基于時變?nèi)斯輬鯬ID的智能汽車軌跡跟蹤控制
2019-07-09 23:33:04伏雨旋李孝銀吳鵬
時代汽車 2019年6期
伏雨旋 李孝銀 吳鵬

摘 要:針對傳統(tǒng)的PID模型對自動駕駛汽車控制精度不高的問題,提出了一種基于時變參數(shù)的人工勢場與PID協(xié)調(diào)控制的方法。控制系統(tǒng)由人工勢場輔助PID 控制,將包含橫向誤差和航向誤差的時變參數(shù)人工勢場力對前輪轉(zhuǎn)角進行控制。將單一的PID控制與時變參數(shù)人工勢場的PID協(xié)調(diào)控制相比較,其結(jié)果表明,該方法能夠?qū)崿F(xiàn)較高的控制精度以及較快的響應速度,并能夠有效的削弱橫向誤差。
關(guān)鍵詞:PID控制;時變?nèi)斯輬?協(xié)調(diào)控制
1 前言
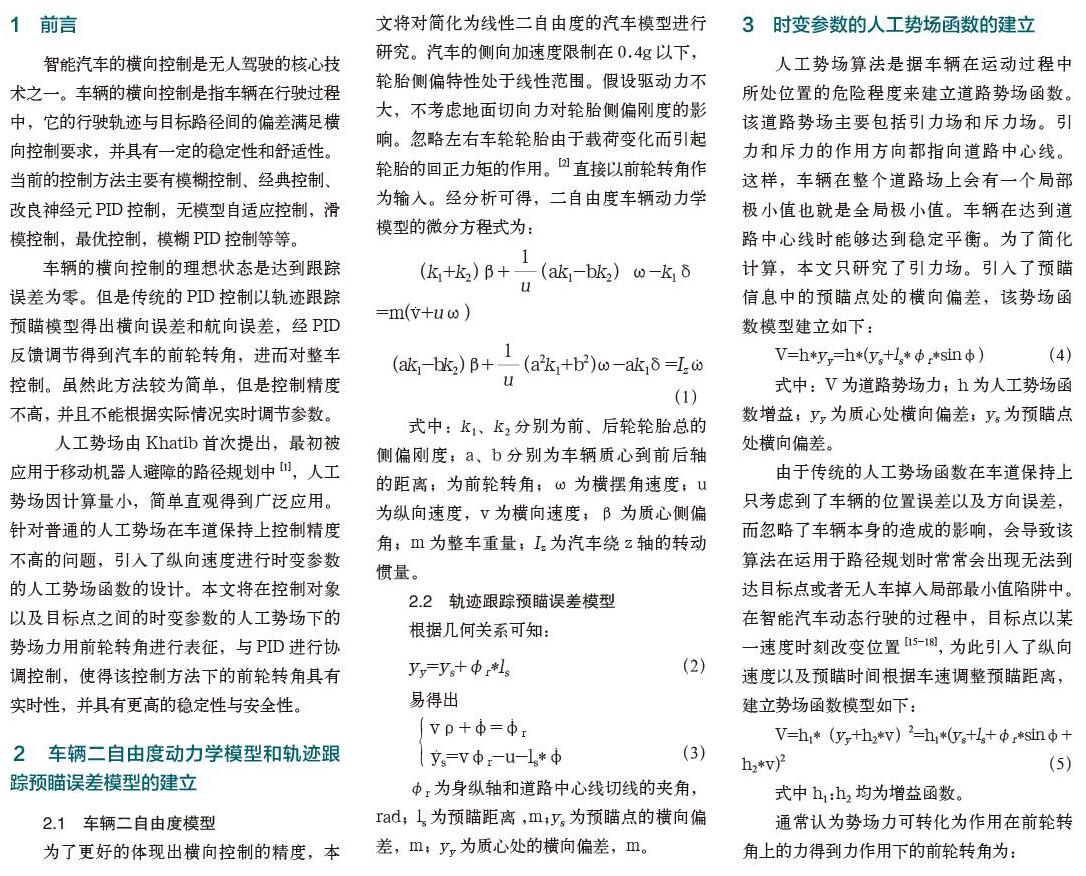
智能汽車的橫向控制是無人駕駛的核心技術(shù)之一。車輛的橫向控制是指車輛在行駛過程中,它的行駛軌跡與目標路徑間的偏差滿足橫向控制要求,并具有一定的穩(wěn)定性和舒適性。當前的控制方法主要有模糊控制、經(jīng)典控制、改良神經(jīng)元PID控制,無模型自適應控制,滑模控制,最優(yōu)控制,模糊PID控制等等。
車輛的橫向控制的理想狀態(tài)是達到跟蹤誤差為零。但是傳統(tǒng)的PID控制以軌跡跟蹤預瞄模型得出橫向誤差和航向誤差,經(jīng)PID反饋調(diào)節(jié)得到汽車的前輪轉(zhuǎn)角,進而對整車控制。雖然此方法較為簡單,但是控制精度不高,并且不能根據(jù)實際情況實時調(diào)節(jié)參數(shù)。
人工勢場由Khatib首次提出,最初被應用于移動機器人避障的路徑規(guī)劃中[1],人工勢場因計算量小,簡單直觀得到廣泛應用。針對普通的人工勢場在車道保持上控制精度不高的問題,引入了縱向速度進行時變參數(shù)的人工勢場函數(shù)的設(shè)計。本文將在控制對象以及目標點之間的時變參數(shù)的人工勢場下的勢場力用前輪轉(zhuǎn)角進行表征,與PID進行協(xié)調(diào)控制,使得該控制方法下的前輪轉(zhuǎn)角具有實時性,并具有更高的穩(wěn)定性與安全性。
2 車輛二自由度動力學模型和軌跡跟蹤預瞄誤差模型的建立
2.1 車輛二自由度模型
4 simulink仿真分析
本文中所采用的汽車整車參數(shù)如表1所示。
為驗證該方法的可行性,設(shè)置道路曲率隨時間的變化如圖2所示,系統(tǒng)的響應以及與傳統(tǒng)的單一PID的控制響應如圖3-5所示。
從響應曲線上來看,該控制方法幾乎不需要響應時間,計算量小,反應迅速。該人工勢場對前輪轉(zhuǎn)角的作用力并不是很大。在PID控制下,橫向誤差接近0.1m;在加入了人工勢場后的控制系統(tǒng)不僅沒有加長運算時間而且能夠相比于單一的PID控制來說該控制方法能夠有效地減小橫向誤差,達到了0.05m左右。人工勢場力對航向誤差的影響較小。
5 結(jié)論
本文在傳統(tǒng)的PID和預瞄模型的基礎(chǔ)上,增加了人工勢場對前輪轉(zhuǎn)角產(chǎn)生的作用力,引入預瞄時間和橫向速度這兩個狀態(tài)量對前輪轉(zhuǎn)角進行調(diào)節(jié)。仿真結(jié)果表明,所采用的的方法能夠較好的實現(xiàn)協(xié)調(diào)控制,減小了橫向誤差。因此,本文中提出的基于時變?nèi)斯輬鯬ID的智能汽車軌跡跟蹤控制具有一定的發(fā)展前景。
本文存在的不足之處是忽略了斥力對前輪轉(zhuǎn)角的影響,以及未將航向偏差作為時變參數(shù)的人工勢場的影響因素,之后會在此方面進行研究。
參考文獻:
[1]范世鵬,吳廣,王亮,劉運鵬,李伶,祁琪.基于改進人工勢場法的飛行器軌跡規(guī)劃[J].航天控制,2018,36(01):50-54.
[2]余志生,汽車理論[M].5版。北京:機械工程出版社,2015:144-147.
[3]劉法勇.基于改進人工勢場法的車道保持系統(tǒng)研究[D].合肥工業(yè)大學,2017.
