基于ROS的移動機器人SLAM研究與實現
2019-07-08 02:23:41曹家寧陸馨妍熊依琪
電腦知識與技術 2019年13期
關鍵詞:移動機器人
曹家寧 陸馨妍 熊依琪
摘要: 近年來,隨著高新科學技術的不斷發展,移動機器人的研究進展越來越迅速。其中移動機器人在未知環境下,實現同時定位與環境地圖構建(SLAM,Simultaneous Localization and Mapping)過程是機器人研究的重要領域。本文簡單介紹了ROS操作系統并研究了與 SLAM 問題相關的幾類系統模型及Gmapping_slam、Hector_slam和Google開源的Cartographer_slam等相對成熟的slam算法。并對上述的三種 SLAM 算法在實際應用中的性能進行分析。
關鍵詞:移動機器人;ROS;SLAM
中圖分類號:TP311 ? ? ? ?文獻標識碼:A
文章編號:1009-3044(2019)13-0199-02
引言
近些年,移動機器人的應用已滲透到各個行業中,如軍事偵察、醫學診療、物料搬運、社會服務、工業和農業生產等。正是由于如此廣泛的應用,決定了移動機器人的工作場景既復雜又具很多不能確定的因素。因此移動機器人的定位能力、環境感知能力等對其完成任務的成功率、自身定位的準確率和自身性能的完善起到了至關重要的作用。移動機器人是否可以利用自身隨帶的各種傳感器采集到的周圍環境信息來進行運動場景地圖的創建,以及通過預設的一些指令完成相關指令規劃的任務,在運行的過程中完成自主分析,自主決策,最終順利到達目的地 ,這一問題已經成為研究學者們學習和鉆研的關鍵。
隨著GPS技術的廣泛應用,當移動機器人處于空曠、信號良好的室外環境時,上述問題可以利用高精度的GPS來解決。但在室內或一些復雜環境中,GPS的信號很不穩定時,就需要使用其他技術來解決移動機器人定位及環境地圖創建問題。因此,研究學者們提出了SLAM。至今,SLAM已成為移動機器人研究領域的一項重要課題。
1 ROS系統
ROS(Robot Operating System,下文簡稱“ROS”)是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞,以及包管理。
1.1 ROS優勢
1.1.1多語言支持及開源環境
ROS由于開發者使用的語言不同,因此ROS獨立了開發語言,支持C++、python等多種語言。除了ROS提供的功能包之外,ROS還匯合了全球開源社區開發者實現的大量功能包。這些開源功能包與ROS一起創建了強大的開源生態環境。
1.1.2 結構設計松耦合
程序運行時是由多個松耦合的進程組成,每個ROS進程稱之為節點(Node)。所有節點可以運行在一個處理器上,也可以通過ROS分布式特性運行在多個處理器上。在實際開發時,這種結構設計可以讓開發者根據作品所需功能方便靈活地添加功能模塊。
1.2 ROS缺陷
ROS的功能由各個節點組成,節點間通過消息機制通信,通訊環節消耗了很多計算資源。尤其是當所有節點運行在同一個處理器時,ROS仍然執行相應的消息分發,節點間的數據通信通過內存復制,使得系統必須選用高性能的處理器和存儲系統以彌補速度的不足。
2 SLAM相關模型
2.1常用傳感器模型
2.1.1 激光傳感器
激光傳感器通過激光來測量到被測物體的距離等參數。常用的測距方法是由激光器發出時間極短的脈沖激光發射到被測目標,回波返回,由光電探測器接收。根據主波信號和回波信號之間的時間間隔,就可以算出到待測目標的距離。
2.1.2 視覺傳感器
視覺傳感器探測范圍較廣、獲取信息較激光傳感器豐富,實際應用中常使用多個視覺傳感器或者與其他傳感器配合使用,通過科學合理的算法可以得到物體的點云、距離、色彩等諸多信息;還可通過SSD算法,根據一個鏡頭的運動圖像來計算本地與目標的相對位移。
2.2 柵格地圖
柵格圖像,即光柵圖像,是指在空間和亮度上都已經離散化了的圖像。我們通過把一幅柵格圖像考慮為一個矩陣,矩陣中的任一元素的坐標對應于圖像中的一個點,而元素的值對應于該點的灰度級,矩陣中的元素叫作像素。
柵格地圖主要就是把地圖離散化為一個個的單元(cell),每個單元占據 r*r 個像素,所以 r 的大小就代表了地圖的分辨率。當 cell 為 free 時,該 cell 的灰度值就設為 255,也就是白色,當 cell 為 occupied 時,該 cell 的灰度值就設為 0 ,也就是黑色。初始時我們不知道 cell 具體的狀態,我們就將其設為 100 ,也就是灰色。接下來我們設 mi為第 i 個 cell 是否occupied 的隨機變量,那么 p(mi=1) 或 p(mi) 就表示第 i 個 cell 為 occupied 的概率,所以 p(mi)=1 就表示第 i 個 cell 為 occupied ,p(mi)=0 就表示第 i 個 cell 為 free 。
2.3 坐標位姿模型
與向量間的旋轉類似,我們同樣可以描述兩個坐標系之間的旋轉關系,再加上平移,統稱為坐標系之間的變換關系。在機器人的運動過程中,常見的做法是設定一個慣性坐標(或者叫世界坐標系),可以認為它是固定不動的,如圖中的[Xw,Yw,Zw]定義的坐標系。同時,傳感器或機器人是一個移動坐標系,例如[Xc,Yc,Zc]定義的坐標系。相機視野中某個向量P,它的坐標為[Pc],而從世界坐標系下看,它的坐標為[Pw]。這時,就需要先得到該點針對機器人坐標系坐標值,再根據機器人位姿轉換到世界坐標系中,這個轉換關系由一個矩陣T來描述。
3 ?2D SLAM 算法介紹與實現
算法的輸入一般是:機器人對周圍環境的觀測信息 z (激光雷達的掃描點、攝像頭的圖像等) 和 機器人的控制信息 u (運動過程中的前進轉向等信息,一般對其積分后用里程計 odometry 來表示);算法的輸出是:機器人的運動軌跡 x 和 周圍的地圖 m 。
而我們要做的就是在給定 z 和 u 的條件下估計出 x 和 m:
p(x,m|z,u)
我們用概率形式來表示在存在各種誤差的情況下,使用 z 和 u 來估計 x 和 m 的分布。并且在 2d SLAM 中, x 就是一個 [x,y,theta] 的三維隨機變量, 如果 m 是柵格地圖, m 就是一個 r*c 維的隨機變量,其中 r 是地圖的寬度, c 是地圖的長度,所以我們可以用一個條件概率來解決我們的問題。
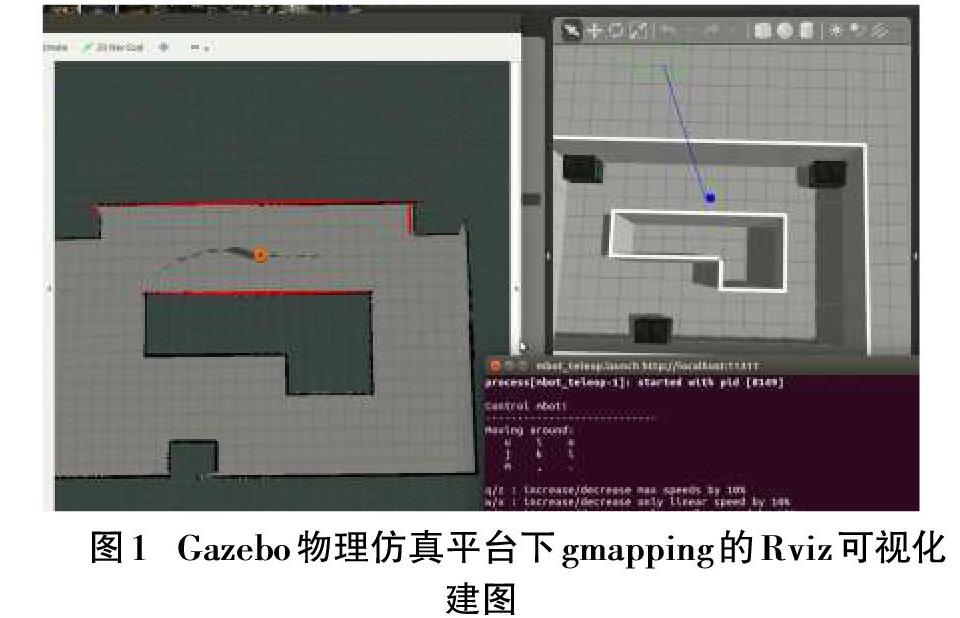
3.1 Gmapping slam
Gmapping是基于濾波SLAM框架和RBpf粒子濾波算法的常用開源SLAM算法,將定位和建圖過程分離,先進行定位再進行建圖。如圖1。
優點:Gmapping在構建室內小場景地圖時擁有計算量小、精度高的特點。里程計可以提供機器人的位姿先驗,算法有效利用里程計的信息,從而對激光雷達的頻率要求變低。
缺點:Gmapping犧牲空間復雜度保證時間復雜度,因此不適合構建大場景地圖。此算法沒有回環檢測,在回環閉合時可能會造成地圖錯位。
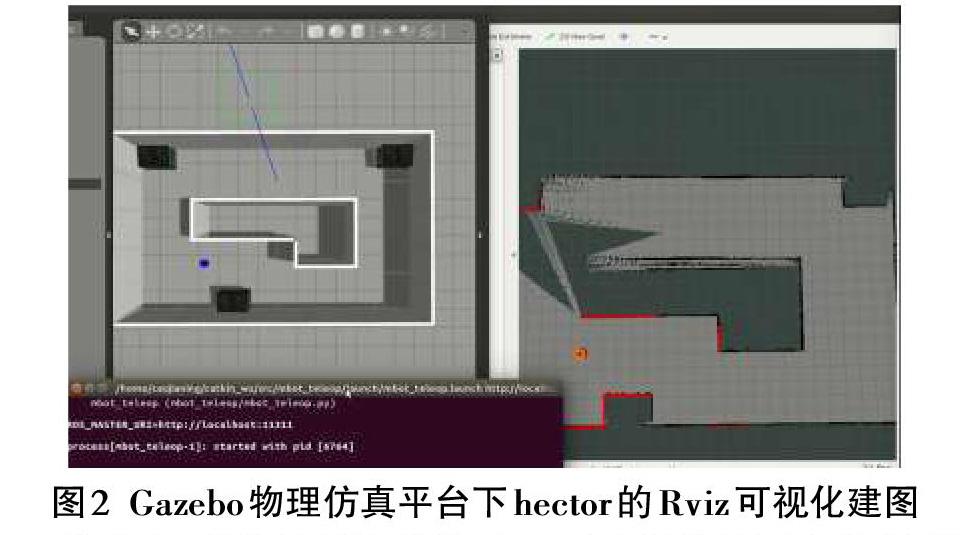
3.2 Hector slam
Hector_Slam利用現代激光雷達系統的高更新率,并以傳感器的掃描速率提供2D姿態估計。如圖2。
優點:不依賴里程計信息,空中無人機及地面小車在不平坦區域建圖得以普及;利用高斯牛頓數學方法處理scan-matching匹配問題,獲得激光點集會映射到已建地圖的剛體變換。
缺點:激光雷達的更新率要求較高,所建環境噪聲較小。所以在建圖過程中,需要移動機器人控制在速度比較低的條件下,建圖效果才會比較理想;且在里程計數據比較精確的時候,無法有效利用里程計信息。
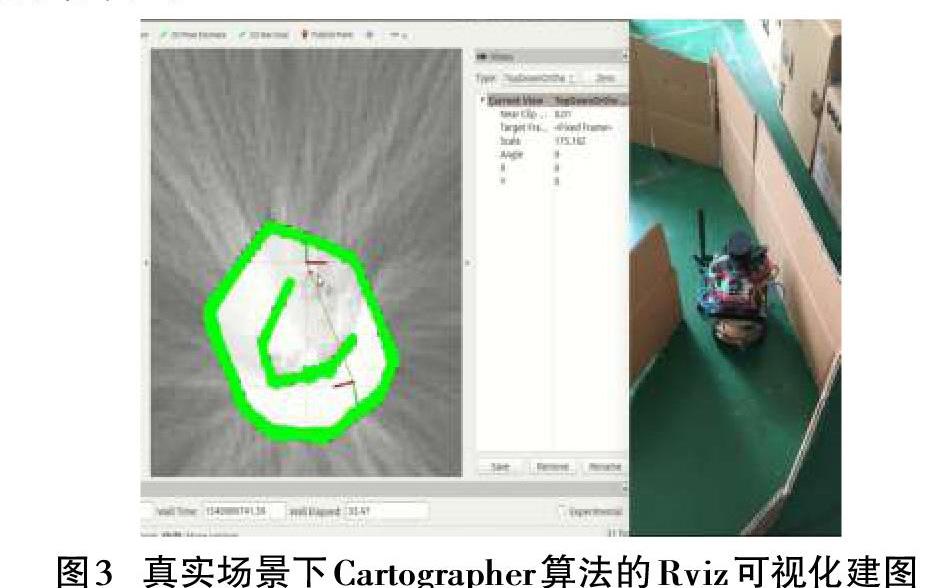
3.3 Cartographer slam
Cartographer_Slam基于激光雷達構建2D環境地圖,分辨率精確至5cm。激光雷達返回的數據scans會以最佳的位置插入到submap中,這個最佳的位置假設在一定的時間內可以認為是很準確的。其中scan matching必須是和它相對應的submap進行匹配,因此它只和最接近的scan點集有關。這個系統結合了局部最優和全局最優的方法,都對激光雷達觀測到的位置進行了優化。優化后的位置用[(ξx,ξy,ξθ)]表示,包括(x,y)坐標的轉化和角度的旋轉,實際上就是對scan點集的進一步優化。
我們在學校實驗室中用木紙板搭建了一個簡單的地圖環境,采用Jetson TX2硬件開發平臺驅動激光雷達采集周圍環境信息,并利用ROS分布式在同一局域網下在PC端運行Cartographer算法構建地圖,通過上位機與下位機的stm32f103單片機進行串口通信控制小車底盤的移動,從而實現了小車環境的構建。如圖3。
4 結束語
大體上講,SLAM發展趨勢有兩大類:一方面是朝輕量級、小型化方向發展,讓SLAM能夠在小型移動終端上良好運行,然后考慮以它為底層功能的實際應用。在大部分場合中,我們的研發目標是實現機器人、AR/VR設備的功能,比如說導航、教學、娛樂,而SLAM是為上層開發應用提供機器人本身的位姿估計。在這些應用中,我們不希望SLAM占用太多的計算資源。另一方面則是利用高性能設備,實現精密場景理解等功能。我們的目的是準確地重建場景地圖,而對于計算資源和設備的便攜性沒有多大要求。因此可以利用GPU,在這個方向和深度學習結合亦是計算機視覺的發展方向。
參考文獻:
[1] 高博.視覺SLAM十四講[M].北京:電子工業出版社,2016.
[2] Google.Real-Time Loop Closure in 2D LIDAR SLAM .[R] ICRA ,2016
[3] 王富.未知環境中移動機器人定位與建圖技術的研究[D].黑龍江:哈爾濱工程大學,2013.
[4] 梁明杰,閔華清,羅榮華.基于圖優化的同時定位與地圖創建綜述[J].機器人,2013(6).
[5] 顧其洋.基于ROS的家庭服務機器人SLAM的設計與實現[D].蘭州:西北師范大學,2016.
[6] 白佳奇.基于ROS的移動機器人改進視覺SLAM算法研究[D].天津:天津工業大學,2018.
【通聯編輯:唐一東】
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
