負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷
2019-07-02 07:17:30吳文軍張晉瑞
微特電機(jī) 2019年6期
關(guān)鍵詞:故障
吳文軍,張晉瑞,尚 儀
(1.國網(wǎng)四川省電力公司天府新區(qū)供電公司,成都 610041; 2.東北師范大學(xué),長春 130024)
0 引 言
感應(yīng)電動機(jī)是工農(nóng)業(yè)生產(chǎn)中重要的旋轉(zhuǎn)設(shè)備,但是其發(fā)生轉(zhuǎn)子斷條或端環(huán)開裂的概率卻仍然高達(dá)10%左右。對感應(yīng)電動機(jī)轉(zhuǎn)子故障進(jìn)行及時有效的檢測顯得尤為重要[1]。目前,恒定負(fù)載感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障檢測方法已取得良好的成果,并在工業(yè)實際中有了成功的應(yīng)用。
基于定子電流特性分析(以下簡稱MCSA)是較為常用的感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障檢測方法[2]。當(dāng)感應(yīng)電動機(jī)定子電流頻譜中出現(xiàn)大小為(1±2s)f1的頻率分量(f1為供電頻率,即定子電流基頻分量,s為轉(zhuǎn)差率)時,電機(jī)則發(fā)生轉(zhuǎn)子斷條故障,因此在判斷轉(zhuǎn)子斷條故障時可以以該邊頻分量作為特征頻率[3]。如快速傅里葉變換(以下簡稱FFT)及其變形(如Zoom FFT)[4]是最為常用的電流特性分析方法[5]。
為了克服FFT存在的頻譜泄露、頻率分辨不夠等固有局限,基于譜估計的轉(zhuǎn)子斷條故障檢測方法也被成功引入。目前已經(jīng)成功應(yīng)用于感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障檢測且取得良好效果的新興頻譜分析算法包括:多重信號分類算法(以下簡稱MUSIC)[6-8]、旋轉(zhuǎn)不變參數(shù)估計技術(shù)(以下簡稱ESPRIT)[9-10]、Prony方法[11]等。MUSIC作為現(xiàn)代譜估計技術(shù),相比于FFT,即使對于短時數(shù)據(jù)情況,MUSIC仍然能夠保持較高的頻率分辨率,而對于信號的幅值和相位參數(shù),MUSIC通常借助模擬退火算法[12]、遺傳算法[13]和模式搜索算法[14]等智能優(yōu)化算法進(jìn)行估計。同理,ESPRIT同樣具有較好的頻率分辨率,可是對于幅值和相位參數(shù)估計精度較差,故通常也將該方法與智能優(yōu)化算法相結(jié)合[15]。Prony方法可以同時檢測信號的頻率、幅值和相位角,是一種理想的故障檢測方法。
為了更好地凸顯故障特征,定子電流變換方法也被成功用于轉(zhuǎn)子斷條故障檢測之中。如Park變換及Park矢量模平方函數(shù)[16]、Hilbert模量等電流變換形式[17];不僅如此,瞬時有功(無功)功率也得到了應(yīng)用[18]。這類方法不同于傳統(tǒng)的基于MCSA方法,它們均是通過對定子電流的變形、坐標(biāo)變換或者同時利用電壓電流信號進(jìn)行特征故障檢測的。這類方法有一個共同的特點:可以有效地使故障特征頻率(1±2s)f1遠(yuǎn)離基頻分量f1,從而避免被淹沒或者頻譜泄露。不僅如此,當(dāng)定子電壓電流信號經(jīng)過這些方法處理之后往往可以將基頻分量轉(zhuǎn)化為直流成分,再經(jīng)過一定的處理便可以濾除直流成分,凸顯故障特征,提高故障檢測能力。
由以上分析可知,對于恒定負(fù)載下的感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障檢測方法已有較為成熟的研究。但是,以上方法并未考慮負(fù)載波動的情況。當(dāng)電機(jī)拖動負(fù)載表現(xiàn)為一個恒定負(fù)載轉(zhuǎn)矩和一個單一確定頻率成分的波動負(fù)載轉(zhuǎn)矩疊加而成時,此種情況稱為負(fù)載波動。當(dāng)負(fù)載波動的頻率為fL時,會在定子電流頻譜中疊加一個大小為(f1±fL)的頻率成分,當(dāng)其與斷條故障特征頻率(1±2s)f1接近時,負(fù)載波動可能會對轉(zhuǎn)子斷條故障檢測引起誤判。為了提高感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障檢測可靠性,須將其與負(fù)載波動進(jìn)行有效區(qū)分。
研究表明,轉(zhuǎn)子斷條故障和負(fù)載波動在瞬時有功(無功)功率的表現(xiàn)是不同的[19]:轉(zhuǎn)子斷條故障和負(fù)載波動均會在瞬時有功功率(以下簡稱IAP)調(diào)制出大小分別為2sf1,fL的頻率成分,但是幅值則表現(xiàn)為后者遠(yuǎn)大于前者;同理,在瞬時無功功率(以下簡稱IRP)同樣存在大小分別為2sf1,fL的頻率成分,但是幅值為前者遠(yuǎn)大于后者[20-21]。據(jù)此,便可以對轉(zhuǎn)子斷條故障與負(fù)載波動進(jìn)行有效的區(qū)分。文獻(xiàn)[19]的方法雖然可以對轉(zhuǎn)子斷條故障與負(fù)載波動進(jìn)行區(qū)分,但是當(dāng)二者同時存在且2sf1,fL極其接近甚至相同時,現(xiàn)有的頻譜分析技術(shù)是無法將二者進(jìn)行區(qū)分的;文獻(xiàn)[21]在回顧與拓展了轉(zhuǎn)子斷條故障與負(fù)載波動識別方法的理論基礎(chǔ),給出了明確的診斷判據(jù),但是該方法亦是建立在頻譜分析的基礎(chǔ)上(這對頻譜分析技術(shù)要求較高),且未考慮2sf1,fL相同的情況。
不僅如此,以上方法只是涉及到如何對負(fù)載波動與斷條故障進(jìn)行有效檢測與區(qū)分,并未考慮提取故障特征之后的狀態(tài)識別問題。目前常用的分類算法有人工神經(jīng)網(wǎng)絡(luò)(以下簡稱ANN)[22]、支持向量機(jī)(以下簡稱SVM)[23]和隨機(jī)森林(以下簡稱RF)[24]等。ANN和SVM均為單一分類器,其分類正確率還有待進(jìn)一步提高。而RF屬于集成分類器,其具有分類速度快、正確率高的特點。
基于此,本文針對負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障特征提取和狀態(tài)識別問題,提出了基于瞬時功率與離散小波相結(jié)合的故障特征提取方法,并給出了明確的小波判據(jù);然后構(gòu)建了以RF為基分類器的集成分類器,從而實現(xiàn)對負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障的準(zhǔn)確有效診斷。
1 負(fù)載波動下斷條故障特征及問題分析
1.1 恒定負(fù)載下斷條故障特征分析
當(dāng)感應(yīng)電動機(jī)出現(xiàn)斷條故障時將在定子電流中產(chǎn)生一個頻率為(1-2s)f1的邊頻分量。該邊頻分量將導(dǎo)致定子電流幅值出現(xiàn)周期性變化,進(jìn)而反作用到轉(zhuǎn)子上,產(chǎn)生一個兩倍轉(zhuǎn)差率的力矩。又因為轉(zhuǎn)子的轉(zhuǎn)動慣量不可能無限大,故該兩倍轉(zhuǎn)差率的力矩就會對轉(zhuǎn)子的速度產(chǎn)生擾動。速度的擾動一方面會降低(1-2s)f1的下邊頻分量擺動幅度;另一方面會產(chǎn)生一個(1+2s)f1的上邊頻分量。
圖1為恒定負(fù)載下感應(yīng)電動機(jī)定子電流及其FFT頻譜圖。由圖1可知,恒定負(fù)載先感應(yīng)電動機(jī)發(fā)生轉(zhuǎn)子斷條故障時將在定子電流頻譜中疊加兩個頻率大小為(1±2s)f1的邊頻分量,以此作為斷條故障特征。
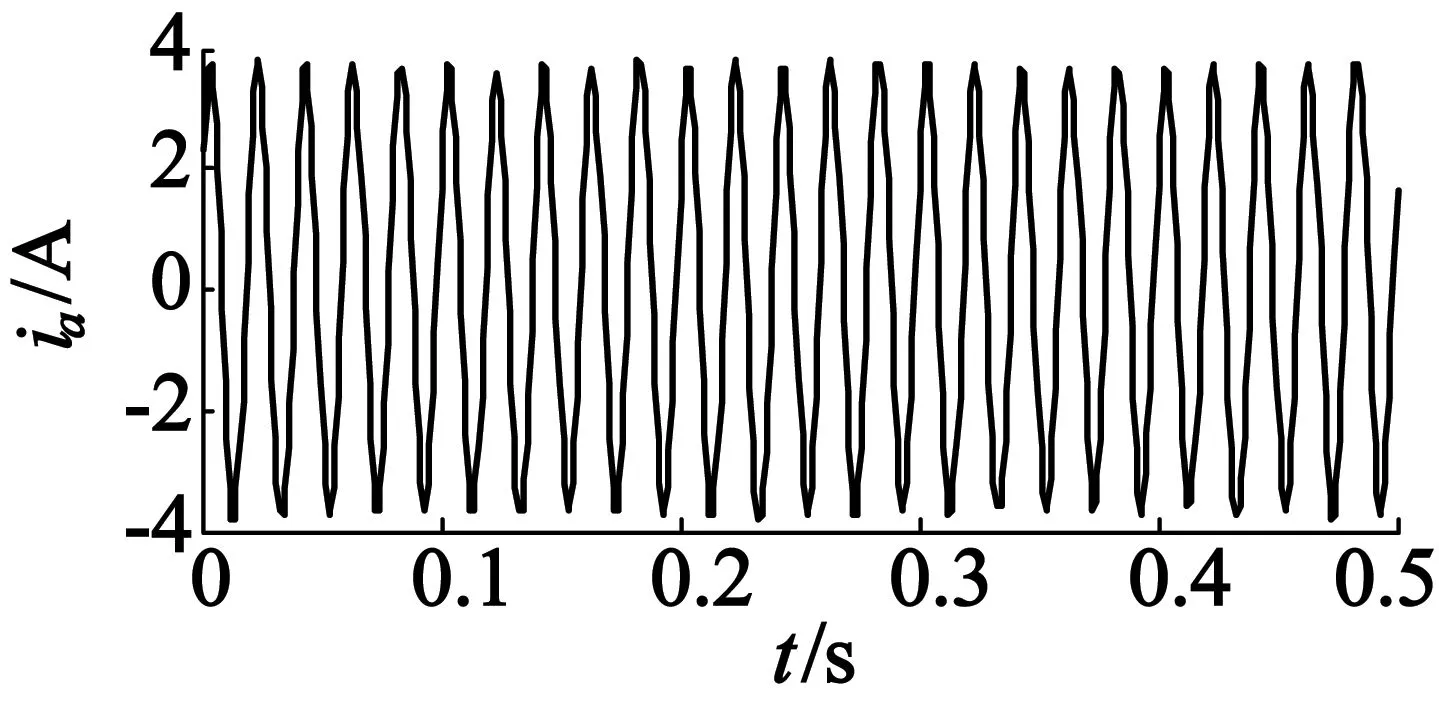
(a) 定子電流
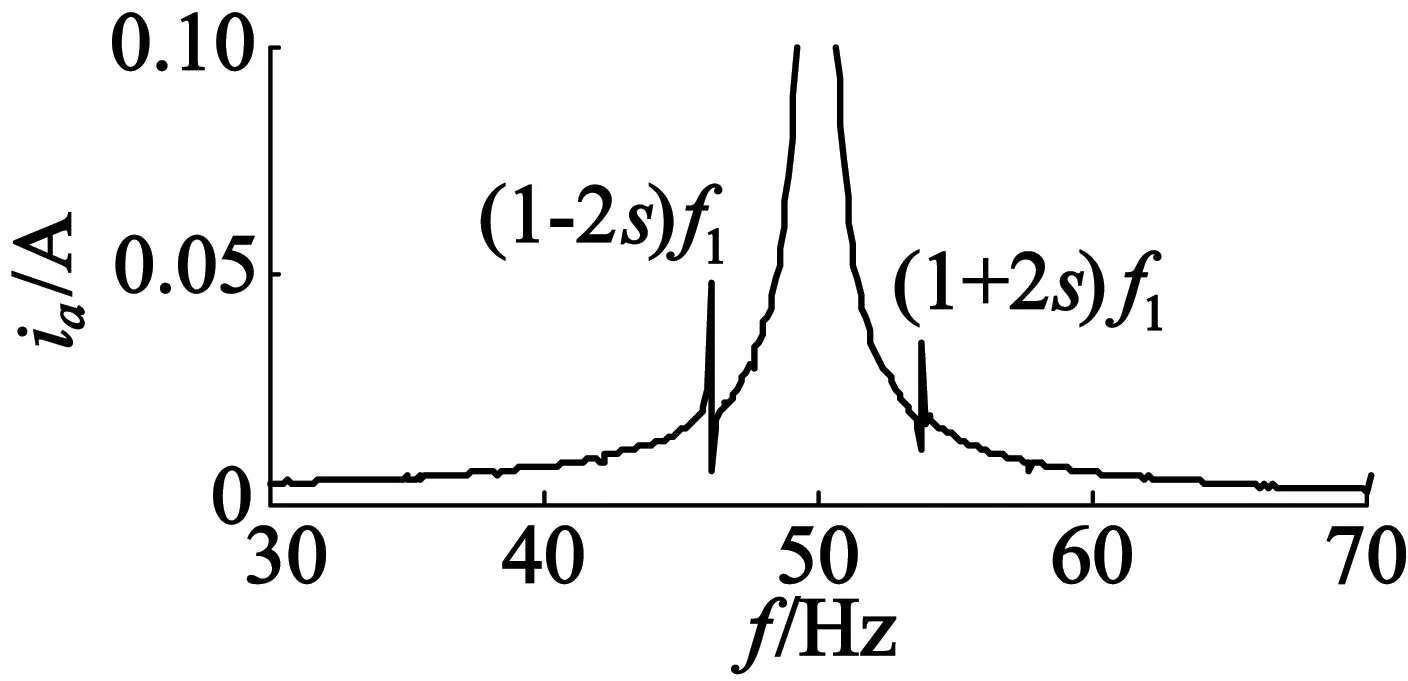
(b) 定子電流頻譜
1.2 波動負(fù)載下斷條故障特征分析
此處的波動負(fù)載為一個恒定負(fù)載轉(zhuǎn)矩和一個單一確定頻率成分的波動負(fù)載轉(zhuǎn)矩疊加而成,表達(dá)式如下:
Tload=Tavg+ηTavgcos(2πfL)
式中:Tavg為恒定負(fù)載轉(zhuǎn)矩;η為反映負(fù)載波動水平的系數(shù);fL為波動頻率。
當(dāng)電動機(jī)負(fù)載轉(zhuǎn)矩以頻率fL進(jìn)行波動時,電機(jī)的轉(zhuǎn)速ωr和電磁轉(zhuǎn)矩Te都將以同樣的頻率fL進(jìn)行波動。同轉(zhuǎn)子斷條故障一樣,由負(fù)載波動引起的轉(zhuǎn)速波動也將影響定子繞組中的感應(yīng)電動勢,從而會在定子電流上疊加兩個頻率為f1±fL的電流成分,故當(dāng)fL與2sf1極其接近時,負(fù)載的波動容易干擾轉(zhuǎn)子斷條故障特征頻率的檢測。
圖2為負(fù)載波動下感應(yīng)電動機(jī)定子電流及其FFT頻譜圖。由圖2可知,當(dāng)電動機(jī)出現(xiàn)轉(zhuǎn)子斷條故障時,定子電流頻譜中會存在故障特征分量(1±2s)f1。但是當(dāng)電機(jī)的負(fù)載呈現(xiàn)波動性質(zhì)時會對定子電流進(jìn)行一定的調(diào)制,從而導(dǎo)致在定子電流頻譜分析時也出現(xiàn)邊頻分量f1±fL,從而混淆斷條故障。
通過對負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障特征分析,我們可以發(fā)現(xiàn),當(dāng)負(fù)載呈現(xiàn)波動性質(zhì)時,波動特征頻率會混淆斷條故障特征,需將二者進(jìn)行有效區(qū)分。
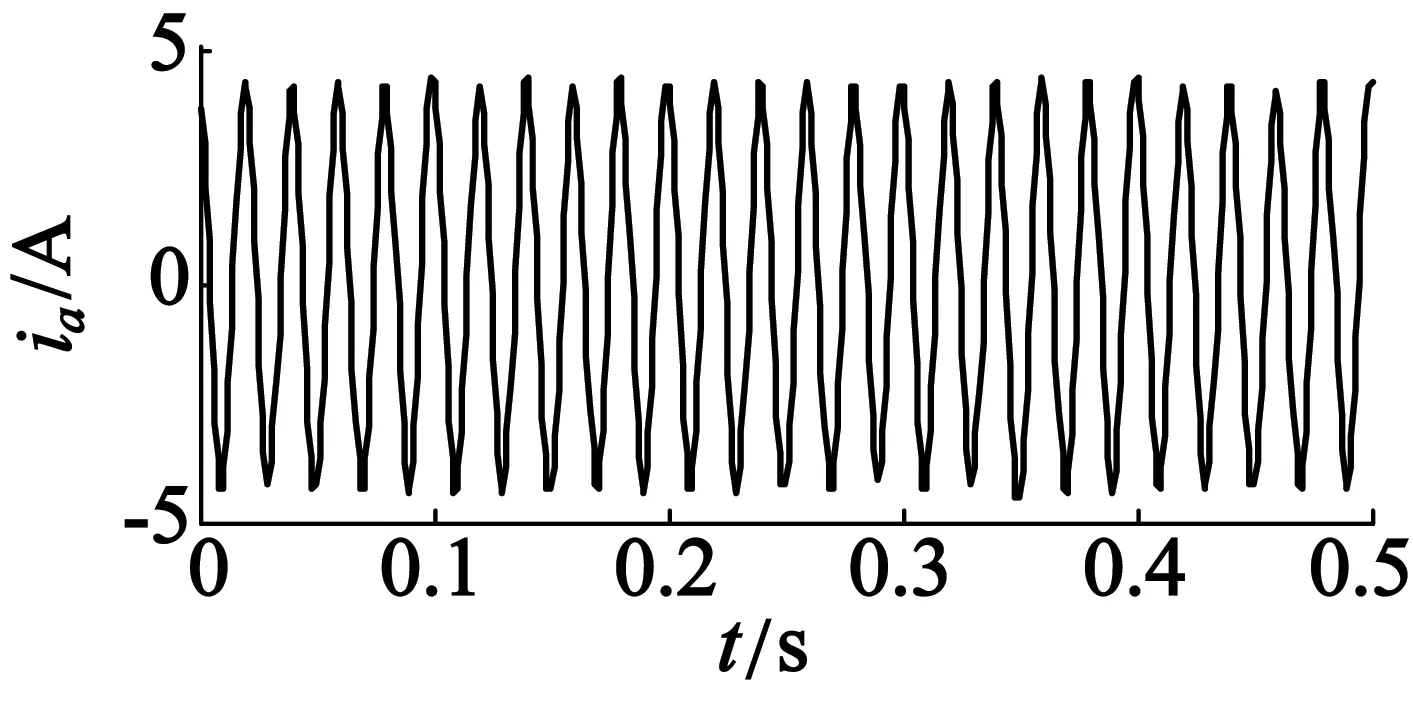
(a) 定子電流
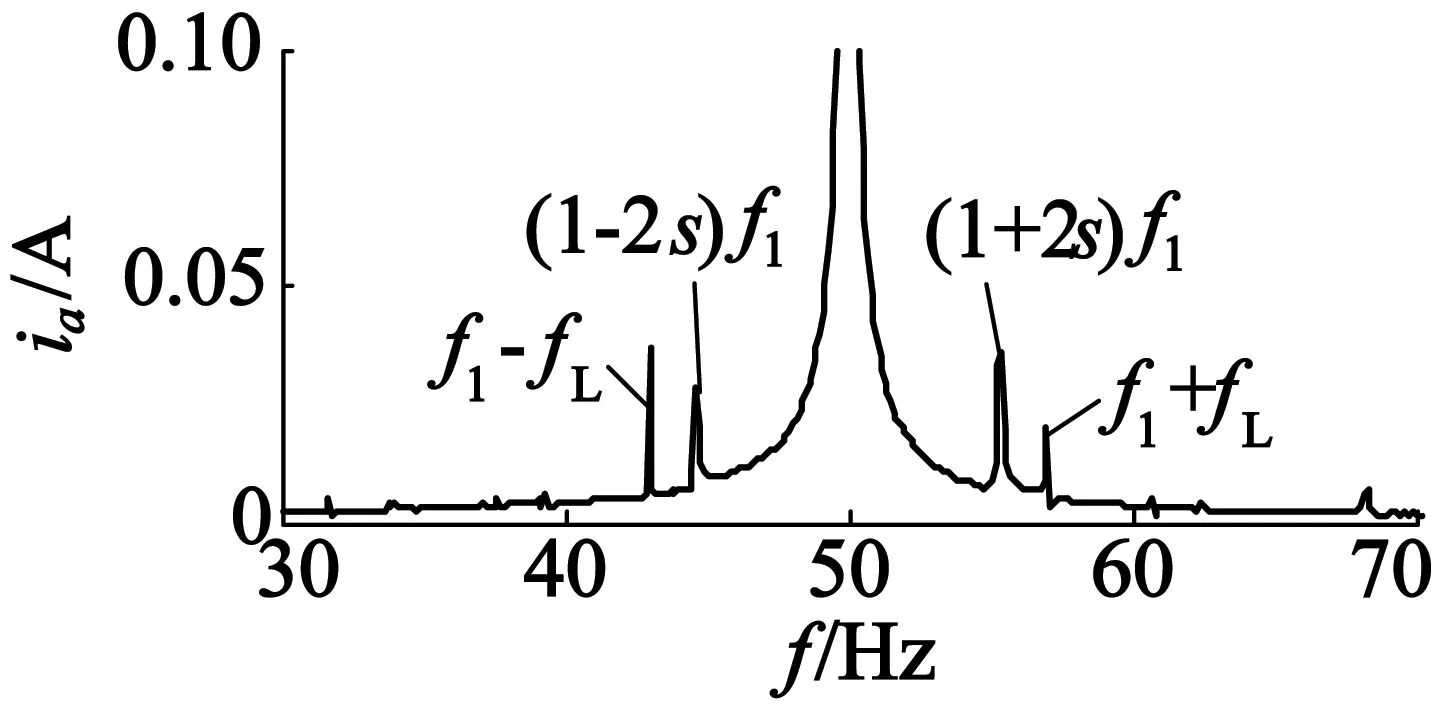
(b) 定子電流頻譜
2 基于瞬時功率與離散小波的故障特征提取及新判據(jù)
2.1 恒定負(fù)載下斷條故障電機(jī)瞬時功率
感應(yīng)電動機(jī)定子電壓經(jīng)過Hilbert轉(zhuǎn)化為復(fù)空間矢量后有如下表達(dá)式:
(1)
同理,對于感應(yīng)電動機(jī)斷條故障時定子一相電流的復(fù)空間矢量表達(dá)式如下:
(2)

那么,感應(yīng)電動機(jī)的瞬時有功、無功功率表達(dá)式[21]:
(3)
經(jīng)過進(jìn)一步推導(dǎo),瞬時有功、無功功率可表示如下:
p(t)=3VIcosφ-3V[I1-2s-I2sbsinαs]·
sin[2π(2sf1)t+αT]≈3VIcosφ
(4)
cos[2π(2sf1)t+αT+ξ]
(5)

由式(4)、式(5)可知,恒定負(fù)載下,感應(yīng)電動機(jī)出現(xiàn)轉(zhuǎn)子斷條故障時,故障特征頻率成分2sf1主要在IRP中體現(xiàn),其幅值遠(yuǎn)大于2sf1在IAP中的幅值。
2.2 波動負(fù)載下斷條故障電機(jī)瞬時功率
當(dāng)感應(yīng)電動機(jī)同時存在轉(zhuǎn)子斷條故障與負(fù)載波動時,定子電壓仍然如式(1),而電流的復(fù)空間矢量如下:
(6)
那么,感應(yīng)電動機(jī)的瞬時有功、無功功率表達(dá)式如下:
p(t)=3VIcosφ-3V(I1-2s-I2sbsinαs)·
sin[2π(2sf1)t+αT]+3VIlobsinαs·
sin(2πfLt+αT+δ)≈3VIcosφ-
3V(I1-2s-I2sb)sin[2π(2sf1)t+αT]+
3VIlobsin(2πfLt+αT+δ)≈3VIcosφ+
3VIlobsin(2πfLt+αT+δ)
(7)

cos[2π(2sf1)t+αT+ξ]-3VIlob·
cosαssin (2πfLt+αT+δ)≈
3VIsinφ+3VI1-2s·
cos[2π(2sf1)t+αT+ξ]
(8)
由式(7)、式(8)可知,IAP中主要含有負(fù)載波動頻率成分fL,其幅值大小主要由負(fù)載波動決定;IRP中主要含有斷條故障特征頻率成分2sf1,其幅值大小主要取決于轉(zhuǎn)子斷條故障。
因此,針對負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障檢測問題,只需要通過對IAP和IRP進(jìn)行頻譜分析,便可以將二者進(jìn)行區(qū)分。
通過以上分析可知,通過瞬時功率可以排除負(fù)載波動對轉(zhuǎn)子斷條故障檢測的影響,但是當(dāng)2sf1,fL極其接近甚至相等時,傳統(tǒng)的頻譜分析技術(shù)是無法實現(xiàn)準(zhǔn)確的故障檢測的。為此,進(jìn)一步引入離散小波變樣(以下簡稱DWT)方法,對負(fù)載波動下電機(jī)瞬時功率進(jìn)行頻段分解并提取能量,以解決以上問題。
2.3 基于DWT的故障特征提取及小波判據(jù)
DWT作為一種時頻分析工具,對非平穩(wěn)信號具有良好的處理能力,故可用于負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障時瞬時功率信號的處理。對于瞬時功率信號S,DWT將其分解為一個逼近信號al和一系列細(xì)節(jié)信號dj,其頻段如下式:
(9)
式中:fs為信號采樣頻率;l為小波分解層數(shù),取決于采樣頻率以及實際所需的頻段寬度;j=1,2,…,l。
對逼近信號與細(xì)節(jié)信號提取能量,如下式:
(10)
式中:Nl為第l層的數(shù)據(jù)長度。
由于轉(zhuǎn)子斷條故障、負(fù)載波動會在IAP以及IRP中表現(xiàn)不同,對瞬時功率進(jìn)行小波分解并提取頻段能量,那么特征頻率2sf1,fL所在頻段的能量值將較比其他頻段能量大。用Ep和Eq分別表示特征頻率2sf1,fL所在頻段的IAP和IRP小波能量幅值。負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷小波判據(jù)如表1所示。
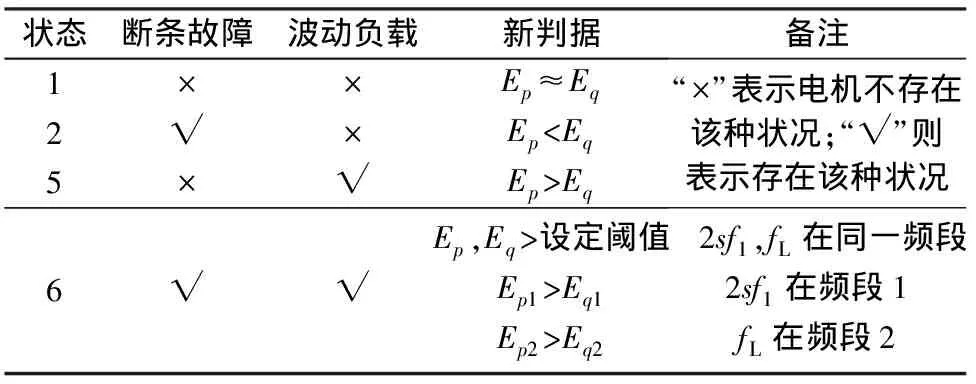
表1 變化負(fù)載下轉(zhuǎn)子斷條故障診斷小波判據(jù)
由表1可知,對于既存在斷條故障,又存在負(fù)載波動的情況,如果二者的特征頻率均分布在同一頻段,那么將出現(xiàn)Ep和Eq均偏大,且大于設(shè)定閾值的情況;如果2sf1,fL分布在不同頻段,那么2sf1所在頻段Ep
因此,通過結(jié)合瞬時功率與離散小波可有效提取負(fù)載波動下感應(yīng)電動機(jī)出現(xiàn)轉(zhuǎn)子斷條故障特征。
3 集成分類器
3.1 集成學(xué)習(xí)原理
集成學(xué)習(xí)(以下簡稱EL)是一種使用多個分類器來解決同一個問題并以此提高泛化能力的機(jī)器學(xué)習(xí)方法。圖3為集成學(xué)習(xí)原理。
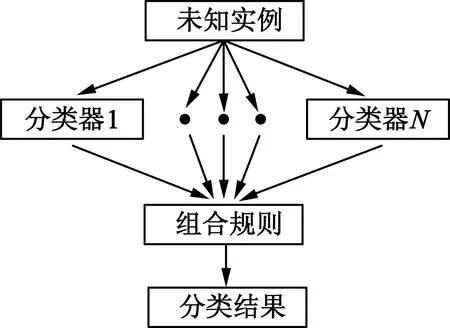
圖3 集成學(xué)習(xí)原理
圖3通過某種集成規(guī)則,將多個分類器集成起來,然后對一個未知實例進(jìn)行分類或者預(yù)測,從而取得比單個分類器更加優(yōu)良準(zhǔn)確的性能,其中的單一分類器叫做元分類器或者基分類器。集成學(xué)習(xí)好比是一個擁有多個決策者的組織機(jī)構(gòu),然后讓這個組織中的每個成員對同一件事物進(jìn)行集體決策。
3.2 基于RF的集成分類器
RF本身就是一種集成分類器,其所有的基分類器都是決策樹。RF是利用Bootstrap自助重采樣,通過有放回且無權(quán)重方式對原始數(shù)據(jù)進(jìn)行采樣,然后將采樣得到的不同數(shù)據(jù),創(chuàng)建對應(yīng)的不同決策樹,再利用各個決策樹對測試數(shù)據(jù)樣本進(jìn)行“投票表決”,最后將投票結(jié)果進(jìn)行組合,由此便得到最終的分類結(jié)果。
RF分類算法之所以能夠避免BP神經(jīng)網(wǎng)絡(luò)、SVM等分類算法的過擬合以及局部最優(yōu)等問題,是由于其采用了集成學(xué)習(xí)思想,同時也真實體現(xiàn)了“隨機(jī)性”。RF的流程如圖4所示。
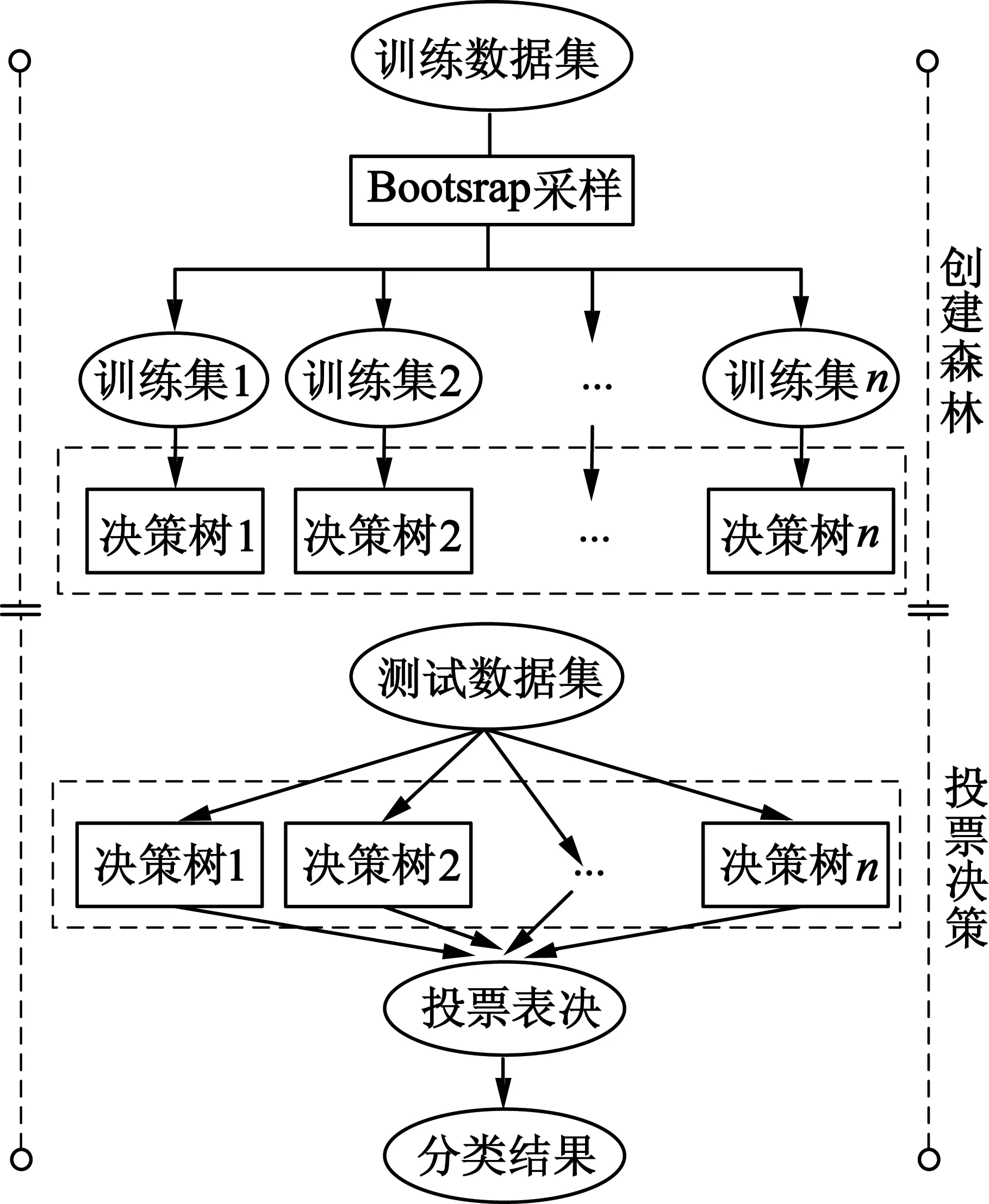
圖4 RF算法示意圖
以RF為基分類器且個數(shù)為3,組合規(guī)則為“投票”,那么基于RF的集成分類器結(jié)構(gòu)如圖5所示。
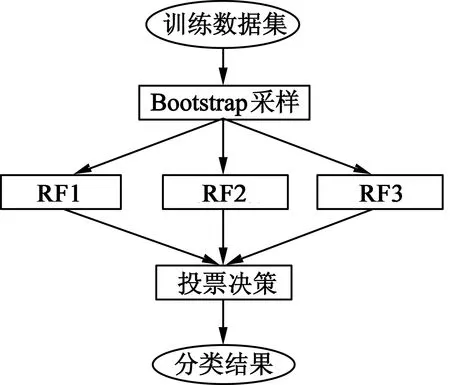
圖5 集成分類器示意圖
至此,便創(chuàng)建了負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷模型。由于集成分類器具有多個基分類器,因此在實際工程應(yīng)用中可以采用多個CPU并行計算,對多個基分類器進(jìn)行平行運(yùn)算,從而提高計算速度。
4 實驗驗證
4.1 故障診斷流程
負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷流程如下:
1) 采集感應(yīng)電動機(jī)一相定子電壓和電流,并進(jìn)行Hilbert變換,得到復(fù)空間矢量電壓vs和電流is;
2) 計算電機(jī)瞬時功率,并采用低通濾波器濾波得到IAP以及IRP;
3) 經(jīng)過雙Hilbert變換,濾除直流成分;
4) 對IAP,IRP分別進(jìn)行DWT分解并計算頻段能量,提取特征頻率所在頻段能量Ep和Eq;
5) 以Ep和Eq作為集成分類器輸入量訓(xùn)練集成分類器,形成故障診斷模型。
4.2 實驗平臺
實驗用電動機(jī)型號為Y90S-4,同步轉(zhuǎn)速為1 500 r/min,極對數(shù)為2。表2為電機(jī)的具體參數(shù)。

表2 實驗電動機(jī)主要技術(shù)參數(shù)
負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷實驗平臺如圖6所示。
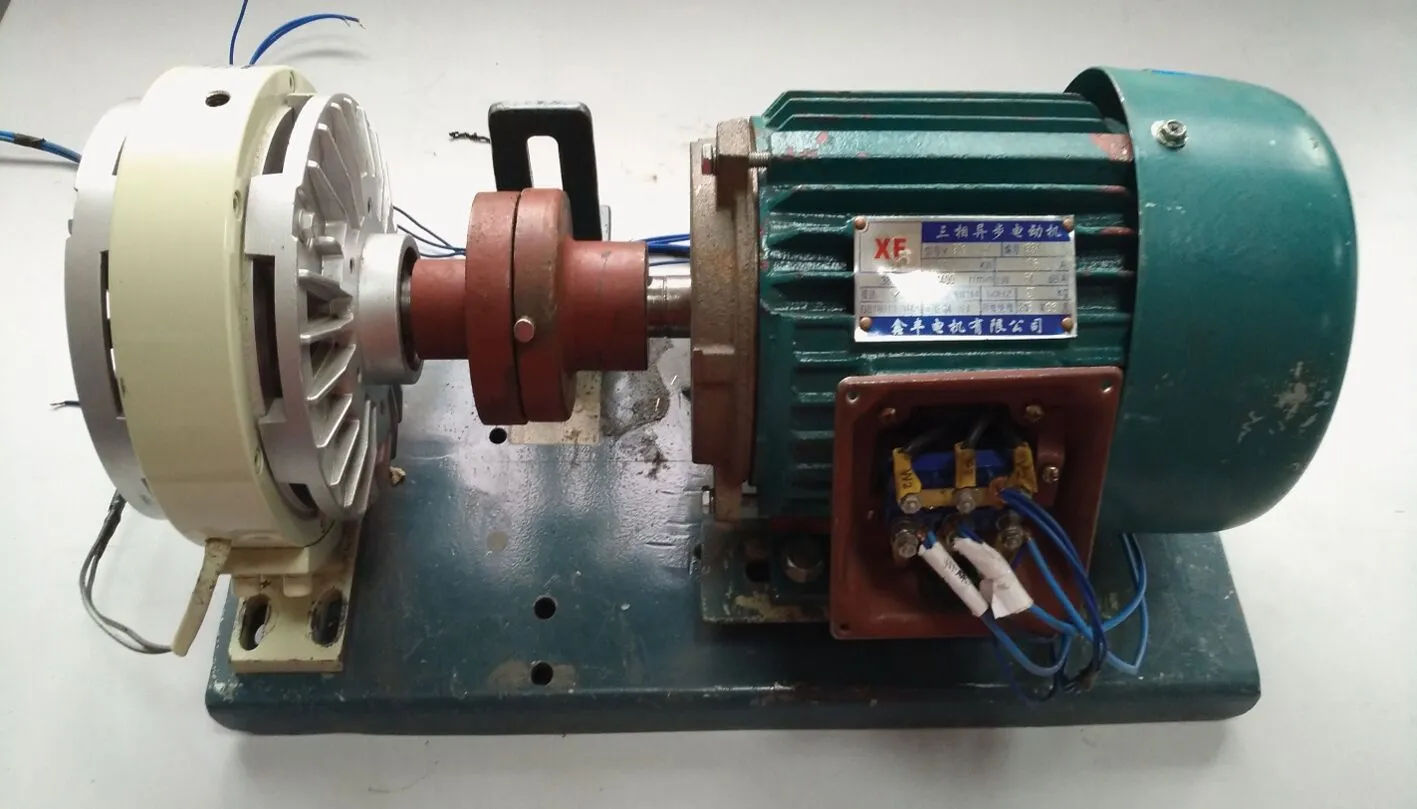
(a) 電動機(jī)及磁粉制動器

(b) 故障轉(zhuǎn)子
電動機(jī)拖動的負(fù)載為一臺機(jī)座式磁粉制動器,其型號為FZ25J,其額定轉(zhuǎn)矩為25 N·m,激磁線圈電壓為直流24 V,電流為2.0 A,許用轉(zhuǎn)速為1 500 r/min,冷卻方式采用自冷卻。
與磁粉制動器配套使用的為一臺張力控制器,其具有220 V交流輸入,24 V/36 V直流輸出,控制方式分為面板控制、外接PLC控制、外接電位器三種控制模式。通過改變控制器的控制信號便可以使磁粉制動器轉(zhuǎn)矩呈現(xiàn)恒定以及波動狀態(tài)。
恒定負(fù)載時,電動機(jī)為滿載狀態(tài);負(fù)載波動時,負(fù)載波動頻率fL為4.5 Hz,波動程度η為2%,此時2sf1約為4.8 Hz。
4.3 實驗過程及結(jié)果分析
在對電機(jī)提取瞬時功率后,我們進(jìn)一步采用DWT對各個狀態(tài)下IAP和IRP進(jìn)行頻段分解,并提取各頻段能量幅值。由于本文的實驗電動機(jī)從空載變化到滿載狀態(tài)時,其轉(zhuǎn)子速度變化的大致區(qū)間為[1 400,1 490]r/min,因此故障特征頻率2sf1的大致分布區(qū)間為[0,7]Hz。加之信號采樣頻率為1 000 Hz,因此本文采用db5小波進(jìn)行6層分解,并以逼近信號al∈[0,7.8]Hz所在頻段能量為故障檢測特征量(2sf1,fL均分布于此頻段)。
同時,為了凸顯故障特征,采用Butterworth低通濾波器對瞬時功率進(jìn)行濾波之后再進(jìn)行DWT分解。濾波器的截止頻率為10 Hz,階數(shù)為16。
圖7為恒定負(fù)載下斷條故障電機(jī)IAP,IRP的FFT頻譜圖。其中的直流分量已經(jīng)雙Hilbert變換濾除。電壓、電流的采樣頻率為1 kHz。Ap,Aq分別為無功功率和有功功率幅值。由圖7可知,IRP中斷條故障特征頻率2sf1的幅值明顯大于IAP中2sf1的幅值。
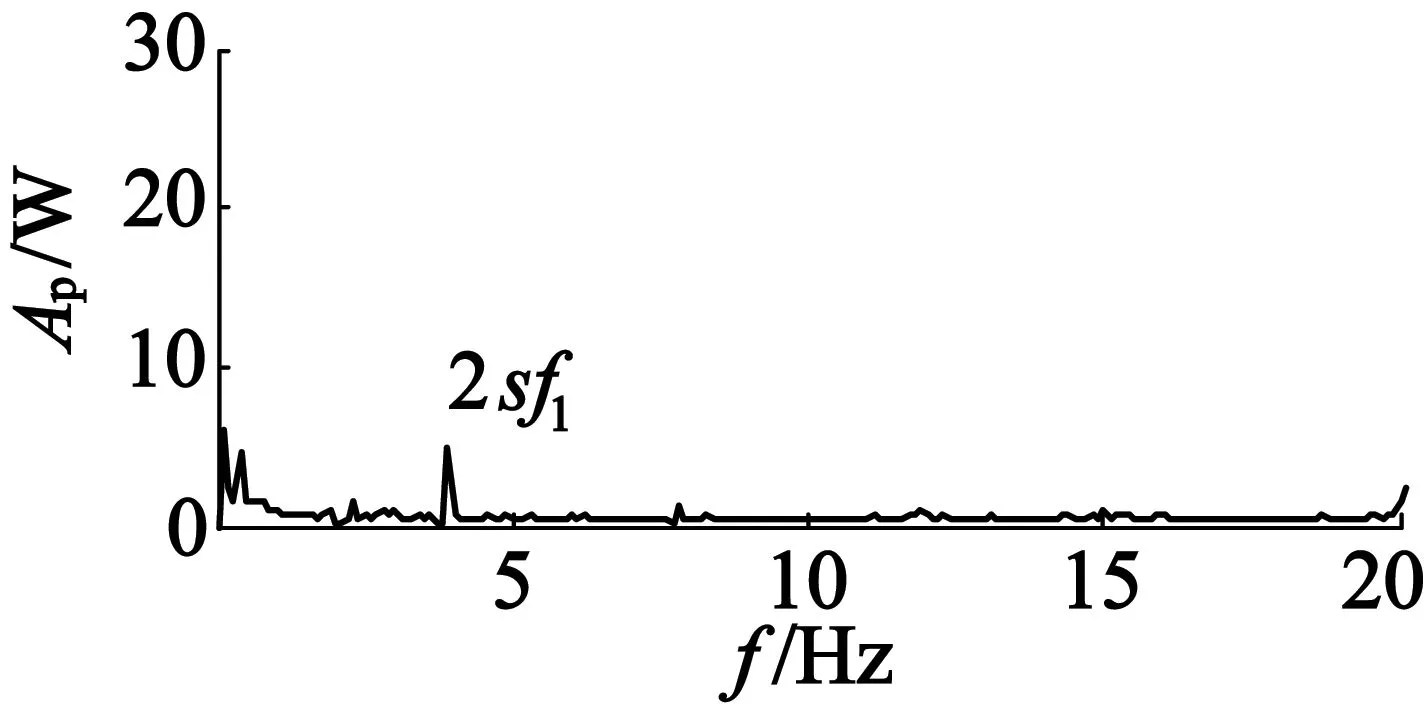
(a) 有功功率頻譜
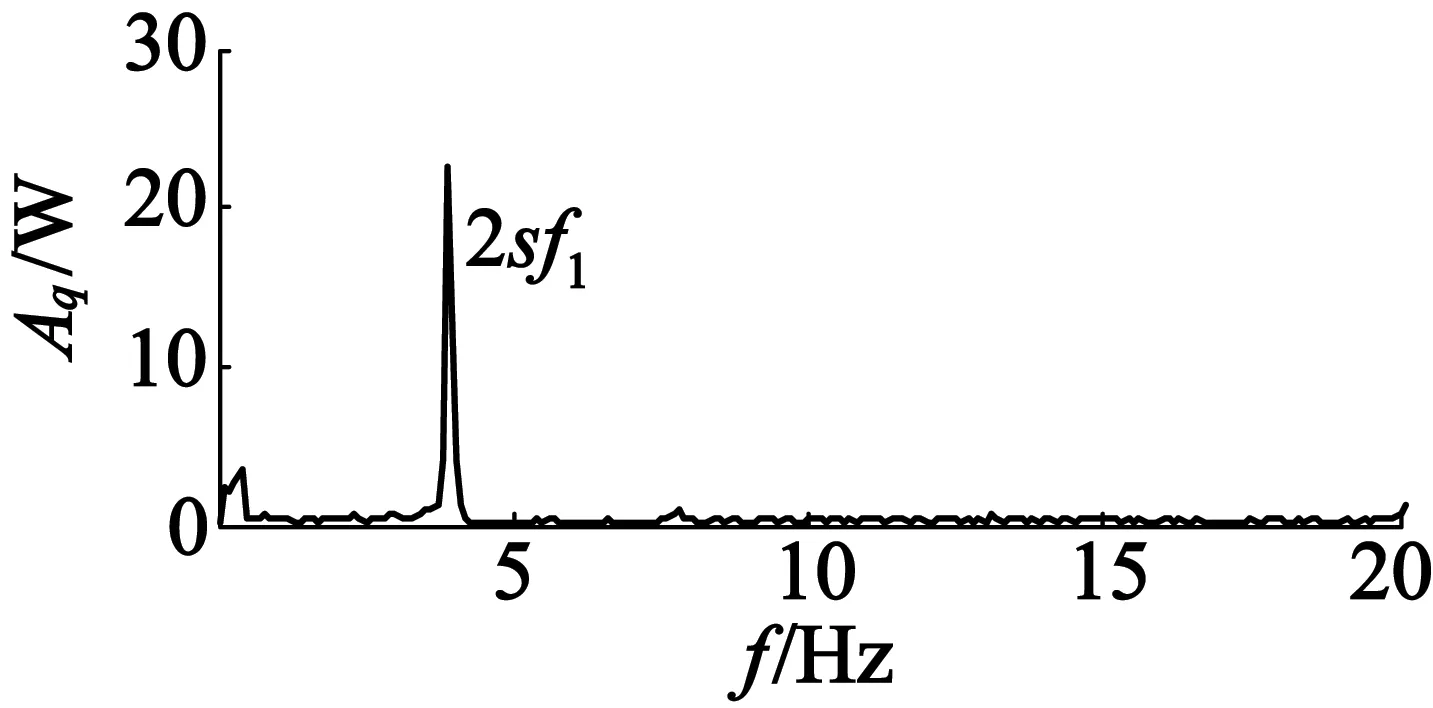
(b) 無功功率頻譜
圖8為負(fù)載波動下轉(zhuǎn)子斷條故障電機(jī)IAP,IRP頻譜圖。
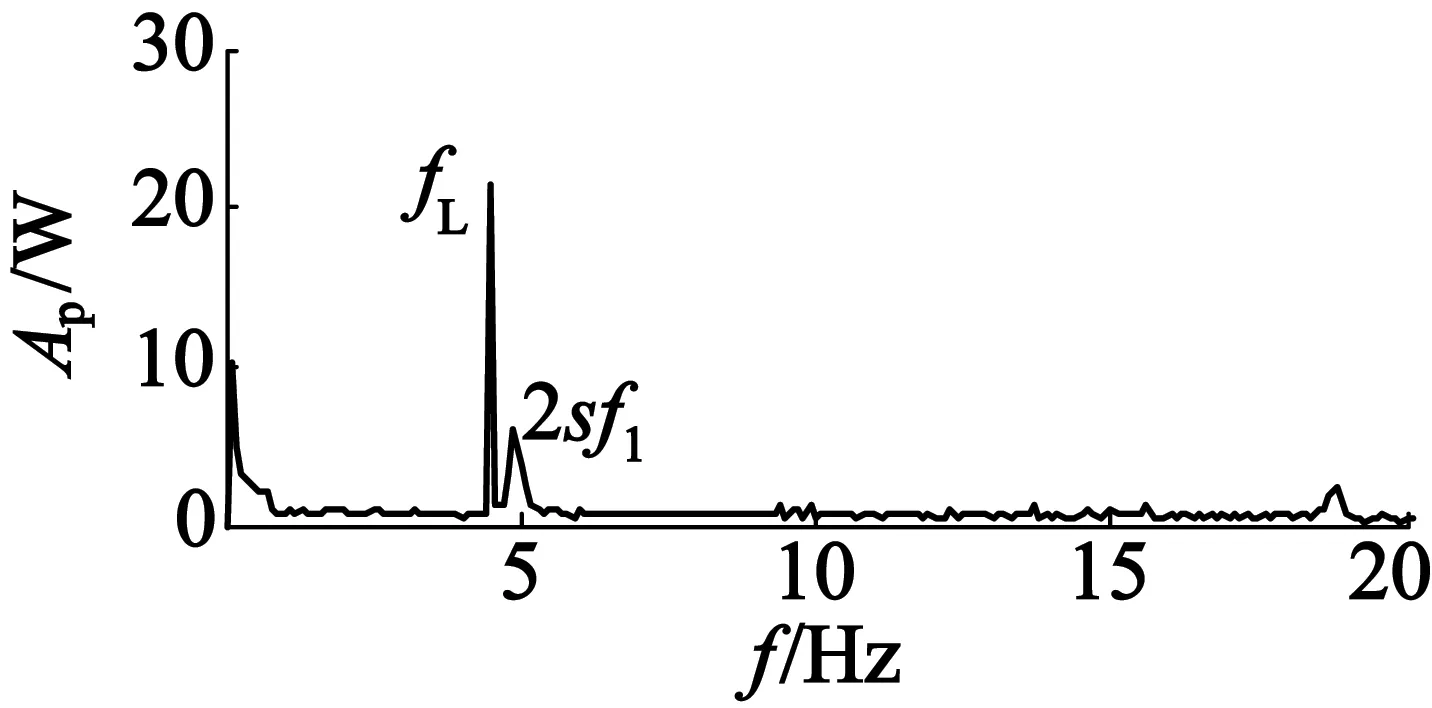
(a) 有功功率頻譜
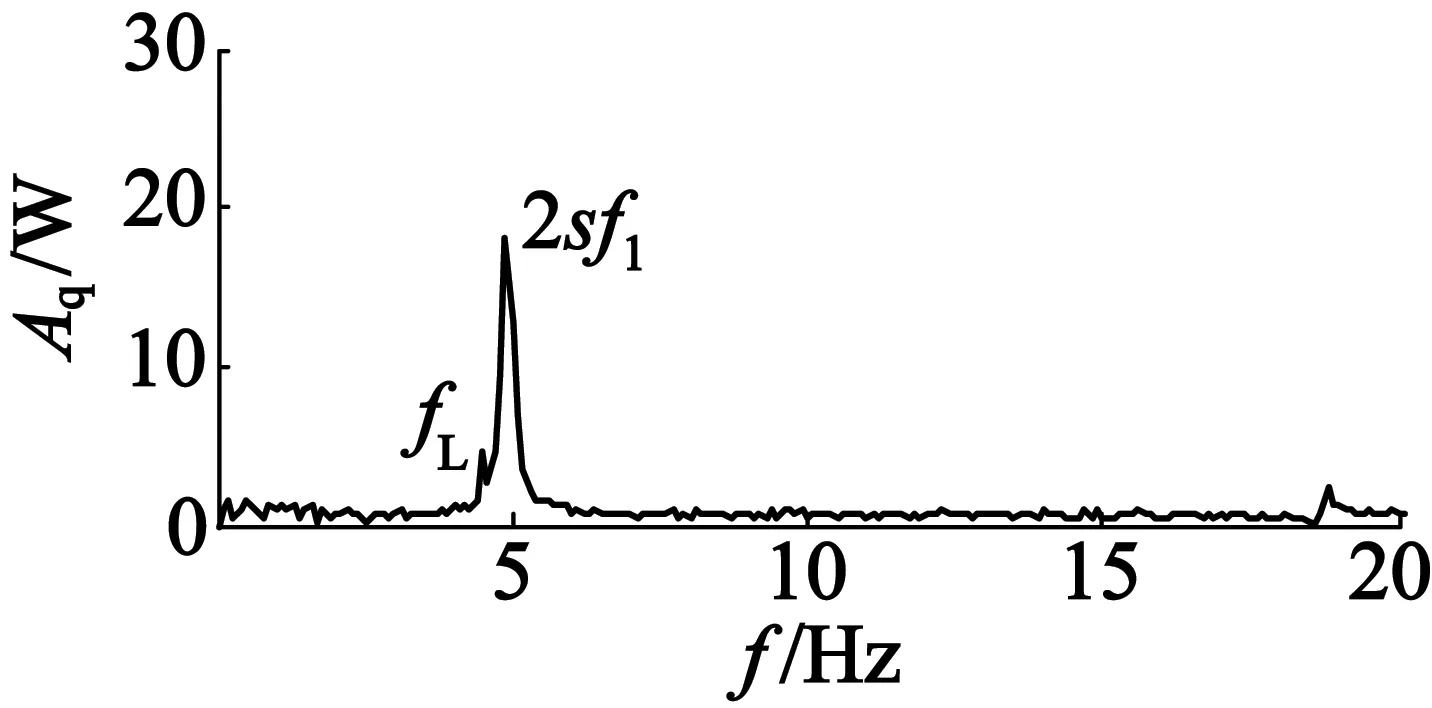
(b) 無功功率頻譜
由圖8可知,斷條故障特征頻率2sf1在IRP中的幅值明顯大于IAP;而負(fù)載波動特征頻率fL在IAP的幅值明顯大于IRP。由此便可以將負(fù)載波動與轉(zhuǎn)子斷條故障進(jìn)行區(qū)分。
然后,對不同負(fù)載下電機(jī)瞬時功率進(jìn)行DWT分解并提取頻段能量,電機(jī)瞬時功率小波能量如圖9、圖10所示。其中頻段7為特征頻率所在頻段。
由圖9可知,對于恒定負(fù)載,當(dāng)感應(yīng)電動機(jī)出現(xiàn)轉(zhuǎn)子斷條故障時,特征頻段7的IRP小波能量幅值明顯大于IAP的小波能量幅值。由圖10可知,當(dāng)感應(yīng)電動機(jī)只存在負(fù)載波動時,IAP的小波能量幅值明顯大于IRP的小波能量幅值;而對于同時存在負(fù)載波動與轉(zhuǎn)子斷條故障時,頻段7的IAP,IRP的小波能量幅值均增大,且大于某一設(shè)定閾值。
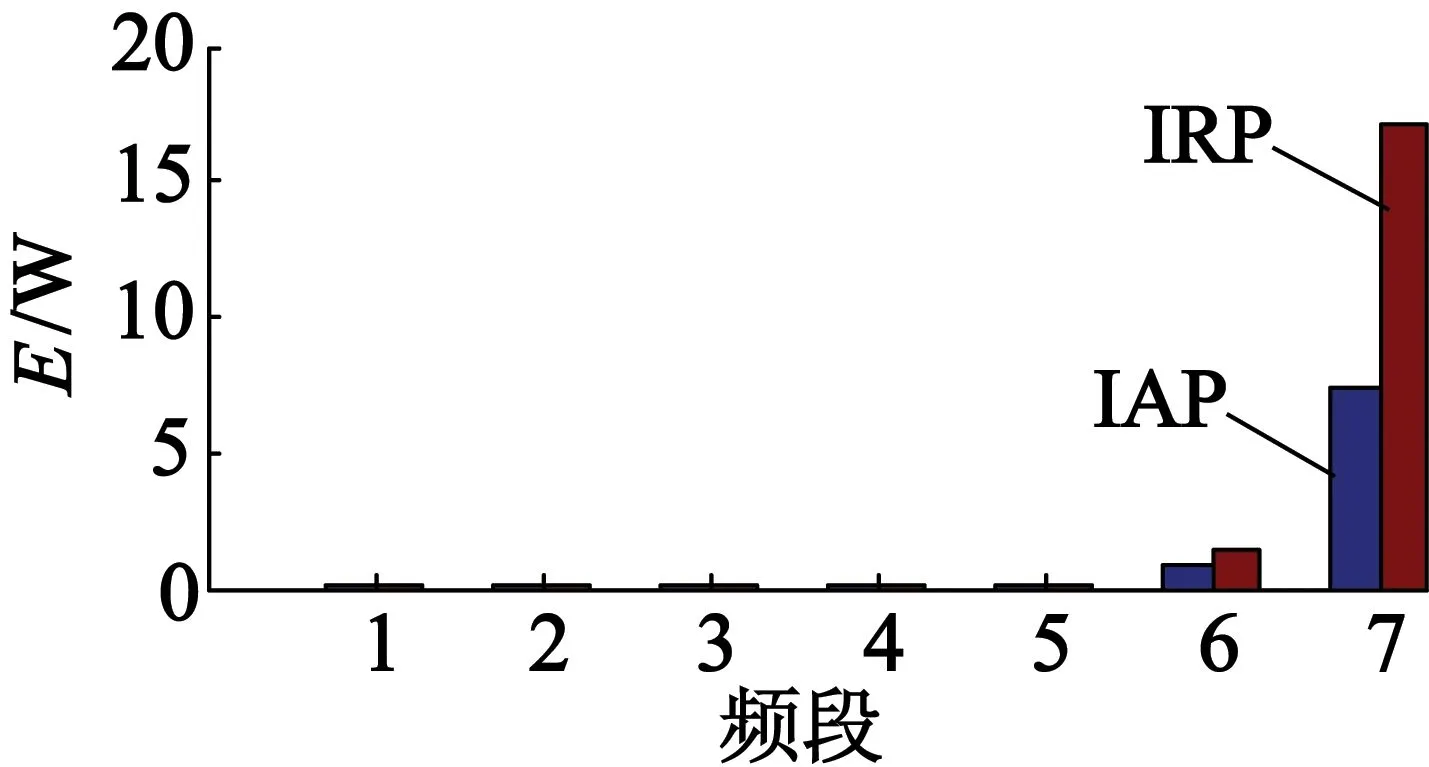
圖9 恒定負(fù)載轉(zhuǎn)子故障電機(jī)小波能量
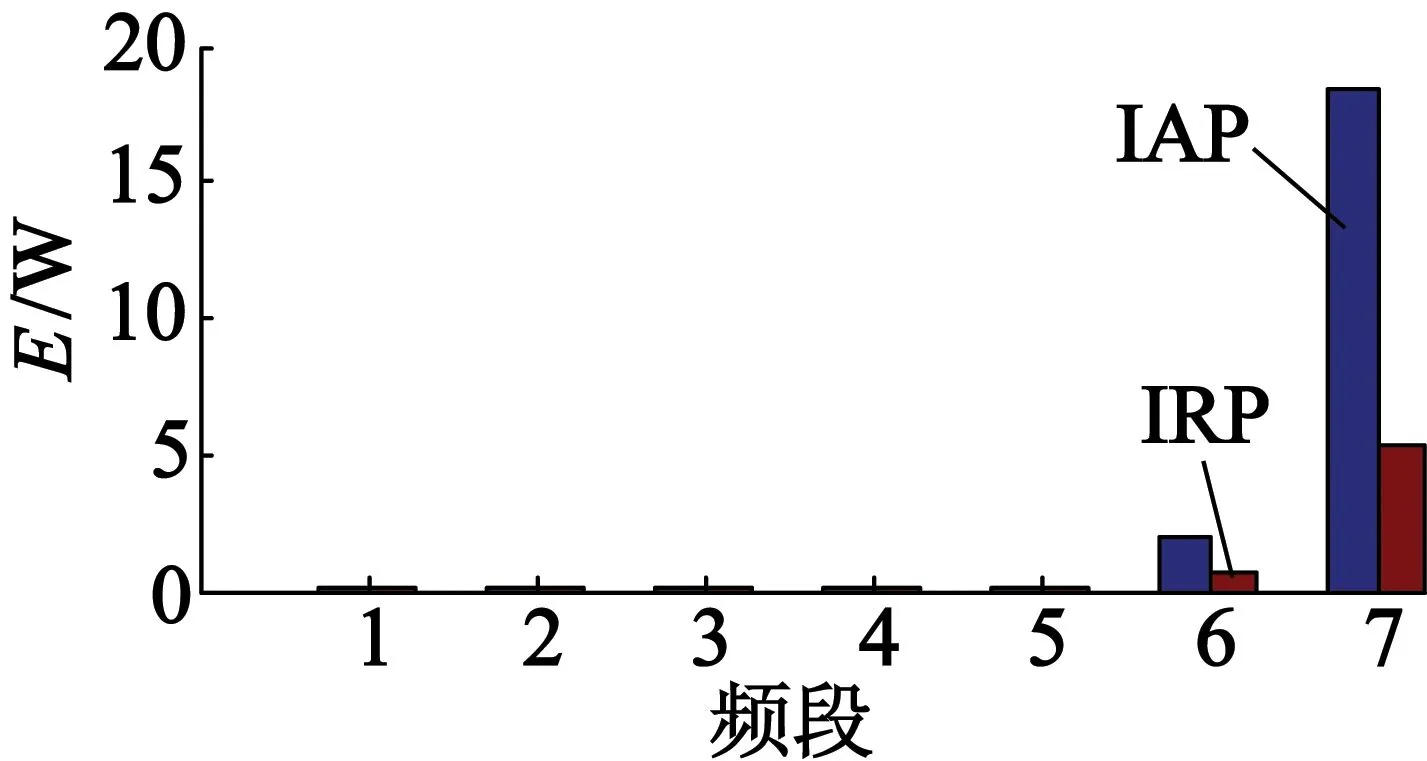
(a) 負(fù)載波動正常電機(jī)

(b) 負(fù)載波動斷條故障電機(jī)
經(jīng)過DWT提取能量之后,各種狀態(tài)下特征頻段的能量幅值大小如表3所示。
由表3可知,當(dāng)瞬時功率小波能量出現(xiàn)Ep
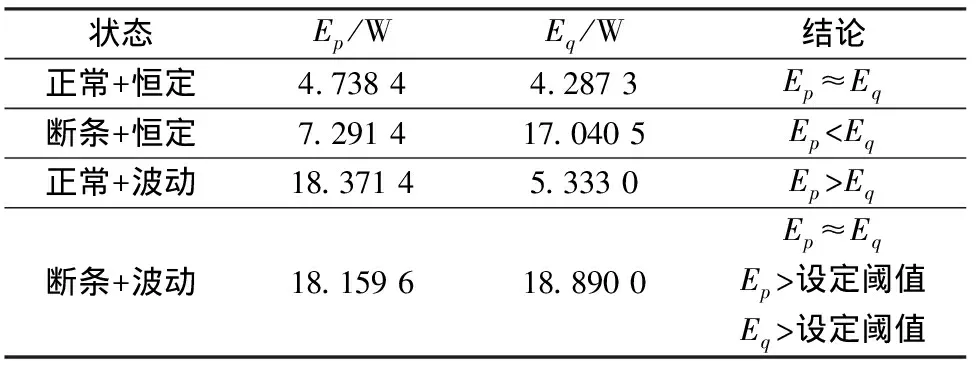
表3 DWT能量幅值
采用本文方法對不同狀態(tài)電機(jī)提取特征向量,選取一部分?jǐn)?shù)據(jù)訓(xùn)練集成分類器,形成負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷模型,剩下的數(shù)據(jù)作為測試數(shù)據(jù)集。測試結(jié)果如表4所示。
由表4可知,基于集成分類器的負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷模型具有較高的分類正確率,可以準(zhǔn)確識別感應(yīng)電動機(jī)狀態(tài)。
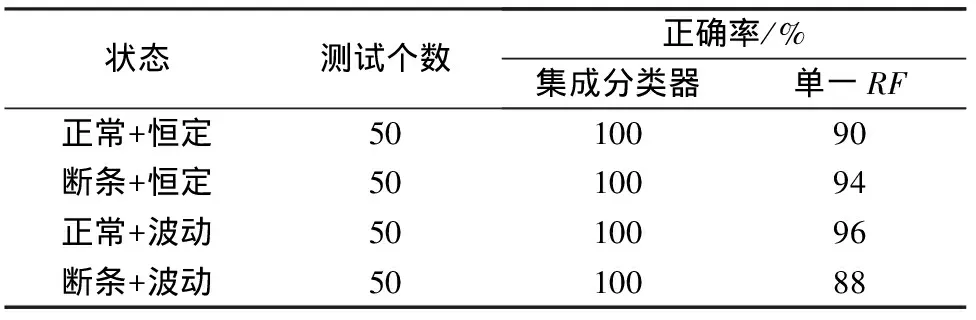
表4 集成分類器測試分類結(jié)果
5 結(jié) 語
本文針對負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷方法進(jìn)行了研究。
1) 研究了一種負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷方法并給出了明確有效的診斷判據(jù)。
2) 本文方法另辟蹊徑,不依賴頻譜分析技術(shù),當(dāng)2sf1與fL非常接近,甚至相同時,亦能對斷條故障特征進(jìn)行準(zhǔn)確提取。
3) 引入集成分類器,克服了傳統(tǒng)單一分類器分類正確率低的弊端,進(jìn)一步提高了負(fù)載波動下感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷精確性。
4) 通過實驗驗證了恒定負(fù)載及波動負(fù)載下,該方法對感應(yīng)電動機(jī)轉(zhuǎn)子斷條故障診斷的有效性、可行性。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
