基于雙環軌跡跟蹤控制的移動機器人控制器設計
2019-07-01 03:40:34周力夏愉樂唐慧
科技創新與應用 2019年18期
關鍵詞:移動機器人
周力 夏愉樂 唐慧

摘 ?要:為實現穩定的內環滑膜控制,通過調整內外環控制增益系數,使其內環收斂速度遠大于外環的收斂速度,即通過姿態角度θ快速跟蹤θd使閉環系統的穩定得以實現。控制仿真結果表明該方法是一種可行、有效的尋優方法,這一控制方式使移動機器人系統具有良好的跟蹤性能。
關鍵詞:移動機器人;雙閉環控制;軌跡跟蹤;滑膜控制
中圖分類號:TP242 文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2019)18-0022-03
Abstract: In order to realize the stable inner loop synovial control, by adjusting the gain coefficient of the inner loop control, the convergence rate of the inner loop is much faster than that of the outer loop, that is, the stability of the closed loop system can be realized by quickly tracking θd through the attitude angleθ. The control simulation results show that the method is a feasible and effective optimization method, and this control method makes the mobile robot system have good tracking performance.
Keywords: mobile robot; double closed loop control; trajectory tracking; synovial control
1 概述
移動機器人是一種具有自規劃、自組織以及自適應能力的機器人,能夠自主進行感知、動態決策與規劃、行為控制與執行。其廣泛應用于完成一些危險性較大的工作,如宇宙探測、海洋開發、無人駕駛和原子能等領域。此外,在工業、農業、醫療與服務業也有著廣泛的應用前景[1-2]。本文所研究的控制系統是由內、外環構成的閉環系統,內環為姿態子系統,外環為位置子系統。通過外環產生的指令信號θd傳遞給內環,而內環通過滑模控制規律對外環產生的中間指令進行跟蹤。
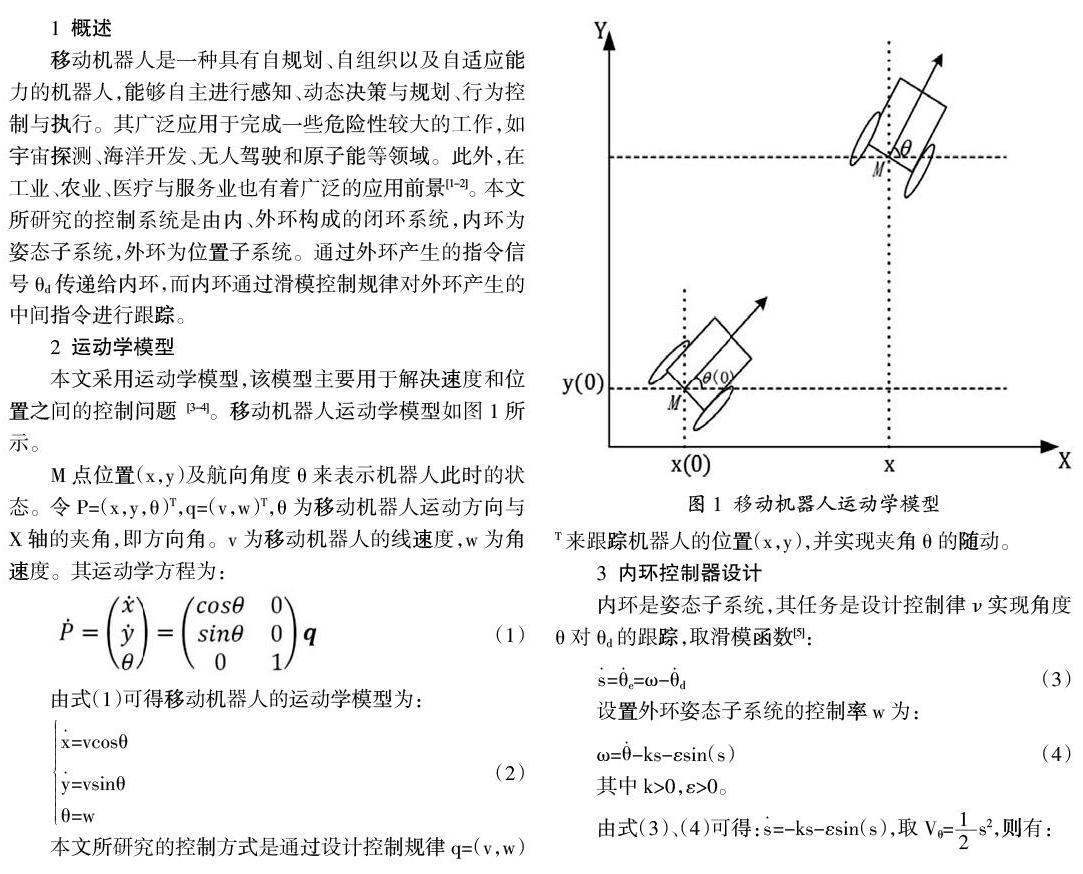
2 運動學模型
6 結束語
本文針對移動機器人設計的雙環軌跡跟蹤控制器,使其能迅速對移動機器人的位置及航向進行跟蹤,仿真結果表明,這一控制方式使移動機器人系統具有良好的跟蹤性能。
參考文獻:
[1]張啟彬,王鵬,陳宗海.基于速度空間的移動機器人同時避障和軌跡跟蹤方法[J].控制與決策,2017,32(2):358-362.
[2]劉國榮,張揚名.移動機器人軌跡跟蹤的模糊PID-P型迭代學習控制[J].電子學報,2013,41(8):1536-1541.
[3]高峰.機器人跟蹤控制方法分析與研究[J].科學中國人,2017(4Z):21-21.
[4]駱德淵,劉榮,李紀文.采用模糊邏輯的移動機器人軌跡跟蹤[J].電子科技大學學報,2008,37(6):943-946.
[5]Sarkar S, Kar I N. Formation of multiple groups of mobile robots using sliding mode control[C]// Decision & Control. 2016.
[6]任國華.移動機器人軌跡跟蹤與運動控制[J].機械設計與制造,2014(3):100-102.
[7]吳衛國,陳輝堂,王月娟.移動機器人的全局軌跡跟蹤控制[J].自動化學報,2001,27(03):326-331.
[8]Yazdjerdi P, Meskin N. Fault tolerant control of differential drive mobile robots using sliding mode controller[C]// 2017 5th International Conference on Control, Instrumentation, and Automation (ICCIA). 2018.
[9]徐俊艷,張培仁.非完整輪式移動機器人軌跡跟蹤控制研究[J].中國科學技術大學學報,2004,34(3).
[10]馮劍,張文安,倪洪杰,等.輪式移動機器人軌跡跟蹤的PID控制方法[J].信息與控制,2017,46(4):385-393.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19