太空轉位機械臂剛性特征研究
2019-07-05 05:24:20楊原青徐志剛王軍義白鑫林
兵器裝備工程學報 2019年5期
楊原青,徐志剛,王軍義,白鑫林,張 偉,4
(1.東北大學 機械工程與自動化學院, 沈陽 110819; 2.中國科學院沈陽自動化研究所, 沈陽 110016;3.中國科學院機器人與智能制造創新研究院, 沈陽 110016; 4.中國科學院大學, 北京 100049)
我國計劃在2020年建成近地空間站[1],空間站由核心艙、實驗艙Ⅰ、實驗艙Ⅱ、貨運飛船及載人飛船等部分構成,各組成部分像搭積木一樣構成“T”型結構,如圖1所示。
整個空間站建造的過程中由于種種復雜的原因實驗艙與核心艙一般選擇軸向對接[3-4];為了空間站的建設同時也方便下一艘飛船的對接,需要把軸向對接的實驗艙轉到徑向位置,這就需要轉位機械臂,如圖2所示。
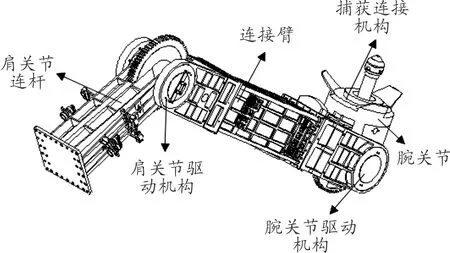
圖2 機械臂模型圖
工作時,機械臂的一端安裝在核心艙上,另一端連接上捕獲連接機構[5]。當實驗艙與核心艙自動對接完成后,裝在核心艙上的機械臂將實驗艙捕獲,并按照預設的軌跡將實驗艙由軸向對接口轉到徑向。
實驗艙在外太空雖然只受微小的重力,但是由于其質量巨大,約為20噸[6],故機械臂在帶動實驗艙進行轉動的過程中產生巨大轉動慣量;這就要考慮轉位機械臂的剛性,要確保能夠勝任太空中的轉位工作。
1 全物理實驗方法原理
由于航天產品的特殊性,在地面上要對其進行全方位的實驗以確保其可靠性。單就轉位機械臂而言其試驗方法就有很多種,美俄的全實物實驗方法[7-8],李洪山,孫英達等提出了電慣量模擬機械轉動慣量方法[9],即采用電機轉動時產生的轉動慣量模擬機械臂在太空中進行轉位運動時的轉動慣量。哈樂,房立金等提出了一種基于齒輪的負載等效慣量模擬方法[10],采用高精度齒輪箱在轉動的過程中所產生的轉動慣量模擬機械臂在太空中的轉動慣量。王軍義,賀云等提出了一種基于飛輪的半物理電動負載模擬方法[11],采用高精度飛輪組在轉動時形成的轉動慣量模擬機械臂在太空中轉動慣量。
全實物實驗方法雖然得到的數據可靠性和準確性較高,但是非常難以實現;基于電機的電慣量模擬、基于齒輪的等效模擬以及基于飛輪的等效負載模擬,雖然實現比較容易,但由于電機模擬或多或少都會帶來一些額外的扭矩,實驗結果的準確性和可靠性都比較差,為此設計了一套全物理的實驗方法,克服以上方法的不足,準確模擬機械臂在太空中運行。
全物理實驗方法主要由模擬核心艙的基體、氣浮機構、機械臂、中間連接梁、模擬實驗艙質量塊、跟隨移動小車及軌道等部分構成,如圖3所示。
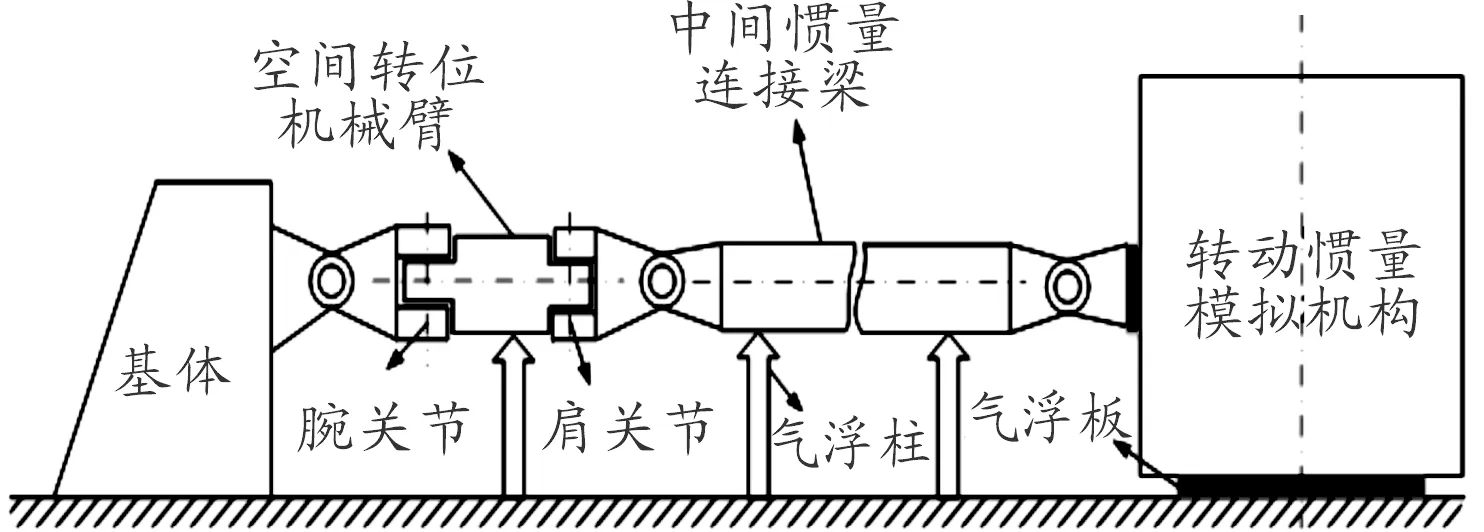
圖3 全物理實驗原理圖
由圖3可以看出在全物理實驗中被測太空機械臂的腕關節部分與地面上模擬核心艙的基座固連,而肩關節部分則與中間的連接梁連接,中間的連接梁的另一端與模擬實驗艙巨型質量塊連接,質量塊安裝在氣浮滑板上,由氣浮滑板提供微重力,氣浮滑板安裝在跟隨移動的小車上,小車在軌道上跟隨運動,持續不斷的給質量塊提供微重力環境,形成“連續”的支撐,而實驗的其他組成部分則由氣浮柱提供微重力環境。
實驗時,氣浮機構為全物理設備提供的微重力環境,空間轉位機械臂按照太空中的方式轉動,由于是在氣浮微重力環境下進行的實驗,實驗設備和支撐大理石之間為氣體潤滑摩擦力,可以忽略不計,從而機械臂在轉動的過程中帶動質量塊跟隨轉動;為了持續不斷的給質量塊提供微重力環境,移動小車在軌道上跟隨質量塊運動。
在整個試驗中只有被測機械臂本身的肩關節和腕關節處的驅動機構的動力源,并沒有引入額外的其他動力機構,太空機械臂在實驗中的運動方式和在太空中的轉位方式也基本相同,整個試驗得到的數據準確度較高為全真模擬。
2 全物理實驗動力學建模
寫出動力學方程主要有牛頓-歐拉法和拉格拉日法,這里采用牛頓歐拉法寫出全物理實驗裝置的動力學方程。
2.1 全物理實驗裝置模型簡化
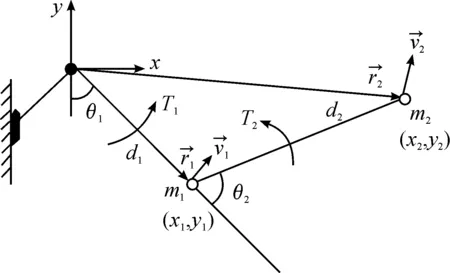
圖4 全慣量簡化模型

(1)

(2)

(3)

(4)
系統的總動能K為:


(5)
系統的總位能P為:

m2gd2cos(θ1+θ2)
(6)
系統的總能耗D為:
(7)
外力矩所做的功W:
W=T1θ1+T2θ2
(8)
2.2 牛頓歐拉法動力學建模
牛頓-歐拉方程的一般形式為:
i=1,2,…,n
(9)
式中的W,K,D,P的含義分別為外力所做的功、動能、所消耗的能量、位能;qi表示動能和位能的坐標,i為連桿代號,n為連桿數目。根據式(9),當qi=θ1時:
(10)
進一步對t求導則有:

(11)
(12)
(13)
將上面各導數帶入到式(9)可得:

(m1+m2)gd1sinθ1+m2d2gsin(θ1+θ2)
(14)
同理qi=θ2時,有:

(15)
(16)
(17)
把以上各式帶入式(9)后化簡得:


(18)
可以將其寫成一般形式:


(19)

(20)
將式(19)與式(20)寫成矩陣的形式:
(21)
其中D11和D22分別是腕關節與肩關節處的轉動慣量,則有:
(22)
(23)
2.3 關節處所受轉動慣量
對全物理模型建立了動力學方程,得到了肩關節和腕關節所受轉動慣量的表達式,把相關實驗數據m1=30 kg、m2=7 700 kg、l1=1.4 m、l2=9.5 m,代進去可得腕關節和肩關節的轉動慣量,分別如圖5所示。
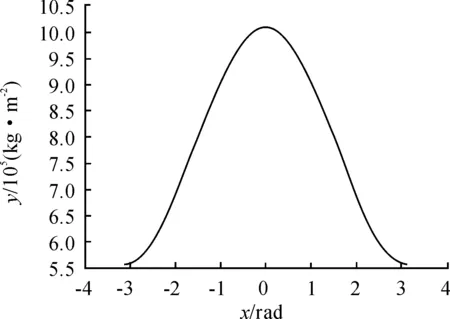
圖5 腕關節轉動慣量
由圖5可知腕關節轉動慣量的最大值為1.007 0×106kg·m2,最小值為5.052 6×105kg·m2;可見兩者都大于所要求的3.2×105kg·m2。而對于肩關節的轉動慣量由于它與轉角θ沒有關系,為一定值7.648 7×105kg·m2,可見其也大于所要求的3.2×105kg·m2,如圖6所示為肩關節所受轉動慣量。
無論是肩關節還是腕關節所受的轉動慣量均滿足實驗要求,證明了全物理方法的有效性。空間轉位機械臂能否承受這么大的轉動慣量,將通過動力學和靜力學分析來驗證。
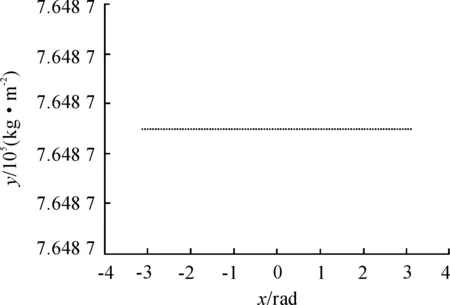
圖6 肩關節處的轉動慣量
3 空間轉位機械臂特性分析
空間轉位機械臂在太空中帶動實驗艙進行轉位,由物理學可知其必然受到超大轉動慣量。
3.1 空間轉位機械臂動力學分析
采用如圖7所示的Adams模型為空間轉位機械臂進行動力學分析,將實驗模型導入到Adams。
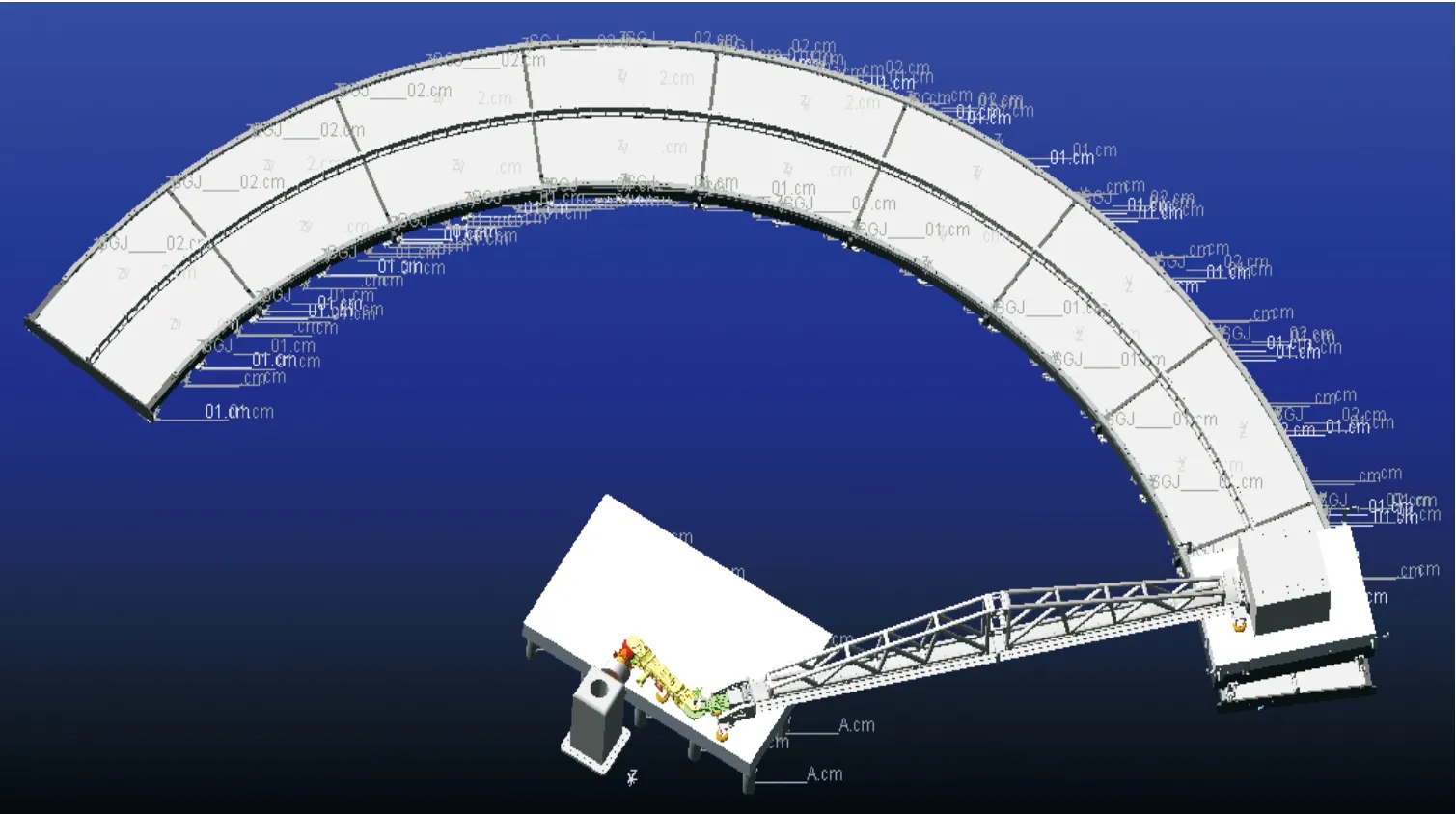
圖7 Adams模型
通過對軟件的相應操作,可以得到空間轉位機械臂各個關節處的力和力矩如圖8~圖15所示。
分析圖8~圖11可知支座連接處、腕關節處、肩關節處以及連接梁和肩臂桿處所受的最大力分別為51 889.5 N、1.170 3×105N、1.156 3×105N以及1.121 2×105N。
分析圖12~圖15可知支座連接處、腕關節處、肩關節處以及連接梁和肩臂桿處所受的最大扭矩分別為:1.145 2×106N·m、1.123 8×106N·m、9.698 7×105N·m以及8.776 1×105N·m。
經分析可得各個關節處所受的力矩為:
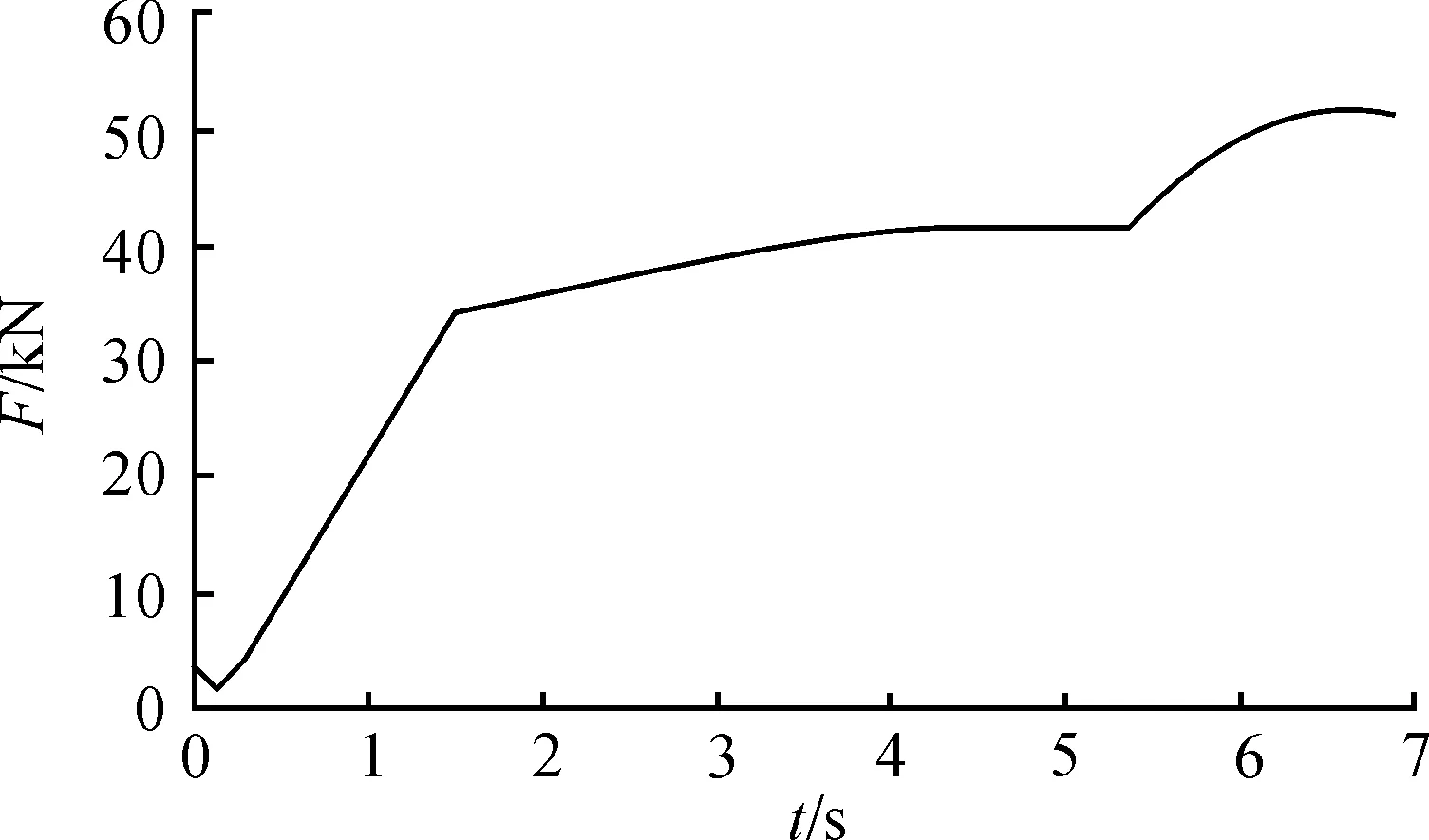
圖8 支座連接處受力
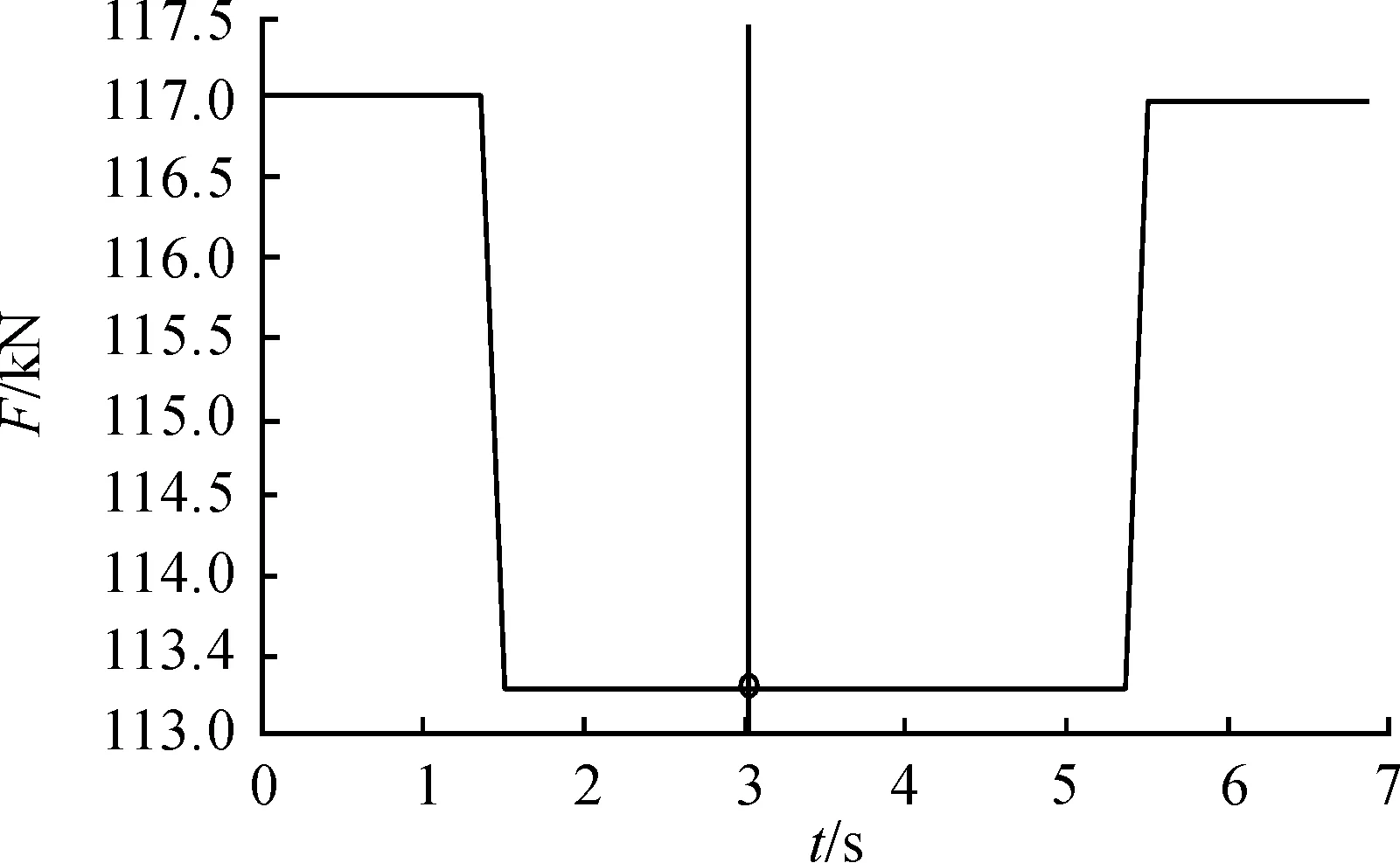
圖9 腕關節處受力
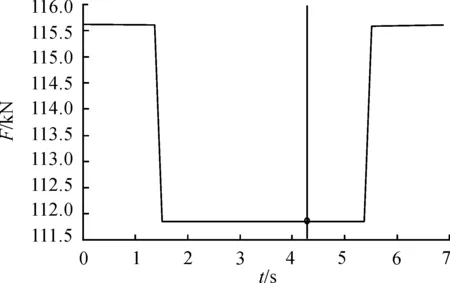
圖10 肩關節處受力
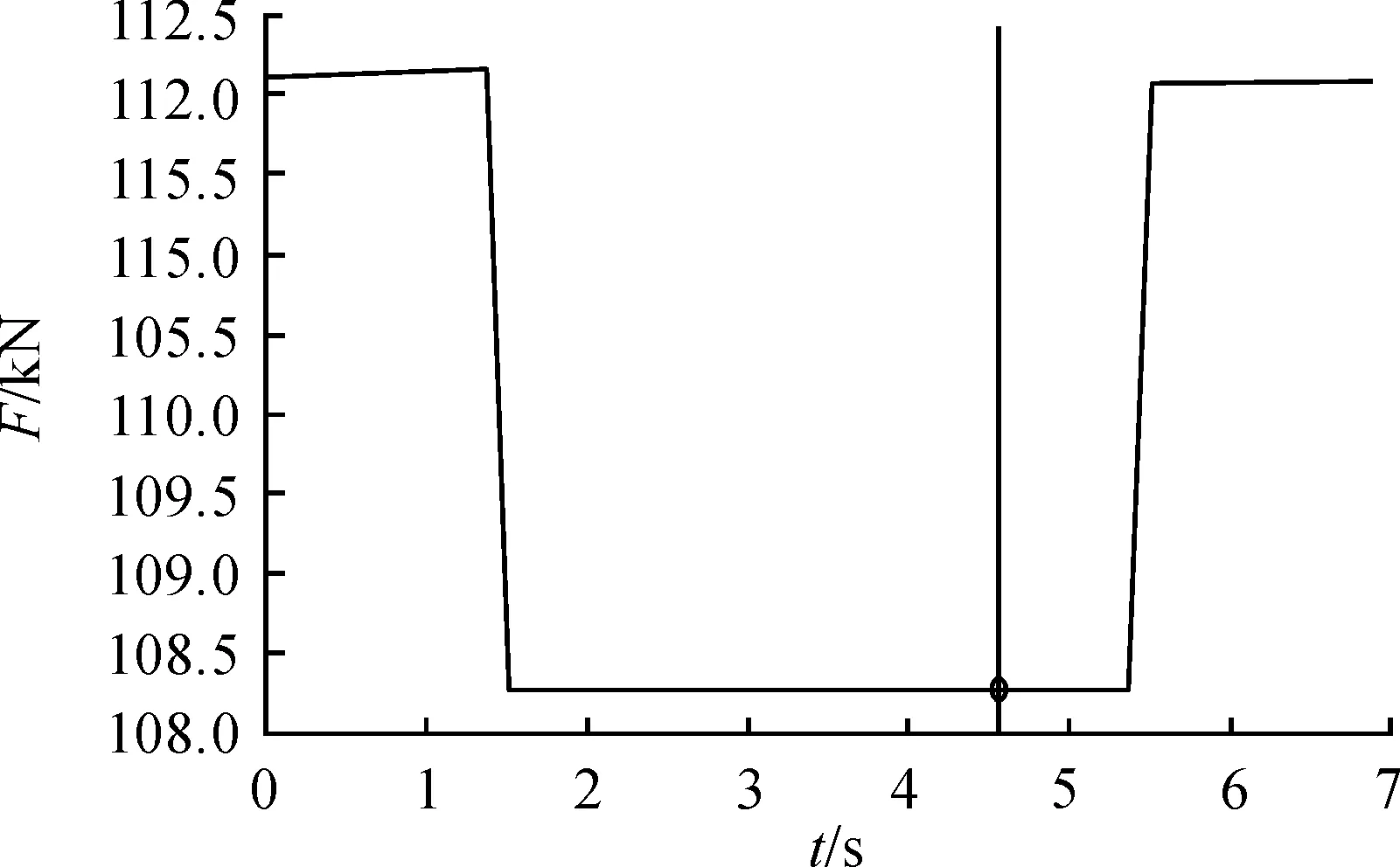
圖11 連接梁和肩臂桿處受力
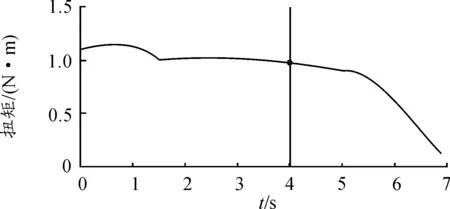
圖12 支座連接處扭矩
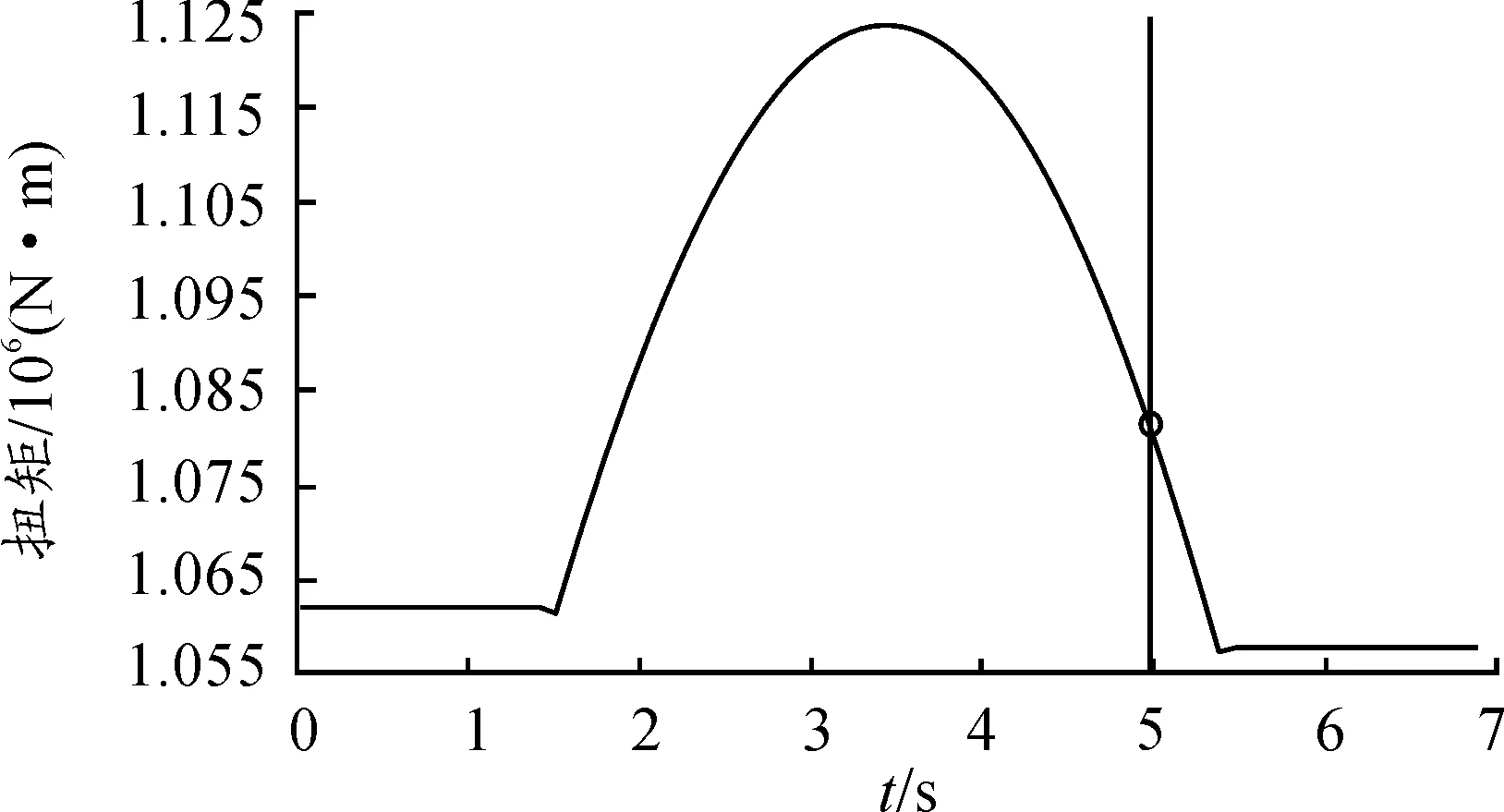
圖1 3腕關節處扭矩
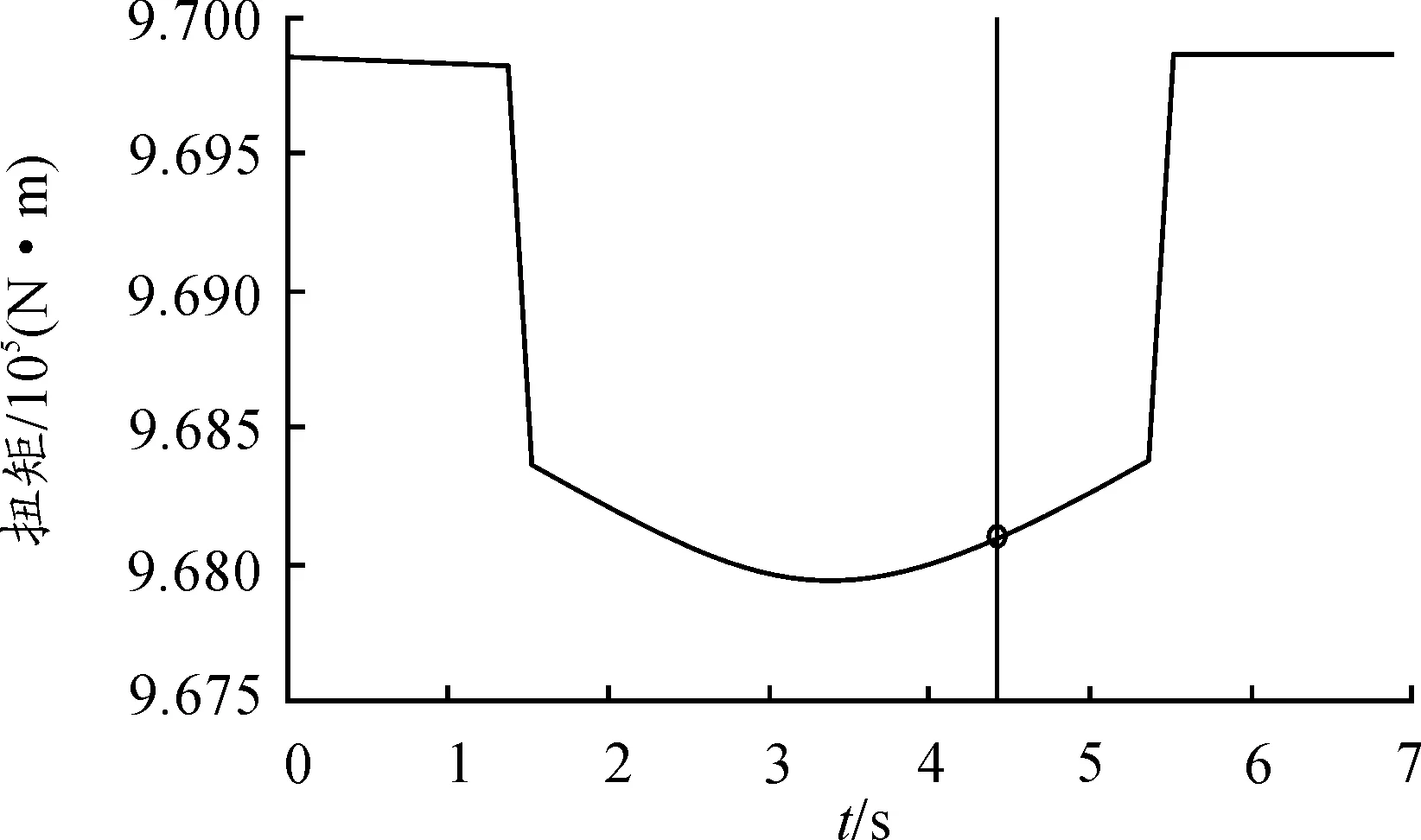
圖14 肩關節處扭矩
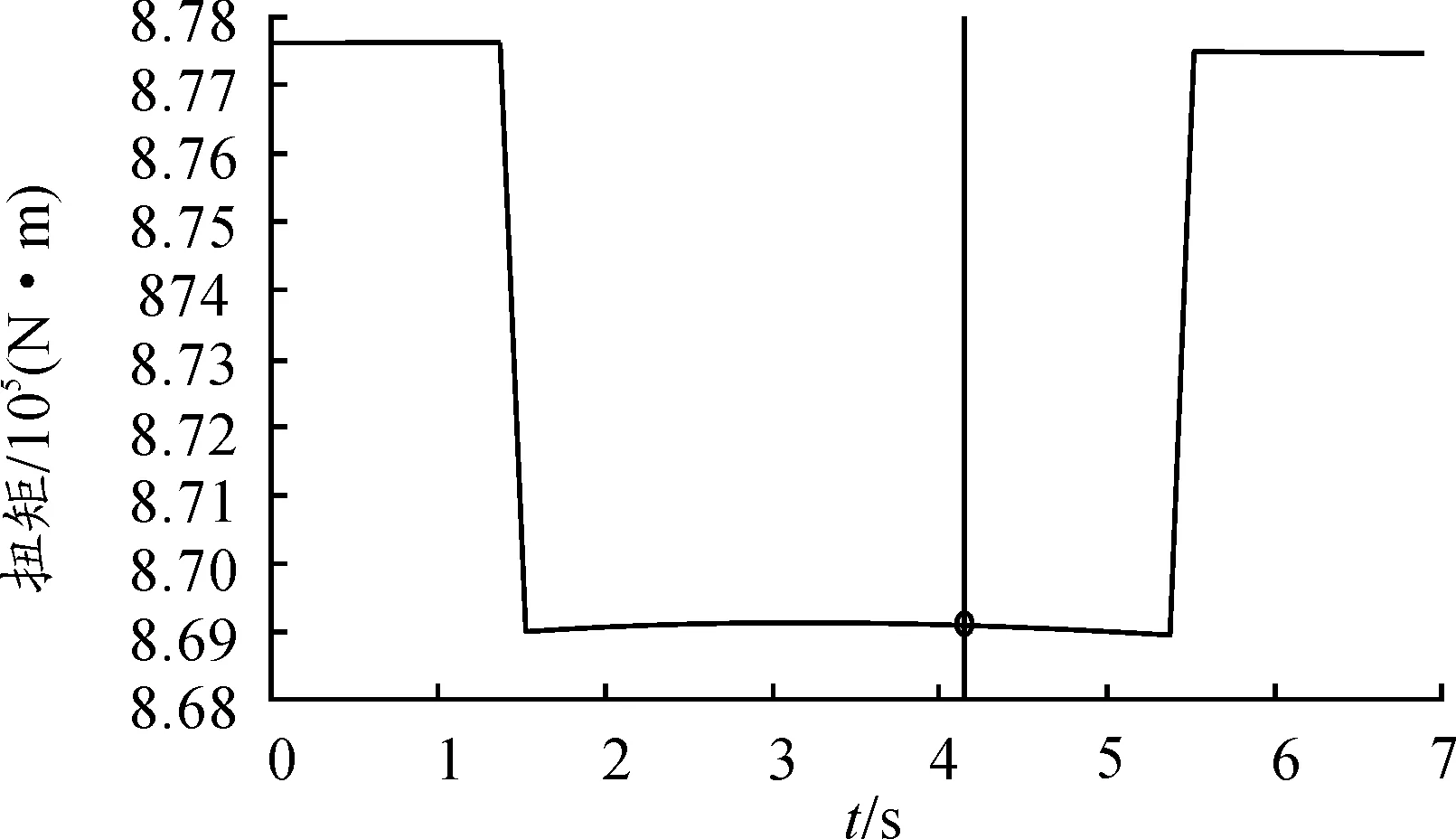
圖15 連接梁和肩臂桿處扭矩
3.2 空間轉位機械臂靜力學分析
能夠進行結構力學仿真的軟件很多,由于Ansys功能強大,操作方便,采用Ansys對全物理實驗模型進行靜力學仿真[15-16],實驗數據則來自于上一節的動力學仿真,并且將最大力1.170 3×105N和最大扭矩1.145 2×106N·m帶入建模可得機械臂關節在最大作用力下的變形如圖16所示。
從圖16可以看出整個機械臂在各個關節所受最大作用力下的總體變形,最大處為0.13 mm,證明了其能夠帶動慣量模擬機構進行轉動,滿足設計的要求。
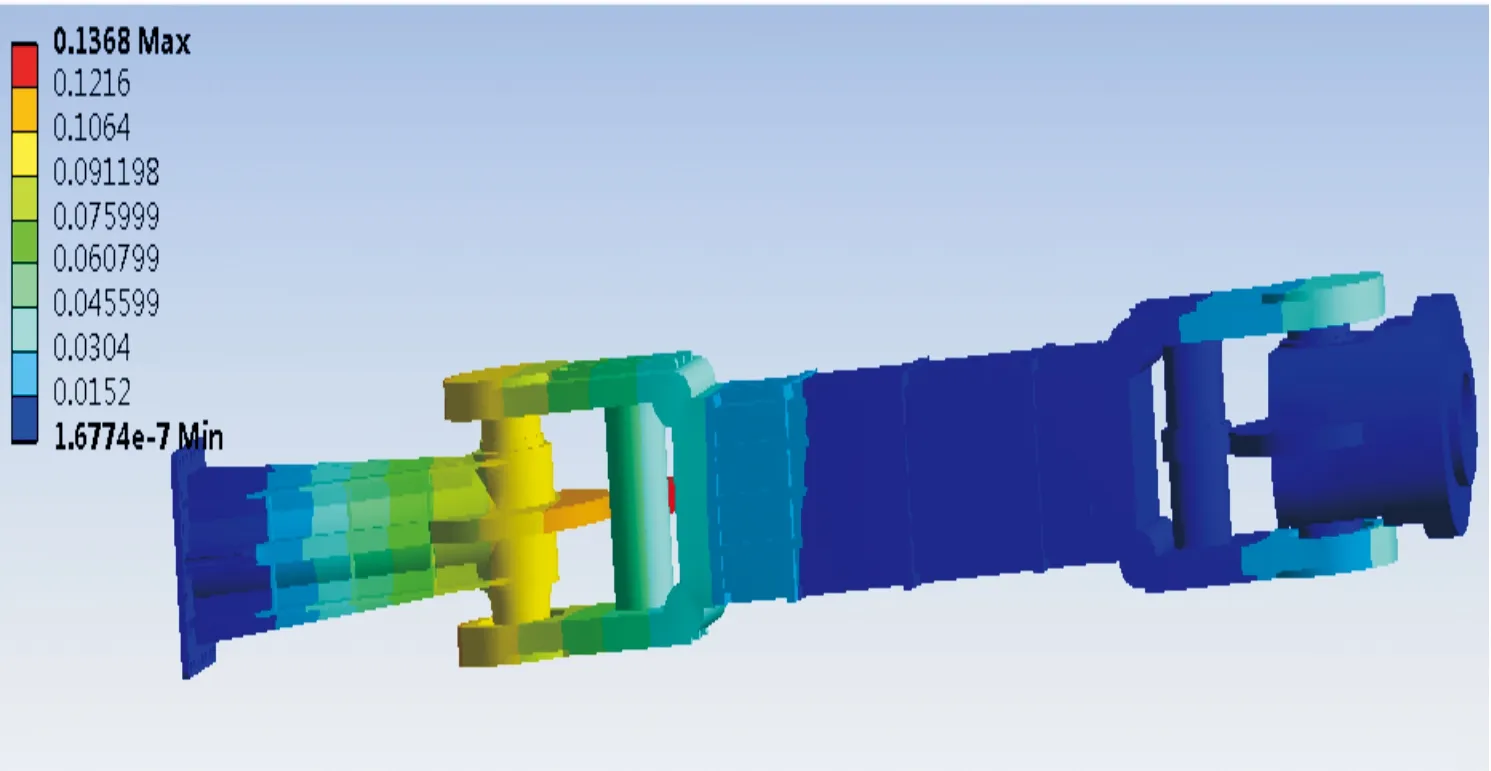
圖16 機械臂在各個關節受力下的總體變形
4 結論
通過solidworks建立三維模型,并用Adams對模型進行動力學建模,得到各連接部位以及關節連接處所受的力和力矩,最后把這些數據導入到Ansys中,通過Ansys的結構分析可知太空機械臂在剛性上滿足設計要求,能夠勝任太空中的轉位任務;并且全物理實驗裝置的關鍵部件也滿足設計要求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
井岡教育(2022年2期)2022-10-14 03:11:44
當代工人(2020年8期)2020-05-25 09:07:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
發明與創新(2016年38期)2016-08-22 03:02:52
科技知識動漫(2016年8期)2016-07-29 20:40:09
太空探索(2016年5期)2016-07-12 15:17:55