輛動力學模型時,既要保證車輛動力學模型盡可能準確,同時要對其適當的簡化。故在建立模型之前做如下的假設:① 將前輪轉向角作為輸入;② 假設車輛只做平行于地面的運動;③ 忽略空氣阻力的影響;④ 認為地面切向力不影響輪胎側偏特性;⑤ 認為汽車行駛過程中輪胎特性不變。
根據上述假設,建立如圖1的車輛二自由度單軌模型,對在水平路面行駛的車輛建立慣性坐標系OXYZ和車輛局部坐標系oxyz,并在此基礎上對其做動力學分析。圖1中的符號含義如表1。

圖1 車輛動力學模型Fig. 1 Vehicle dynamics model

指 標橋形標A均值M標準差SD橋形標B均值M標準差SD橋形標C均值M標準差SD橋形標D均值M標準差SDSig.眼跳次數/次18.2676.28519.6676.92520.1336.46822.4675.4100.003??總注視次數/次26.4004.74826.9335.16127.5336.40227.9334.3010.761??興趣區內注視次數/次19.7335.75020.8005.32123.0675.92224.1334.4060.002??總注視時間/s7.2502.0337.4682.2366.5851.8837.0151.3600.408??平均注視駐留時間/s0.3020.1250.2800.0660.2440.0540.2620.0480.082??第一注視點時間/s0.5170.4030.3150.1490.3040.2340.2770.1950.032??
根據牛頓第二定律,列出如下車輛橫擺運動、縱向運動以及橫擺運動方程,如式(1)~(3):
(1)
(2)
(3)
由于側偏角在小幅度范圍內,側向力隨側偏角線性上升,此時車輛前后輪胎受到的側向力可近似表示如式(4):
Fyf=kfαf;Fyr=krαr
(4)
前后輪側偏角分別可表示如式(5)、(6):
(5)
(6)
將式(5)、(6)與式(1)~(3)聯立可得車輛橫向動力學模型,如式(7):
(7)
車輛循跡過程中,橫向誤差可表示如式(8)、(9):
(9)

(10)
(11)
式(7)所表示的車輛橫向動力學模型可改寫如式(12):

(12)


(13)
2 車輛橫向模糊控制研究
在得到車輛橫向動力學模型均是基于車輛勻速行駛并且在小轉角的情況下,只適用于道路平坦通暢,并且無較大轉角的場景。但實際上車輛所處的交通環境極其復雜,經常需要更改路徑,頻繁的變換速度,這種情況下上述關于車輛動力學的假設將無法成立,實際交通環境下的車輛會存在較多不確定因素,如系統模型參數的改變、未建模部分的影響、不可預測的外界干擾輸入等[4-7]。
故橫向控制系統必須具備在模型不精確或者其他外界條件干擾下,依舊有良好的自適應性,以便完成控制任務。同時對參數、外界條件變化的情況,還必須具備一定的魯棒性。考慮到車輛橫向控制的具有復雜性、行駛過程的非線性以及難以建立精確的數學模型等特點,筆者引入模糊控制方法。模糊控制能夠模擬人的行為,且不需要對控制對象精確建模,它是解決難以精確建模復雜非線性問題的有效手段[8-10]。
車輛在行駛過程中,控制系統要實時獲取外界環境和車輛狀態兩方面信息,控制系統流程如圖2,模糊控制器將兩部分信息融合,通過模糊控制器的推理機進行分析,最后輸出合適的前輪控制量,從而達到車輛橫向控制的目標。

圖2 控制系統Fig. 2 Control system
2.1 模糊控制原理
模糊控制的思想是將熟練人員的經驗總結為一系列的控制規則,再通過模糊推理得到合理的控制量作用于控制對象[11]。
模糊控制系統的關鍵部件是模糊控制器(圖3),它由以下幾部分組成:

圖3 模糊控制器結構Fig. 3 Fuzzy controller structure
1)模糊化接口:模糊化接口將輸入變量轉變為模糊矢量,以便控制器對其進行求解。
2)模糊數據庫:模糊數據庫的作用是在規則推理時向推理機提供數據。
3)規則庫:規則庫存放模糊規則,主要由熟練人員的經驗總結而來,通過一系列的關系詞連接而成。
4)推理機:推理機經過邏輯運算按照制定的模糊規則將輸入的模糊變量輸出。
5)解模糊化接口:解模糊化是將輸出的模糊量經過運算轉變為精確量的過程。
2.2 模糊控制器的設計
模糊控制器的設計主要包括:確定輸入輸出變量、模糊化、制定模糊控制規則、模糊推理和解模糊化等過程[12]。
2.2.1 確定輸入和輸出變量
模糊控制器的設計首先必須確定輸入和輸出變量。車輛在行駛過程中,所能獲得的數據一般有橫向誤差和橫擺角偏差以及兩者的變化率,車輛可依靠以上信息進行橫向操縱控制。為降低模糊控制的輸入維數,筆者以橫向誤差和橫擺角偏差為輸入變量,前輪轉向角為輸出變量[13]。
2.2.2 模糊化
選取橫向誤差eD,橫擺角偏差φD和前輪轉向角θ這3個語言變量的模糊論域為[-3,-2,-1,0,1,2,3],對3個變量論域取7個模糊子集,即PB(正大)、PM(正中)、PS(正小)、ZO(0)、NS(負小)、NM(負中)、NB(負大)。
eD>0表示車輛在道路中心線右側;eD=0表示車輛正位于道路中心線;eD<0表示車輛在道路中心線左側。
u>0表示前輪右轉;u=0表示不改變方向;u<0表示前輪左偏。
3個變量的模糊子集采用gaussmf型和trimf型。
2.2.3 制定模糊控制規則
模糊控制規則指通過模糊邏輯的模糊條件語句來表征人類駕駛行為的經驗知識,筆者基于試驗和熟練駕駛員日常經驗,制定了49條“IF-THEN”規則,圖4為隸屬度函數,圖5為MATLAB中模糊規則的編輯器。表2是制定的模糊控制規則,如下:
Ri:IFeDisEiandφDisEci,THENθis Si
其中:Ei、Eci和Si分別為輸入變量eD、φD和輸出變量θ模糊子集的語言變量,{Ei,Eci,Si}∈{NB,NM,NS,ZO,PS,PM,PB}。

圖4 隸屬度函數Fig. 4 Membership function

圖5 規則制定Fig. 5 Rule making

uφDNBNMNSZOPSPMPBeDNBNBNBNMNMNSNSZONMNBNMNMNSNSZOPSNSNMNMNSNSZOPSPSZONMNSNSZOPSPSPMPSNSNSZOPSPSPMPMPMNSZOPSPSPMPMPBPBZOPSPSPMPMPBPB
2.2.4 模糊推理
筆者采用Mamdani的max-min合成法,具體步驟如下[14]:
把規則庫中的Ei、Eci和Si分別看作輸入變量eD、φD和輸出變量θ對應論域X、Y、Z上的詞集,可得如下的控制規則關系:
Ri=(Ei×Eci)×Si
Ri的隸屬函數為:
μRi(x,y,z)=μEi(x)∧μEci(y)∧μSi(z)
其中:?x∈X,?y∈Y,?z∈Z
R的隸屬度函數為:
當輸入變量eD、φD分別取模糊集E、Ec時,控制量為:
S=(E×Ec)°R
因此,S的隸屬度為:
2.2.5 解模糊化
上述模糊推理得到的是模糊值,必須通過解模糊轉化為實際控制值輸出。解模糊化是將模糊控制量轉化為精確量,然后乘以比例因子轉化為實際的控制量。筆者選用centroid法(面積中心法)進行解模糊,求得反映控制量的真實值[15-16]。
如果已知橫向誤差eD及橫擺角偏差φD,則先通過量化因子k1和k2將其范圍限定在模糊論域內,將其模糊化,再通過解模糊得到模糊控制器的輸出值,如表3。
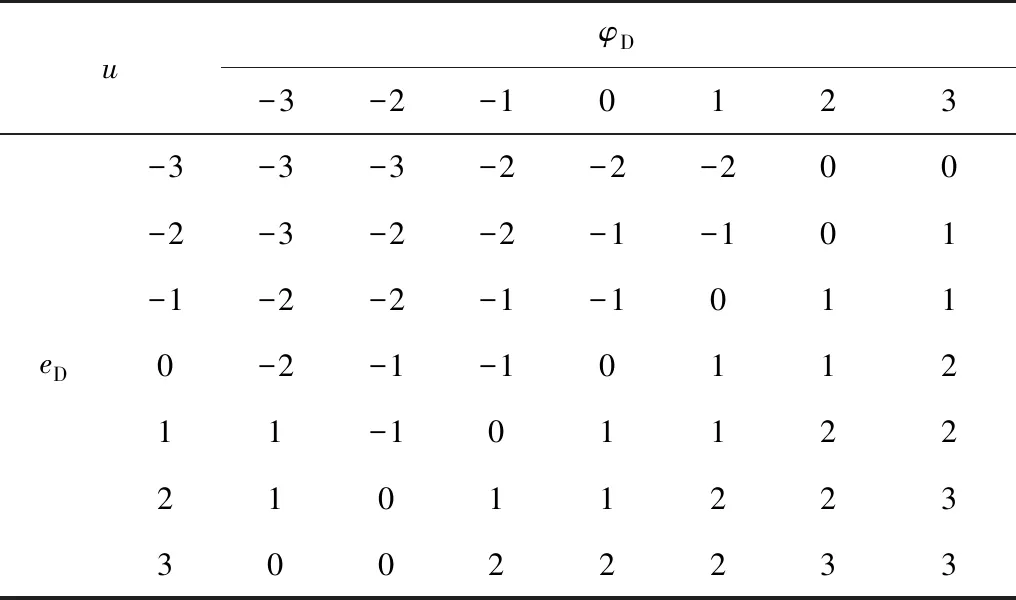
表3 模糊控制Table 3 Fuzzy control
經過上述步驟,基于MTALAB完成了筆者所需的模糊控制器設計,模糊控制系統結構如圖6。

圖6 模糊控制系統結構Fig. 6 Fuzzy control system structure
3 不同工況的仿真研究
通過Carsim和MATLAB進行聯合仿真,通過觀察車輛在不同車速下沿著期望軌跡的行駛狀況,以驗證所設計控制器的有效性。
3.1 仿真道路曲率
仿真路徑曲率如圖7。

圖7 道路曲率Fig. 7 Road curvature map
開始時路徑為直線以便監測橫向控制器循跡的性能;然后,從100 m路段開始,路徑由兩段方向相反的弧線組成,用來分析控制器循跡彎道的性能;隨后,是一段曲率為零的路段;最后經過一段曲率變化較大的弧線段,以檢驗控制器在急速轉彎時的性能。
考慮到速度對車輛橫向控制有重要影響,筆者選取30 km/h作為低速工況下的測試速度,高速工況選擇60 km/h作為測試速度,分別以上述速度進行仿真實驗。
3.2 低速工況的仿真
起始工況:θ=-3°,v=30 km/h,以車輛橫向誤差、橫擺角偏差、橫向加速度以及前輪轉角作為觀測量,得到如下仿真曲線,見圖8。

圖8 速度為30 km/h時的仿真曲線Fig. 8 The simulation curve when the speed is 30 km/h
由圖8(a)可知:最大穩態誤差發生在曲率為-0.001 5 m-1路段,曲線最大穩態誤差為-0.025 m,響應速度較快;由圖8(b)可知:模糊控制器可將橫擺角偏差控制在一定范圍內,超調量和振蕩較小,最大橫擺角偏差不超過1°;由圖8(c)知:在速度較低時,即使在路徑曲率快速變化的惡劣工況下,模糊控制器仍然可以控制車輛在一定的舒適度范圍之內,橫向加速度最大不超過0.025 m/s2;由圖8(d)可知:模糊控制器可保證前輪轉角平滑輸出且穩定性較高,最大前輪轉角不超過3°;由圖8(e)可知:在低速工況下,車輛橫擺角速度變化不大,最大橫擺角速度不超過10 deg/s,超調量較小;由圖8(f)可知:質心側偏角變化趨勢較為平緩,最大側偏角不超過3 deg,沒有局部振蕩的現象發生。
3.3 高速工況的仿真
初始狀態:θ=-3°,v=60 km/h。同樣以車輛橫向誤差、橫擺角偏差、橫向加速度以及前輪轉角作為觀測量,得到如下仿真曲線,見圖9。

圖9 速度為60 km/h時的仿真曲線Fig. 9 The simulation curve when the speed is 60 km/h
由圖9(a)可知:曲率為0.015-1處路段車輛的穩態誤差最大,最大穩態誤差為0.1 m;由圖9(b)可知:模糊控制器調節橫擺角偏差的時間短,且控制精度較高,最大橫擺角偏差不超過1.25°;由圖9(c)可知:在初始糾正偏差和曲率快速變化的階段,車輛的橫向加速度較大,但模糊控制器的振蕩較小,有較好的乘坐舒適性;由圖9(d)可知:控制輸出量的振蕩較小,前輪轉向角最大為不超過4″。由圖9(e)可知:雖有部分振蕩現象發生,但車輛橫擺角整體變化幅度較小,其幅值仍未超出10 deg/s,車輛沒有失去穩定性;由圖9(f)可知:在模糊控制器的作用下,質心側偏角保持在±3 deg范圍內,并且沒有急速驟變的情況發生,能夠保證車輛的穩定性。
綜上所述,筆者設計的模糊控制器具備較好的動態響應特性和循跡精度,在車輛循跡曲率變化工況下,系統響應較快,能夠準確的跟隨目標軌跡,而且穩態誤差不隨道路曲率變化而發生較大的起伏,具備一定抗干擾能力。
4 結 語
筆者建立了車輛二自由度單軌模型,考慮到車輛橫向控制為非線性的時變復雜過程,將駕駛員實際經驗與模糊控制理論相結合,設計了車輛橫向模糊控制器。經過理論分析以及模擬仿真,車輛的橫向誤差、橫擺角偏差等參數在一定范圍之內,仿真結果表明:在一定速度范圍內,無論是直線路段還是彎道,設計的模糊控制器均能夠使車輛平穩快速的跟隨目標軌跡行駛。
